基于神經-內分泌協調機制的多AGV調度研究
2016-01-29 03:51:50唐敦兵陸曉春鄭堃
機械制造與自動化 2015年4期
唐敦兵,陸曉春,鄭堃
(南京航空航天大學 機電學院,江蘇 南京 210016)
基于神經-內分泌協調機制的多AGV調度研究
唐敦兵,陸曉春,鄭堃
(南京航空航天大學 機電學院,江蘇 南京 210016)
摘要:為解決多AGV系統中的任務調度及協調控制問題,受神經-內分泌協調機制的啟發,結合混合區域控制模型,建立了任務、制造單元及AGV之間相互刺激的激素分泌模型,并在此基礎上提出了基于神經-內分泌協調機制的多AGV任務分配及調度機制。結合實例進行了調度仿真實驗,驗證了此方法的可行性和有效性。
關鍵詞:多AGV;任務調度;協調控制;神經-內分泌協調機制;仿真實驗
Research on Multi-AGV Scheduling Based on Neuro-endocrine Coordination Mechanism
TANG Dunbing, LU Xiaochun, ZHENG Kun
(College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics
and Astronautics, Nanjing 210016, China)
Abstract:To solve the task scheduling and coordination problems in multi-AGV system, gaining enlightenment from the neure-endocrine coordination mechanism and combining the mixed regional control model, this paper build the hormone secretion model of the stimulation among task, manufacturing unit and AGV, then, proposes the multi-AGV task assignment and scheduling mechanism based on the neuro-endocrine coordination mechanism. The scheduling simulation experiments combined with specific examples are conducted and the feasibility and effectiveness of the proposed approach are verified.
Keywords:multi-AGV; task scheduling; coordination control; neuro-endocrine coordination mechanism; simulation
0引言
隨著現代制造系統的飛速發展,對制造系統的柔性和魯棒性提出了更高的要求[1]。自動導引小車系統(automated guided vehicle system, AGVS)作為現代制造系統中的關鍵子系統,以其特有的高度靈活性、柔性和高效性等顯著特點,極大地提高了現在制造系統的生產效率、魯棒性,降低了生產成本等[2]。因此,國內外眾多學者針對多AGV開展了大量研究,主要集中在以下三個方面:多AGV任務調度、多AGV路徑規劃及多AGV協調控制。任務調度是AGV的基本問題之一,主要解決在考慮當前約束下加工任務在多臺AGV上的分配及組合優化問題[3];路徑規劃主要解決在考慮當前環境參數下,多AGV系統在得到新任務后,從任務起始點到任務目標點的路徑問題;協調控制是多AGV系統的最關鍵問題,主要解決在實時運行時多臺AGV可能出現的碰撞、死鎖等問題[4]。
由于多AGV系統是一個實時并發的系統,集中在線式的路徑規劃、協調控制存在運算時間長、控制滯后的問題,因此無法取得令人滿意的控制效果。
生物體在復雜動態環境下有著很強的適應能力和應變能力,能夠針對內外界環境的變化迅速對自身相關功能活動進行協調,達到新的動態平衡狀態。神經-內分泌協調機制作為維持生物體內環境穩態的重要生理機制,蘊含著豐富而復雜的分布式信息處理與協調機制,體現出高度的自適應和自組織性[5]。因此,文中在深入研究神經-內分泌協調機制在生物體內重要作用的基礎上,借鑒神經-內分泌協調機制的優秀特性,將之應用于多AGV系統的任務調度、協調控制中,并開展了相應仿真實驗。
1神經-內分泌協調機制
神經系統是人體內起主導作用的功能調節系統,體內各器官、系統的功能和各種生理過程等均受神經系統的直接或間接調控,從而相互協調,共同完成機體的各項功能活動。
內分泌系統作為人體另一重要調節系統,由內分泌腺、內分泌細胞及激素組成。內分泌系統作為機體重要的調節系統,通過分泌激素來調節體內各組織器官的功能。
神經系統和內分泌系統存在著廣泛的聯系和相互作用。一方面,神經系統接受機體內外環境的各類刺激,將之轉化為神經沖動,刺激內分泌腺的激素分泌,對內分泌系統有著調控作用;另一方面,內分泌系統可以通過分泌激素改變神經系統對特定刺激的敏感度,從而影響神經系統的活動。
神經系統對機體的調節主要通過神經調節進行,神經調節的結構基礎是反射弧,反射弧中傳導的是電信號,因此神經調節的最大特點是調節迅速。神經沖動可以由反射弧直接傳導至效應器,調節范圍準確。神經遞質在起作用后立刻被分解,因此作用時間很短暫。內分泌調節則是通過血液、組織液等內分泌循環將激素、CO2等化學物質運送至全身各處組織與器官,進而調節各項生理活動,因此內分泌調節的速度相對緩慢。但全身組織、細胞只要由相應的激素受體機體接受調控,調控范圍相當廣泛;同時,激素在發揮作用后不會馬上消散,仍會存在一段時間,可以繼續對組織器官進行調節,故內分泌調節的作用時間較長。
神經調節與內分泌調節以其各自的特點,相互協調配合,在維持機體內環境穩態上發揮著重要作用。寒冷環境中機體體溫的恒定維持是神經-內分泌協調機制相互作用,維持內環境穩態的一個典型例子,具體過程如圖1所示。

