基于非線性PID的冗余驅動機構控制
2016-01-29 03:52:02張壯王謙趙現朝高峰
機械制造與自動化 2015年4期
張壯,王謙,趙現朝,高峰
(上海交通大學 機械與動力工程學院,上海 200240)
基于非線性PID的冗余驅動機構控制
張壯,王謙,趙現朝,高峰
(上海交通大學 機械與動力工程學院,上海 200240)
摘要:冗余驅動機構是一個具有容錯、低速輸出的特殊機構。闡述了冗余驅動機構的工作原理,對該機構進行了運動學分析。在進行無刷直流伺服電機和絲杠傳動機構建模后,建立了冗余驅動機構的全閉環數學模型。在介紹線性PID基礎上,設計了應用于該傳動機構的非線性PID控制器。對該冗余驅動機構進行了頻響試驗,驗證了非線性PID控制器的合理可行。
關鍵詞:冗余驅動;伺服電機;非線性PID
Redundant Drive Mechanism Control Based on Nonlinear PID Controller
ZHANG Zhuang, WANG Qian, ZHAO Xianchao,GAO Feng
(School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
Abstract:The redundant drive mechanism is a special mechanism wich the fault-tolerance and stable low export. This article elaborates its working principle and does the kinematic analysis. After the brushless DC moter and the screw drive modelling, it establishes the close-loop control model of the redundant drive and based on the linear-PID, designs a nonlinear-PID, then its feasibility is proved through the frequency response test.
Keywords:redundant drive; servo motor; nonlinear PID
0引言
冗余驅動機構是指輸入驅動構件數多于輸出構件數的機構。由于冗余驅動機構的輸入構件較多,與一般驅動機構相比,該類機構有很強的容錯性和差速性。
國內外許多學者對多冗余驅動機構進行了研究。P.Choudhury和A.Ghosal研究得出通過增加冗余驅動關節和支鏈,可以減少并聯機器人工作空間的奇異區域[1]。上海交通大學高峰教授把冗余驅動機構用到了重型操作機和地震模擬器中。
