斗輪堆取料機(jī)動(dòng)態(tài)仿真分析
2016-01-29 03:51:55黃強(qiáng)張文超
機(jī)械制造與自動(dòng)化 2015年4期
黃強(qiáng),張文超
(泰富重裝集團(tuán), 湖南 長(zhǎng)沙 410000)
斗輪堆取料機(jī)動(dòng)態(tài)仿真分析
黃強(qiáng),張文超
(泰富重裝集團(tuán), 湖南 長(zhǎng)沙 410000)
摘要:以斗輪堆取料機(jī)為研究對(duì)象,建立堆取料機(jī)虛擬樣機(jī)模型,進(jìn)行車輪組動(dòng)態(tài)受力計(jì)算,分析油缸和拉桿在俯仰工況的動(dòng)態(tài)變化。結(jié)果表明,采用動(dòng)態(tài)仿真分析是一種有效方法,為斗輪堆取料機(jī)的整體設(shè)計(jì)和實(shí)驗(yàn)提供較重要的參考數(shù)據(jù)。
關(guān)鍵詞:堆取料機(jī);虛擬樣機(jī);動(dòng)態(tài)分析
Dynamic Simulation Analysis for Bucket Wheel Stacker/ Reclaimer
HUANG Qing,ZHANG Wenchao
(Technology Research Institute of TIDFORE Group Changsha 410000, China)
Abstract:This paper takes the bucket wheel stacker-reclaimer as obiect of study to establish its virtual prototype model for its dynamic loading calculation and a series of the dynamic analyses on the oil cylinder and draw bar. The analytic and applied results show that the dynamics analysis method is a effective method, and it provides the important reference data for reasonable design and experiment of the stacker-reclaimer.
