捷豹F-PACE新技術亮點(二)
2016-02-06 07:50:14李楊
汽車維修技師 2016年8期
李楊
捷豹F-PACE新技術亮點(二)
李楊
捷豹AWD 系統是一個連續可變的智能按需扭矩系統,使車輛能在標準的后輪驅動(RWD)狀態下操作,直至系統判斷需要啟用AWD。系統自動將扭矩輸送到所有4個車輪上,按照需要改變在前后車軸之間的分配。該系統的設計是始終先于車身穩定控制系統進行干預,提供更佳的穩定性和牽引力。通過重新分配車橋之間的扭矩以減少車輪打滑,從而減少車身穩定控制系統的干預。
分動器的內部壓力由專用軟件算法基于分動器電動液壓軸向活塞泵的電流消耗量來測定。分動器的內部溫度由專門軟件算法基于多個參數進行計算,如從前到后路面車輪打滑量。
AWD系統具有智能傳動系統動力(IDD),這是JLR內部開發的控制系統,用于實現AWD車輛的全部牽引和穩定性優勢,同時維持傳統捷豹RWD車輛的動態特點。智能傳動系統動力(IDD)系統是一項控制驅動扭矩分配的技術。該系統采用變速器控制模塊(TCM)、發動機控制模塊(ECM)、分動器控制模塊(TCCM)和動態穩定控制(DSC)系統,以提供最佳扭矩分配。IDD控制軟件位于TCCM中。IDD控制器每10ms都會監控車輛表現、駕駛員輸入和路面情況,并優化扭矩分配以充分發揮牽引性能、穩定性和偏航控制。
如果出現分動器故障,則信息中心將向駕駛員呈現“僅限2WD - 牽引力降低”的信息。故障的性質可使用認可的診斷設備來診斷,診斷設備將讀取存儲在分動器控制模塊(TCCM)存儲器中的故障碼。診斷系統將檢測到與電控液壓執行器電機相關的電氣故障。例如,對地短路或斷路。注意:診斷系統無法檢測到機械故障。例如,離合器卡滯在分離或接合位置、鏈條斷裂或機油油位低。
分動器保養維修,以下部件可在保養時更換:
◆軸向活塞泵
◆分動器控制模塊(TCCM)

圖5 自適應路面響應符號

圖6 全路況進程控制 (ARPC)開關
◆徑向油封
◆變速器安裝架
3. 自適應路面響應
