日盲紫外探測(cè)技術(shù)的軍事應(yīng)用
2016-02-23 07:01:54賴水清
直升機(jī)技術(shù) 2016年2期
鮮 勇,賴水清
(1.海裝武漢局,湖北 武漢 430064; 2.中國(guó)直升機(jī)設(shè)計(jì)研究所,江西 景德鎮(zhèn) 333001)
日盲紫外探測(cè)技術(shù)的軍事應(yīng)用
鮮 勇1,賴水清2
(1.海裝武漢局,湖北 武漢 430064; 2.中國(guó)直升機(jī)設(shè)計(jì)研究所,江西 景德鎮(zhèn) 333001)
論述了日盲紫外探測(cè)的原理、作用及系統(tǒng)組成,重點(diǎn)對(duì)日盲紫外探測(cè)技術(shù)在導(dǎo)彈逼近告警、通信、海上搜救、無人機(jī)自動(dòng)著艦導(dǎo)引等軍事方面的應(yīng)用進(jìn)行了分析研究。
日盲紫外探測(cè);軍事應(yīng)用
0 引言
自然界中,太陽(yáng)是最強(qiáng)烈的紫外光輻射源。當(dāng)太陽(yáng)的紫外光通過大氣時(shí),0.24μm~0.28μm波段的紫外光被大氣中的臭氧層強(qiáng)烈吸收而難以到達(dá)地球表面,從而形成太陽(yáng)紫外光在近地表面的盲區(qū),人們通常稱之為日盲區(qū),而波長(zhǎng)在 0.24μm~0.28μm之間的紫外光稱為日盲紫外。如圖1所示[1]。
太陽(yáng)是最典型、能力最強(qiáng)的自然光源,其光譜覆蓋了從極遠(yuǎn)紫外到遠(yuǎn)紅外的整個(gè)光譜區(qū),它會(huì)直接或間接地產(chǎn)生大氣背景輻射,對(duì)近地面工作的光電探測(cè)系統(tǒng)造成嚴(yán)重的背景干擾。這種干擾除了會(huì)增加系統(tǒng)信號(hào)處理的負(fù)擔(dān),還會(huì)使系統(tǒng)產(chǎn)生虛警。日盲區(qū)的存在為近地表面工作于該波段的系統(tǒng)提供了天然的“保護(hù)傘”。當(dāng)系統(tǒng)進(jìn)行對(duì)空目標(biāo)探測(cè)時(shí),避開了最強(qiáng)的自然光源,系統(tǒng)在背景極其簡(jiǎn)單的條件下工作。這就降低了系統(tǒng)的信號(hào)處理難度,為系統(tǒng)高速采集紫外光信息提供了方便。
日盲紫外光與可見光和紅外光相比,具有目標(biāo)特征明顯、抗干擾能力強(qiáng)、選擇性好等特點(diǎn)。20世紀(jì)后期,隨著光探測(cè)技術(shù)的發(fā)展,日盲紫外探測(cè)技術(shù)愈來愈受到重視,并在刑偵檢測(cè)、醫(yī)學(xué)、生物學(xué)等多個(gè)領(lǐng)域得到應(yīng)用,同時(shí)其軍事應(yīng)用價(jià)值也越來越受到關(guān)注。美國(guó)等軍事強(qiáng)國(guó)已將日盲紫外探測(cè)技術(shù)成功應(yīng)用于導(dǎo)彈逼近告警、通信、海上搜救、著陸等方面。
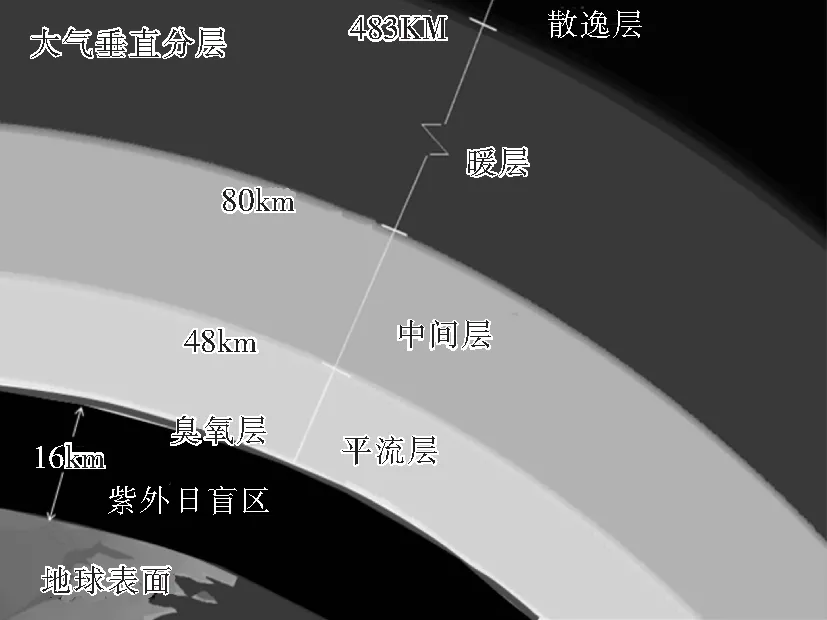
圖1 紫外日盲區(qū)示意圖
我國(guó)日盲紫外探測(cè)技術(shù)在理論研究與實(shí)際應(yīng)用方面與國(guó)外都有較大的差距,欣喜的是已經(jīng)開始重視日盲紫外探測(cè)技術(shù)的研究,科研投入也比以前有了大幅度的提高,正在船舶破霧引航、森林火情告警、電網(wǎng)安全監(jiān)測(cè)、海上搜救等方面得到應(yīng)用。
1 日盲紫外探測(cè)系統(tǒng)
