電動葫蘆能效建模與仿真
2016-01-29 03:51:42秦偉皓王松雷陸忠華徐榕
機(jī)械制造與自動化 2015年4期
秦偉皓,王松雷,陸忠華,徐榕
(1. 上海交通大學(xué) 機(jī)械與動力工程學(xué)院,上海 200240;2. 江蘇省特種設(shè)備安全監(jiān)督檢驗研究院 無錫分院,江蘇 無錫 214174)
電動葫蘆能效建模與仿真
秦偉皓1,王松雷2,陸忠華2,徐榕1
(1. 上海交通大學(xué) 機(jī)械與動力工程學(xué)院,上海 200240;2. 江蘇省特種設(shè)備安全監(jiān)督檢驗研究院 無錫分院,江蘇 無錫 214174)
摘要:提出了一種用于評價電動葫蘆能效的指標(biāo)——能效系數(shù),并給出了用于計算能效系數(shù)的數(shù)學(xué)模型,在MATLAB/Simulink中進(jìn)行相應(yīng)的仿真。以CD116-9型電動葫蘆為例,探究了負(fù)載和行程對能效系數(shù)的影響規(guī)律。通過現(xiàn)場實(shí)驗的結(jié)果驗證了仿真模型的正確性,并對實(shí)驗與仿真結(jié)果之間的差異進(jìn)行了分析。
關(guān)鍵詞:電動葫蘆;能效數(shù)學(xué)模型;能效仿真模型;能效系數(shù);能效測試
Modeling and Simulation for Electric Hoists’ Energy Efficiency
QIN Weihao1, WANG Songlei2,LU Zhonghua2, XU Rong1
(1. School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China;
2. Jiangsu Institute of Special Equipment Safety Supervision and Inspection, Wuxi Branch, Wuxi 214174, China)
Abstract:This paper introduceds energy efficiency coefficient which can be used as an index for evaluating electric hoists’ energy efficiency, gives out its mathematical model and builds its simulation model in MATLAB/Simulink environment. In addition, it also uses the simulation model to discuss the influence of two factors on the energy efficiency efficient. And then it validates our simulation results by field test and analyzes the differences between simulation and test results.