Keywords:stacker-reclaimer; virtual prototype ;dynamics analysis
0引言
斗輪堆取料機(jī)廣泛用于大型散貨港口、火力發(fā)電廠的儲(chǔ)煤場(chǎng)、大型鋼鐵公司礦石原料廠和大型水泥廠等。堆取料機(jī)是一種連續(xù)高效的散貨料場(chǎng)設(shè)備,實(shí)現(xiàn)煤炭、鐵礦石、石灰等散狀物料的堆、取連續(xù)作業(yè),成為散料存儲(chǔ)、轉(zhuǎn)運(yùn)等工藝環(huán)節(jié)中不可缺少的重要組成部分。斗輪堆取料機(jī)俯仰和回轉(zhuǎn)機(jī)構(gòu)的結(jié)構(gòu)形式多樣,傳統(tǒng)的理論計(jì)算方法較為復(fù)雜。斗輪堆取料機(jī)是一個(gè)典型的多剛體系統(tǒng),利用多剛體動(dòng)力學(xué)理論建立虛擬樣機(jī)模型,進(jìn)行整機(jī)穩(wěn)定性和運(yùn)動(dòng)特性分析更加直觀、有效,同時(shí)有利于提高整機(jī)的可靠性和穩(wěn)定性。
1虛擬樣機(jī)模型的建立
1.1整機(jī)結(jié)構(gòu)簡(jiǎn)化
以行走機(jī)構(gòu)車輪底端水平線為x軸,回轉(zhuǎn)平臺(tái)中心線為y軸,斗輪機(jī)構(gòu)的簡(jiǎn)化模型如圖1所示。整機(jī)結(jié)構(gòu)主要由斗輪、臂架、皮帶機(jī)、司機(jī)室、上部機(jī)構(gòu)、俯仰機(jī)構(gòu)、走行機(jī)構(gòu)、門座、回轉(zhuǎn)機(jī)構(gòu)、回轉(zhuǎn)平臺(tái)等構(gòu)成。斗輪堆取料機(jī)通過(guò)連接臂架和回轉(zhuǎn)平臺(tái)的液壓油缸,實(shí)現(xiàn)臂架、上部機(jī)構(gòu)高度變化,同時(shí)通過(guò)行走和回轉(zhuǎn)機(jī)構(gòu)實(shí)現(xiàn)沿料場(chǎng)方向不同方式的堆取料作業(yè)[1]。