自適應路面響應通過捷豹駕駛控制系統(JDC)選擇,如圖5所示,自適應路面響應與自適應減震一起安裝,且僅與四輪驅動 (AWD)和自動變速器搭配使用。如果裝配,該功能將替代捷豹駕駛控制系統(JDC)中的冬季模式。自適應路面響應圖標將出現在 JDC 開關組上。 集成懸架控制模塊(ISCM)托管自適應路面響應軟件。自適應路面響應會自動識別不同路面之間的差異。 該程序會計算車輛是否在結冰路面、潮濕路面、積雪、沙礫或沙地上行駛。從防抱死制動系統(ABS)控制模塊和集成懸架控制模塊(ISCM)獲取信息以進行計算。駕駛員不必手動選擇環境條件的類型。類似于冬季模式,自適應路面響應讓各種能力水平的駕駛員更輕松地在低到中摩擦路面上駕駛。自適應路面響應的優點是系統能充分利用所有車輛系統來保證各種路面上的平穩駕駛。例如,從雪地駕駛到結冰路面或從泥地駕駛到沙地。系統將自動計算車輛正在哪種路面上行駛,做出必要的調整來最大化平穩性并避免損失牽引力。為了充分利用自適應路面響應的能力,建議采用適用于各種條件的輪胎。自適應路面響應與以下系統和車輛功能互動:
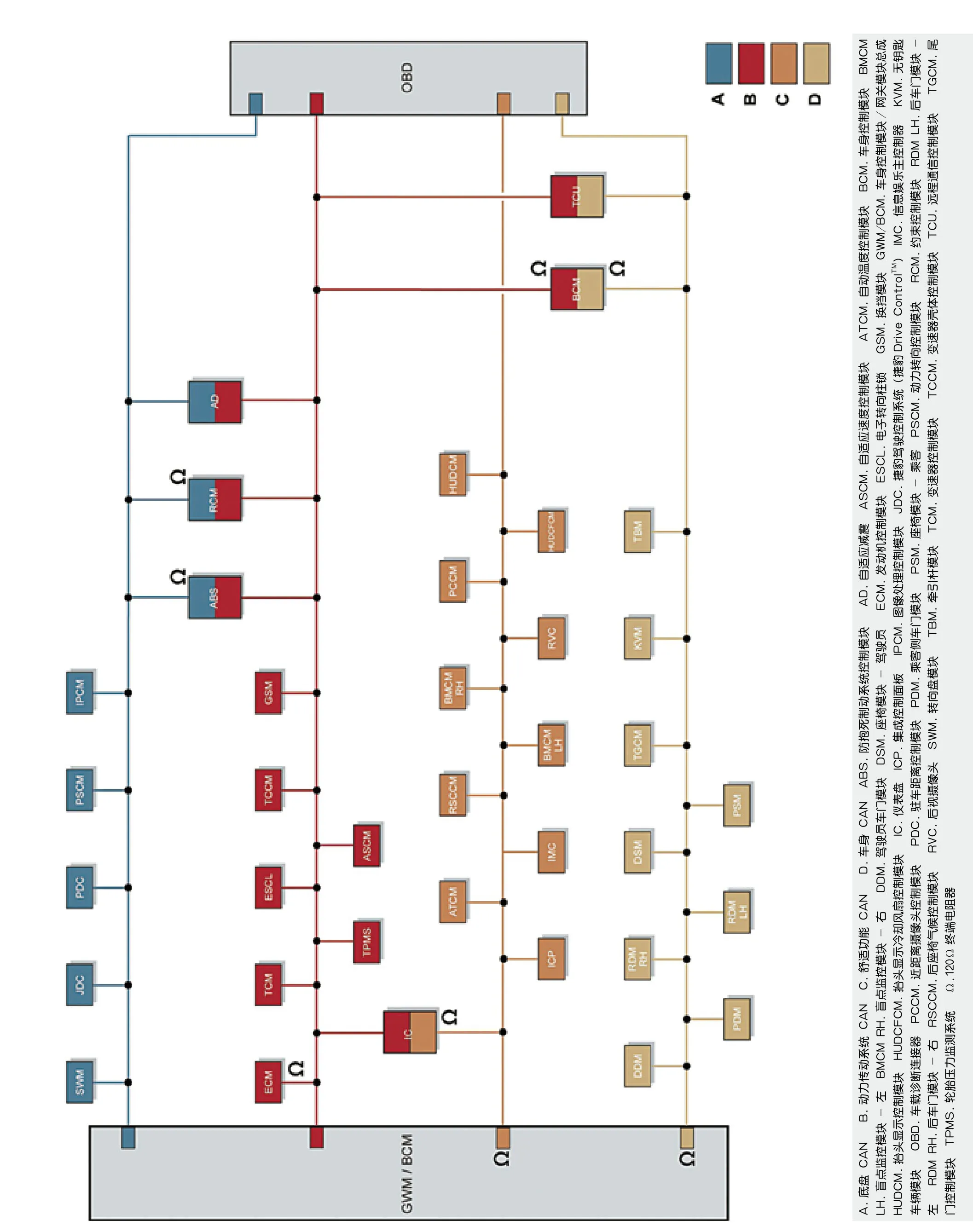
圖7 車載網絡拓撲圖
◆自適應減震
◆發動機管理
◆動態穩定控制(DSC)系統
◆自動變速器
◆四輪驅動(AWD)系統
注意:自適應路面響應僅在與自動變速器、四輪驅動(AWD)和自適應減震(AD)結合使用時才可用。
4.全路況進程控制(ARPC)
全路況進程控制是一項低速下針對所有路面條件的速度控 制功能,僅作為F-PACE的選配提供。該功能在車速介于 3.6~30km/h之間時運作。它是一項自主系統,無須駕駛員的踏板輸入。系統使用ARPC開關啟動,然后使用現有的速度控制開關選擇所需的車速。目標速度隨后顯示在儀表盤(IC)上。ARPC可隨時在其活動速度范圍內設置。ARPC 開關位于地板控制臺中,在捷豹駕駛控制系統開關組后面,如圖6所示。當啟動全路況進程控制時,儀表盤(IC)上會亮起一個警告指示燈。注意:全路況進程控制僅在與自動變速器搭配時才可用。
四、車身電氣系統
1.車載網絡拓撲圖