Keywords:electric hoist; energy efficiency mathematical model; energy efficiency simulation model; energy efficiency coefficient; energy efficiency test
0引言
節(jié)約能源是一項重要措施,能夠在一定程度上提高經(jīng)濟(jì)效益,是增強(qiáng)企業(yè)競爭力的必然要求。以電動葫蘆作為起升機(jī)構(gòu)的起重機(jī)是使用量最大、數(shù)量增長最快的起重機(jī)品種。研究電動葫蘆的能效測試方法,對電動葫蘆能效等級劃分、能效檢測和節(jié)能設(shè)計、節(jié)能監(jiān)管等都具有重要意義。
目前尚未發(fā)現(xiàn)將電動葫蘆作為完整的機(jī)構(gòu)進(jìn)行能效測試和評價對象的國外文獻(xiàn)[1],國內(nèi)在電動葫蘆領(lǐng)域能耗測試方法領(lǐng)域的研究和應(yīng)用剛剛起步[2],僅有少量的研究成果。目前對于電動葫蘆的能效研究存在以下一些不足[3]:1) 目前采用的能效評價指標(biāo)不太適用于以起降循環(huán)為基本運(yùn)行單位的電動葫蘆;2) 對于電動葫蘆能效的理論分析涉及很少;3) 沒有系統(tǒng)的研究各種影響因素對電動葫蘆能效影響的規(guī)律[4],而這些規(guī)律是制定合理的能效測試方法的依據(jù)。文中針對現(xiàn)有研究的不足,做了一些探索。
1電動葫蘆的分類與結(jié)構(gòu)特點(diǎn)
以結(jié)構(gòu)特點(diǎn)作為分類標(biāo)準(zhǔn),我國通常將電動葫蘆分為常速鋼絲繩電動葫蘆、常慢速鋼絲繩電動葫蘆、環(huán)鏈電動葫蘆、板鏈電動葫蘆等幾種型式。
雖然電動葫蘆的具體形式很多,但是從結(jié)構(gòu)組成和傳動形式上來看則大同小異。現(xiàn)以常見的CD型鋼絲繩電動葫蘆為例。CD型鋼絲繩電動葫蘆由驅(qū)動部分、制動部分、傳動部分和取物纏繞部分組成[1]。其中驅(qū)動和制動兩個裝置是合二為一的錐形制動鼠籠電動機(jī),傳動裝置為三級或四級圓柱齒輪減速器,取物裝置為吊鉤、鋼絲繩和卷筒。從結(jié)構(gòu)組成和能量傳遞的角度來看,可將電動葫蘆劃分為電氣傳動部分和機(jī)械傳動部分。需要注意的是,電動葫蘆的制停采用的是二合一錐形電機(jī)的錐形制動器,是一種機(jī)械制動。CD型鋼絲繩電動葫蘆在下降物時,采用的是回饋制動方式,由錐形驅(qū)動電機(jī)提供與重物的重力矩相互抵消的電磁轉(zhuǎn)矩。
2電動葫蘆運(yùn)行特點(diǎn)