日盲紫外探測(cè)系統(tǒng)的主要任務(wù)是探測(cè)目標(biāo)的日盲紫外信號(hào),對(duì)信號(hào)進(jìn)行處理后輸出目標(biāo)的相關(guān)信息。如圖 2所示,一個(gè)典型的日盲紫外探測(cè)系統(tǒng)通常由信號(hào)探測(cè)單元、信息處理單元和結(jié)果輸出單元三部分組成。
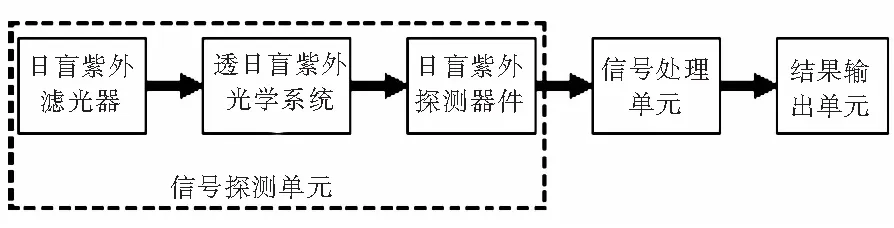
圖2 日盲紫外探測(cè)系統(tǒng)結(jié)構(gòu)
日盲紫外濾光器是保證探測(cè)系統(tǒng)不被非日盲波段光信號(hào)干擾的關(guān)鍵元件。濾光片一般有干涉型濾光片和吸收型濾光片兩種。從國(guó)內(nèi)外的技術(shù)現(xiàn)狀來看,干涉型濾光片不能滿足通信需求。如國(guó)內(nèi)最好的紫外干涉濾光片在正入射時(shí),背景光抑制效果為10~5,離滿足通信應(yīng)用還差3~4個(gè)數(shù)量級(jí)。要提高抑制效果,就必須犧牲透過率。當(dāng)滿足抑制效果時(shí),透過率太低。吸收型濾光片具有雜光截止度深、與入射光角度無關(guān)的優(yōu)點(diǎn),特別適合紫外光通信既需要深截止、又要求較大視場(chǎng)的要求。由于國(guó)外高性能的吸收型紫外濾光片禁運(yùn),國(guó)內(nèi)開展了基于有機(jī)染料、濾光薄膜、納米多孔玻璃等多種材料的探索和研究,自主研制出了高性能日盲紫外濾光器件[2]。
日盲紫外探測(cè)系統(tǒng)是以探測(cè)目標(biāo)的日盲紫外信號(hào)為基礎(chǔ),這必然要求其光學(xué)系統(tǒng)在日盲型紫外波段有較高的透過率。普通玻璃對(duì)日盲紫外光有很強(qiáng)的吸收作用,無法滿足系統(tǒng)要求;而紫外光學(xué)石英玻璃(用氫氧焰熔化高級(jí)水晶粉料而成的光學(xué)石英玻璃),在日盲紫外波段的平均透過率超過 60%,在 253.7nm處更是超過 90%。
對(duì)日盲紫外探測(cè)系統(tǒng)而言,探測(cè)器件的優(yōu)劣直接影響系統(tǒng)的性能。一個(gè)優(yōu)良的日盲紫探測(cè)器滿足以下幾個(gè)條件:對(duì)日盲紫外波段以外的光線不敏感,具有較高的量子效率、較大的動(dòng)態(tài)范圍、較低的噪聲和較強(qiáng)的信號(hào)放大能力。日盲紫外探測(cè)系統(tǒng)按其探測(cè)器件類型可分非成像型探測(cè)系統(tǒng)和成像型探測(cè)系統(tǒng)兩種。前者的探測(cè)器件為光電倍增管等單元器件,后者的探測(cè)器件為電荷耦合器件(charge coupled device,CCD)等成像器件。自1970 年美國(guó)貝爾電話實(shí)驗(yàn)室研制成功第一只CCD以來,光電成像器件不斷發(fā)展,隨著微通道板(micro-channel plate,MCP)和紫外CCD技術(shù)的不斷成熟,出現(xiàn)了圖像增強(qiáng)CCD(ICCD)、背向照明CCD(BCCD)和電子轟擊CCD(EBCCD)等多種可用于紫外探測(cè)成像的CCD器件。
2 導(dǎo)彈逼近紫外告警
導(dǎo)彈逼近紫外告警是在“日盲區(qū)”搜集導(dǎo)彈紫外輻射信號(hào),實(shí)施探測(cè)和識(shí)別,顯示其方位角并發(fā)出警報(bào),在多重威脅出現(xiàn)時(shí),進(jìn)行威脅等級(jí)排序,提出對(duì)抗決策建議。典型的導(dǎo)彈逼近紫外告警系統(tǒng)包括紫外探測(cè)單元、信號(hào)處理單元和顯示/控制單元,如圖3所示。
