一種關(guān)節(jié)式輪履混合機(jī)器人的設(shè)計(jì)與運(yùn)動(dòng)分析
2016-01-29 03:51:59呂海洋費(fèi)燕瓊宋立博
機(jī)械制造與自動(dòng)化 2015年4期
呂海洋,費(fèi)燕瓊,宋立博
(上海交通大學(xué) a. 機(jī)器人研究所, b. 工程訓(xùn)練中心, 上海 200240)
一種關(guān)節(jié)式輪履混合機(jī)器人的設(shè)計(jì)與運(yùn)動(dòng)分析
呂海洋a,費(fèi)燕瓊a,宋立博b
(上海交通大學(xué) a. 機(jī)器人研究所, b. 工程訓(xùn)練中心, 上海 200240)
摘要:針對(duì)移動(dòng)機(jī)器人在發(fā)展中存在的問題,綜合輪式、履帶式等不同移動(dòng)機(jī)構(gòu)的特點(diǎn),設(shè)計(jì)了一種關(guān)節(jié)式輪履混合機(jī)器人,詳細(xì)分析了其機(jī)械結(jié)構(gòu)。該機(jī)器人具有多種運(yùn)動(dòng)模式,根據(jù)運(yùn)動(dòng)環(huán)境的不同,可以在純輪式運(yùn)動(dòng)與純履帶式運(yùn)動(dòng)間切換。基于齊次坐標(biāo)變換矩陣分析了機(jī)器人的質(zhì)心穩(wěn)定性與越障性能,建立了其質(zhì)心方程與越障方程。實(shí)驗(yàn)證明,這種機(jī)器人能夠充分發(fā)揮輪式運(yùn)動(dòng)與履帶運(yùn)動(dòng)的優(yōu)點(diǎn),機(jī)動(dòng)靈活,速度快,并且具有很強(qiáng)的地形適應(yīng)能力和越障能力。
關(guān)鍵詞:輪履混合機(jī)器人;移動(dòng)機(jī)構(gòu);越障性能
Design and Motion Analysis of One Articulated Wheel-track Hybrid Mobile Robot
LV Haiyanga, FEI Yanqionga, SONG Libob
(a. Institute of Robotics, Shanghai Jiaotong University,
b. Engineering Traning Center, Shanghai 200240, China)
Abstract:This paper designs a kind of wheel-track hybrid robot according to the problems existing in the development of mobile robot and respective performance of different moving mechanism. The robot moves in many patterns according to different moving environment, that it can move in pure wheel pattern or pure track pattern. It also analyzes the gravity