電動葫蘆的驅(qū)動電機(jī)承受的負(fù)載轉(zhuǎn)矩由兩部分組成:一部分是由吊鉤上重物的重力產(chǎn)生的位能性負(fù)載轉(zhuǎn)矩Tz;另一部分是由于機(jī)械傳動系統(tǒng)的摩擦產(chǎn)生的阻抗性負(fù)載轉(zhuǎn)矩Tf。為簡化分析,當(dāng)電動葫蘆提升或者下降重物時,忽略摩擦轉(zhuǎn)矩Tf,僅考慮由重力產(chǎn)生的位能性轉(zhuǎn)矩TZ。而當(dāng)電動葫蘆空鉤上升和下降時,忽略吊鉤的質(zhì)量,僅考慮傳動系統(tǒng)的摩擦轉(zhuǎn)矩Tf[2]。電動葫蘆在各種負(fù)載狀態(tài)下的工作特性如圖1所示。

圖1 電動葫蘆四象限運(yùn)行時的工作特性
當(dāng)電動葫蘆提升重物時,錐形驅(qū)動電機(jī)將沿第一象限的機(jī)械特性曲線ab加速運(yùn)行,并最終穩(wěn)定在b點(diǎn)。這個過程中,電機(jī)處于正向電動狀態(tài),從電網(wǎng)中吸收有功電能。當(dāng)電動葫蘆下降重物時,驅(qū)動電機(jī)將首先沿著第三象限的機(jī)械特性曲線a’c’加速運(yùn)行,這個過程中,電機(jī)的轉(zhuǎn)速小于同步速,處于反向電動狀態(tài),從電網(wǎng)吸收電能。隨著電機(jī)轉(zhuǎn)速的進(jìn)一步升高,電機(jī)將繼續(xù)沿著第四象限的機(jī)械特性曲線c’b’加速運(yùn)行,并最終穩(wěn)定在b’點(diǎn)。這個過程之中,電機(jī)處于回饋制動狀態(tài),向電網(wǎng)回饋電能。
當(dāng)電動葫蘆空鉤上升時,電機(jī)的工作特性與提升重物時是相同的,只是電機(jī)承受的負(fù)載轉(zhuǎn)矩為較小的摩擦轉(zhuǎn)矩。因此,驅(qū)動電機(jī)仍然沿第一象限的機(jī)械特性曲線加速運(yùn)行,但最終穩(wěn)定在d點(diǎn)。此時電機(jī)處于正向電動狀態(tài),從電網(wǎng)中吸收有功電能。而當(dāng)電動葫蘆空鉤下降時,驅(qū)動電機(jī)將沿第三象限的機(jī)械特性曲線a’d’加速運(yùn)行并最終穩(wěn)定在d’點(diǎn)。整個過程中,電機(jī)始終處于反向電動狀態(tài),從電網(wǎng)吸收電能。
3電動葫蘆能效評價指標(biāo)
電動葫蘆是一種間歇工作的垂直運(yùn)輸工具,運(yùn)送的載荷屬于位能性負(fù)載。通常的工作方式是將一定量的載荷運(yùn)送到上方,也需將這些載荷運(yùn)回到下方,上下運(yùn)送量基本相等。電動葫蘆的能效評價時應(yīng)當(dāng)對一個包含上升和下降兩個過程的完整工作循環(huán)進(jìn)行考察,而不單單是考察上升或者下降過程中的效率,因此不能簡單借用傳統(tǒng)的以單向能量傳遞為主要工作形式的能效指標(biāo)(如:電動機(jī)的效率)。
為了體現(xiàn)電動葫蘆以起降工作循環(huán)作為運(yùn)行基本單位的工作特點(diǎn),提出以電動葫蘆能效系數(shù)δ作為評價電動葫蘆能源利用效率的指標(biāo)。電動葫蘆能效系數(shù)是指完成單位輸送量kgm(千克米)的用電量J(焦耳)。
電動葫蘆能效系數(shù)δ的定義式如下:
