基于視頻解析的高速公路車輛測速研究
2016-03-04 09:30:54強添綱吳占紅歐陽冬冬
森林工程 2016年1期
關鍵詞:高速公路
強添綱,林 雨,吳占紅,邵 平,歐陽冬冬
(1.東北林業大學 交通學院,哈爾濱 150040;2.富裕縣友誼民族學校,黑龍江 富裕 161200)
?
基于視頻解析的高速公路車輛測速研究
強添綱1,林雨1,吳占紅2,邵平1,歐陽冬冬1
(1.東北林業大學 交通學院,哈爾濱 150040;2.富裕縣友誼民族學校,黑龍江 富裕 161200)
摘要:為了精確地測量高速公路車輛的速度,降低高速公路車輛測速成本,文章提出了運動目標檢測算法,并自主驗證并開發出了一種基于視頻解析的高速公路多車輛的測速軟件。在該方法中,首先利用改進的背景差分法有效地提取前景目標;然后,利用“偽目標”消除方法,保留有效的運動目標;再次,通過卡爾曼跟蹤算法獲取有效目標的運動軌跡;最后,通過攝像機標定獲取運動目標單位時間內行駛的實際距離。經過驗證算法有效的提高了車輛檢測的精度,有著較好的參考價值。軟件實現了高速公路車輛超速預警及事故責任認定的智能化,使事故認定更加科學準確。軟件為高速公路工作人員處理交通事故提供了輔助決策軟件,提高了硬件設備的利用率并減少了人力,具有良好的經濟效益和社會效益。
關鍵詞:智能交通;視頻解析;測速;高速公路
引文格式:強添綱,林雨,吳占紅,等.基于視頻解析的高速公路車輛測速研究[J].森林工程,2016,32(1):68-71.
0引言
高速公路是交通運輸和國家現代化的重要標志。據統計,高速公路發生的交通事故中,有超過70%的都是由于超速引起的[1-3]。大量的超速行為,給高速公路的行車安全造成了極大隱患。智能交通系統(ITS)的任務之一是監督高速公路車輛速度等運行狀況,為車輛運行管理提供信息和依據,達到限制車輛超速的目的[4-8]。因此,精確地測量高速公路車輛速度,可以有效減少交通事故和保障行車安全。
目前,基于視頻解析的車速測量技術成了國內外學者研究的熱點[9-14]。利用攝像機獲取數據不但安裝簡便、設置靈活,而且視頻檢測具有容易模塊化、集成化的優點,但視頻檢測也存在局限性,例如在大霧、陰雨天等條件下,視頻速度檢測是不適用的。基于視頻解析的實時測速方法是虛擬線圈測速法,在所拍攝的視頻圖像中的車道上,相距30~50 m處畫出兩個虛擬線圈,它利用車輛通過兩個虛擬線圈的時間得出其車輛運行速度。該方法簡單易行,不破壞路面,不更換線圈;但測速誤差大,并且一次僅能對一輛車進行測速[15-17]。