圖1 斗輪堆取料機(jī)簡(jiǎn)化模型
1.2虛擬樣機(jī)模型
由于固定式尾車結(jié)構(gòu)與地面輸送帶相連,不影響整機(jī)回轉(zhuǎn)和俯仰的運(yùn)動(dòng)特性,因此對(duì)堆取料機(jī)整機(jī)結(jié)構(gòu)模型簡(jiǎn)化,忽略尾車結(jié)構(gòu),建立虛擬樣機(jī)模型。虛擬樣機(jī)模型如圖2所示,臂架、上部機(jī)構(gòu)、走行機(jī)構(gòu)、門座、回轉(zhuǎn)機(jī)構(gòu)、回轉(zhuǎn)平臺(tái)等的變形量較小,設(shè)置為多剛體模型;拉桿為離散柔性beam單元,梁截面的形狀與拉桿結(jié)構(gòu)形狀保持一致;斗輪、皮帶機(jī)、司機(jī)室、物料、配重設(shè)置質(zhì)量塊屬性。各構(gòu)件的物理屬性與各構(gòu)件實(shí)際模型保持一致。此外,為了更為真實(shí)地仿真實(shí)際車輪支反力,車輪與導(dǎo)軌之間建立Bushing柔性連接[2],Bushing連接作用如公式1所示。參數(shù)設(shè)置如表1所示。
Fj=-Fi,Tj=-Ti-δFi
(1)
式中:F——連接作用力;T——連接力矩;δ——j標(biāo)記點(diǎn)相對(duì)i標(biāo)記點(diǎn)的瞬時(shí)變形矢量。
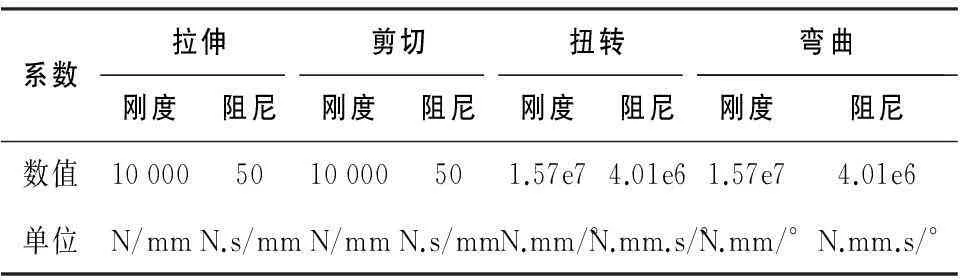
表1 Bushing連接參數(shù)設(shè)置
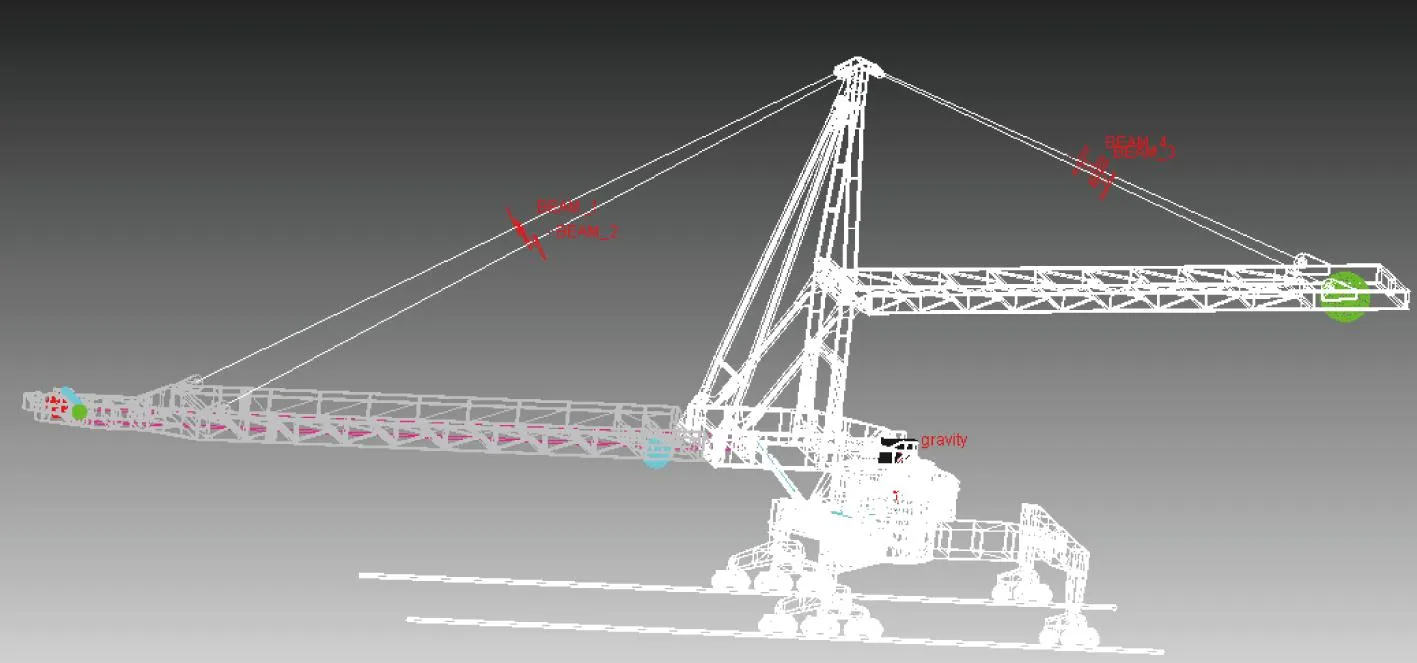
圖2 虛擬樣機(jī)模型
2約束及加載處理
2.1虛擬樣機(jī)的約束
堆取料機(jī)虛擬樣機(jī)系統(tǒng)各部件約束關(guān)系在創(chuàng)建的標(biāo)記點(diǎn)處直接定義,各主要部件之間的約束關(guān)系由表2所示[3]。