式中:δ——電動葫蘆的能效系數(shù),單位為J/kgm;
Ec——電動葫蘆在規(guī)定的工作循環(huán)內(nèi),從電網(wǎng)輸入的電能(測試值),單位是J;
Wz——電動葫蘆在測試周期內(nèi),吊鉤運(yùn)送有效載荷完成的工作量,即每次運(yùn)送的有效載荷質(zhì)量m(負(fù)載)與被移動的垂直起升距離h(行程)之乘積,單位為kgm;
Ec1——起升重物的過程中,電動葫蘆從電網(wǎng)中吸收的有功電能,單位是J;

根據(jù)能效系數(shù)的定義可知:能效系數(shù)越大表明完成單位工作量時浪費(fèi)的電量越多,則電動葫蘆的能效越低。
采用能效指標(biāo)δ對電動葫蘆的能效進(jìn)行評價有以下幾個優(yōu)點(diǎn):1) 物理含義清晰,能夠直觀地反應(yīng)出電動葫蘆的能耗水平。2) 這個指標(biāo)可以把重物的上升和下降過程統(tǒng)一在一起,可以反映電動葫蘆以起降工作循環(huán)為基本工作單位的特點(diǎn)。3) 能效系數(shù)指標(biāo)的建立思想與世界能源委員會對“能源效率”定義——“減少提供同等能源服務(wù)的能源投入”的思想基本一致。
4電動葫蘆能效數(shù)學(xué)模型
常見的電動葫蘆可以分解為電氣傳動部分和機(jī)械傳動部分2個組成部分。
電動葫蘆的電氣傳動部分的關(guān)鍵是鼠籠型三相異步電動機(jī)。為了能夠更加精確地描述電機(jī)的動態(tài)過程,對電機(jī)采用瞬態(tài)數(shù)學(xué)模型加以描述。在自然坐標(biāo)系下電機(jī)的瞬態(tài)數(shù)學(xué)模型是一個高階、非線性、強(qiáng)耦合的常微分方程組,為了計算的方便,先給出驅(qū)動電機(jī)在正交旋轉(zhuǎn)坐標(biāo)系d-q-0坐標(biāo)系下的瞬態(tài)數(shù)學(xué)模型[3]。然后再通過坐標(biāo)反變換,將d-q-0坐標(biāo)系下的各個電量還原到自然坐標(biāo)系中,再進(jìn)行電機(jī)部分的能量傳遞和損耗分析。
電動葫蘆的驅(qū)動電機(jī)在d-q-0坐標(biāo)系下的瞬態(tài)數(shù)學(xué)模型主要由狀態(tài)變量的初始值和狀態(tài)方程兩部分組成,如式(1)。
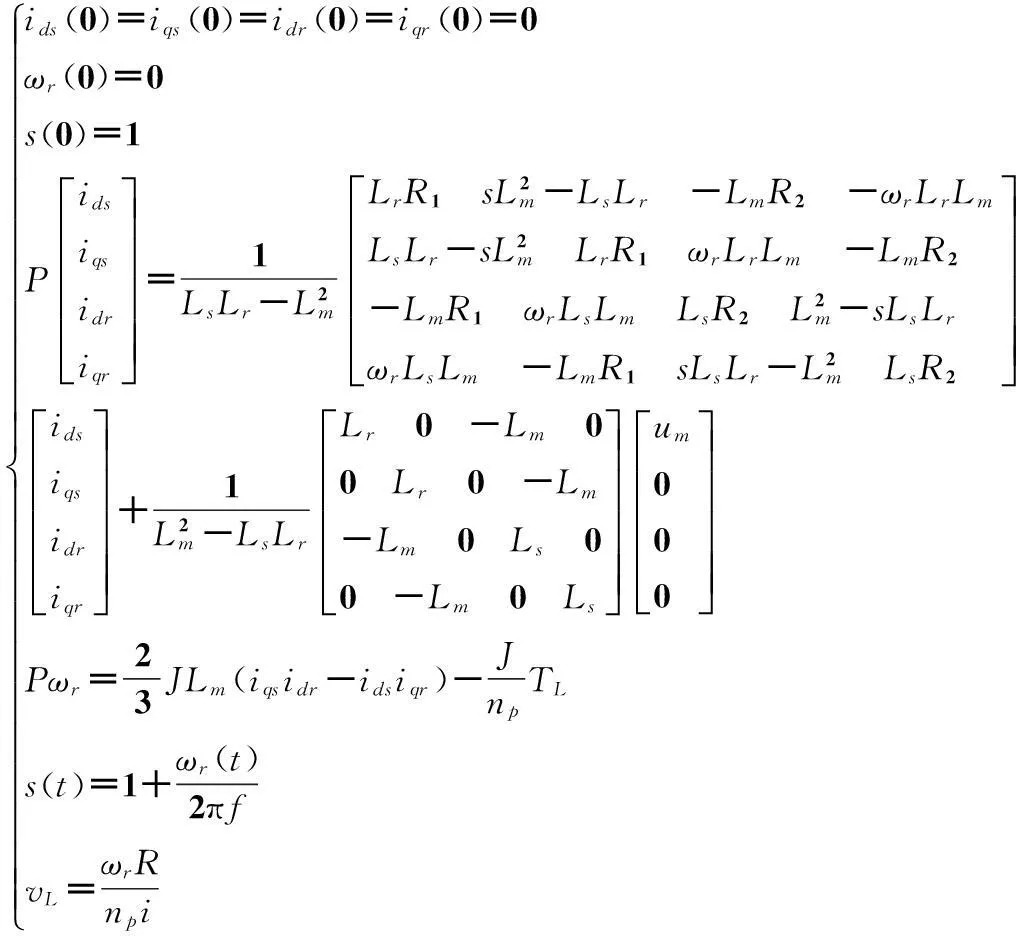
電動葫蘆的機(jī)械傳動部分則采用等效折算的方法,即將負(fù)載的重力矩折算為電機(jī)軸上等效負(fù)載轉(zhuǎn)矩,并將位于不同軸位置上的飛輪矩折算為電機(jī)主軸上的等效飛輪矩,將機(jī)械傳動部分的多軸系統(tǒng)等效為一個單軸系統(tǒng)。
負(fù)載轉(zhuǎn)矩由式(2)確定。
起升重物時:
(2)
式中,t1為起升重物階段電機(jī)啟動的時刻,t2為起升重物階段電機(jī)斷電的時刻。
下降重物時:
(3)