如圖7所示,F-PACE 采用多CAN 網絡拓撲,具有4個主 CAN 網絡。
2. LED前照燈
多區域LED前照燈提供全部前方照明功能。上部區域提供近光燈和適應前部照明系統(AFS),該區域隨著駕駛員轉向輸入旋轉。下部區域提供遠光燈和靜態轉彎照明燈。如果方向指示燈已打開或有轉向信號輸入時,則當車速小于40km/h時,靜態轉彎照明燈會啟動以45°角照亮轉向側的道路或車道。 LED 日間行車燈(DRL)、示寬燈和方向指示燈集成形成 J-Blade。LED照明裝置降低了充電系統約6%的寄生負載,反過來降低了CO2排放。LED燈用于高規格車輛,具有以下優點。
◆降低寄生損失,改善了約6%
◆碳排放更低
◆更高的光密度
◆組件體積更小,這樣制造商在設計照明單元時可以更為靈活
LED前照燈總成具有額外的功能,可以增強駕駛員在黑暗中駕駛時的能見度。這些功能是:
◆自動大燈控制
◆自動遠光燈控制
◆自動前照燈調平
◆靜態彎道燈
◆自適應前部照明系統(AFS)
前照燈控制框圖如圖8所示,各燈的操作如下。
(1)日間行車燈(DRL):為了使 DRL 運行,發動機必須運行,換擋手柄處于P以外的擋位。 最初啟動車輛后,在退出駐車擋之前,DRL不會亮起。 一旦DRL啟亮,如果將車輛重新置于P擋,則 DRL 將保持點亮。LED 日間行車燈(DRL)、示寬燈和轉向燈共用“J”形條燈。DRL和示寬燈功能由BCM通過LIN5控制。
(2)靜態彎道燈(SBL):發動機必須運行,車輛必須處于行駛擋。SBL 點亮前,車輛還必須收到轉向輸入。靜態彎道燈(SBL) 在車速低于70km/h時運行,可照亮道路或車道以輔助駕駛員。靜態彎道燈由BCM通過LIN5控制
(3)自適應前部照明系統(AFS):發動機必須運行,車輛必須處于行駛擋。車輛還必須檢測到速度輸入和轉向輸入,AFS才會運行。系統可使此模塊最多水平旋轉15°。AFS 系統只在設定的速度范圍內工作,因此需要來自 ABS 單元的車速信號才能實現這一點。 車速及轉向角信號通過高速 CAN 傳輸至BCM/GWM。 