預(yù)測模糊控制在液化天然氣調(diào)峰系統(tǒng)的應(yīng)用
2016-03-07 07:38:00李富貴詹從來
工程設(shè)計學(xué)報 2016年1期
李富貴, 龍 偉, 羅 亮, 詹從來
(南昌大學(xué) 信息工程學(xué)院,江西 南昌 330031)
?
預(yù)測模糊控制在液化天然氣調(diào)峰系統(tǒng)的應(yīng)用
李富貴, 龍偉, 羅亮, 詹從來
(南昌大學(xué) 信息工程學(xué)院,江西 南昌 330031)
摘要:目前液化天然氣(LNG)汽化站通常將儲罐壓力調(diào)節(jié)和調(diào)峰技術(shù)分離,因此存在系統(tǒng)相對復(fù)雜、投入資金大等問題.通過論證研究,提出一種將儲罐壓力調(diào)節(jié)和調(diào)峰技術(shù)相結(jié)合的LNG汽化站控制系統(tǒng),并針對儲罐壓力系統(tǒng)因存在液氣轉(zhuǎn)換、大滯后、時變等特點(diǎn)而易失控的問題,以單值廣義預(yù)測模糊控制算法為核心,采用模糊控制進(jìn)行動態(tài)反饋補(bǔ)償?shù)目刂撇呗?結(jié)合DSP和FPGA器件高速數(shù)據(jù)處理的特點(diǎn),以達(dá)到儲罐壓力實(shí)時、精確控制的目的.系統(tǒng)實(shí)際運(yùn)行情況表明:該控制器具有調(diào)節(jié)快速、實(shí)時性好、魯棒性強(qiáng)等特點(diǎn);汽化站出口壓力波動不超過3.5%,實(shí)現(xiàn)了良好的調(diào)峰效果.該系統(tǒng)具有結(jié)構(gòu)簡單、抗干擾能力強(qiáng)、調(diào)峰效果好等特點(diǎn),為城市燃?xì)庹{(diào)峰提供了新思路.
關(guān)鍵詞:調(diào)峰; 預(yù)測模糊控制; 自增壓; 城市供氣; 壓力控制; 儲罐系統(tǒng)
天然氣作為一種清潔、高效、安全能源越來越受到青睞.由于天然氣用氣量會隨著時間的變化而出現(xiàn)大幅波動,城市管網(wǎng)供氣易出現(xiàn)氣壓不穩(wěn)甚至停氣的現(xiàn)象,因此調(diào)峰設(shè)施的建設(shè)必不可少.液化天然氣(liquefied natural gas,LNG)汽化站是一種快速靈活、高安全性的城市燃?xì)庹{(diào)峰系統(tǒng),對城市管道燃?xì)庹{(diào)峰具有重要意義[1-3].
LNG汽化站實(shí)現(xiàn)調(diào)峰通常需要對LNG儲罐內(nèi)壓力和出口壓力進(jìn)行控制,國內(nèi)外對LNG站儲罐內(nèi)壓力的調(diào)節(jié)主要采用Bang-Bang算法控制增壓閥的開閉,使得儲罐壓力維持在設(shè)定的閾值范圍內(nèi),同時,通過采用壓縮機(jī)或低溫泵進(jìn)行增壓[4],實(shí)現(xiàn)出口壓力的控制.這種調(diào)峰方式將兩者分離,增加了系統(tǒng)復(fù)雜度和故障率,增加了成本投入.
儲罐系統(tǒng)涉及氣液轉(zhuǎn)換、儲罐內(nèi)氣體動態(tài)混合和熱交換以及汽化器和外界空間的傳熱過程,因此該系統(tǒng)具有大滯后、非線性、強(qiáng)耦合的特點(diǎn).此外,儲罐內(nèi)壓力還受液體充裝率、增壓氣體溫度等因素影響,系統(tǒng)模型難以建立且易變[5].傳統(tǒng)的PID控制器對這種非線性、強(qiáng)耦合系統(tǒng)難以達(dá)到良好的控制效果,雖然結(jié)合大林算法、Smith預(yù)估算法等可提升控制效果,但此類算法都需要精確的控制模型[6].預(yù)測控制采用多步預(yù)測、滾動優(yōu)化和反饋校正等控制策略,具有控制效果好、魯棒性強(qiáng)等特點(diǎn),適用于不易建立精確數(shù)學(xué)模型且復(fù)雜的工業(yè)過程控制[7].
本文提出一種通過LNG儲罐自增壓法對LNG汽化儲配站出口壓力進(jìn)行調(diào)節(jié)的方案,將LNG儲罐自增壓壓力調(diào)節(jié)直接應(yīng)用到LNG出口壓力的調(diào)節(jié)上,同時針對LNG汽化站出口壓力系統(tǒng)具有大滯后、時變、非線性、易受隨機(jī)因素干擾等特點(diǎn),采用先進(jìn)的預(yù)測模糊控制算法進(jìn)行出口壓力控制,從而保證了LNG汽化站出口壓力的穩(wěn)定和良好的調(diào)峰效果,降低了投入產(chǎn)出比.