對于冗余驅動機構的控制,傳統的線性PID控制效果已經遠不能達到人們的要求。為了提高機構的軌跡跟蹤特性,提出了各種算法。Nguyen[2]等提出了自適應PID控制算法,實現了6自由度并聯機器人的高精度軌跡跟蹤。合肥工業大學徐海青博士提出了基于前饋的非線性PID控制方法,取得了很好的控制效果
文中首先對冗余驅動機構進行原理介紹和機電控制系統建模,提出了非線性PID控制器設計。然后對該控制系統進行了試驗,試驗驗證了非線性PID控制器的合理和可行。
1冗余驅動機構
如圖1所示,雙驅動機構是由2組絲杠、2個齒輪和2臺電機組成。其中,每個絲杠螺母的內圈與絲杠形成螺旋副,絲杠螺母的外圈固聯齒輪。其工作原理:當2臺電機輸出相同速度時,2組絲杠轉速相同,齒輪無轉動,滑塊輸出速度等效于單臺電機輸出效果;當2臺電機輸出速度不同時,2組絲杠輸出速度不同,2個齒輪發生嚙合轉動。調節2組絲杠與螺母的轉速差,實現2組絲杠與螺母轉速差相同,最終實現同步輸出。
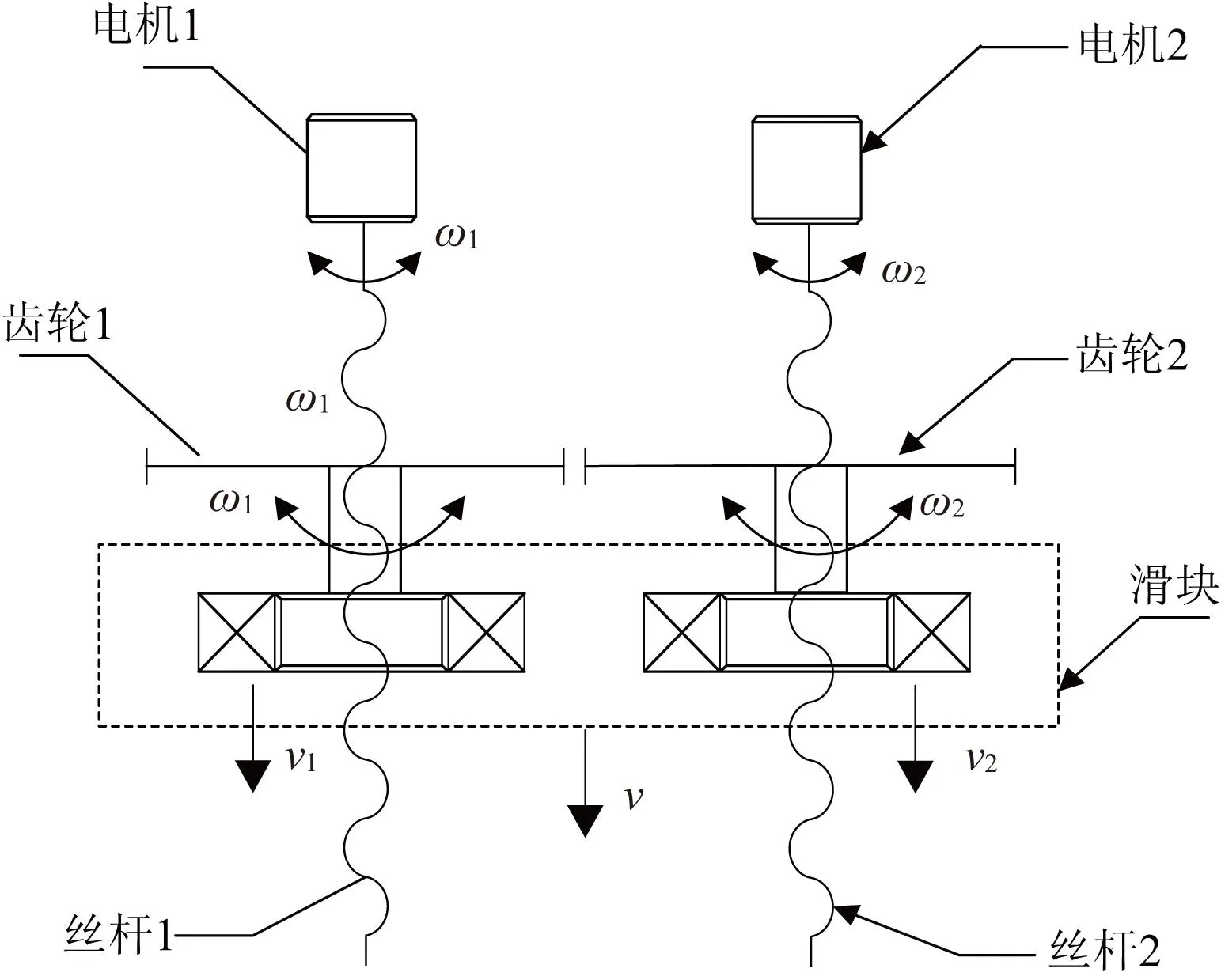
圖1 冗余驅動機構示意圖
在冗余驅動機構中2組絲杠旋向相反,在此定義兩導程P1、P2為矢量單位,左旋為正,右旋為負。由圖1可知,滑塊的速度和2個齒輪的軸向速度是相同的,即滑塊的速度:
ν=ν1=ν2
齒輪副中的2個齒輪轉速相同,即:
ω1'=ω2'
由螺旋副可知:
(1)
(2)
其中,n1、n2代表絲杠的頭數。
聯立式(1)和式(2),可得:
當Z1=Z2、n1=n1=1、P1=-P2=P(符號代表方向)時,則:
由此可知,滑塊的最終速度與雙驅動的輸出轉速差成正比,這種特性有兩種好處:1) 2臺電機在不變向時便能改變滑塊速度,且能夠在每個電機穩定輸出范圍內實現滑塊的低速輸出。2)2臺電機中的一個出現故障時,不會影響驅動端速度的輸出,具有明顯的容錯性能。
2雙驅動機構機電建模
2.1無刷直流伺服電機建模
無刷直流伺服電動機,其模型可由下面3個方程表達:
電樞回路電壓平衡方程為:
(3)
式中,ua(t)為電樞電壓,La和Ra分別為電樞電路的電感和電阻;ia為電樞電壓所產生的電樞電流;Ea為電樞電勢,Ea=ke×ω(t),ke為反電勢系數,ω(t)為電機轉速。
電磁轉矩方程為:
Mm(t)=kmia(t)
(4)
式中,Mm(t)為電樞電流產生的電磁轉矩;km為電機轉矩系數。
電機軸上的轉矩平衡方程(忽略摩擦等因素)為:
(5)
式中,Jm為電機和負載折合到電機軸上的轉動慣量。聯立式(3)、式(4)和式(5)得無刷直流伺服電機模型傳遞函數框圖如圖2所示。