紫外探測(cè)單元通常包括四個(gè)或六個(gè)紫外傳感器,組合起來構(gòu)成全方位、大空域的覆蓋(例如360°×92°范圍),每個(gè)傳感器均以凝視工作體制收集紫外輻射,經(jīng)光電轉(zhuǎn)換和多路傳輸把信號(hào)送至信號(hào)處理單元。信號(hào)處理單元先對(duì)信號(hào)做預(yù)處理,再送入計(jì)算機(jī)做統(tǒng)計(jì)判決,確定有無威脅源。若有,則解算其方位角,并向顯示/控制單元發(fā)送信息;若有多個(gè)威脅源,則還要排定威脅程度的次序。顯示/控制單元在接收信息后,以聲、光或者電信號(hào)報(bào)警并顯示目標(biāo)信息,同時(shí)啟動(dòng)相應(yīng)機(jī)構(gòu)實(shí)施抗御[3]。
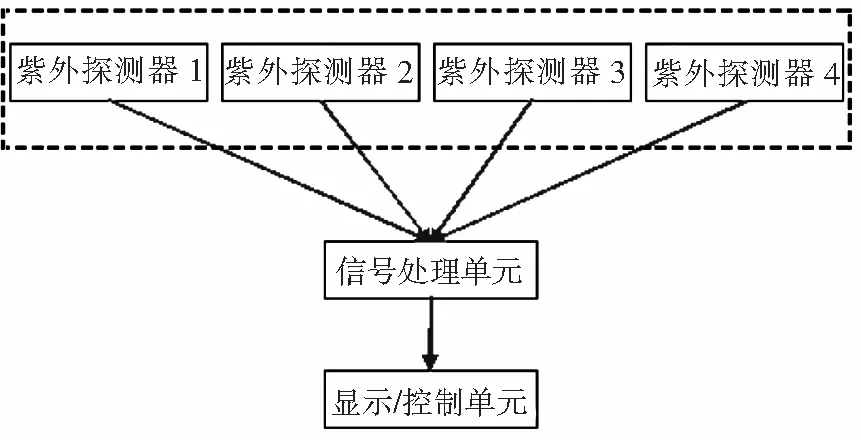
圖3 導(dǎo)彈逼近紫外告警系統(tǒng)的結(jié)構(gòu)圖
自1987年美國(guó)洛勒爾公司成功研制出世界上第一臺(tái)導(dǎo)彈逼近紫外告警系統(tǒng)以來,由于其具有虛警低,不需低溫冷卻,不掃描,告警器體積小和重量輕等優(yōu)點(diǎn),各國(guó)以它作為新的競(jìng)爭(zhēng)領(lǐng)域,不斷推陳出新,其告警體制也已歷經(jīng)了兩代技術(shù)革新。
第一代產(chǎn)品基本上都是以單陽(yáng)極光電倍增管作為探測(cè)器件,雖然具有體積小、重量輕、低虛警和低功耗的優(yōu)點(diǎn),但同時(shí)也存在著角分辨率低、靈敏度不高等缺點(diǎn)。美國(guó)的AN/AAR-47 型導(dǎo)彈逼近紫外告警系統(tǒng)為第一代導(dǎo)彈逼近紫外告警系統(tǒng)的典型代表。以色列的“吉它-300”、“吉它-320” 型導(dǎo)彈逼近紫外告警系統(tǒng)和南非的MAW型導(dǎo)彈逼近紫外告警系統(tǒng)也在此列。
第二代產(chǎn)品以面陣器件為核心探測(cè)器,具有角分辨率高,探測(cè)能力強(qiáng),可對(duì)導(dǎo)彈進(jìn)行分類識(shí)別并能引導(dǎo)定向紅外對(duì)抗光束的特點(diǎn),具有優(yōu)異的技術(shù)性能和較好的態(tài)勢(shì)估計(jì)能力。這類告警系統(tǒng)的探測(cè)器采用256×256或512×512等像素的面陣器件組合,以大視場(chǎng)、大孔徑對(duì)空間的紫外信息進(jìn)行接收,實(shí)現(xiàn)光電圖像的增強(qiáng)、耦合和轉(zhuǎn)換,經(jīng)計(jì)算機(jī)處理后作出有無導(dǎo)彈威脅的判斷;還能將具威脅的導(dǎo)彈以點(diǎn)源的形式表征在圖像上,通過解算圖像得出導(dǎo)彈在空間的相應(yīng)位置,并進(jìn)行距離的粗略估算。主要產(chǎn)品有美國(guó)西屋公司的AN/AAR-54、AN/AAR-60 型導(dǎo)彈逼近紫外告警系統(tǒng)和利頓公司的AMAWS型導(dǎo)彈逼近紫外告警系統(tǒng),德國(guó)宇航公司的“米爾茲-2”(MILDS-2)型導(dǎo)彈逼近紫外告警系統(tǒng)。
3 紫外通訊
紫外通信的波段范圍一般選擇在日盲區(qū)域,具有靈活、難以截獲、抗干擾性強(qiáng)等特點(diǎn),并具備一定的非視距通信能力。其技術(shù)特點(diǎn)、器件發(fā)展情況以及應(yīng)用領(lǐng)域,在各國(guó)都還是一個(gè)比較新的研究方向,普遍處于探索和研制階段。