表2 虛擬樣機(jī)各部件之間約束關(guān)系
2.2虛擬樣機(jī)的加載
堆取料機(jī)主要通過(guò)俯仰和回轉(zhuǎn)運(yùn)動(dòng)進(jìn)行分層取料和堆料,因此虛擬樣機(jī)整體模型,其動(dòng)態(tài)仿真主要考慮整機(jī)的俯仰和回轉(zhuǎn)工況,在此工況下,整機(jī)處于帶載狀態(tài)(即包括鋼結(jié)構(gòu)自重,物料載荷和積垢載荷)。
整機(jī)模型臂架和上部結(jié)構(gòu)在回轉(zhuǎn)驅(qū)動(dòng)的作用下,以0.5°/s轉(zhuǎn)速由初始位置向右勻速回轉(zhuǎn),達(dá)到回轉(zhuǎn)最大角度,經(jīng)過(guò)10s運(yùn)動(dòng)后,反方向回轉(zhuǎn),完成整機(jī)的回轉(zhuǎn)運(yùn)動(dòng)。回轉(zhuǎn)驅(qū)動(dòng)由階躍函數(shù)STEP來(lái)定義。V=STEP( time, 0, 0.5, 215, 0.5 )+STEP( time , 215, 0, 225, -1 )+STEP( time , 225, 0 , 660 , 0 ),隨時(shí)間變化回轉(zhuǎn)驅(qū)動(dòng)速度如圖3所示。整體上部結(jié)構(gòu)俯仰角度范圍為-10.5°~11°,油缸伸縮位移時(shí)間如圖4所示。
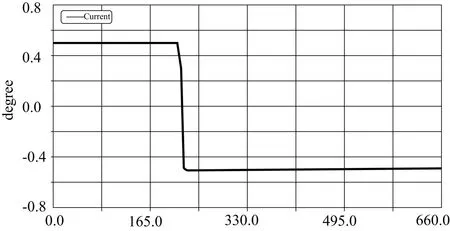
圖3 回轉(zhuǎn)速度曲線圖
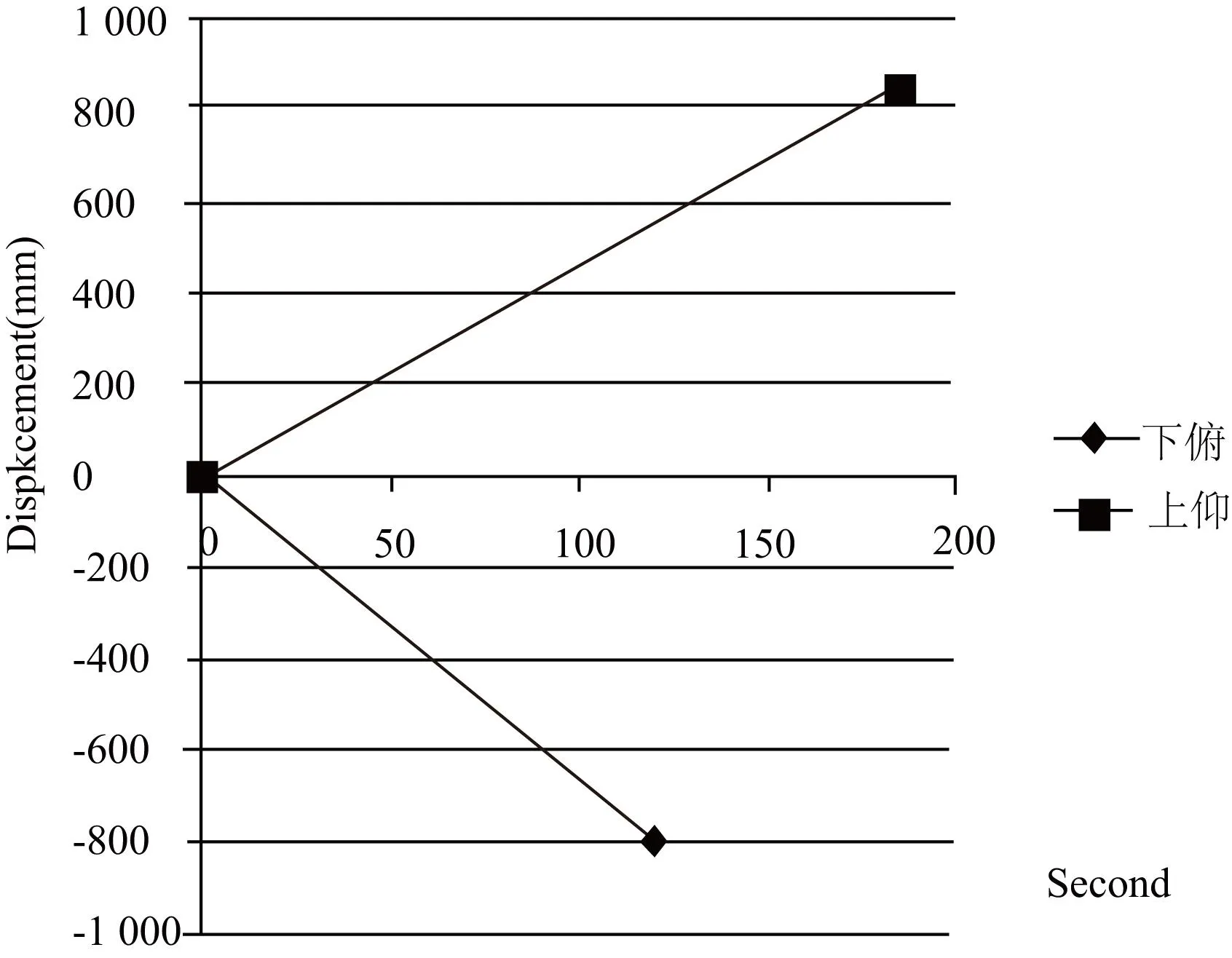
圖4 俯仰機(jī)構(gòu)位移時(shí)間簡(jiǎn)圖
3動(dòng)態(tài)仿真分析
3.1車輪組反力