stability and obstacle performance based on the homogeneous coordinate transformation matrix and establishes its gravity equation and obstacle climbing equation. Experiments show that this robot can fully exert the advantages of wheel mechanism and track mechanism and is equipped with a good obstacle climbing capability.
Keywords:wheel-track hybrid robot; moving mechanism; obstacle performance
0引言
移動(dòng)機(jī)器人在偵察、巡視、警戒、掃雷等危險(xiǎn)、惡劣環(huán)境中有著廣闊的應(yīng)用前景。機(jī)器人的移動(dòng)機(jī)構(gòu)主要有三種類型:輪式機(jī)構(gòu)、履帶式機(jī)構(gòu)和腿式機(jī)構(gòu)。
輪式機(jī)器人機(jī)械結(jié)構(gòu)簡(jiǎn)單、能耗低、機(jī)動(dòng)靈活、能夠達(dá)到很高的移動(dòng)速度,但其在濕滑、松軟路面易打滑,地形適應(yīng)能力與越障能力差[1]。典型的輪式機(jī)器人有卡內(nèi)基梅隆大學(xué)研制的Nomad極地探險(xiǎn)車[2],Songyi Dian, Tao Liu等人研制的新型Shrimp機(jī)器人[3]。履帶機(jī)器人支撐面積大,牽引附著性能好,擁有較高的越障能力和良好的環(huán)境適應(yīng)性,但其能耗高,效率低,速度相對(duì)較慢。典型的履帶機(jī)器人有著名的“手推車”(Wheelbarrow)排爆機(jī)器人[4],能夠獨(dú)立進(jìn)入戰(zhàn)場(chǎng)與敵人作戰(zhàn)的VIPER[5],德國研發(fā)的模塊化排爆機(jī)器人ASENDRO[6]。腿式機(jī)器人雖能夠滿足某些特殊的性能要求,適應(yīng)復(fù)雜的地形,但機(jī)構(gòu)過于復(fù)雜,要實(shí)現(xiàn)穩(wěn)定高速的行走還有諸多難題需要解決。典型的腿式機(jī)器人如加州大學(xué)伯克利分校研制的DynaRoACH六足機(jī)器人[7],Zhiying Wang、Xilun Ding等人研制的圓形徑向?qū)ΨQ六足機(jī)器人[8]。
盡管移動(dòng)機(jī)器人在相當(dāng)多的領(lǐng)域擁有很好的發(fā)展前景,但也存在許多問題,如:1) 機(jī)器人執(zhí)行任務(wù)時(shí)多處于非結(jié)構(gòu)化環(huán)境中,地形復(fù)雜多變,其自身穩(wěn)定性和環(huán)境適應(yīng)能力需進(jìn)一步提升;2) 履帶機(jī)器人結(jié)構(gòu)較為復(fù)雜,質(zhì)量大,移動(dòng)速度慢,靈活性有待提高;3) 履帶機(jī)器人運(yùn)行時(shí)與路面存在較大的摩擦阻力,能耗高,在長距離運(yùn)行時(shí)尤為明顯,提高其行駛效率至關(guān)重要[9]。