顯然,當(dāng)給出電機(jī)的輸入電壓參數(shù)以及重物的質(zhì)量m時,并將電機(jī)參數(shù)代入方程,就可以通過求解方程得到ids、iqs、idr、iqr以及重物的線速度vL。
為了得到電機(jī)的輸入功率,還需要求解在自然坐標(biāo)系下的電機(jī)定子電流iA、iB、iC。iA、iB、iC與ids、iqs存在如下的關(guān)系:
(4)
其中,θc=θc(0)+2πf(t2-t1);t1為電機(jī)通電的時刻;t2為電機(jī)斷電的時刻。
將上面求解的結(jié)果帶入到能效系數(shù)δ的計算公式:
(5)
就得到了電動葫蘆的能效數(shù)學(xué)模型。
5電動葫蘆能效仿真
5.1電動葫蘆能效仿真模型
上述一節(jié)中建立的電動葫蘆能效數(shù)學(xué)模型是一個復(fù)雜的非線性常微分方程組,無法得到其解析形式解,只能借助數(shù)值計算方法,在此借用MATLAB的仿真工具箱Simulink中建立與數(shù)學(xué)模型相應(yīng)的電動葫蘆能效仿真模型。該仿真模型包含起升重物過程能效仿真和下降重物過程能效仿真兩部分,兩個部分的結(jié)構(gòu)大致相同。下面以起升重物過程能效仿真模型為例,說明仿真模型的構(gòu)成。起升重物過程電動葫蘆能效仿真模型的電氣傳動部分和機(jī)械傳動部分的仿真模型分別如圖2和圖3所示。
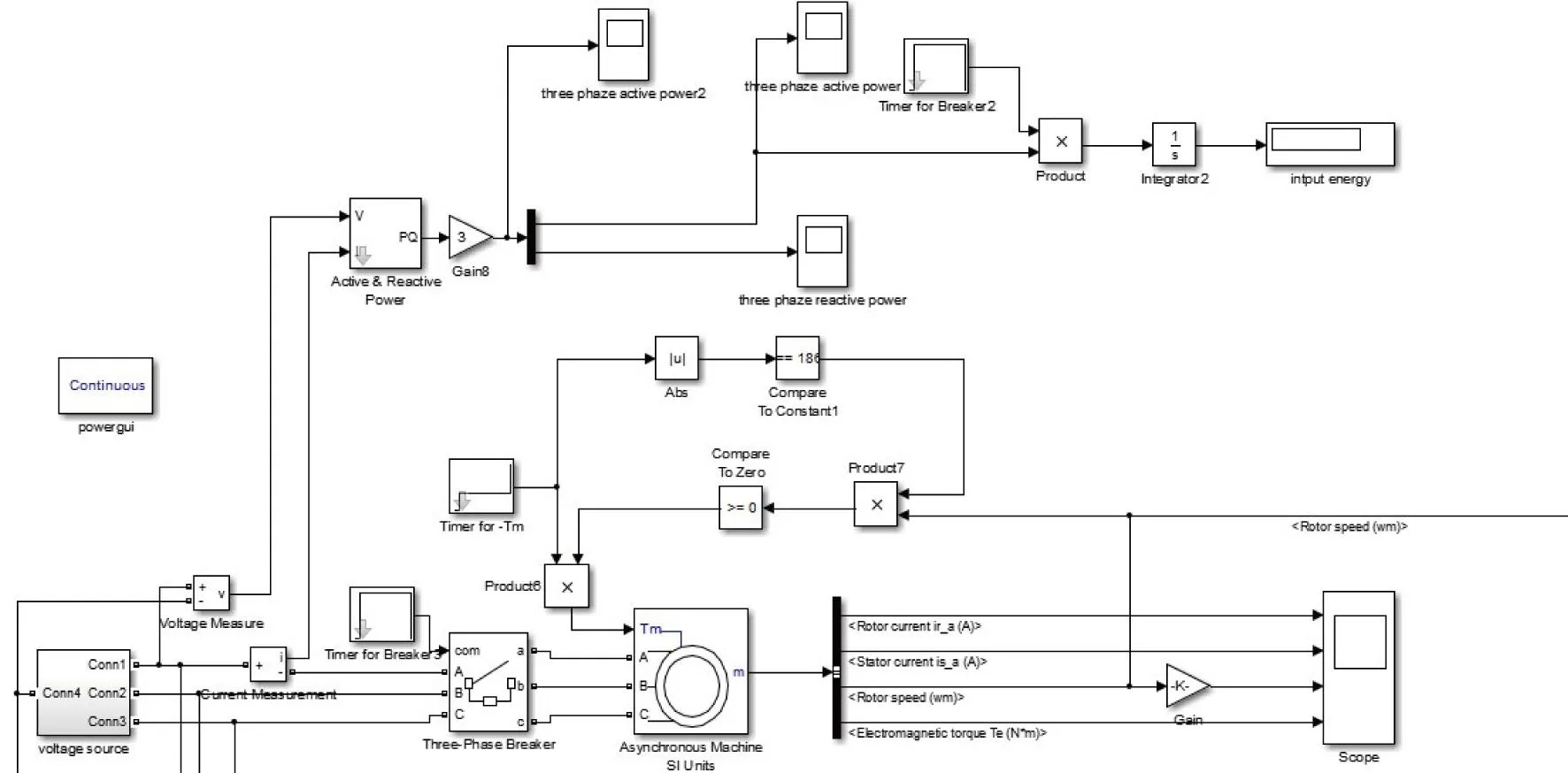
圖2 電動葫蘆的電氣傳動部分仿真模型

圖3 電動葫蘆的機(jī)械傳動部分仿真模型
將上述的兩個模型連接在一起就可以得到電動葫蘆起升重物過程的能效仿真模型。采用同樣的方法可以得到電動葫蘆下降重物過程的能效仿真模型。
以CD116-9型電動葫蘆為例設(shè)定仿真模型參數(shù),通過仿真結(jié)果來初步驗證能效仿真模型的合理性。CD116-9型電動葫蘆以及所用的電動機(jī)的銘牌參數(shù)分別如表1、表2所示。

表1 CD1 16-9型電動葫蘆銘牌參數(shù)
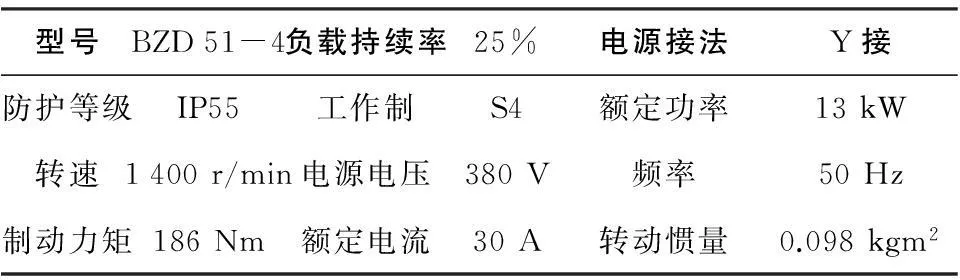
表2 CD1 16-9型電動葫蘆錐形
圖4從上到下顯示的依次是起升重物過程中電機(jī)的定子A相電流、轉(zhuǎn)子a相電流、轉(zhuǎn)速和電磁轉(zhuǎn)矩。從圖4可以看出,電動機(jī)的速度在經(jīng)歷了短暫波動以后維持在一個略小于同步速的穩(wěn)定速度上;啟動過程明顯,剛啟動時,定、轉(zhuǎn)子的沖擊電流很大,在勻速狀態(tài)下電流輸出穩(wěn)定,符合實(shí)際情況。圖5顯示的是電動葫蘆起升重物過程中電機(jī)從電網(wǎng)獲得的有功功率(實(shí)線)和無功功率(虛線)。可以看出,在電機(jī)啟動瞬間的瞬時功率較高,隨后恢復(fù)到一個穩(wěn)定的水平,反映了電機(jī)啟動過程中瞬時電流沖流。
圖4 電動葫蘆上升過程仿真模型中電機(jī)模塊的輸出

圖5 電動葫蘆上升過程有功功率和無功功率仿真結(jié)果