堆取料機(jī)整機(jī)的穩(wěn)定性通過(guò)車輪組的支反力來(lái)反映。車輪支反力為正值,表示車輪承壓,未脫離導(dǎo)軌;支反力為負(fù)值時(shí),表示車輪騰空。在回轉(zhuǎn)工況下,整機(jī)重心與傾翻線垂直距離最短時(shí),整機(jī)最容易發(fā)生傾翻。為避免車輪支點(diǎn)連線而引起堆取料機(jī)失穩(wěn),對(duì)車輪組反力動(dòng)態(tài)變化進(jìn)行分析。對(duì)行走機(jī)構(gòu)車輪組進(jìn)行標(biāo)號(hào),如圖5所示。為了避免堆取料機(jī)車輪與導(dǎo)軌的初始碰撞, 首先進(jìn)行靜平衡分析,再進(jìn)行動(dòng)態(tài)仿真分析。由圖3回轉(zhuǎn)速度曲線所示,整機(jī)回轉(zhuǎn)時(shí)間設(shè)置為670s,時(shí)間步長(zhǎng)為0.01。

圖5 走行車輪編號(hào)示意圖
如圖6所示,初始0s時(shí),整機(jī)處于靜平衡狀態(tài)。在堆取料機(jī)本身重力的作用下,整機(jī)配重平衡,前端和后端車輪組承受反力130000N左右,堆取料面左側(cè)車輪的反力比右側(cè)車輪組小10000N左右。隨著臂架和整體上部結(jié)構(gòu)逆時(shí)針?lè)较蚧剞D(zhuǎn),上部結(jié)構(gòu)重心左移,如圖6(a)所示。前端右側(cè)車輪組車輪反力逐漸增大,而右側(cè)車輪組車輪反力逐漸減小,如圖6(c)和6(d)所示。220s時(shí),逆時(shí)針回轉(zhuǎn)角度達(dá)到最大,此時(shí)車輪組反力成為拐點(diǎn),如圖6(b)和6(d)所示,后端左側(cè)車輪組車輪反力達(dá)到136000N左右,右側(cè)車輪組車輪反力降低到120000N左右。440s時(shí),臂架回轉(zhuǎn)至整機(jī)平衡位置,如圖6所示,0~440s內(nèi),整機(jī)車輪支反力以220s時(shí)間點(diǎn)對(duì)稱顯示。整機(jī)沿平衡繼續(xù)順時(shí)針?lè)较蛐D(zhuǎn),臂架和上部結(jié)構(gòu)重心右側(cè)偏移,右側(cè)車輪組反力增大,左側(cè)車輪組反力減少。660s時(shí),逆時(shí)針回轉(zhuǎn)角度達(dá)到最大。整機(jī)在回轉(zhuǎn)過(guò)程中,車輪反力均未脫離導(dǎo)軌,且最大車輪反力228000N,小于設(shè)計(jì)載荷輪壓250000N,整機(jī)處于穩(wěn)定狀態(tài)。