圖4 AN/AAR-54型導(dǎo)彈逼近紫外告警系統(tǒng)實(shí)物
3.1 日盲紫外通信的特點(diǎn)
1) 抗干擾能力強(qiáng)
一方面,紫外線在大氣層中受到臭氧層和氧氣的吸收,使得近地表面的紫外線干擾很少,散射的作用也使得近地表面的紫外線以均勻方式分布,反映在接收端為直流的電平信號(hào),從而可以利用濾波的方式去除這些背景信號(hào);另一方面,由于紫外線衰減較快,所以第三方也不能在遠(yuǎn)方對(duì)本地施行紫外干擾[4]。
2) 保密性高
一是低竊聽率:紫外線在傳輸過程中由于大氣分子、懸浮顆粒的吸收和散射作用,能量衰減得很快,因此是一種有限距離的無線通信;在通信距離以外,能量已衰減消失,使得采用高靈敏度的紫外線探測(cè)器也不易竊聽。二是低位辨率: 紫外線是不可見光,所以肉眼很難發(fā)現(xiàn)信號(hào)源的方位;紫外線又是以散射的形式向四面八方發(fā)射信號(hào),因而很難從這些散射信號(hào)中判斷出信號(hào)源的所在位置。
3) 全方位全天候工作
紫外通信主要是利用了紫外線的散射能力,在以光源為中心的有效半徑內(nèi)都可以接收到通信信息,不會(huì)像激光那樣具有強(qiáng)烈的方位性。日盲區(qū)域內(nèi)太陽(yáng)的近地輻射微弱,因而即使在白天也不會(huì)有太大的干擾信號(hào)。季節(jié)、海拔高度、氣候、能見度等因素的影響和太陽(yáng)輻射的影響一樣,在特定的時(shí)間和地點(diǎn)都可以看成是一種低頻的背景信號(hào),可以很容易地用濾波器去除。
4) 實(shí)現(xiàn)非視距通信
這是紫外光通信相比激光通信而言一個(gè)非常突出的優(yōu)點(diǎn)。激光通信由于是直線距離的通信,在信道通路中不能有障礙物;而紫外線由于具有較強(qiáng)的散射作用,從而可以以非直線的方式傳播,自然也就可以繞過障礙物而實(shí)現(xiàn)非視距通信。
3.2 日盲紫外通信存在的問題
1) 通信速率有待提高
日盲紫外通信是低速率的通信系統(tǒng),但是通信業(yè)務(wù)要求在很短的時(shí)間里傳輸大量的信息,有時(shí)還要求傳輸高信息量的視頻和圖像信息,日盲紫外通信目前無法滿足這些需要。日盲紫外通信的低速率傳輸性還成為制約語(yǔ)音實(shí)時(shí)通信的瓶頸。要實(shí)現(xiàn)實(shí)時(shí)的語(yǔ)音通信,比較適用的編碼方法是混合編碼。然而,混合編碼的運(yùn)算復(fù)雜度最高,普通的處理器難以實(shí)現(xiàn)實(shí)時(shí)處理,就需要尋求一種具有優(yōu)異性能的處理器進(jìn)行編解碼運(yùn)算處理。語(yǔ)音的有效壓縮技術(shù)是另一個(gè)難題。要實(shí)現(xiàn)語(yǔ)音的有效壓縮,既要使其壓縮比大,滿足低速率實(shí)時(shí)通信的需要,又要在一定程度上保證語(yǔ)音的質(zhì)量,這就成為一個(gè)相互矛盾的問題。如何在兩者折中,需要根據(jù)系統(tǒng)的需要來選取算法和實(shí)現(xiàn)方案。
2) 通信距離需要擴(kuò)大
紫外線具有強(qiáng)烈的吸收特性,使得紫外線的傳播范圍不會(huì)太大,通常不會(huì)超過5km的半徑范圍。紫外線的這一特性可以使局域范圍的通信內(nèi)容不泄露給在遠(yuǎn)方監(jiān)聽的第三者,實(shí)現(xiàn)保密通信,但也限制了日盲紫外通信的通信距離。增強(qiáng)紫外光發(fā)射的強(qiáng)度,可以增加紫外光通信距離。可以設(shè)置紫外光通信中繼點(diǎn),就像無線發(fā)射塔一樣,把接收到的信號(hào)倍增后發(fā)射到另外的中繼點(diǎn),延伸通信的距離,實(shí)現(xiàn)日盲紫外通信高保密性和遠(yuǎn)距離傳輸?shù)挠袡C(jī)結(jié)合。