圖2 無刷直流伺服電機數學模型傳遞函數框圖
處理可得電機的傳遞函數為:
2.2絲杠傳動建模[3]
當僅考慮慣性負載時,作用在電機軸的轉矩滿足如下動力學方程
(6)
(7)
其中:mg為螺母質量,mc為絲杠質量,p為滾珠絲杠的導程,μ為滾動導軌的摩擦系數,Ic為電機軸的轉動慣量。
且有電機絲杠轉速θL與絲杠螺母傳動輸出速度υL的關系:
則聯立式(6)與式(7)整理后得:
(8)

考慮到機械傳動系統扭轉剛度的影響,有:
Tr=KL(θr-θL)
(9)
其中,KL為絲杠的扭轉剛度。
聯立式(8)和式(9)可以得出機械傳動系統的方框圖,如圖3所示。從而可以得到機械系統的閉環傳遞函數為:
(10)

圖3 機械傳動系統控制框圖
2.3雙驅動機構全閉環建模
由無刷直流電機模型與絲杠傳動模型聯立就可以得到閉環電機絲杠傳動機構的模型,如圖4所示。其中,當閉環的位置反饋是由光柵尺測量得到的,所得到的模型就是位置全閉環模型。
冗余驅動機構的控制系統模型,是由2個單電機絲杠模型組合而成,如圖5所示。該模型的末端實際位置Ps是由光柵尺測量而得到的。
假設冗余驅動控制模型位置環算出速度為υ,2臺電機工作時的基速度為υ0,2臺電機的轉速分別為υ1和υ2。由冗余驅動的運動學可以知道該機構模型中的速度差分算法為:
υ1=υ0+υ
υ2=υ0-υ
圖5模型中的雙驅動輸出滑塊模塊速度與2組絲杠傳動模型得到的速度差成正比。

圖5 冗余驅動機構控制系統方框圖
3非線性PID控制器設計[4-5]

線性PID控制器的控制規律為:
其中,Kp為比例系數,Ki為積分系數,Kd為微分系數。
線性PID在對于低階和簡單模型的控制方面發揮很大作用。但是存在著系統的快速響應與超調量相矛盾的缺點,對于高階系統和時延系統等復雜系統控制效果不佳。
要想擺脫線性PID的固有缺點,需要深入了解控制系統的本質,設計出一些典型模塊來構成控制器。非線性PID控制的思想在于,當誤差超過設定的閥值時,控制器的輸出為非線性指數形式,以增加控制量;當誤差小于設定的閥值時,控制器的輸出為線性形式,以減小控制量。
先介紹跟蹤-微分器,如圖6所示,把參考輸入v(t)送入跟蹤-微分器Ⅰ,提取兩個信號Z11(t)和Z12(t),Z11(t)跟蹤v(t);把被調量y(t)送入跟蹤-微分器Ⅱ,提取兩個信號Z21(t)和Z22(t),Z21(t)跟蹤y(t)。

圖6 非線性PID控制器框圖
給出非線性PID控制器構造中需要用到的兩個函數為:

根據跟蹤-微分器可給出非線性PID控制器的具體形式為:
4試驗結果分析
頻響實驗指給系統一定頻率的正弦輸入信號,觀察系統跟隨該輸入的情況。頻響結果能夠直接反應系統的跟隨特性。越高的頻響特性,系統的跟隨性能越好。課題中對雙驅動機構進行8Hz、12Hz和15Hz的頻響實驗。每種頻響試驗又分為空載頻響和負載頻響試驗,分別對系統采用線性PID和非線性PID控制器,觀察各自的整定效果和系統跟隨特性。搭建真實的雙驅動機構如圖7所示。

圖7 冗余驅動機構實物圖
4.1空載頻響試驗
在冗余驅動機構末端不加任何負載,給系統幅值為500 um的正弦曲線,采用線性PID和非線性PID控制器,得到的測試曲線如圖8-圖10所示。

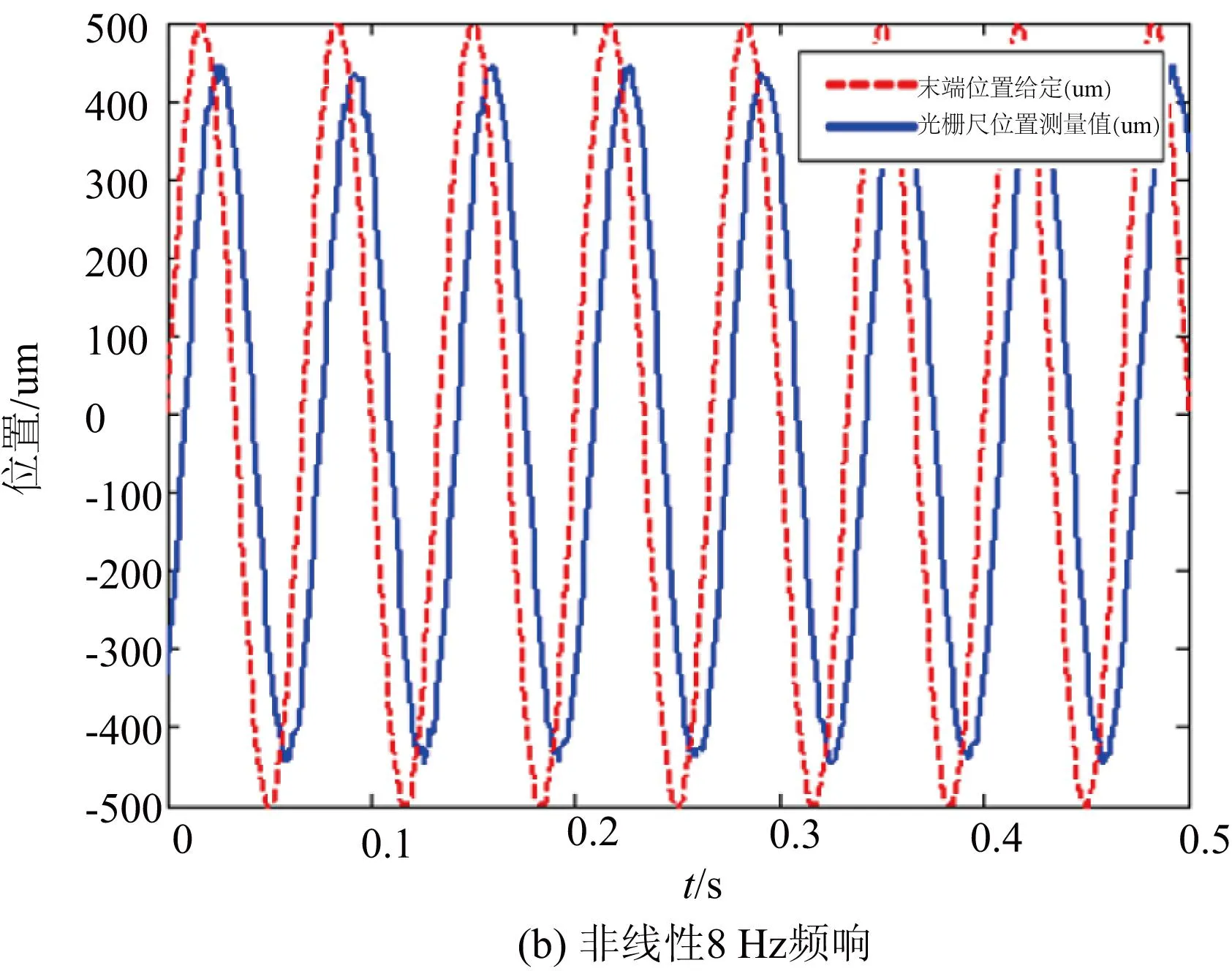
圖8 空載8 Hz頻響圖


圖9 空載12 Hz頻響圖

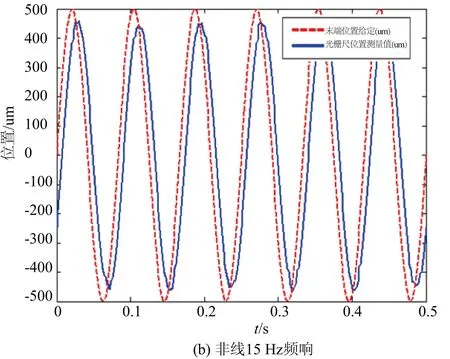
圖10 空載15 Hz頻響圖
表1是總結圖8-圖10中的頻響結果,可以看出非線性PID的整定效果明顯比線性PID的效果好。