1算法原理
與傳統的測試方法相比,本文的主要特色是能實現多個運動目標的實時測速。本文的主要創新點如下。
1.1提出一個新的背景差分法—基于高斯濾波的雙閾值背景差分法
與傳統的背景差分法相比,這里提出的改進方法能有效地減少“空洞”和抑制噪聲。視頻測速會受到天氣、視頻的清晰度、拍攝角度等因素的影響,因此在運動目標檢測方面本文提出了一種新的背景差分法,提高了運動目標的檢測精度。改進算法的具體實施步驟如下。
(1)根據公式(1)獲取t時刻當前幀與背景差分后的圖像F(x,y,t)。
其中,I(x,y,t)為t時刻的圖像,Ib(x,y,t)是利用∑-Δ方法更新后的背景圖像;G(x,y)是均值為μ、方差為σ的二維高斯函數用于抑制圖像中的噪聲。
(2)根據公式(2)獲取基于高閾值的二值化圖像和低閾值的二值化圖像。

(2)
(3)根據公式(3)獲取基于低閾值的二值化圖像。

(3)
(4)為了實現程序的全自動化運行,定義Th和Tl表達式如公式(4)所示。

(4)
其中,μ1和σ1分別是F(x,y,t)中所有像素點的灰度值的均值和方差。
(5)聯合Fl(x,y)和Fh(x,y)獲取最終前景目標圖像f(x,y),通過圖1的(a)和(b)可以看出本算法的有效性。

圖1 對比圖Fig.1 Comparison charts
1.2提出一種“偽目標”消除算法
運動目標提取后,下一步則需要進行卡爾曼濾波。由于光照條件、噪聲等因素的影響,一個運動目標二值化后有可能斷裂為兩個面積不同的目標。該現象的出現會降低跟蹤精度,從而導致測速的不準確。針對該問題,本系統首先提出了一種基于面積選擇的“偽目標”消除算法。
本算法的核心思想是根據運動目標的面積確定該運動目標是否保留。因此本算法的關鍵問題是閾值的選擇,臨界值過大會屏蔽掉一些小型車輛,過小則失去了意義。假設ROI區域(檢測區域)面積,根據邊緣檢測獲得區域的面積為s。本項目在實現的過程中,S和s的值分別等于ROI中像素點的個數和邊緣檢測獲得區域面積內像素點的個數。它們的計算表達式如公式(5)所示。
(5)
其中,M和N分別是ROI區域中像素的行數和列數,m和n分別是利用邊緣檢測獲取的區域內像素點的行數和列數。根據經驗,當s和S的比值小于0.16時,該運動目標應被忽略,否則,可以保留。通過圖2中(a)和(b)的對比,可以看出該算法的有效性。

圖2 對比圖Fig.2 Comparison charts
2軟件設計原理