圖1 寒冷環境中機體體溫恒定維持示意圖
下丘腦在感受到寒冷刺激后,可以直接調節骨骼肌、腎上腺等組織器官的活動,同時也能控制垂體等內分泌腺的激素分泌,從而減少散熱,增加產熱,維持機體體溫恒定。
2多AGV調度系統建模
2.1混合區域控制模型
混合區域控制模型[6]基于傳統的串聯區域控制模型,針對其若干缺陷進行了改進,使其更適合于分布式控制。基于混合區域控制模型的多AGV調度系統路徑布局如圖2所示。
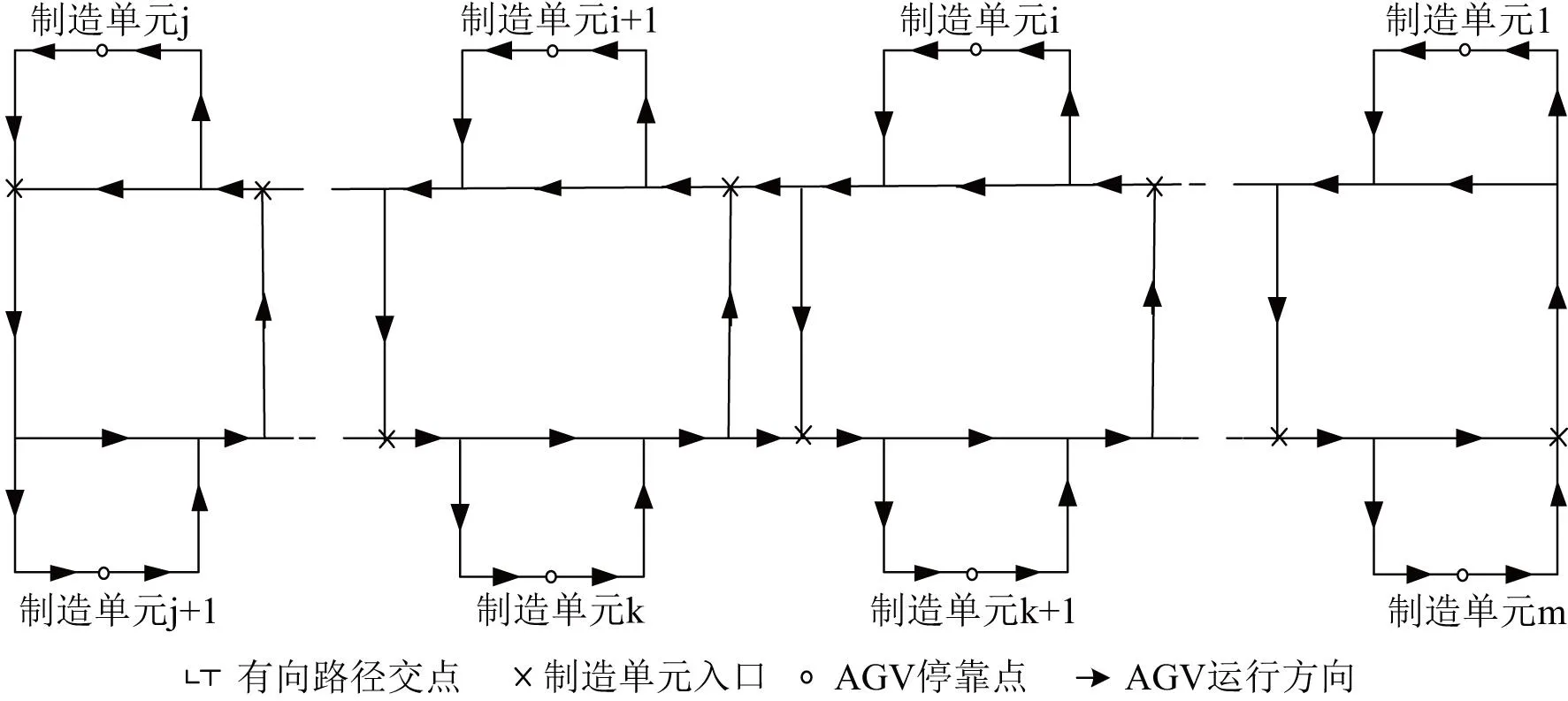
圖2 混合區域控制模型AGV路徑布局
混合區域控制模型中,多AGV調度系統由若干具有相同結構,獨立且緊密聯系的制造單元控制區域組成,AGV在各個區域之間的運行受各制造單元區域控制器控制,有利于發揮分布式控制的優勢。
2.2激素調節規律
Farhy曾提出內分泌激素通用調節規律[7]:激素的調節規律具有單調性和非負性,激素的上升及下降均遵循Hill函數規律,如式(1)及式(2)所示:
(1)
(2)
其中,G為函數自變量;T為閾值,且T>0;n為Hill系數,且n≥1。如果激素A受激素B調控,則激素A的分泌速率SA與激素B的濃度CB存在以下關系:
SA(CB)=aFup(down)(CB)+SA0
(3)
其中,a為常量系數,SA0為激素A的初始分泌速率。
2.3多AGV系統調度模型
根據激素調節規律對基于混合區域模型的多AGV調度系統進行建模。
多AGV調度系統中,新生產任務的到來對各制造單元產生刺激,制造單元根據生產任務中具體的工件工序、加工時間等信息按式(4)分泌制造單元激素,激素的濃度代表制造單元對某一工件工序的加工能力。
(4)