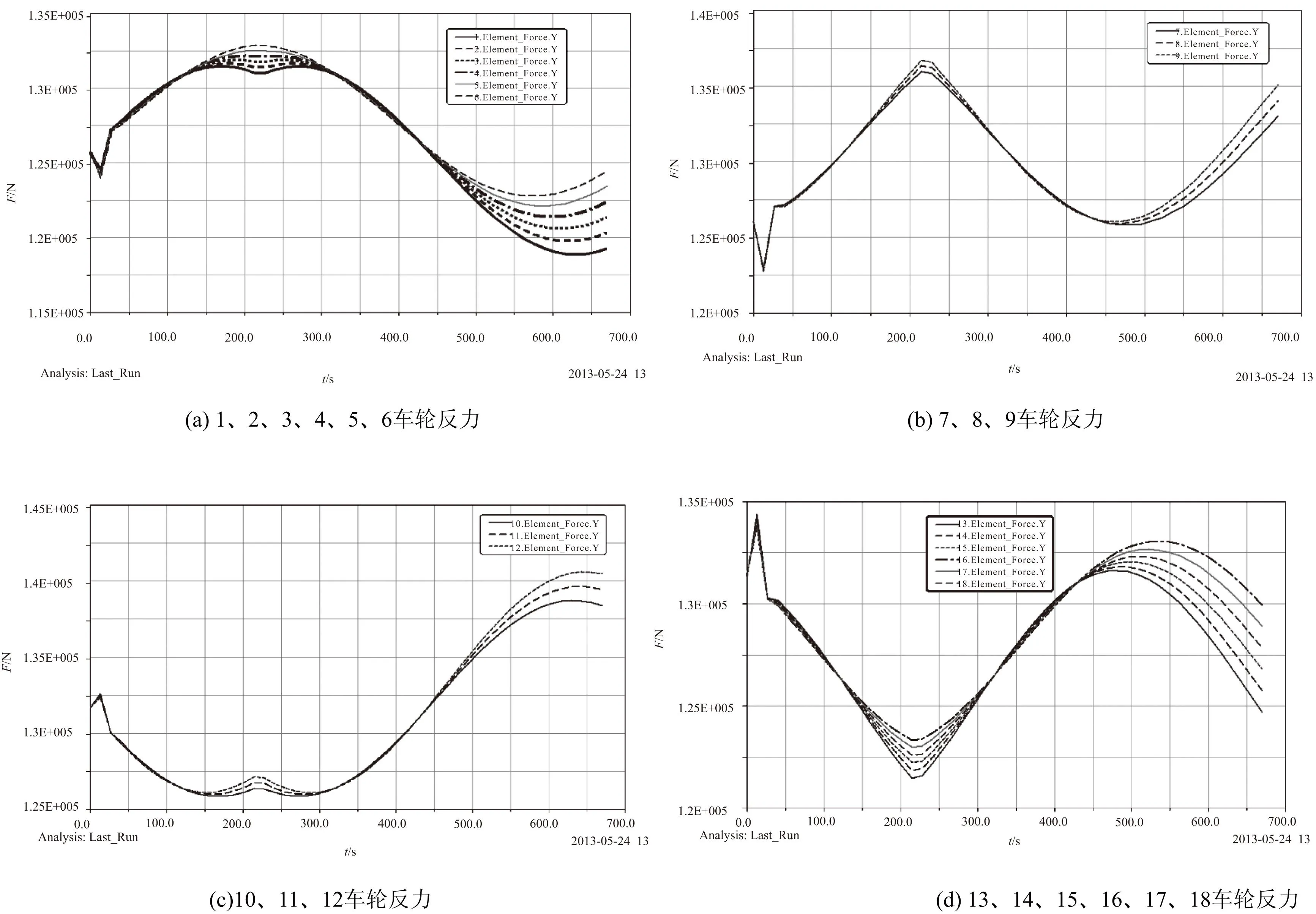
圖6 車輪支反力曲線
3.2俯仰動(dòng)態(tài)分析
堆取料機(jī)由上部結(jié)構(gòu)和回轉(zhuǎn)平臺(tái)連接的伸縮油缸實(shí)現(xiàn)整個(gè)上部結(jié)構(gòu)繞支撐鉸點(diǎn)進(jìn)行俯仰運(yùn)動(dòng)。俯仰機(jī)構(gòu)運(yùn)動(dòng)如圖7所示,AC代表上部結(jié)構(gòu)部分,繞變幅鉸點(diǎn)C的剛體沿平面的定軸轉(zhuǎn)動(dòng),AB代表伸縮油缸部分,活塞桿簡(jiǎn)化為滑塊線移動(dòng)[4]。油缸伸縮帶動(dòng)整體結(jié)構(gòu)的俯仰完成堆取料工況,平面機(jī)構(gòu)的自由度數(shù)1,即油缸的伸縮自由度。
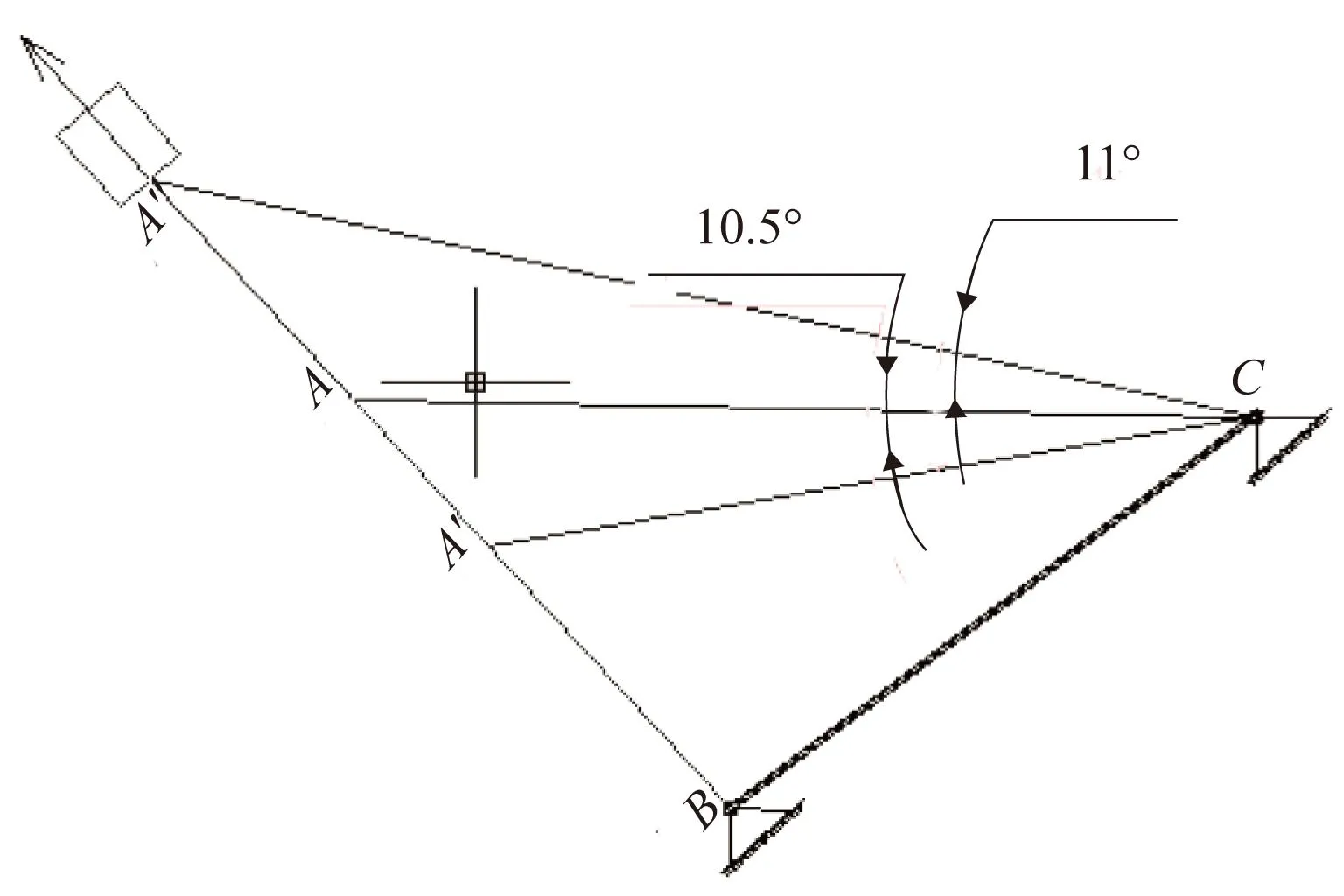
圖7 俯仰機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖
如圖8所示,油缸力在靜平衡的作用下,油缸受壓為-45400N。位移時(shí)間如圖4所示。上仰時(shí),支撐油缸的作用下,整機(jī)的上仰時(shí)重心的發(fā)生改變,向后偏移。油缸由受壓轉(zhuǎn)變?yōu)槭芾瓲顟B(tài),最大達(dá)到146000N。下俯時(shí),整機(jī)重心向前偏移,油缸一直在受壓狀態(tài),并且逐漸增大到-320000N。

圖8 俯仰機(jī)構(gòu)油缸力曲線
堆取料機(jī)俯仰取料時(shí),如圖9所示,隨著油缸的伸縮,臂架進(jìn)行俯仰時(shí),經(jīng)過(guò)1.5s后的振蕩后,拉桿軸向力同時(shí)趨于平衡。拉桿的軸向力基本保持不變,前端臂架拉桿和后端配重拉桿軸向力分別為406000 N和1050000N,俯仰角度的變化對(duì)拉桿軸向力并不敏感。