在算法的基礎上,本文從實際出發,通過高速公路視頻驗證并開發應用軟件。本軟件主要包括3個功能模塊:視頻載入模塊、視頻解析模塊和車速計算模塊。軟件不但能實現高速公路上車輛的實時測速和預警,也能在交通事故分析中精確地獲取事故車輛的速度。軟件是在VC平臺上,借助OpenCV計算機視覺類庫通過C語言編程實現的,具體流程如圖3所示。

圖3 設計流程圖Fig.3 Flow chart of the design
2.1視頻載入模塊
功能:實現視頻的實時獲取、加載、顯示和存儲。
方法:主要是將OpenCV中的函數進行了集成,實現了視頻的實時獲取、加載、顯示和存儲。OpenCV類庫中集成了大量的計算機視覺函數及接口,在視頻載入時可調用OpenCV計算機視覺類庫cvCaptureFromAVI函數實現視頻的載入,由OpenCV函數庫中的cvShowImage函數進行逐幀圖像的顯示,形成視頻的播放。同樣在進行視頻的存儲時也是集成了OpenCV函數庫中的函數。
2.2視頻解析模塊
功能:①獲取讀入視頻的前景目標,②實現背景的實時更新,③視頻每幀圖像的二值化。視頻解析模塊界面如圖4所示。
原理:在視頻中運動的目標稱之為前景,其他的目標稱之為背景。視頻中的每一幀圖像與背景相減,剩余的就是前景目標。由于光照的影響,背景是不斷變化的。因此,為了實時有效地獲取前景目標,背景則需要實時更新。另外,為了提高后續處理工作的效率,獲取前景目標后需對其進行二值化。
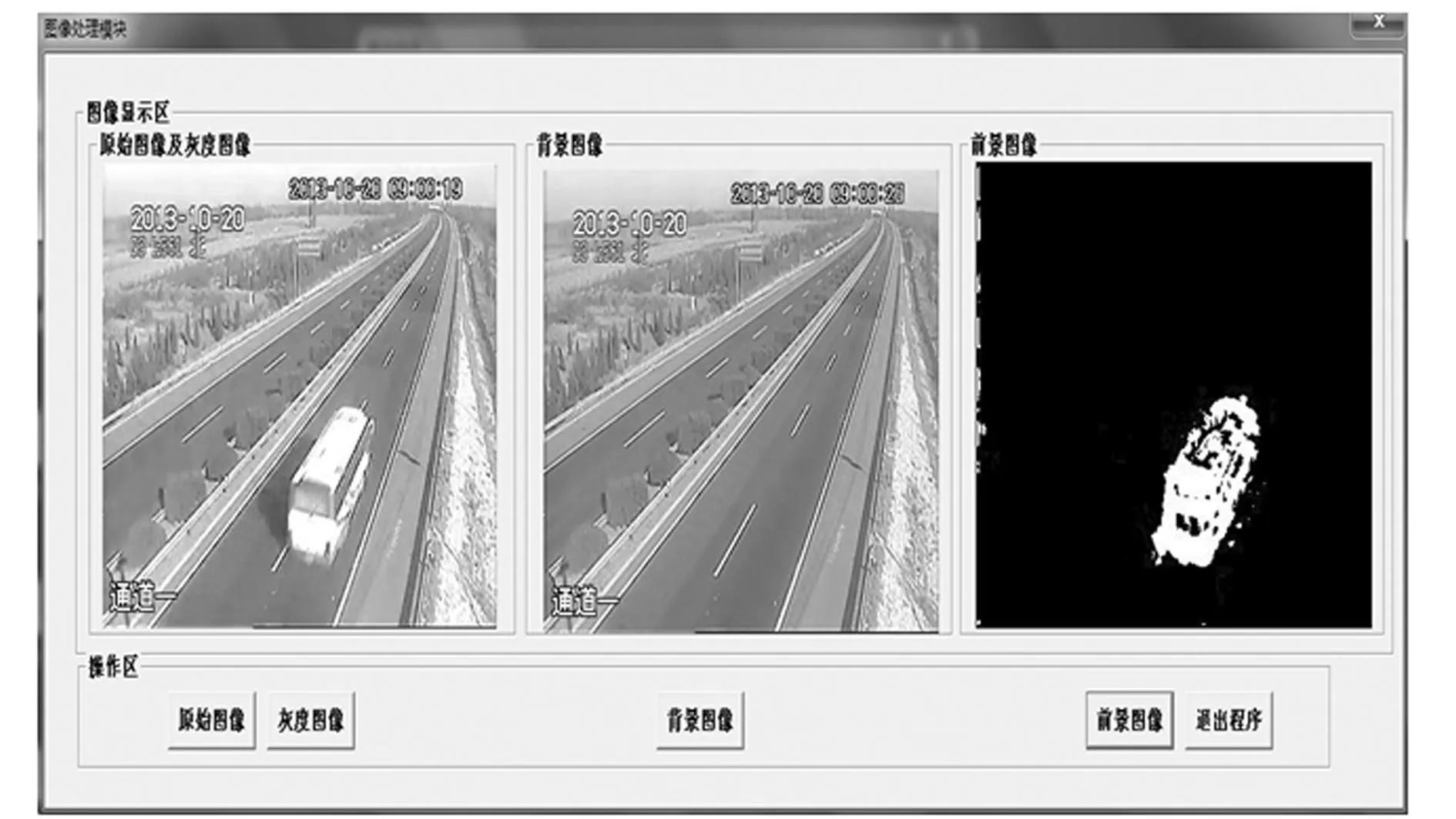
圖4 視頻解析模塊界面截圖Fig.4 Video parsing module interface
方法:利用基于高斯濾波的雙閾值差分法獲取前景目標(詳細的內容在第三部分介紹)。利用∑-△方法實現背景的更新,算法如公式(6):
Mt(x)=Mt-1(x)+sgn(It(x)-Mt-1(x))
(6)
其中,x為每幀圖像中的像素值;Mt(x)為t時刻更新后的背景圖像;Mt-1(x)為t-1時刻的圖像;It(x)當前幀圖像。通過圖5中(a)和(b)的比較可以看出∑-△方法的有效性。

圖5 對比圖Fig.5 Comparison chart
2.3車速計算模塊
功能:①實現運動目標的跟蹤,②車速的檢測和顯示。車速計算模塊界面如圖6所示。
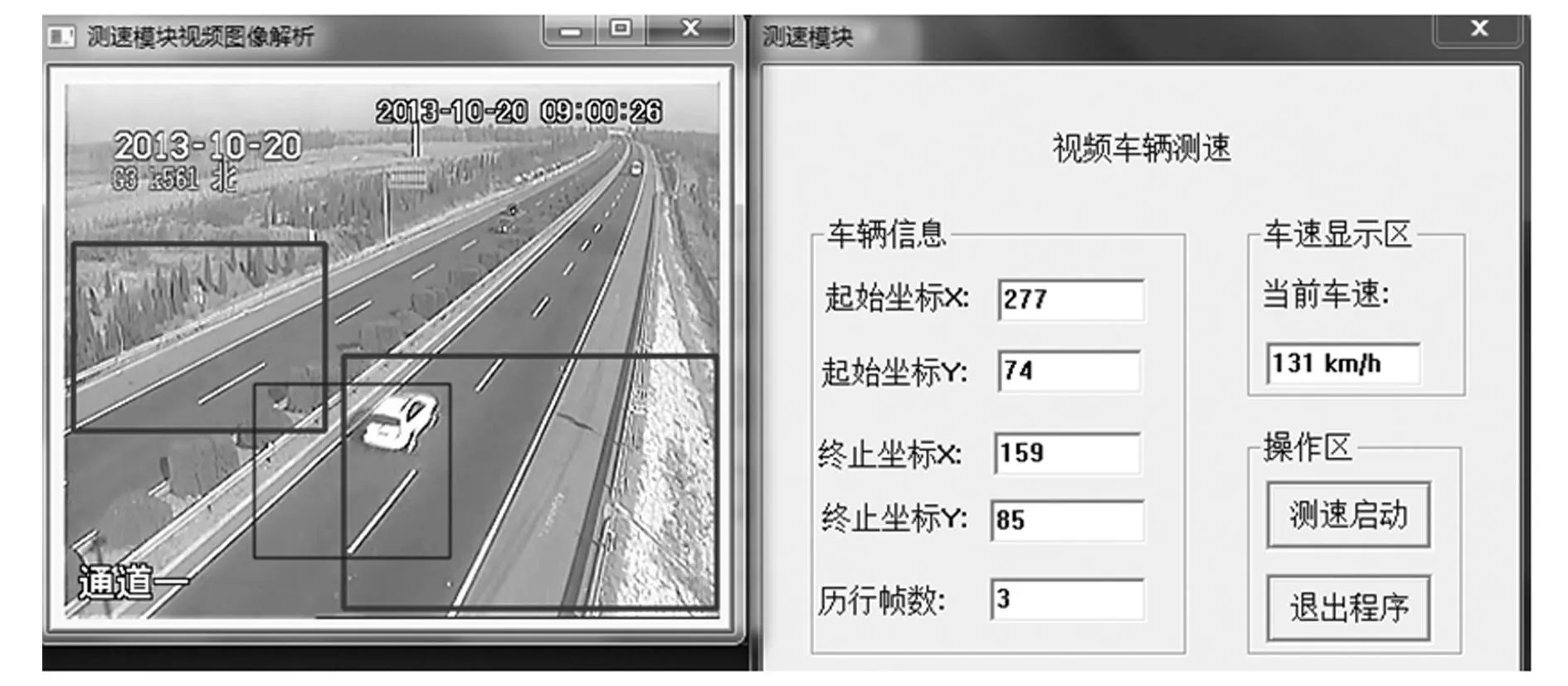
圖6 車速計算模塊界面截圖Fig.6 The interface of speed calculation module