(5)
(6)
(7)
制造單元接受到系統中各AGV分泌的激素刺激后,選擇其中激素濃度最大的AGV來執行本單元的工件運輸任務,這樣就可以保證每次的工件運輸任務都由最佳的AGV來執行,縮短了系統的總體運行時間,提高了系統的生產效率。
3基于神經-內分泌協調機制的任務分配及調度機制
為了提高系統中各機床的利用效率、減少AGV的空閑等待時間,并提出基于神經-內分泌協調機制的任務分配及調度機制,以提高系統的生產效率。
基于神經-內分泌的任務分配及調度機制主要解決生產任務在各個制造單元的分配、組合優化以及各工件運輸任務在AGV上的分配問題,使系統能夠達到一個相對較優的生產狀態,維持在較高的生產水平。



5) 循環執行步驟1)~4)直至所有工件工序得到分配,則停止對新生產任務的分配和調度,系統繼續運行。
采用此任務分配及調度機制,可以在生產任務到來時,通過制造單元之間、制造單元與AGV之間的相互協調,為每個具體的工件工序加工任務分配最合適的加工設備及AGV,從而提高系統的生產效率。
4多AGV調度仿真實驗平臺開發及驗證
4.1多AGV調度仿真實驗平臺
根據神經-內分泌協調機制開發的多AGV調度仿真實驗平臺如圖3所示,主要由AGV、制造單元、監控終端等模塊組成,其中,制造單元又由機床、工件緩沖區、機械手等組成。

圖3 多AGV調度仿真實驗平臺實物圖
4.2多AGV調度仿真實驗
假設有一生產任務W由三個工件組成,其中每個工件具有三道工序需要加工,每道工序均需在相應機床上加工一定時間,具體的任務參數如表1所示。

表1 生產任務參數表
系統中有6臺不同類型的機床,其中有2臺車床、2臺銑床、1臺磨床、1臺鉆床,具體機床參數如表2所示。

表2 機床參數表
生產任務產生后,根據神經-內分泌協調機制的任務分配機制進行任務分配,分配完成的任務加工序列如表3所示,對應的生產任務甘特圖如圖4所示。

表3 任務加工序列表

圖4 生產任務甘特圖
AGV根據此任務加工序列,在基于神經-內分泌協調機制的任務調度機制調度下,完成工件的出庫、機床間運輸、入庫等操作,最終執行完所有任務,返回初始位置。由此得到的AGV運行及等待具體時間如圖5所示。

圖5 AGV工作時間圖
統計AGV的總體運行時間、有效運行時間及空閑等待時間,具體的各類時間參數如圖6所示。

圖6 AGV運行時間參數圖
由此可以得到1號和2號AGV的總體運行效率η1,η2:
進一步分析實驗結果可知:針對具體的生產任務,基于神經-內分泌協調機制的任務分配及調度機制可以根據系統中各機床的當前狀態進行任務分配,得到當前狀態下的較優任務加工序列。同時,能夠根據AGV的當前狀態進行任務調度,最大化AGV的運行效率,從而提高系統的整體效率。
5結語
針對多AGV系統調度的復雜性,借鑒維持生物體內環境的神經-內分泌協調機制,提出了基于神經-內分泌協調機制的多AGV任務分配及調度機制,解決了多AGV系統中的任務調度及協調控制問題,并通過仿真實驗驗證了方法的可行性及有效性,結果表明該方法可以提高系統的運行效率。
參考文獻:
[1] 周凱, 劉成穎. 現代制造系統[M]. 北京:清華大學出版社, 2005.
[2] Iris FAVIS. Survey of research in the design and control of automated guided vehicle systems [J].European Journal of Operational Research, 2006, 170(3): 677-709.
[3] Tuan LE-ANH, MBM DE KOSTER. A review of design and control of automated guided vehicle systems [J]. European Journal of Operational Research, 2006, 171(1): 1- 23.
[4] 孫奇. AGV系統路徑規劃技術研究[D]. 浙江: 浙江大學, 2012.
[5] 張凌燕, 溫慶城, 張志文. 神經系統與內分泌系統的相互影響與協同作用[J]. 生物學通報, 2006, 41(7): 24- 25.
[6] Zheng K, Tang D, Gu W, etal. Distributed control of multi-AGV system based on regional control model. Production Engineering Research and Development[J], 2013, (7):433-441.
[7] Farhy L S. Modeling of oscillations in endocrine networks with feedback [J]. Methods in enzymology, 2004, 384: 54-81.


收稿日期:2014-01-13
中圖分類號:TP183
文獻標志碼:A
文章編號:1671-5276(2015)04-0112-04
作者簡介:唐敦兵(1972-),男,湖北仙桃人,教授,博士,研究方向為智能制造。
基金項目:國家自然科學基金資助項目(51175262);江蘇省杰出青年基金(BK2012010111);江蘇省產學研基金(BY201220116)