基于移動(dòng)機(jī)器人存在的問題和不同結(jié)構(gòu)移動(dòng)機(jī)器人在性能上的差異,文中提出一種新穎的關(guān)節(jié)式輪履混合機(jī)器人,可以實(shí)現(xiàn)純輪式運(yùn)動(dòng)與純履帶式運(yùn)動(dòng)。在遠(yuǎn)距離平坦路面時(shí),機(jī)器人只依靠輪子運(yùn)動(dòng),充分發(fā)揮輪式機(jī)構(gòu)速度快、能耗低、機(jī)動(dòng)靈活的優(yōu)點(diǎn);而在野外、草叢等不平坦路面,機(jī)器人只依靠履帶運(yùn)動(dòng),充分發(fā)揮履帶機(jī)構(gòu)地形適應(yīng)能力強(qiáng),擁有較高越障能力的優(yōu)點(diǎn)。
1機(jī)器人結(jié)構(gòu)設(shè)計(jì)
1.1總體結(jié)構(gòu)(圖1)
移動(dòng)機(jī)器人前后左右均對(duì)稱,沒有車頭和車尾的區(qū)別,在進(jìn)入狹小的通道時(shí),不需要擔(dān)心掉頭的問題,越障時(shí),機(jī)器人也不需要調(diào)整車體的方位,提高了運(yùn)行效率。高度的對(duì)稱性也大大提高了零件的互換性。
移動(dòng)機(jī)器人的2個(gè)驅(qū)動(dòng)車輪配置在車體的中部,2個(gè)導(dǎo)向輪分別位于車體的前部和后部。當(dāng)機(jī)器人處于輪式運(yùn)動(dòng)時(shí),4個(gè)車輪著地,由中部的2個(gè)驅(qū)動(dòng)輪驅(qū)動(dòng)。4條履帶擺臂完全相同,履帶擺臂機(jī)構(gòu)不僅能夠驅(qū)動(dòng)履帶旋轉(zhuǎn),也能夠繞驅(qū)動(dòng)帶輪的輪心軸線擺動(dòng)。通過履帶臂的擺動(dòng),機(jī)器人可以實(shí)現(xiàn)履帶運(yùn)動(dòng)和輪式運(yùn)動(dòng)的切換:履帶擺臂下擺時(shí)可將車體抬起,此時(shí)擺臂與地面貼合,輪子離地,機(jī)器人通過履帶運(yùn)行,實(shí)現(xiàn)純履帶運(yùn)動(dòng);履帶擺臂上擺時(shí),機(jī)器人輪子著地,此時(shí)則依靠輪子驅(qū)動(dòng),實(shí)現(xiàn)純輪式運(yùn)動(dòng)。履帶擺臂的中間為中部車體,它是移動(dòng)機(jī)器人的骨架,主要安裝移動(dòng)機(jī)器人的驅(qū)動(dòng)裝置嵌入式控制系統(tǒng)電池傳感器及其他必要裝置。

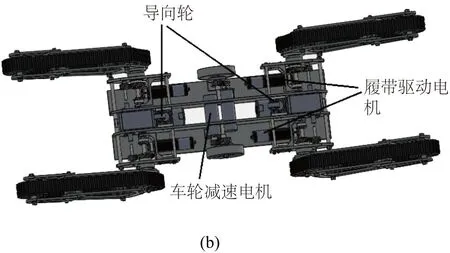
圖1 機(jī)器人整體結(jié)構(gòu)
1.2動(dòng)力傳遞系統(tǒng)