然后 BCM/GWM 通過向前照燈單元發送 LIN信號來控制運動角度。執行器不向 BCM/GWM提供位置反饋信號。 在點火開關打開時,每次激活 AFS 系統時,每個步進電機都需要定位。 當 AFS 系統處于激活狀態下時,每個水平執行器驅動至內側位置,直到到達執行器中的一個機械止動裝置。 一旦到達停止位置,BCM/GWM 中的步進計數器將設置為零,然后將執行器操作至由 AFS 軟件決定的工作位置。AFS功能由BCM通過LIN7控制。
(4)前大燈自動調平:F-PACE 具有自動前照燈調平功能。通過將兩個高度傳感器安裝至右前和右后懸架來實現該功能。兩個傳感器均直接連接至 BCM/GWM,為傳感器提供 5V電源和接地。 傳感器信號線也直接連接至 BCM/GWM。隨著車輛負載增加,傳感器輸出減少。空載車輛的兩個調平傳感器將產生約3.5V的電壓。BCM/GWM根據高度傳感器信號向前照燈輸出模擬控制電壓信號,認為要照射高度隨之調整。前照燈水平不會在懸架運動后立即調整,這是因為系統中刻意加入了延遲,從而將道路上的制動、加速和顛簸考慮在內。
3. 活動鑰匙
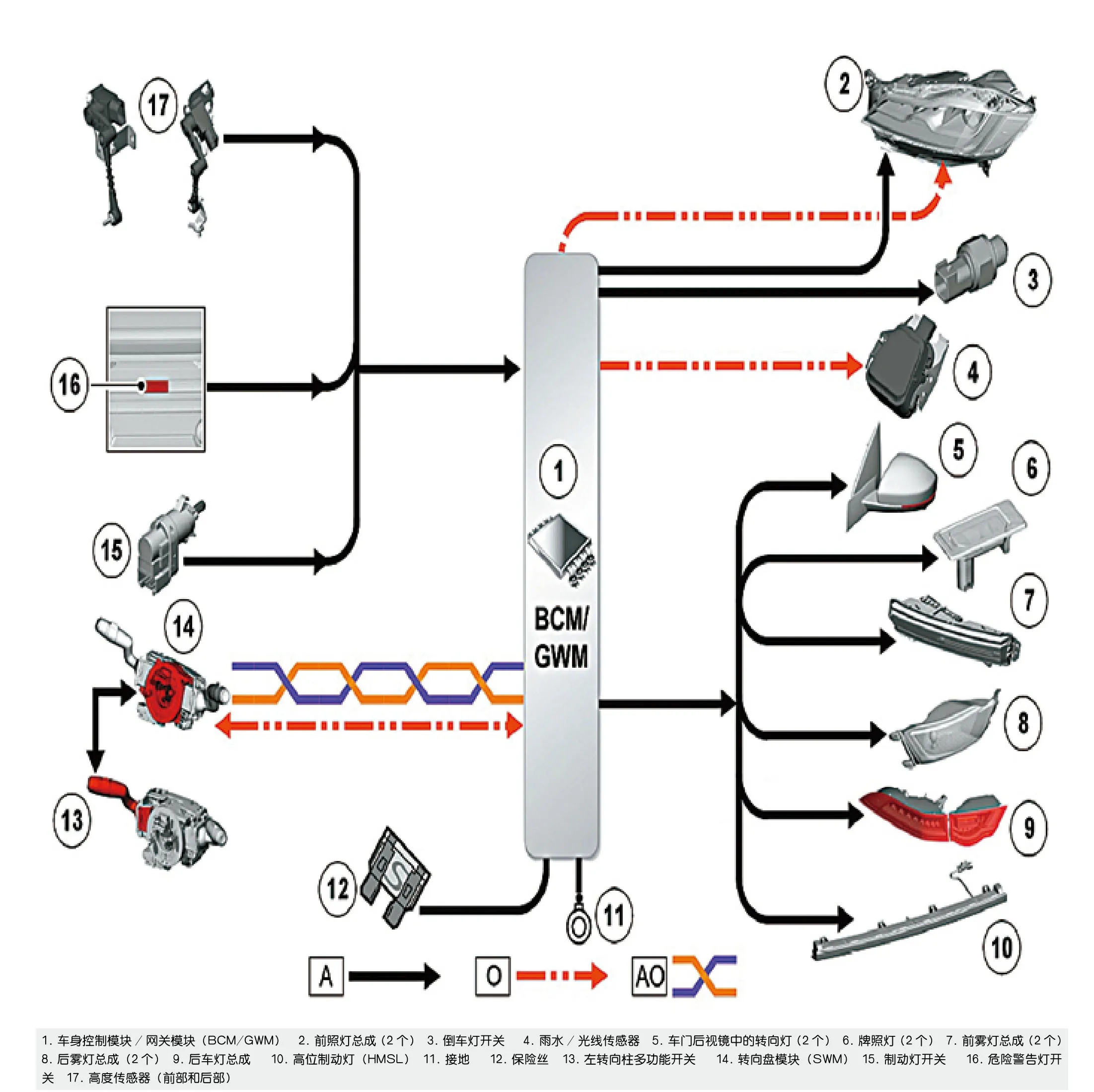
圖8 前照燈控制框圖

圖9 活動鑰匙
活動鑰匙如圖9所示,有了活動鑰匙,當你開車進行休閑活動(如海濱娛樂、登山)時,可不必將車輛智能鑰匙帶在身上。活動鑰匙支持運動和休閑活動,或為駕駛員提供了輕松旅游的選項。 它允許駕駛員將智能鑰匙鎖在車內并禁用。活動鑰匙包裹在腕帶中,腕帶包含一個封裝在防水環境中的微型芯片,但不包含電池。活動鑰匙的防水深度最大為 30m。除了最多8個智能鑰匙,系統還允許將共計8個活動鑰匙編程到車身控制模塊(BCM) 中。必須使用診斷設備上的應用程序對活動鑰匙進行編程。一旦編程,則無法互換車輛的活動鑰匙。活動鑰匙不能用來啟動車輛,無法使用活動鑰匙來激活姿勢控制尾門或免鑰匙進入系統。