3) 要求新的調(diào)制和解調(diào)手段
利用日盲紫外光代替無線電作為傳輸介質(zhì),其調(diào)制和解調(diào)的手段和傳統(tǒng)通信系統(tǒng)有著很大的區(qū)別。傳統(tǒng)通信系統(tǒng)是將基帶電信號(hào)激發(fā)射頻電路,產(chǎn)生出無線電信號(hào);而日盲紫外通信系統(tǒng)卻需要用基帶電信號(hào)激發(fā)出光信號(hào),以滿足通信的需要。常用的電光調(diào)制技術(shù)都不太適合日盲紫外通信的要求,要建立實(shí)用的日盲紫外通信系統(tǒng)必須采用一種全新的調(diào)制和接收方式。
4 海上搜救
在海上搜救活動(dòng)中,救援時(shí)間是一個(gè)非常重要的指標(biāo),而就目前的海上搜救案例來說,大部分的搜救時(shí)間都花費(fèi)在了尋找遇險(xiǎn)人員的位置上。因此,對(duì)遇險(xiǎn)目標(biāo)迅速、精確地探測(cè)定位就是決定搜救工作成敗的關(guān)鍵。
盡管已有各種海上搜救技術(shù)(如表1所示),但當(dāng)定位范圍已縮小至數(shù)千米范圍內(nèi)時(shí),考慮到環(huán)境的復(fù)雜性,迅速、精確地找到落水人員依然十分困難。由于海上搜救領(lǐng)域的要求較高,對(duì)海上搜救技術(shù)的需求也越來越高,尤其是在復(fù)雜環(huán)境下對(duì)精確性、時(shí)效性、安全穩(wěn)定性方面有跨越式創(chuàng)新的產(chǎn)品需求更為迫切。

表1 各種海上搜救技術(shù)性能比較
定位技術(shù)的另一個(gè)發(fā)展方向是成像技術(shù)。成像技術(shù)是一種直觀可靠、可以迅速對(duì)遇險(xiǎn)目標(biāo)進(jìn)行形象直觀定位的技術(shù)。
日盲紫外波段由于地表不存在任何背景干擾,可全天時(shí)、全天候被探測(cè),因此系統(tǒng)可輕松獲得海上搜救目標(biāo)位置,是海上搜救的最佳光學(xué)手段。美國(guó)雷神公司于2010年申請(qǐng)了使用日盲紫外信號(hào)進(jìn)行海上搜救的發(fā)明專利,該專利是通過在救生衣和漂浮物上安裝日盲紫外信標(biāo)光源的方法,在遇險(xiǎn)人員落水時(shí)打開光源,之后救援人員在搜救船或飛機(jī)上使用日盲紫外成像器件成像,定位遇險(xiǎn)人員。
目前國(guó)內(nèi)相關(guān)單位也開展了相關(guān)研制工作,進(jìn)行了物理仿真實(shí)驗(yàn)。圖5所示為實(shí)驗(yàn)實(shí)時(shí)數(shù)據(jù)截圖,驗(yàn)證了紫外探測(cè)器的性能以及圖像解算算法的可行性等,取得了良好的效果。

圖5 實(shí)時(shí)圖像采集與解算
日盲紫外搜救系統(tǒng)主要由兩部分組成,分別為信標(biāo)和成像儀。
信標(biāo)的作用是提供日盲紫外光信號(hào),供日盲紫外成像儀對(duì)其成像。日盲紫外信標(biāo)可放置在救身衣肩上或漂浮物上,如圖6所示,利用海水的導(dǎo)電性在落水時(shí)自動(dòng)開啟并發(fā)出日盲紫外救援信號(hào)。
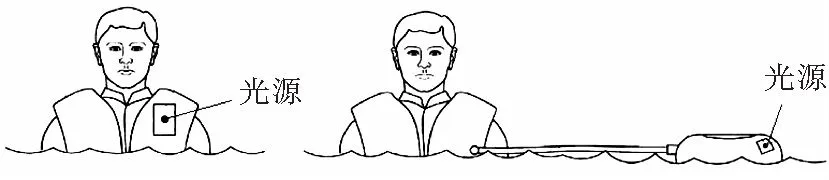
圖6 日盲紫外信標(biāo)安裝示意圖
日盲紫外成像儀主要由日盲通道和可見光通道組成,包含后續(xù)圖像處理和顯示模塊,如圖7所示。