(1)金融服務(wù)與城鎮(zhèn)化進(jìn)程不相匹配。社會(huì)主義的國家性質(zhì)與當(dāng)前的基本國情決定了需要有效整合社會(huì)資本與資源保障民生。貴陽市城鎮(zhèn)化發(fā)展過程中,需要將教育、醫(yī)療、衛(wèi)生、失業(yè)、養(yǎng)老等基礎(chǔ)保障項(xiàng)目列為重點(diǎn),構(gòu)建規(guī)范性的城鎮(zhèn)住房保障體系,容納更多的城鎮(zhèn)人口。但在實(shí)際過程中因政策解讀與操作不到位、資金資源分配失衡等問題,不能有效解決貴陽市城鎮(zhèn)化過程中出現(xiàn)的民生問題。
機(jī)器人的動(dòng)力傳動(dòng)系統(tǒng)如圖2所示,共有8個(gè)自由度。車輪部分有2個(gè)自由度,由中部的2個(gè)直流電機(jī)經(jīng)一對(duì)末級(jí)直齒減速齒輪驅(qū)動(dòng),可實(shí)現(xiàn)高速運(yùn)動(dòng)。末級(jí)直齒減速齒輪主要是為了電機(jī)的合理布置;4條履帶擺臂對(duì)履帶的旋轉(zhuǎn)驅(qū)動(dòng)共有4個(gè)自由度,這主要是考慮到履帶運(yùn)動(dòng)的阻力大、要在較差的路況下運(yùn)動(dòng);履帶臂的擺動(dòng)共有2個(gè)自由度,由2個(gè)直流電機(jī)經(jīng)蝸桿渦輪減速器驅(qū)動(dòng),從圖2中可以看出位于同側(cè)的2個(gè)履帶擺臂由同一電機(jī)驅(qū)動(dòng)。采用蝸桿渦輪減速器是為了實(shí)現(xiàn)擺臂的自鎖,履帶擺臂可360°擺動(dòng),有助于機(jī)器人在越障過程中實(shí)現(xiàn)豐富的運(yùn)動(dòng)姿態(tài)變化。從圖2中也可以看出,移動(dòng)機(jī)器人的驅(qū)動(dòng)電機(jī)布置緊湊,車體空間的利用率較高,整個(gè)車體的質(zhì)量得到了均勻、合理的分配。

圖2 移動(dòng)機(jī)器人動(dòng)力傳遞圖
1.3履帶臂驅(qū)動(dòng)裝置
履帶擺臂機(jī)構(gòu)不僅能驅(qū)動(dòng)履帶旋轉(zhuǎn),也能實(shí)現(xiàn)擺動(dòng),這兩種不同的運(yùn)動(dòng)都要繞驅(qū)動(dòng)帶輪的輪心軸線旋轉(zhuǎn)實(shí)現(xiàn)。為此設(shè)計(jì)了圖3所示的履帶臂驅(qū)動(dòng)裝置來實(shí)現(xiàn)這兩股動(dòng)力的傳遞。圖3中的減速電機(jī)用來驅(qū)動(dòng)履帶旋轉(zhuǎn),它固定在內(nèi)支板上,通過一對(duì)錐齒輪將動(dòng)力傳到內(nèi)軸上。采用錐齒輪是為了讓減速電機(jī)沿車體縱向布置,避免與蝸桿渦輪電機(jī)干涉,并充分利用空間。內(nèi)軸通過鍵與驅(qū)動(dòng)帶輪相聯(lián),使履帶實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng),其軸承座位于內(nèi)支板和外軸上。小軸與蝸桿渦輪電機(jī)通過剛性聯(lián)軸器相連,剛性聯(lián)軸器可保證同一蝸桿渦輪電機(jī)所驅(qū)動(dòng)的履帶擺臂是平齊的,小軸通過一對(duì)末級(jí)直齒減速齒輪將動(dòng)力傳到外軸上,減速齒輪一方面可將2個(gè)電機(jī)的驅(qū)動(dòng)中心軸錯(cuò)開,實(shí)現(xiàn)兩股動(dòng)力的傳遞,另一方面可以增大對(duì)履帶擺臂的驅(qū)動(dòng)力矩。