圖6從上到下顯示的依次是下降重物過程中電機(jī)的定子A相電流、轉(zhuǎn)子a相電流、轉(zhuǎn)速和電磁轉(zhuǎn)矩。從圖6可以看出,電動機(jī)的穩(wěn)定運(yùn)行速度略大于同步速,這是回饋制動的一個特點(diǎn);而且速度的穩(wěn)定值是一個負(fù)值,體現(xiàn)了下降過程的轉(zhuǎn)速與上升過程轉(zhuǎn)速相反的特點(diǎn)。圖7顯示的是電動葫蘆下降重物過程中電機(jī)從電網(wǎng)獲得的有功功率(實(shí)線)和無功功率(虛線)。可以看出:在啟動開始階段,有功功率為正值,隨后轉(zhuǎn)變?yōu)樨?fù)值而且穩(wěn)定值保持為一個穩(wěn)定的負(fù)值,這與第2節(jié)對電動葫蘆下降重物過程中工作特性的分析一致,即:電機(jī)先是處于反向電動狀態(tài)從電網(wǎng)吸收電能,當(dāng)轉(zhuǎn)速超過同步速時則工作在回饋制動狀態(tài),因此向電網(wǎng)回饋電能。
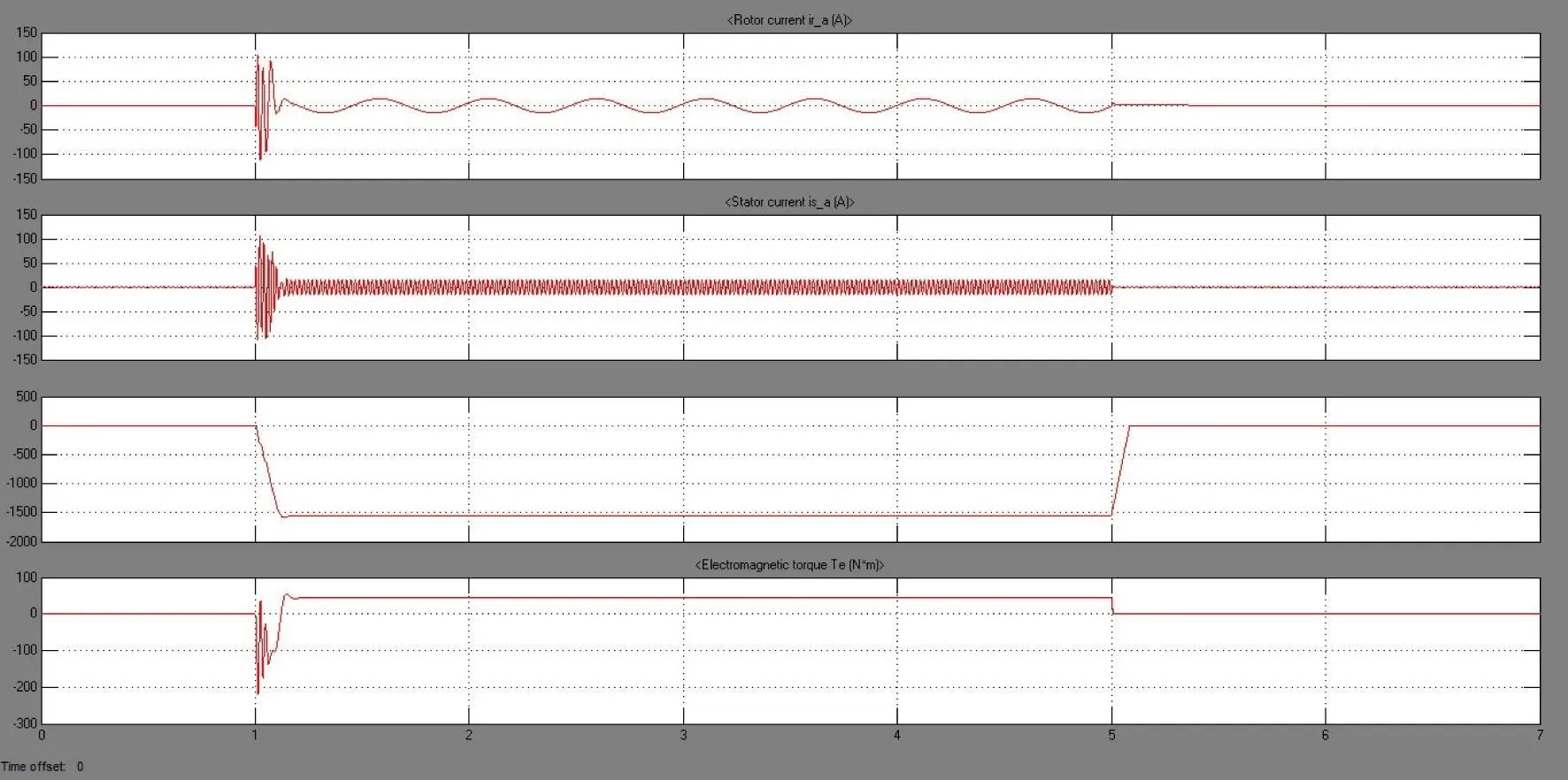
圖6 電動葫蘆下降過程仿真模型中電機(jī)模塊的輸出
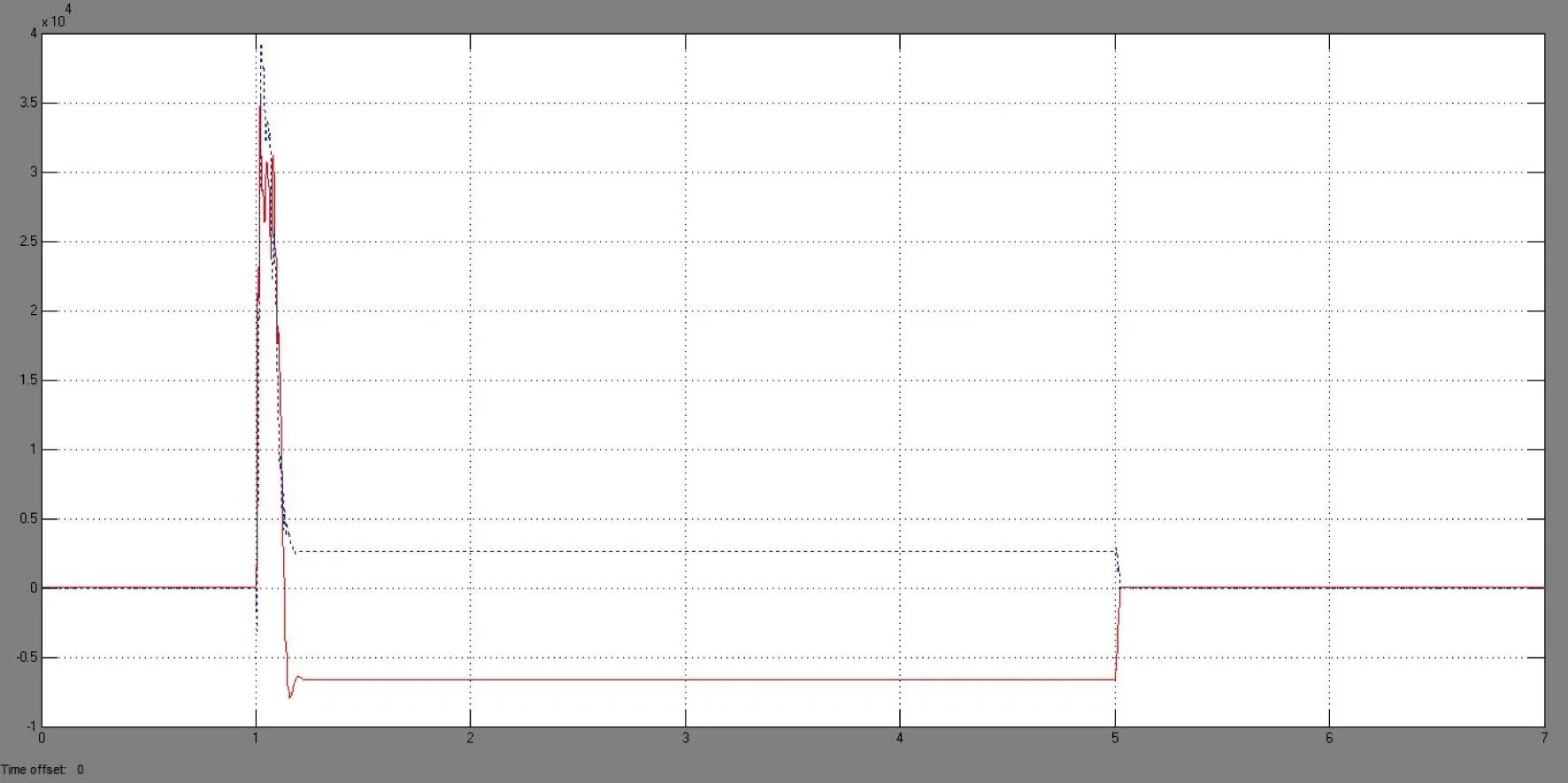
圖7 電動葫蘆下降過程有功功率和無功功率仿真結(jié)果
5.2兩種影響因素的能效仿真
利用5.1節(jié)建立的能效仿真模型定量地探究負(fù)載和行程這兩種因素對能效的影響規(guī)律。
在負(fù)載與能效系數(shù)關(guān)系仿真中,設(shè)定仿真模型的起升和下降過程均為12s,電機(jī)模型的負(fù)載轉(zhuǎn)矩分別依據(jù)負(fù)載為空載、2t、5t、8t、13t、15t和16t來確定。結(jié)果如圖8所示, 圖中橫坐標(biāo)為負(fù)載,縱坐標(biāo)為能效系數(shù)。在負(fù)載與行程關(guān)系仿真中,設(shè)定電動葫蘆負(fù)載恒定為8t,通過改變起降時間控制起降高度,起降時間分別設(shè)為4s,8s,12s,16s,20s,30s,40s,50s。結(jié)果如圖9所示, 圖中橫坐標(biāo)為行程,縱坐標(biāo)為能效系數(shù)。

圖8 CD1 16-9型電動葫蘆負(fù)載與能效系數(shù)關(guān)系(仿真)

圖9 CD1 16-9型電動葫蘆行程與能效系數(shù)關(guān)系(仿真)
由圖8可以看出CD116-9型鋼絲繩電動葫蘆的能效系數(shù)隨負(fù)載變化的規(guī)律:隨著負(fù)載的增加,電動葫蘆能效系數(shù)先逐漸減小,即電動葫蘆對電能的利用效率逐漸升高;當(dāng)負(fù)載超過50%額定起重量后,能效系數(shù)隨著載荷的增加變動較小,能效系數(shù)的變化逐漸趨于穩(wěn)定。
圖9反映了CD116-9型鋼絲繩電動葫蘆的能效系數(shù)隨行程變化的規(guī)律:隨著行程的增加,電動葫蘆能效系數(shù)先逐漸減小;當(dāng)行程超過25%的起升高度后,隨著行程的增加,能效系數(shù)變動較小,逐漸趨于某一穩(wěn)定值。