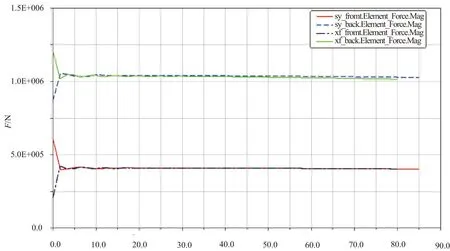
圖9 拉桿軸向力曲線
堆取料機(jī)俯仰工況時(shí),在俯仰角度范圍內(nèi),如圖10所示,上部結(jié)構(gòu)的初始角速度為0.00061 rad/s(0.035°/s)。經(jīng)過(guò)30s的角速度緩慢的振蕩,整體趨于平衡,俯仰的角速度基本穩(wěn)定于0.0023 rad/s(0.13°/s)。下俯的振蕩幅度和頻率明顯高于上仰的振蕩幅度和頻率,因此下俯工況角速度的變化相對(duì)上仰工況變化更敏感。
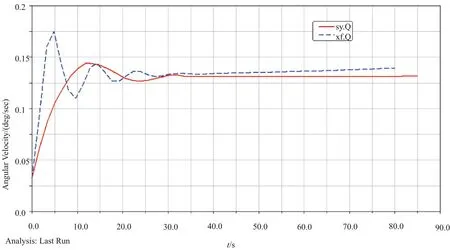
圖10 上部結(jié)構(gòu)角速度曲線
3.3樣機(jī)試制與測(cè)試
經(jīng)過(guò)虛擬樣機(jī)運(yùn)動(dòng)仿真分析,物理樣機(jī)試制如圖11所示。 在回轉(zhuǎn)工況下,采用靜態(tài)測(cè)量系統(tǒng),荷重傳感器-應(yīng)變儀,對(duì)試制樣機(jī)10號(hào)車輪進(jìn)行輪壓測(cè)試。荷重傳感器使用前進(jìn)行標(biāo)定,傳感器置于千斤頂上,距10號(hào)車輪500mm使用千斤頂加載,使車輪脫離軌面。與虛擬樣機(jī)模型對(duì)比分析,測(cè)試選擇整機(jī)回轉(zhuǎn)0°、30°、60°、75°、90°、110°。如圖12所示,測(cè)試數(shù)據(jù)在0°角時(shí)為138400N,仿真數(shù)據(jù)為131000N,兩者相差最大為740N。試制與虛擬樣機(jī)相對(duì)誤差在5%以下,因此整機(jī)虛擬樣機(jī)模型是可靠的。

圖11 物理樣機(jī)
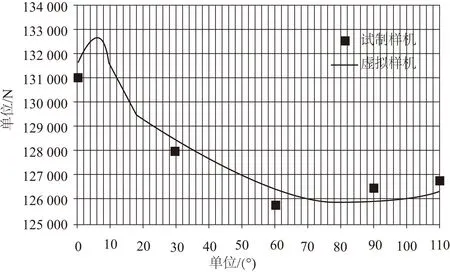
圖12 10號(hào)輪壓對(duì)比圖
4結(jié)論