原理:在獲取前景目標(車輛)的基礎上,利用卡爾曼濾波實現目標的跟蹤和獲取單位時間內目標(車輛)的運動距離,從而實現車速的檢測。
方法:利用卡爾曼濾波是實現目標的跟蹤;利用攝像機標定的方法,實現由圖像距離到物理距離的映射。卡爾曼濾波是用于時變線性系統的遞歸濾波器,因為兩幀圖像相差時間很短(1 s視頻由25幀圖像組成),因此可將運動目標看做勻速直線運動。在卡爾曼濾波跟蹤中,選取運動目標的質心坐標作為輸入量,通過遞歸方程實現運動目標的跟蹤。文章需要利用攝像機標定的方法,實現由圖像距離到物理距離的映射,具體步驟如下:
(1)利用卡爾曼濾波跟蹤計算出像素位移。卡爾曼濾波很好的實現了運動目標的跟蹤,從而確定了前后兩幀圖像中同一運動目標的坐標位置,通過坐標很容易獲得兩個運動目標的像素距離。
(2)借助某一目標的像素位移和實際位移標定出攝像機參數。在攝像機標定中,運動目標的像素位移、實際位移和攝像機參數有著特定的轉換方程。通過上一步得知運動目標的像素位移,在選取某一物體的實際坐標位置后代入方程可得到攝像機參數。
(3)由攝像機參數與實際位移對應關系實現測速。通過以上兩步得到了攝像機的參數,在利用攝像機參數與實際位移的對應關系得到運動目標的實際位移,從而獲得了單位時間內運動目標的速度。因此可知對于攝像參數的標定是至關重要的,其關系到位移測量的精確程度,進而影響最后的速度檢測。
3結束語
目前,高速公路中因車輛超速引起的事故頻發生,隨之產生的二次事故、事故責任認定問題尤為突出。對此,文章提出新的檢測算法,在實際視頻為基礎上以VC為開發平臺,借助OpenCV計算機視覺類庫開發此軟件。研究可在歸納為3個方面:
(1)將本軟件應用到高速公路,與現有的設施相結合,可實現高速公路的車輛的實時測速并發布超速預警信息。
(2)在發生事故后,利用本軟件分析視頻,準確計算出車輛在事故前后的速度并分析行為變化,實現事故責任的認定。
(3)隨著后期的研究,將實現流量統計、排隊長度檢測和交通事件檢測等功能的應用。
本文在提出運動目標檢測算法的前提下,對算法進行了實例驗證,并借助于計算機進行了軟件開發。研究可得,軟件實現了高速公路車輛超速預警及事故責任認定的智能化,使事故認定更加科學準確。軟件為高速公路工作人員處理交通事故提供了輔助決策軟件,提高了硬件設備的利用率并減少了人力,具有良好的經濟效益和社會效益。
【參考文獻】
[1]段建民,劉冠宇,鄭榜貴.基于視覺及多特征的前方車輛檢測算法[J].北京工業大學學報,2015,41(9):1326-1333.