圖7 日盲紫外成像儀內(nèi)部結(jié)構(gòu)
圖像分析從圖像的獲取開始,到圖像的識(shí)別與解釋,并最終得出結(jié)果,結(jié)果以圖形、數(shù)據(jù)等形式表示,如圖8所示。在這個(gè)過程中,由多種數(shù)學(xué)模型和算法實(shí)現(xiàn)的知識(shí)庫(kù)起著至關(guān)重要的作用。
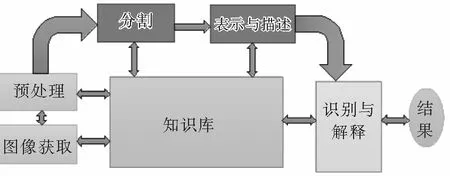
圖8 圖像分析系統(tǒng)的構(gòu)成
5 著艦引導(dǎo)
隨著艦載無人機(jī)的發(fā)展,無人機(jī)自動(dòng)著艦導(dǎo)引技術(shù)也快速發(fā)展。目前,以美國(guó)為首的軍事強(qiáng)國(guó)主要將GPS、艦載跟蹤雷達(dá)與多傳感器光電引導(dǎo)三種設(shè)備用于艦載無人機(jī)自動(dòng)著艦引導(dǎo)。
基于雷達(dá)的著艦引導(dǎo)系統(tǒng)測(cè)控過程復(fù)雜,定位精度有限,無法實(shí)現(xiàn)多機(jī)同時(shí)測(cè)控。基于導(dǎo)航衛(wèi)星的著艦引導(dǎo)系統(tǒng)易受攻擊,抗毀性差。
傳統(tǒng)光電著艦引導(dǎo)系統(tǒng)多采用可見光、紅外,易受氣象條件和背景環(huán)境影響。與傳統(tǒng)光電著艦引導(dǎo)系統(tǒng)相比,日盲紫外成像著艦引導(dǎo)系統(tǒng)作為一種新型光電著艦引導(dǎo)系統(tǒng),引導(dǎo)精度高,目標(biāo)特征明顯,抗干擾能力強(qiáng),選擇性好,正不斷被關(guān)注。
日盲紫外導(dǎo)引系統(tǒng)分為日盲紫外成像機(jī)載設(shè)備與艦面導(dǎo)引標(biāo)識(shí)兩部分。其中,日盲紫外成像機(jī)載設(shè)備主要由日盲紫外成像模塊、圖像處理模塊、供電與機(jī)載云臺(tái)和控制模塊組成。艦面導(dǎo)引標(biāo)識(shí)提供日盲紫外成像導(dǎo)引算法所需的、按照預(yù)定圖案排布的日盲紫外光信號(hào)陣列。以無人直升機(jī)為例,系統(tǒng)工作原理如圖9所示。艦面導(dǎo)引紫外信標(biāo)位于水面艦艇平臺(tái),其發(fā)出的日盲紫外光信號(hào)被無人機(jī)上的置于吊艙中的紫外成像模塊捕捉,經(jīng)圖像處理模塊得出機(jī)載相對(duì)位置與姿態(tài)數(shù)據(jù),無人直升機(jī)飛控系統(tǒng)利用這些數(shù)據(jù)進(jìn)行著艦導(dǎo)引飛行控制。
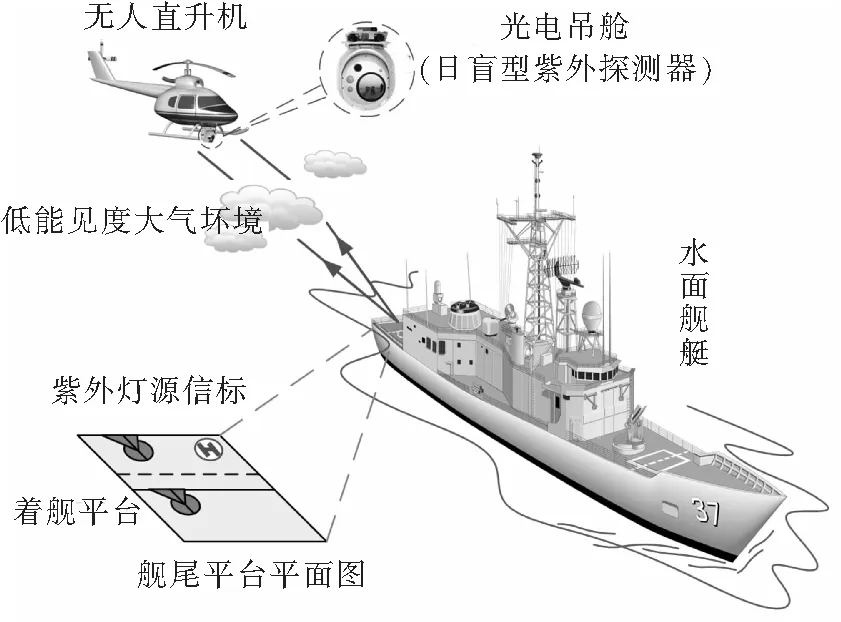
圖9 無人直升機(jī)日盲紫外成像導(dǎo)引原理圖
日盲紫外導(dǎo)引系統(tǒng)工作流程框圖如圖10所示。
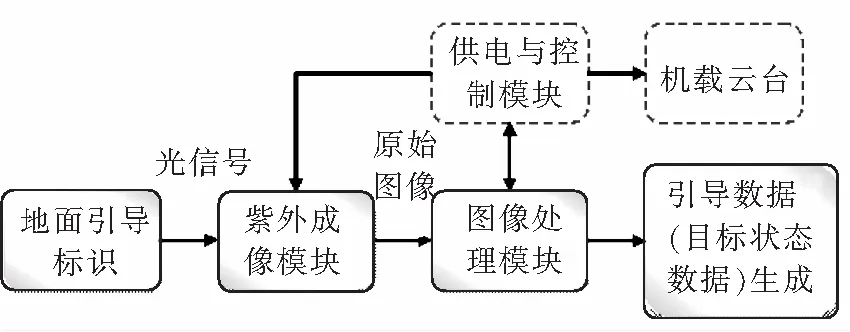
圖10 系統(tǒng)工作流程框圖
無人直升機(jī)在飛行過程中,可能因?yàn)樽藨B(tài)和方位的原因,地面導(dǎo)引標(biāo)識(shí)偏出日盲紫外成像模塊視野,此時(shí)圖像處理模塊識(shí)別地面導(dǎo)引標(biāo)識(shí)的偏差量,反饋至機(jī)載云臺(tái)伺服機(jī)構(gòu),云臺(tái)迅速調(diào)整日盲紫外成像模塊的光軸方位角,在導(dǎo)引過程中將地面導(dǎo)引標(biāo)識(shí)維持在日全盲紫外成像模塊的視場(chǎng)中央。