6電動葫蘆能效測試實(shí)驗
為了對上述的理論分析和仿真結(jié)果進(jìn)行驗證,采用國家橋門式起重機(jī)械產(chǎn)品質(zhì)量監(jiān)督檢驗中心的電動葫蘆多功能試驗臺進(jìn)行了能效測試實(shí)驗,試驗臺的組成如圖10所示。借助該實(shí)驗臺,可以測量電動葫蘆起降重物的實(shí)際運(yùn)行速度、運(yùn)行時間,以及起升重物和下降重物階段輸入電動葫蘆的電流有效值、電壓有效值、有功功率、無功功率、功率因數(shù)。

圖10 電動葫蘆多功能實(shí)驗臺的組成
實(shí)驗中采用的電動葫蘆能效系數(shù)的計算公式為:
(6)
式中:重物質(zhì)量為m,重力加速度g=9.8m/s2,提升重物過程中三相交流電電壓有效值為Ui1(i=1,2,3),電流有效值為Ii1(i=1,2,3),功率因數(shù)cosφ1,下降重物過程中三相交流電電壓有效值為Ui2(i=1,2,3),電流有效值為Ii2(i=1,2,3),功率因數(shù)cosφ2,上升和下降時間均為t。
在負(fù)載與能效系數(shù)關(guān)系實(shí)驗中,設(shè)定起升12s,下降12s,考慮到電動葫蘆的持續(xù)負(fù)載率要求,在起降之間暫停10s[4]。負(fù)載分別為空載、2t、5t、8t、13t、15t和16t,每組實(shí)驗重復(fù)3次。每種負(fù)載下的能效系數(shù)取該負(fù)載下3次實(shí)驗結(jié)果的平均值,將實(shí)驗結(jié)果和仿真結(jié)果做在同一張圖11中,其中線1為仿真結(jié)果曲線,線2為實(shí)驗結(jié)果曲線。在行程與能效系數(shù)關(guān)系實(shí)驗中,電動葫蘆負(fù)載恒定為8t,通過改變起升、下降的時間控制起降高度。起升時間分別設(shè)為4s,8s,12s,16s和20s,每組實(shí)驗的起降時間相同,起降之間的間隔時間設(shè)為10s,每組實(shí)驗重復(fù)3次。同樣每種行程下的能效系數(shù)取該行程下3次實(shí)驗結(jié)果的平均值,將實(shí)驗結(jié)果和仿真結(jié)果做在同一張圖12中,其中線1為仿真結(jié)果曲線,線2為實(shí)驗結(jié)果曲線。
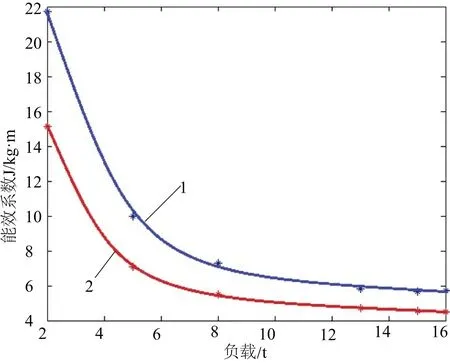
圖11 CD1 16-9型電動葫蘆負(fù)載與能效系數(shù)關(guān)系(仿真與實(shí)驗)

圖12 CD1 16-9型電動葫蘆行程與能效系數(shù)關(guān)系(仿真與實(shí)驗)