[2]陳征,王飛,項煜.智能視頻分析技術在高速公路建設和管理中運用分析[J].中國科技信息,2015(1):72-74.
[3]支晨蛟.基于視頻的高速公路車速檢測和車輛跟蹤系統[D].杭州:浙江大學,2013.
[4]姚明明.高速公路隧道停車檢測中的車輛跟蹤及狀態識別方法研究[D].重慶:重慶大學,2014.
[5]張曉松,張波,金濤.高速公路ETC交易耗時估計與車道分區設計[J].公路工程,2014,39(4):78-81+85.
[6]邱凌赟,韓軍,顧明.車道模型的高速公路車輛異常行為檢測方法[J],計算機應用,2014,34(5):1378-1382.
[7]林立原,陳林.基于高斯混合模型和卡爾曼濾波的車輛檢測與跟蹤方法[J].武漢科技大學學報,2015,38(3):226-230.
[8]王迎,周燕.基于廣義線性模型的高速公路交通事故預測[J].公路工程,2015,40(5):115-119.
[9]鄧其,潘曉東,方青.基于可拓理論的高速公路事故動態預警方法[J].公路工程,2013,38(4):115-119.
[10]孫寧,張重德.一種提高視頻車速檢測精度的算法分析和實現[J].合肥工業大學學報,2014,37(12):1462-1468.
[11]江東,曾亞光.機動車視頻測速系統及主要問題分析[J].中國測試技術,2007,33(5):41-43.
[12]童劍軍.說說視頻測速[J].中國交通信息產業,2006(9):36-38.
[13]王海燕.視頻違章超速監測系統技術分析[J].32H中國交通信息產業,2006(8):110-112.
[14]王大鵬.區間測速系統的框架結構與功能設計[D].廣州:中山大學,2008.
[15]王健.視頻測速系統中的測距和攝像機標定研究[D].南昌:南昌大學,2008.
[16]鮮海瀅,李曉峰,李在銘.基于攝像機的車輛測速儀[J].電子測量與儀器學報,2008,22(3):94-99.
[17]秦武,基于機器視覺的高速公路車輛測速研究[D].宜昌:三峽大學,2011.
Research on the Measurement of Vehicle Speedon Highways Based on Video Analysis
Qiang Tiangang1,Lin Yu1,Wu Zhanhong2,Shao Ping1,Ouyang Dongdong1
(1.Traffic College,Northeast Forestry University,Harbin 150040;
2.Fuyu Friendship National School,Fuyu 161200,Heilongjiang Province)
Abstract:In order to measure the speed of vehicles in expressways accurately and reduce highway speed vehicle costs,a testing algorithm for moving objects was put forward and the corresponding software for measuring the vehicle speed in highways was designed based on video analysis.Firstly,the detection method of background subtraction was used to effectively extract the prospect goal;then,the method of “phony” elimination was adopted to keep effective kinetic target.Next,the target trajectory was acquired effectively through Kalman tracking algorithm;finally,the camera was used to calibrate the actual distance per unit time for the moving target.After verification,the accuracy of vehicle detection by the algorithm was effectively improved and the algorithm has a good reference value.The software can realize the intelligence of highway speeding warning and accident responsibility confirmation and the identification of accidents will be more scientific and accurate.For staff,the software has provided decision support to deal with traffic accidents and improve the utilization of hardware and decrease the use of manpower,which has good economic and social benefits.
Keywords:intelligent transportation;video parsing techniques;speed measurement;highway
作者簡介:第一強添綱,博士,教授。研究方向:寒地交通系統管理與控制技術。E-mail: qiangtg123@163.com
基金項目:黑龍江省博士后特別經費項目(LBH-TZ0501);國家自然科學基金項目(51405075)
收稿日期:2015-10-09
中圖分類號:S 714.8
文獻標識碼:A
文章編號:1001-005X(2016)01-0068-04
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
鴨綠江(2021年17期)2021-10-13 07:05:32
中國交通信息化(2020年8期)2021-01-26 00:51:18
中國交通信息化(2020年10期)2021-01-14 03:29:50
中國交通信息化(2019年6期)2019-08-23 08:28:40
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年3期)2017-06-08 06:09:23
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:08