日盲紫外成像技術(shù)應(yīng)用于無人機(jī)著艦導(dǎo)引,關(guān)鍵在于高性能的目標(biāo)狀態(tài)識(shí)別機(jī)制和算法。目前國(guó)內(nèi)外對(duì)基于計(jì)算機(jī)視覺的無人機(jī)著陸導(dǎo)引算法已經(jīng)有了一定的基礎(chǔ),如使用“F”型信標(biāo),使得系統(tǒng)從空中各個(gè)方位角拍攝得到的圖案不同,實(shí)現(xiàn)360°無死角。圖11所示即為信標(biāo)圖案,信標(biāo)的尺寸d1=7m,d2=7m,d3=1.75m,并且演示模擬了同一距離不同視角以及同一視角不同距離情況下,紫外成像系統(tǒng)探測(cè)得到的信標(biāo)圖案。由于紫外成像系統(tǒng)在空間不同位置處探測(cè)到的圖案各不相同,根據(jù)成像特性反推即可得到無人機(jī)相對(duì)于信標(biāo)(即艦船)的方位信息。

圖11 信標(biāo)視場(chǎng)角變換視場(chǎng)示意圖
根據(jù)信標(biāo)坐標(biāo)系統(tǒng)xwywzwow和無人機(jī)坐標(biāo)系統(tǒng)xoyozooo之間的關(guān)系,通過控制無人機(jī)的運(yùn)動(dòng)方向進(jìn)行自動(dòng)著艦。信標(biāo)坐標(biāo)系統(tǒng)和無人機(jī)坐標(biāo)系統(tǒng)的4個(gè)參數(shù)為無人機(jī)的偏航角Ω、俯仰角α、旋轉(zhuǎn)角φ以及兩坐標(biāo)系原點(diǎn)之間的距離向量T。圖12為坐標(biāo)系之間的映射關(guān)系。兩坐標(biāo)系原點(diǎn)之間的距離向量T的示意圖如圖12(a)所示。無人機(jī)偏航角Ω、俯仰角αD、旋轉(zhuǎn)角φ分別如圖12(b)、(c)、(d)所示。光電著艦導(dǎo)引的目標(biāo)是將世界坐標(biāo)系轉(zhuǎn)到和無人機(jī)坐標(biāo)系重合。將世界坐標(biāo)系繞zw軸旋轉(zhuǎn)一定的角度Ω,使無人機(jī)坐標(biāo)系yo軸在xwowyw上的投影同

圖12 光電著艦導(dǎo)引坐標(biāo)系之間的映射關(guān)系
yw平行,獲取偏航角Ω,如圖12(b)所示(虛線坐標(biāo)表示旋轉(zhuǎn)之前的坐標(biāo)軸,而實(shí)線坐標(biāo)則表示旋轉(zhuǎn)完成之后的坐標(biāo)軸)。之后,在上一次旋轉(zhuǎn)的基礎(chǔ)上,將世界坐標(biāo)系繞新的xw旋轉(zhuǎn)α角,使無人機(jī)坐標(biāo)系yo軸同yw平行,獲取俯仰角α,如圖12(c)。同理,在上次旋轉(zhuǎn)的基礎(chǔ)上,將世界坐標(biāo)系繞新的yw軸旋轉(zhuǎn)φ角,使zw與zo平行即可,獲取旋轉(zhuǎn)角φ,如圖12(c)。根據(jù)兩坐標(biāo)系的變換規(guī)則,即可通過旋轉(zhuǎn)變換矩陣直接確定世界坐標(biāo)與無人機(jī)坐標(biāo)之間的關(guān)系。采用坐標(biāo)映射求解無人機(jī)相對(duì)于信標(biāo)姿態(tài)的流程圖如圖13[5]。
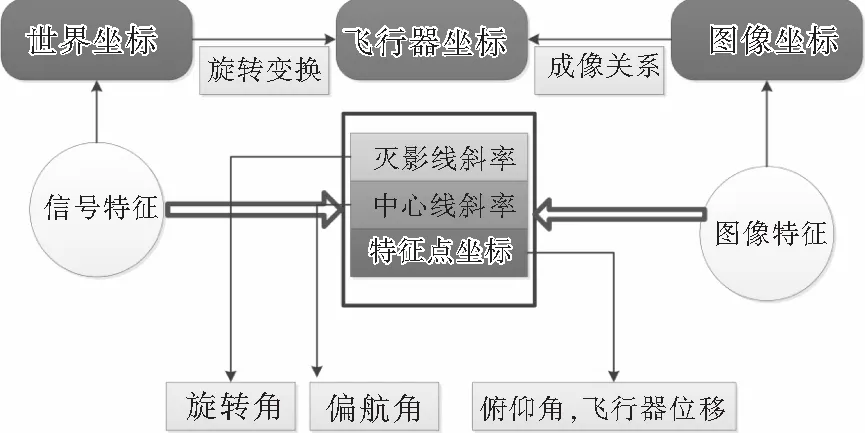
圖13 采用坐標(biāo)映射求解無人機(jī)相對(duì)于信標(biāo)姿態(tài)的流程圖
6 結(jié)束語(yǔ)