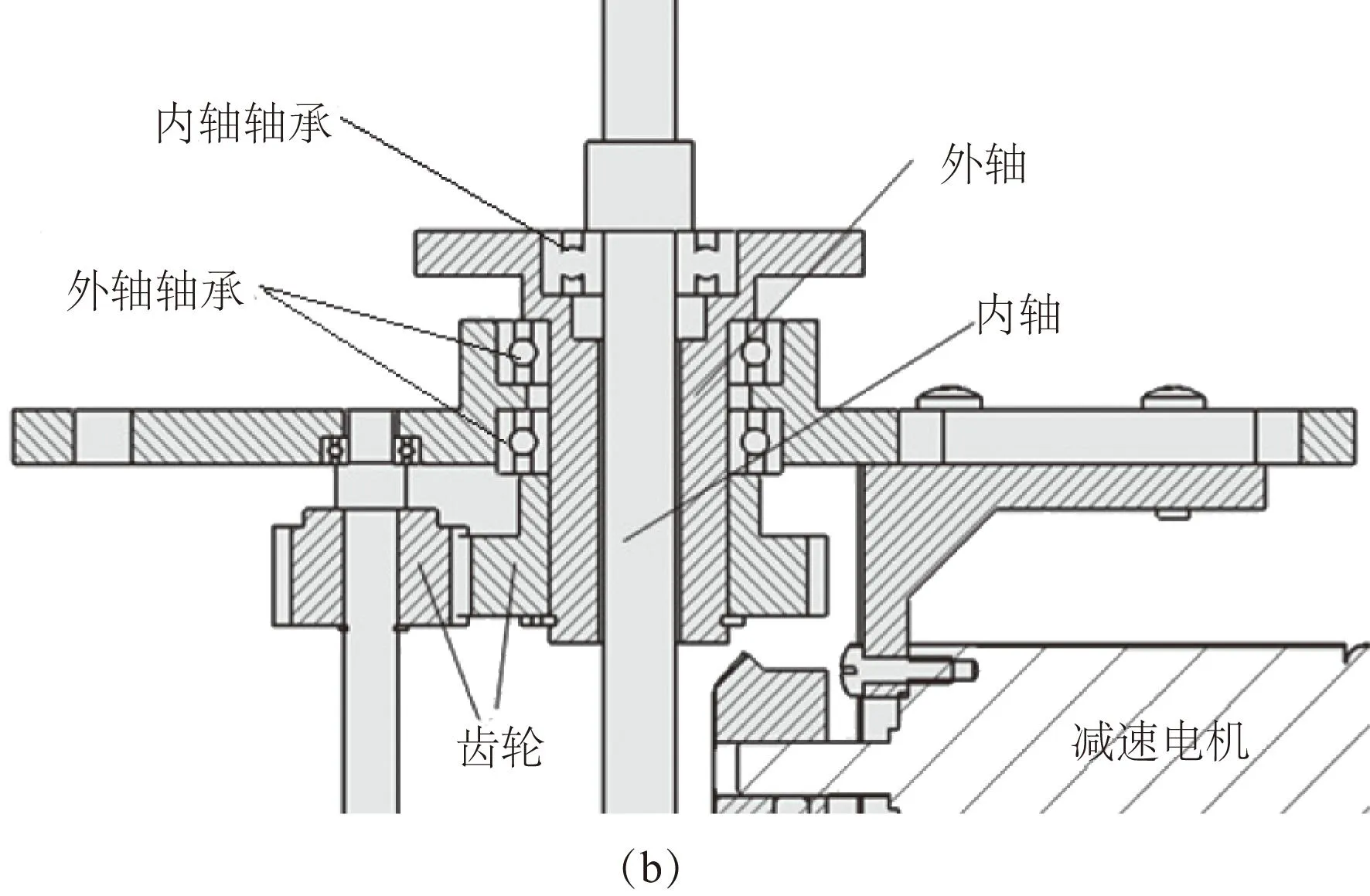
圖3 履帶擺臂驅(qū)動(dòng)裝置
1.4履帶臂結(jié)構(gòu)
履帶臂結(jié)構(gòu)如圖4所示。
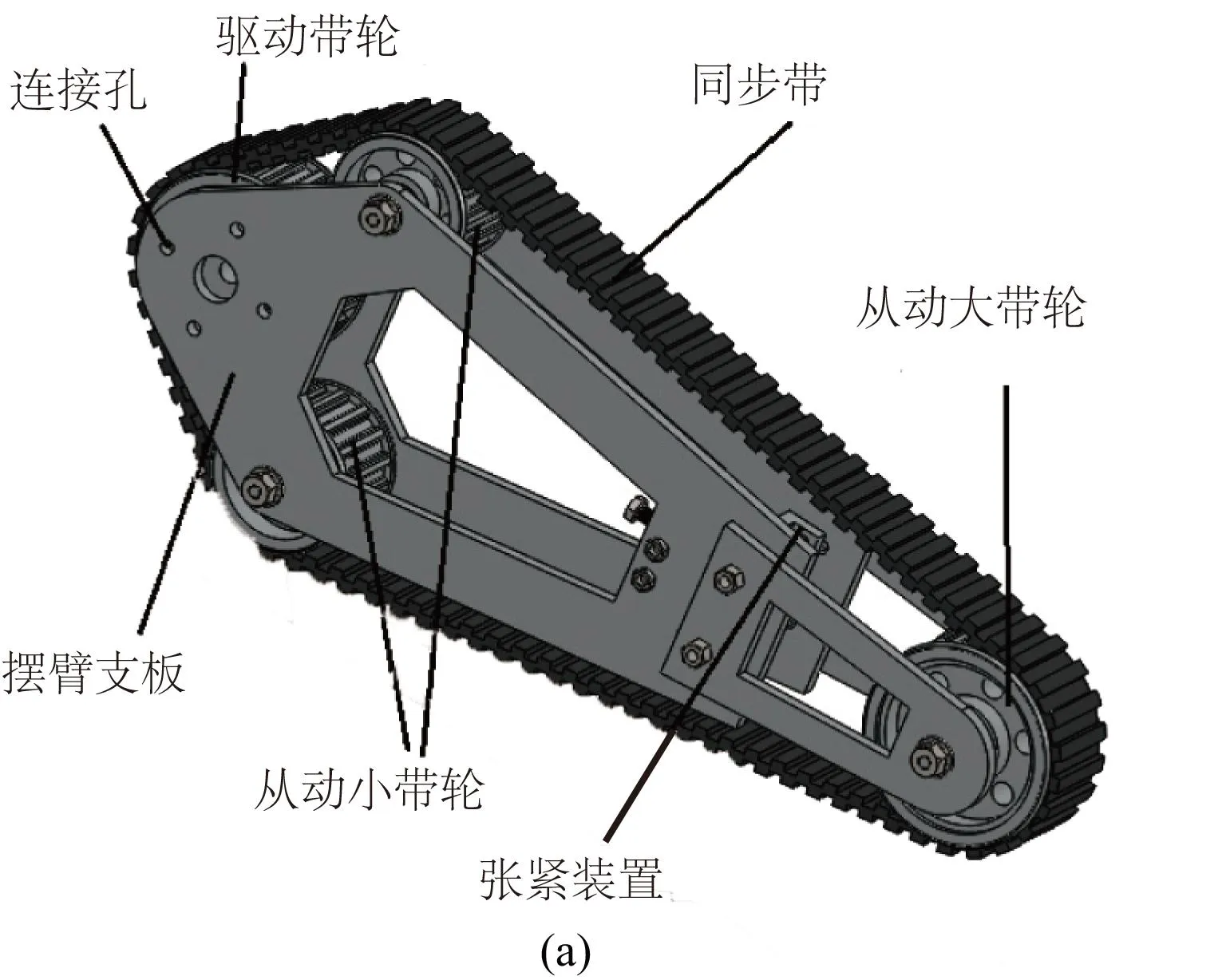

圖4 履帶擺臂結(jié)構(gòu)
為了使履帶下擺至與地面完全貼合時(shí),車輪能夠完全脫離地面,將履帶擺臂設(shè)計(jì)成對(duì)稱的四邊形結(jié)構(gòu),對(duì)稱性使得擺臂既能前擺亦可后擺。四邊形的4個(gè)頂點(diǎn)處各有一個(gè)帶輪,其中只有一個(gè)為驅(qū)動(dòng)輪,其他均為從動(dòng)輪。
在運(yùn)行過程中,尤其是越障時(shí),履帶與地面間可能會(huì)由面接觸轉(zhuǎn)變?yōu)榫€接觸,所以履帶上要有一定的張緊力。履帶臂上采用支撐輪,考慮到文中的履帶擺臂較長且兩條邊均可接地運(yùn)行,若添加支撐輪,其數(shù)量會(huì)很多,不僅會(huì)增大擺臂的質(zhì)量,也會(huì)極大增加機(jī)構(gòu)的復(fù)雜程度。所以選取張緊螺釘和張緊滑塊作為張緊裝置,通過旋轉(zhuǎn)張緊螺釘使得張緊滑塊在導(dǎo)槽中移動(dòng)實(shí)現(xiàn)張緊,最后由鎖緊螺栓固定。
2機(jī)器人運(yùn)動(dòng)模式
2.1輪式運(yùn)動(dòng)(圖5)

圖5 輪式運(yùn)動(dòng)
當(dāng)履帶擺臂舉起時(shí),機(jī)器人只有車輪著地,此時(shí)可實(shí)現(xiàn)純輪式運(yùn)動(dòng),擁有輪式移動(dòng)機(jī)構(gòu)的所有優(yōu)點(diǎn),適用于路況較好時(shí)。
2.2履帶運(yùn)動(dòng)
圖6(a)中為雙節(jié)式配置,圖6(b)中為三節(jié)式配置,此時(shí)機(jī)器人與地面接觸面積大,能夠適應(yīng)松軟、泥濘以及不平坦的路況,擁有履帶機(jī)構(gòu)的優(yōu)點(diǎn),主要適用于草叢、野外等路況差的情況。圖6(c)中運(yùn)動(dòng)模式類似腿式移動(dòng)機(jī)構(gòu),一方面能夠直接越過較低較窄的障礙物,另一方面增加了車體的凈空高度,對(duì)中部車體上搭載的某些傳感器會(huì)有幫助。

圖6 履帶運(yùn)動(dòng)
2.3典型越障過程
機(jī)器人履帶擺臂可360°擺動(dòng),機(jī)器人在越障過程中具備豐富的運(yùn)動(dòng)姿態(tài)變化,其典型的越障過程如圖7所示。

圖7 典型越障過程
3越障能力分析
3.1質(zhì)心
機(jī)器人質(zhì)心位置如圖8所示。

圖8 機(jī)器人質(zhì)心圖