1) 建立了簡(jiǎn)化的斗輪堆取料機(jī)的虛擬樣機(jī)模型。在模型中采用Bushing(軸套力)柔性連接,建立車輪與導(dǎo)軌等效接觸,與實(shí)際了結(jié)構(gòu)比較接近;同時(shí)各主要部件約束關(guān)系參照連接關(guān)系。通過(guò)測(cè)試輪壓對(duì)比,驗(yàn)證虛擬樣機(jī)模型的準(zhǔn)確可靠性。
2) 堆取料機(jī)俯仰和回轉(zhuǎn)工況的動(dòng)態(tài)仿真分析可為斗整機(jī)的設(shè)計(jì)和實(shí)驗(yàn)提供參考數(shù)據(jù),如提取油缸和拉桿的動(dòng)態(tài)力,為液壓油缸的選型和拉桿的截面設(shè)計(jì)提供依據(jù),同時(shí)為整機(jī)的穩(wěn)定性提供計(jì)算依據(jù),避免整機(jī)發(fā)生傾覆。
參考文獻(xiàn):
[1] 邵明亮,于國(guó)飛,耿 華,等. 斗輪堆取料機(jī)[M] . 北京:化學(xué)工業(yè)出版社,2005.
[2] (美)MSC.Software著. MSC. ADAMS/View高級(jí)培訓(xùn)教程[M]. 邢俊文. 陶永忠譯. 北京:清華大學(xué)出版社,2004.
[3] 屈福政,劉海濤. 履帶起重機(jī)臂架后傾動(dòng)力學(xué)仿真[J]. 起重運(yùn)輸機(jī)械,2005,(12):40-43.
[4] 徐萬(wàn)鑫,于寶財(cái). 基于動(dòng)力學(xué)臂式斗輪機(jī)俯仰機(jī)構(gòu)分析及平衡回路選用[J]. 機(jī)械工程師,2012,(2):136-138.


收稿日期:2014-01-10
中圖分類號(hào):Tp48;TP391.9
文獻(xiàn)標(biāo)志碼:B
文章編號(hào):1671-5276(2015)04-0138-04
作者簡(jiǎn)介:黃強(qiáng)(1978-),男,湖南長(zhǎng)沙人,碩士,主要研究方向?yàn)闄C(jī)械設(shè)計(jì)。