隨著日盲紫外探測(cè)技術(shù)的發(fā)展,其在軍事上的應(yīng)用也越來越多,美國(guó)已在海陸空各軍兵種中都有應(yīng)用,未來很可能會(huì)和紅外應(yīng)用技術(shù)一樣,在軍事裝備和其它領(lǐng)域的設(shè)備中得到更廣泛的應(yīng)用。日盲紫外探測(cè)技術(shù)的發(fā)展不僅在國(guó)防上有著十分重大的意義,在眾多民用領(lǐng)域的應(yīng)用價(jià)值也是十分巨大的。所以,國(guó)內(nèi)相關(guān)單位應(yīng)該緊緊抓住時(shí)機(jī),進(jìn)行更高層次的研究,探索和掌握先進(jìn)技術(shù),開發(fā)出性能更好的產(chǎn)品。相信在不遠(yuǎn)的將來,不僅在軍事應(yīng)用領(lǐng)域會(huì)有紫外技術(shù)的國(guó)產(chǎn)設(shè)備裝備部隊(duì),同時(shí)在公安、安全、消防以及相關(guān)領(lǐng)域中也會(huì)有相應(yīng)的紫外技術(shù)國(guó)產(chǎn)設(shè)備出現(xiàn)。
[1] 郝曉劍,李仰軍,劉 吉,等.光電探測(cè)技術(shù)與應(yīng)用[M].北京:國(guó)防工業(yè)出版社,2009,1-6,18-20.
[2] 安毓英,曾曉東,馮喆珺.光電探測(cè)與信號(hào)處理[M].北京:科學(xué)出版社,2010,1-7.
[3] 付 偉.導(dǎo)彈逼近紫外告警技術(shù)的發(fā)展[J].光機(jī)電信息,2002,19(8):26-29.
[4] 藍(lán) 天,倪國(guó)強(qiáng).紫外通信的大氣傳輸特性模擬研究[J].北京理工大學(xué)學(xué)報(bào),2003,23(4):419-423.
[5] 張志勇.飛行目標(biāo)位置和姿態(tài)光電測(cè)量技術(shù)的研究與應(yīng)用[D].成都:電子科技大學(xué)博士學(xué)位論文,2008,4-6.
Military Applications of the Blind Ultraviolet Detection Technology
XIAN Yong1,LAI Shuiqing2
(1.Wuhan Military Representative Bureau of Navy Equipment Department, Wuhan 430064, China; 2.China Helicopter Research and Development Institute, Jingdezhen 333001, China)
This article discussed the principle, function and composition of the blind ultraviolet detection. The analysis and research focused on the military applications of the blind ultraviolet detection technology , such as missile approach warning, communication, maritime search and rescue, UAV automatic carrier landing guidance, etc.
blind ultraviolet detection;military application
2016-02-26 作者簡(jiǎn)介:鮮 勇(1974-),男,四川巴中人,碩士,高工,研究方向:光電子技術(shù)及自動(dòng)控制。
1673-1220(2016)02-067-06
V243.5
A
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