在履帶擺臂的轉(zhuǎn)軸上建立笛卡爾坐標(biāo)系o1x1y1z1與o2x2y2z2,坐標(biāo)系o1x1y1z1固連到中部車體上,坐標(biāo)系o2x2y2z2固連到右側(cè)的履帶擺臂上。P1(x1,y1,z1)為中部車體的質(zhì)心,P2(x2,y2,z2)分別為前后履帶擺臂的質(zhì)心,P*(x*,y*,z*)為整個(gè)機(jī)器人的質(zhì)心。θ1、θ2分別為兩側(cè)履帶擺臂相對(duì)于中部車體的擺角,l為擺臂轉(zhuǎn)軸到擺臂質(zhì)心點(diǎn)的距離,L為擺臂轉(zhuǎn)軸間的距離。機(jī)器人質(zhì)心點(diǎn)P*在坐標(biāo)系o1x1y1z1中的坐標(biāo)為:
(1)
M=(m1+2·m2)

假設(shè)固定右側(cè)擺臂,即保持θ2不變,由式(1)可得機(jī)器人質(zhì)心坐標(biāo)x*、y*的關(guān)系如下:
(2)
由式(2)可知,機(jī)器人的質(zhì)心位于半徑為m2·l/M的圓盤內(nèi),所以在滿足擺臂長度與承載能力的條件下,應(yīng)盡量減小擺臂質(zhì)量m2以及擺臂質(zhì)心到轉(zhuǎn)軸的距離l,以減小機(jī)器人質(zhì)心的變化范圍,提高運(yùn)動(dòng)的穩(wěn)定性。
3.2越障能力
機(jī)器人越障能力定義為其剛好能夠翻越的垂直障礙的高度,如圖9所示。翻越垂壁的前提是質(zhì)心鉛垂線在最大可能的直立過程中超越垂壁棱,以致機(jī)器人可沿垂壁棱翻轉(zhuǎn)[10]。
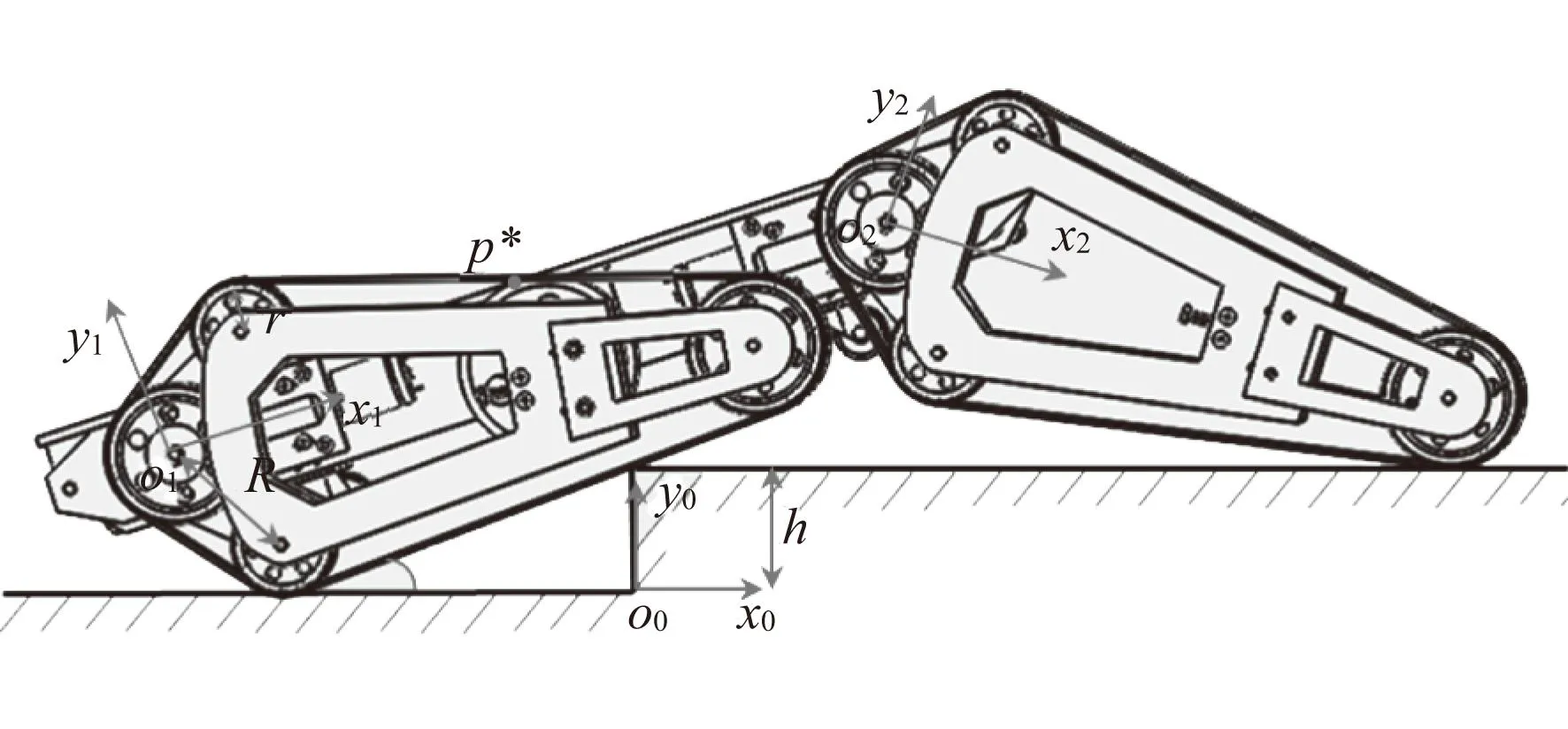
圖9 機(jī)器人越障圖
坐標(biāo)系o0x0y0z0為固定在地面上的基坐標(biāo)系,P*在基坐標(biāo)系中的坐標(biāo)為(x,y,z)。主動(dòng)輪輪心與小帶輪輪心的間距為R,小帶輪半徑為r,坐標(biāo)系o1x1y1z1相對(duì)于基坐標(biāo)系的轉(zhuǎn)角為θ。機(jī)器人在越障過程中有式(3)成立:
(3)
由式(3)可知機(jī)器人的幾何參數(shù)固定后,質(zhì)心點(diǎn)P*的坐標(biāo)為h與θ的函數(shù),即對(duì)應(yīng)于不同高度的障礙物,機(jī)器人越障時(shí)質(zhì)心在基坐標(biāo)系o0x0y0z0中會(huì)有不同的軌跡。取m1=12kg,m2=3kg,L=380mm,l=95mm,x1=190mm,y1=5mm,R=70mm,r=27.5mm,θ1=-10°,θ2=-35°。由于結(jié)構(gòu)的限制,轉(zhuǎn)角θ最大為60°。做出當(dāng)機(jī)器人翻越不同高度障礙物時(shí),質(zhì)心點(diǎn)在基坐標(biāo)系中的軌跡如圖10(a)所示,圖中x軸、y軸分別代表質(zhì)心在基坐標(biāo)系中x0軸與y0軸上的位置,h軸代表機(jī)器人面對(duì)的不同障礙高度。
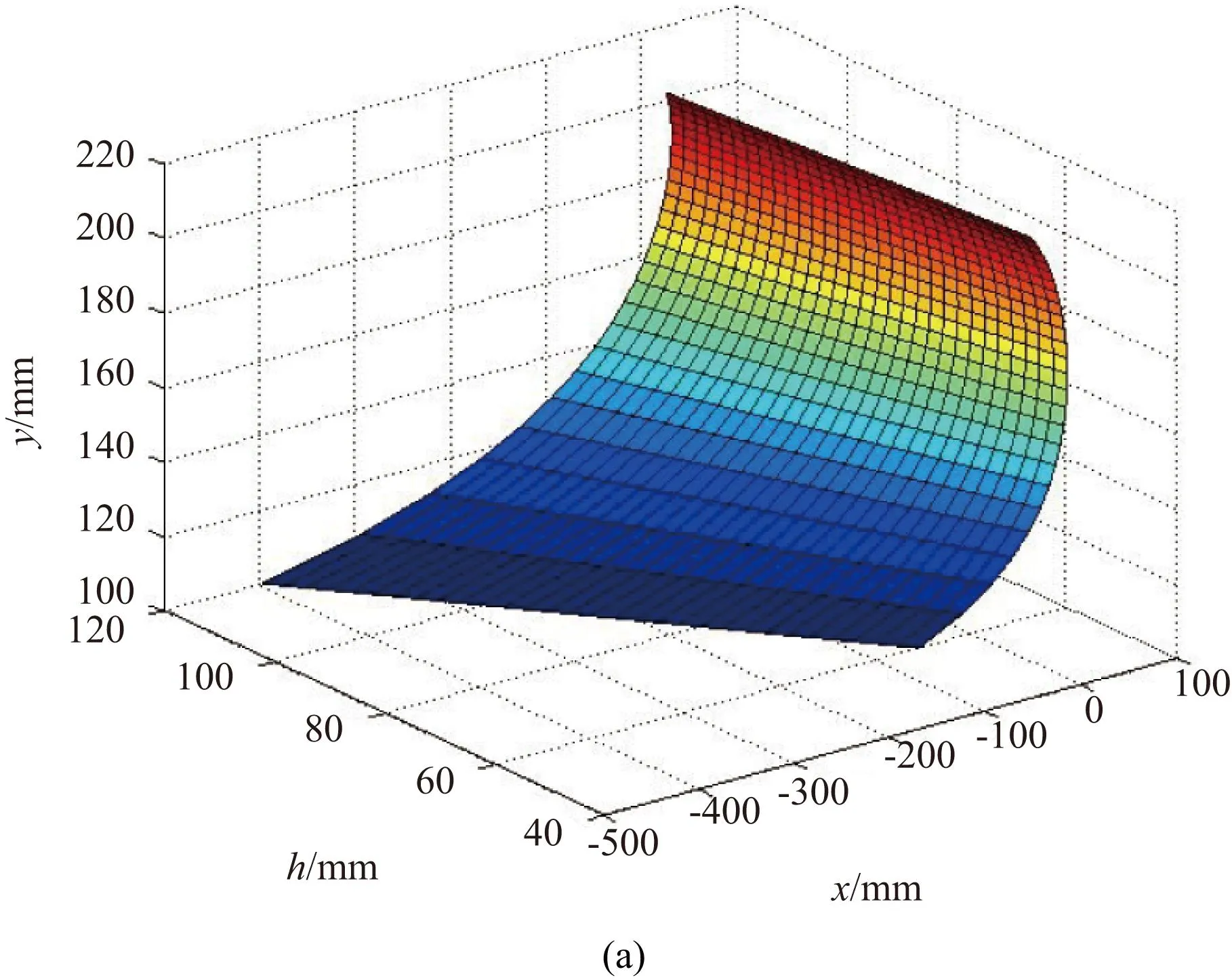
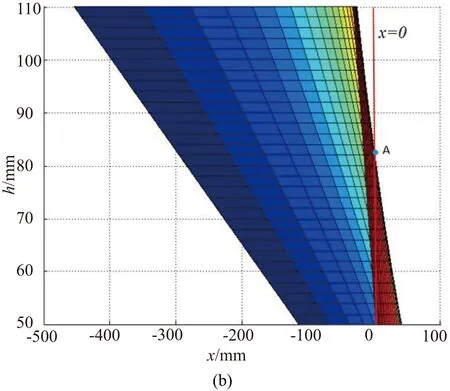
圖10 翻越不同高度障礙時(shí)機(jī)器人質(zhì)心軌跡