表1 空載頻響試驗結果
4.2負載頻響試驗
給冗余驅動機構末端加上一個10kg的砝碼,在這種負載情況下測試雙驅動的頻響試驗,結果如圖11-圖13所示。


圖11 負載8 Hz頻響圖


圖12 負載12 Hz頻響圖
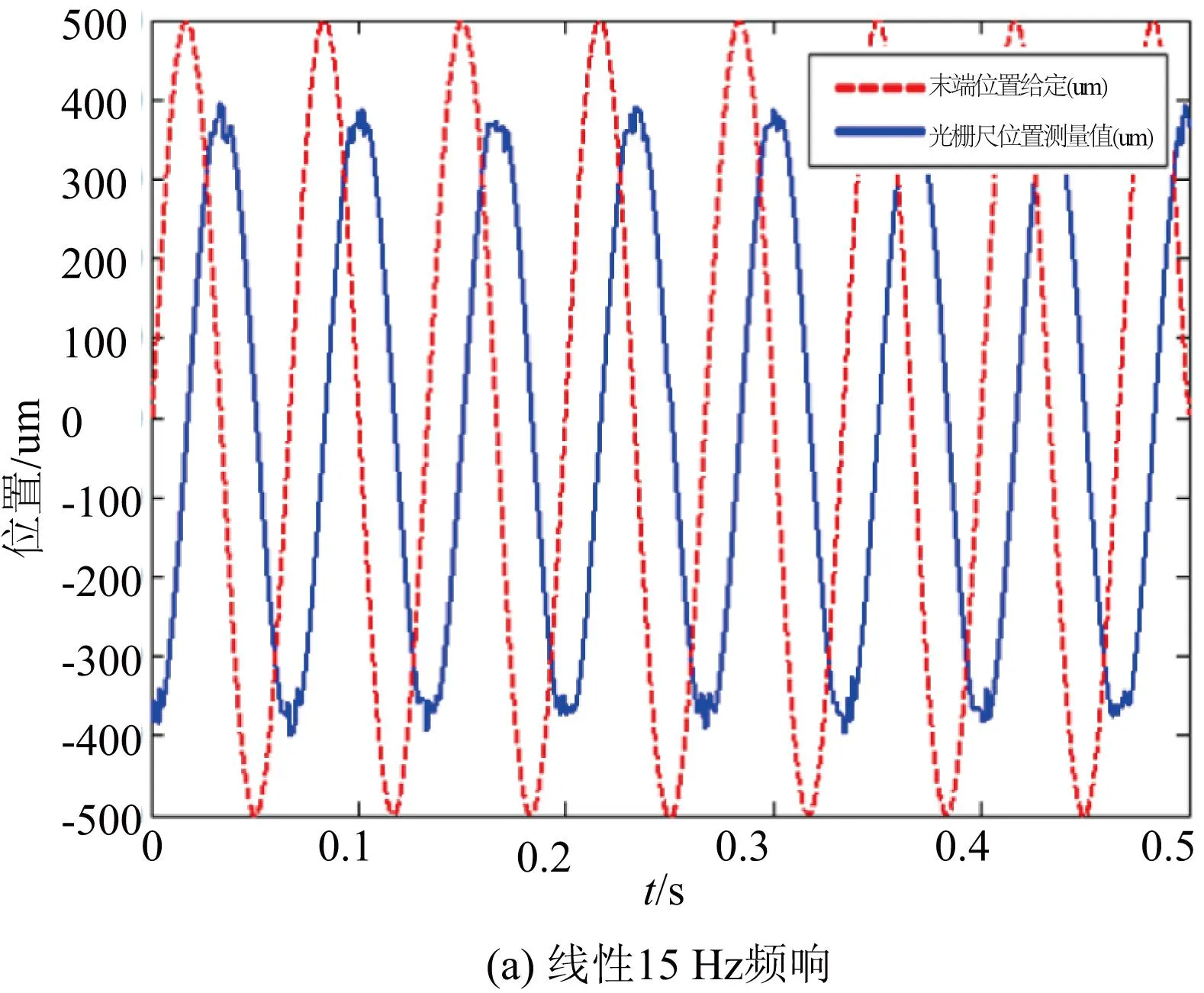

圖13 負載15 Hz頻響圖
表2是總結圖9-圖12中的頻響結果,可以看出非線性PID的整定效果明顯同樣比線性PID的效果好。
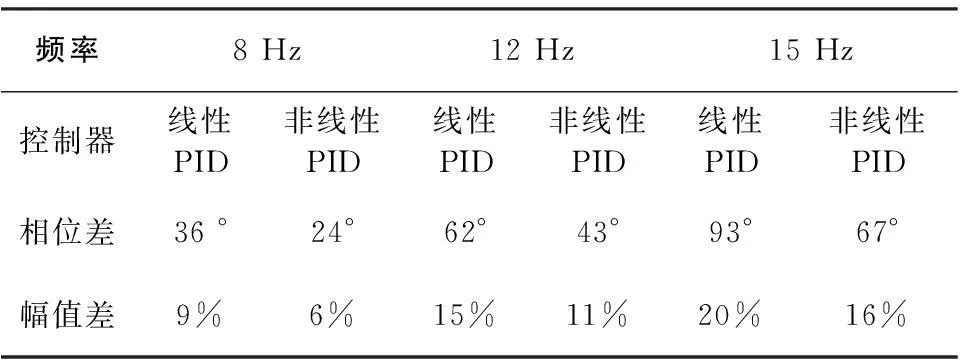
表2 空載頻響試驗結果
5結語
介紹了冗余驅動機構的工作原理,進行了機電系統建模。設計了非線性PID控制器,并通過頻響試驗驗證了該非線性PID控制器的合理和可行性。
參考文獻:
[1] Choudhury P Ghosal A.Singularity and controllability analysis of parallel manipulators and closed loop mechanisms. Mechanism and Machine Theory[J].2000,35(10):1455-1479.
[2] Charles C Nguyen,Sami S Antrazi,Zhou Zhenlei.Adaptive control of a stewart platform-based manipulator[J].J of Robotic Systems[J]. 1993,10(5):657-687.
[3] 張建政. 六維并聯冗余振作臺控制規劃與實驗關鍵技術研究[D]. 河北:河北工業大學,2006.
[4] 韓京清. 非線性PID控制器[J]. 自動化學報,1994,20(4):487-490.
[5] Bucklaew T P,Liu C S.A new nonlinear gain structure for PID-type controllers on robotic applications.Jounal of Robotic Systems[J]. 1999,16(11):627-649.


收稿日期:2014-02-24
中圖分類號:TM383.4+1;TP273
文獻標志碼:B
文章編號:1671-5276(2015)04-0167-05
作者簡介:張壯(1989-),男,安徽淮北人,碩士研究生,研究方向為并聯機構設計與控制。