從圖12可以看出如下一些特點(diǎn):1) 仿真結(jié)果值均高于實(shí)驗結(jié)果值。其原因與圖11中出現(xiàn)的仿真結(jié)果高于實(shí)驗結(jié)果現(xiàn)象的原因是相同的。2) 在行程較小時,仿真值與實(shí)驗值偏差較大;隨著行程的增加,仿真結(jié)果值與實(shí)驗結(jié)果值越來越接近。出現(xiàn)這個現(xiàn)象的原因是,由于起升重物時啟動瞬間的沖擊功率、下降重物時正的有功功率以及加速階段的速度小于穩(wěn)定速度這些現(xiàn)象的存在,使得仿真結(jié)果大于實(shí)驗結(jié)果。當(dāng)行程較小時,這些效應(yīng)的影響很明顯,因此在圖12中可以看出在行程較小時,仿真的能效系數(shù)遠(yuǎn)高于實(shí)驗的能效系數(shù)。而隨著運(yùn)行時間的增長,上述效應(yīng)在整個運(yùn)行過程中所占的比例越來越小,對能效系數(shù)的影響逐漸變得不再明顯,這時仿真結(jié)果與實(shí)驗結(jié)果就比較接近。
7結(jié)論
對電動葫蘆的能效進(jìn)行了建模、仿真以及實(shí)驗研究,為電動葫蘆的能效測試方法研究打下了基礎(chǔ)。主要結(jié)論如下:
1) 電動葫蘆在一個完整起降循環(huán)過程中能量的流動方向具有如下的特點(diǎn):電動葫蘆在起升重物時,從電網(wǎng)吸收電能;下降重物時,向電網(wǎng)回饋電能。電動葫蘆在空鉤起降的整個循環(huán)中,始終從電網(wǎng)吸收電能。根據(jù)這一特點(diǎn),提出了更適合于評價電動葫蘆能量利用效率的評價指標(biāo)——能效系數(shù)。
2) 建立了計算電動葫蘆能效系數(shù)的數(shù)學(xué)模型。并以數(shù)學(xué)模型為基礎(chǔ),在MATLAB/Simulink中建立相應(yīng)的仿真模型,該模型具有較好的實(shí)用性,為理論研究電動葫蘆的能效提供了一種手段。
3) 通過仿真與實(shí)驗相結(jié)合,歸納出了電動葫蘆的能效系數(shù)與負(fù)載和行程的關(guān)系:隨著負(fù)載的增加,電動葫蘆能效系數(shù)先逐漸減小;當(dāng)負(fù)載超過50%額定起重量后,能效系數(shù)的變化逐漸趨于穩(wěn)定。隨著行程的增加,電動葫蘆能效系數(shù)先逐漸減小;當(dāng)行程超過25%的起升高度后,隨著行程的增加,能效系數(shù)變動較小,逐漸趨于某一穩(wěn)定值。
參考文獻(xiàn):
[1] 宮本智. 葫蘆式起重機(jī)[M]. 天津: 天津科學(xué)技術(shù)出版社, 2009.
[2]劉錦波,張承慧. 電機(jī)與拖動 [M]. 北京: 清華大學(xué)出版社, 2006.
[3]辜承林,陳喬夫,熊永前. 電機(jī)學(xué)[M]. 武漢: 華中科技大學(xué)出版社, 2005.
[4]JB/T 9008.4-2004. 鋼絲繩電動葫蘆試驗方法[S]. 全國起重機(jī)械標(biāo)準(zhǔn)化技術(shù)委員會, 2004.


收稿日期:2014-01-10
中圖分類號:Tp11+.3;TP391.9
文獻(xiàn)標(biāo)志碼:B
文章編號:1671-5276(2015)04-0080-06
作者簡介:秦偉皓(1986-),男,河南南陽人,碩士研究生,主要研究方向為機(jī)械電子。