如圖10所示,使用活動鑰匙鎖閉車輛,離開車輛且最后一個車門(包括機蓋或后備箱門)關閉后,用戶將在30s內將活動鑰匙裝置放在活動鑰匙收發器模塊上30mm距離以內(后備箱捷豹字母的“J”處),這將授權車輛進行鎖閉。 留在車內的任何智能鑰匙將被禁用,不允許打開點火開關或啟動車輛。被禁用的智能鑰匙可以解鎖車輛。對于車輛鎖閉時不在車內的任何智能鑰匙,不會使其喪失啟動車輛的能力。方向指示燈將閃爍以確認車輛鎖閉。
要使用活動鑰匙解鎖車輛,按下外部尾門開關以激活活動鑰匙收發器模塊,在30s內,將活動鑰匙放在活動鑰匙收發器模塊上。車輛將會解鎖,車內的智能鑰匙將由車身控制模塊(BCM) 啟用。如果丟失了活動鑰匙,可以使用未被禁用的備用智能鑰匙來解鎖和啟動車輛。用已啟用的智能鑰匙打開點火開關還將啟用任何已禁用的智能鑰匙。如果丟失了活動鑰匙并且沒有備用鑰匙,駕駛員必須聯系道路援助,并采用與丟失智能鑰匙所采用的相同處理方法進行處理。可能需要強制進入車輛。 可以使用 SDD 應用程序刪除丟失的活動鑰匙。

圖10 使用活動鑰匙

圖11 活動鑰匙工作框圖
注意:如果使用不同的活動鑰匙或 InControl 智能馭領 高級遠程遙控來解鎖車輛,已禁用的智能鑰匙將仍保持禁用狀態。如果使用活動鑰匙鎖閉車輛,用已啟用的智能鑰匙打開車門但未打開點火開關或啟動車輛,禁用的智能鑰匙將仍保持禁用狀態。不要認為上述情況是故障。
活動鑰匙工作框圖如圖11所示,下面以上鎖為例,說明其工作流程。當所有車門關閉后30s內,活動鑰匙收發器模塊激活,當檢測到有效活動鑰匙時,收發器模塊通過LIN向BCM發送信息。BCM執行上鎖,并與RFA通過中速CAN通信,RFA啟動車內低頻天線搜尋鑰匙,所有車內鑰匙將禁用啟動功能。
(待續)
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童故事畫報(2016年3期)2016-05-17 07:54:55
公民與法治(2016年4期)2016-05-17 04:09:26
小朋友·快樂手工(2015年2期)2015-03-13 00:15:54
教師博覽(2007年6期)2007-06-20 07:02:18