若機(jī)器人在翻越某一高度障礙時(shí),質(zhì)心軌跡能夠越過x=0平面,那么機(jī)器人便具有越過此高度障礙的能力。由圖10(b)(翻越不同高度越障時(shí)機(jī)器人質(zhì)心軌跡俯視圖)可以看到,只有障礙高度h位于A點(diǎn)以下時(shí),質(zhì)心軌跡可以超越x=0平面。A點(diǎn)對(duì)應(yīng)h軸上的坐標(biāo)為81.947,由此可知此時(shí)機(jī)器人的越障能力為81.947mm。
4實(shí)驗(yàn)
完成了機(jī)器人的樣機(jī)制作后,進(jìn)行了輪式、履帶等運(yùn)動(dòng)模式在不同路況下的運(yùn)動(dòng)試驗(yàn)、轉(zhuǎn)向?qū)嶒?yàn)以及越障實(shí)驗(yàn)。圖11中機(jī)器人能越過76mm的臺(tái)階。實(shí)驗(yàn)表明,機(jī)器人在室內(nèi)以及野外的非結(jié)構(gòu)環(huán)境中具有良好的運(yùn)動(dòng)特性,也驗(yàn)證了上述機(jī)器人越障性能的分析結(jié)果。
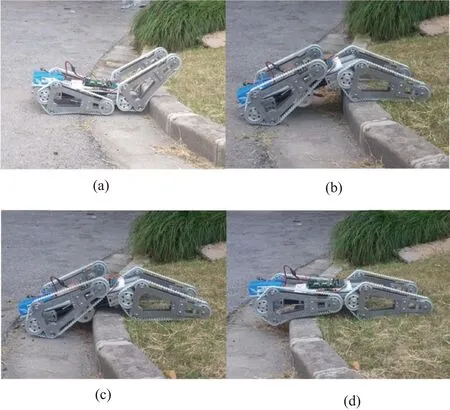
圖11 機(jī)器人越障性能試驗(yàn)
5結(jié)語
設(shè)計(jì)了一種既能在室內(nèi)良好環(huán)境又能在野外復(fù)雜環(huán)境中具有良好通過性能的輪履混合移動(dòng)機(jī)器人。該機(jī)器人具有輪式或履帶式兩種運(yùn)動(dòng)模式,可以在純輪式運(yùn)動(dòng)與純履帶式運(yùn)動(dòng)間切換。與同類機(jī)器人相比,具有體積小、結(jié)構(gòu)緊湊、能量效率高等特點(diǎn),一系列實(shí)驗(yàn)也驗(yàn)證了該機(jī)器人具有良好的環(huán)境適應(yīng)能力和越障能力,在偵查、探測(cè)等領(lǐng)域擁有廣闊的應(yīng)用前景。
參考文獻(xiàn):
[1] 朱磊磊, 陳軍. 輪式移動(dòng)機(jī)器人研究綜述[J]. 機(jī)床與液壓, 2009, 37(8): 242-247.
[2] Chopra A, Obsniuk M, Jenkin M R. The Nomad 200 and the Nomad SuperScout: Reverse engineered and resurrected[C]//Computer and Robot Vision, 2006. The 3rd Canadian Conference on. IEEE, 2006: 55-55.
[3] Dian S, Liu T, Liang Y, et al. A novel shrimp rover-based mobile robot for monitoring tunnel power cables[C]//Mechatronics and Automation (ICMA), 2011 International Conference on. IEEE, 2011: 887-892.
[4] Szynkarczyk P, Czupryniak R, Trojnacki M, et al. Current State and Development Tendency in Mobile Robots for Special Applications[C]//Proceedings of the International Conference WEISIC. 2008,(8): 30-41.
[5] Vu Q H, Kim B S, Song J B. Autonomous stair climbing algorithm for a small four-tracked robot[C]//Control, Automation and Systems, 2008. ICCAS 2008. International Conference on. IEEE, 2008: 2356-2360.
[6] Edlinger R, P?lzleithner A, Zauner M. Mechanical Design and System Architecture of a Tracked Vehicle Robot for Urban Search and Rescue Operations[M]//Research and Education in Robotics-EUROBOT 2010. SpringerBerlin Heidelberg, 2011: 46-56.
[7] Hoover A M, Burden S, Fu X Y, et al. Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot[C]//Biomedical Robotics and Biomechatronics (BioRob), 2010 3rd IEEE RAS and EMBS International Conference on. IEEE, 2010: 869-876.
[8] Wang Z, Ding X, Rovetta A, et al. Mobility analysis of the typical gait of a radial symmetrical six-legged robot[J]. Mechatronics, 2011, 21(7): 1133-1146.
[9] 司躍元. 輪履復(fù)合機(jī)器人的機(jī)械結(jié)構(gòu)設(shè)計(jì)及特性分析[D]. 天津:天津理工大學(xué),2013.
[10] W. Merhop, E. M. Hackbarth. 履帶車輛行駛力學(xué)[M]. 韓雪海,劉侃,周玉瓏,等譯. 北京:國防工業(yè)出版社, 1989.


收稿日期:2014-01-13
中圖分類號(hào):TP242
文獻(xiàn)標(biāo)志碼:B
文章編號(hào):1671-5276(2015)04-0152-05
作者簡(jiǎn)介:呂海洋(1989-),男,山東臨沂人,碩士研究生,研究方向:履帶機(jī)器人。
基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(51075272)