1LNG汽化站系統(tǒng)
目前LNG汽化站采用壓縮機(jī)或低溫泵對出口壓力進(jìn)行調(diào)節(jié).本課題采用儲罐自增壓方式對出口壓力進(jìn)行直接控制,系統(tǒng)結(jié)構(gòu)框圖如圖1,其主要有LNG卸車增壓、儲罐自增壓調(diào)壓、BOG回收、計量加臭裝置等功能.
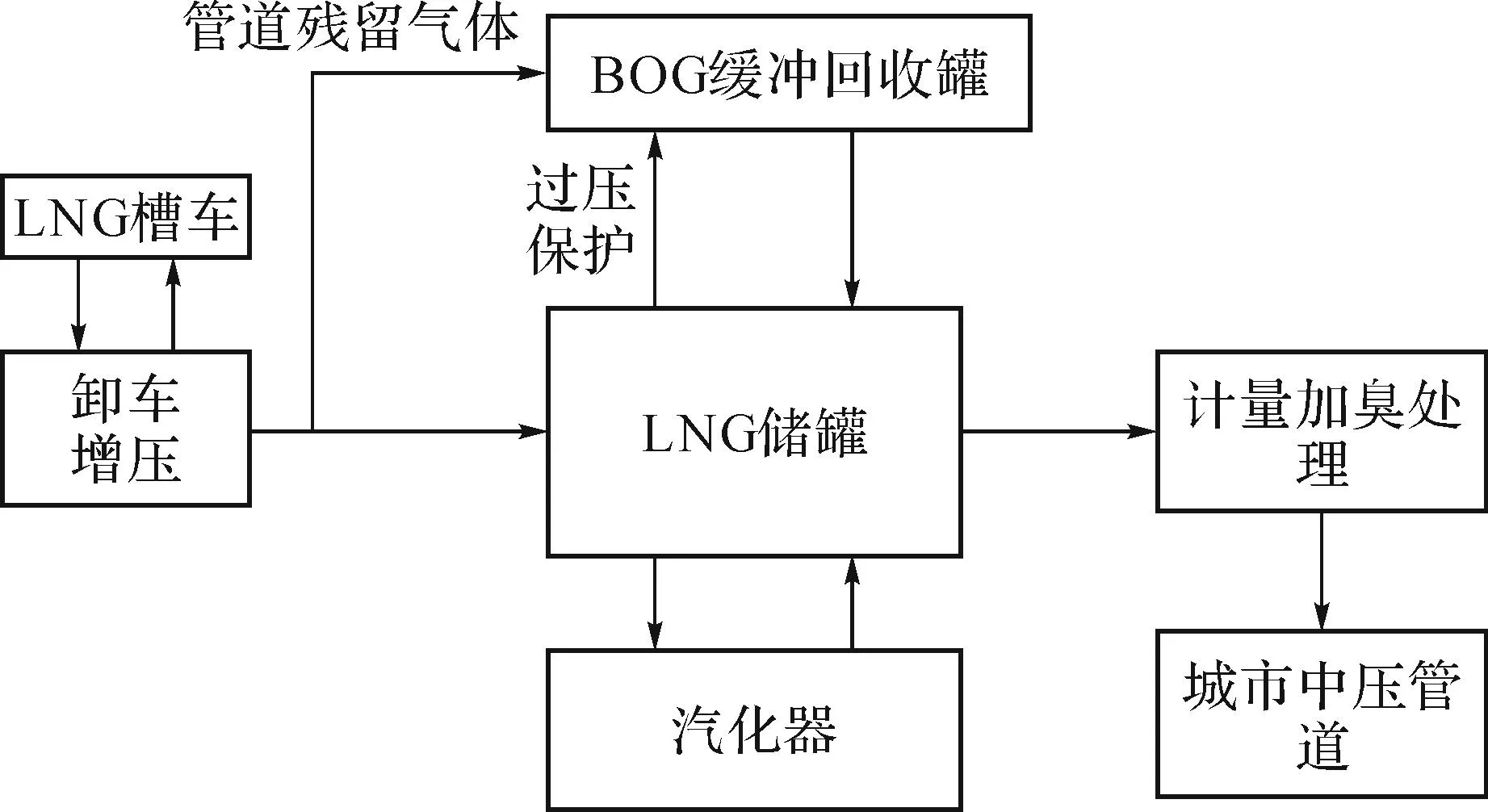
圖1 LNG汽化站系統(tǒng)簡化框圖Fig.1 The simplified block diagram of LNG gasification station system
1.1自增壓原理
自增壓原理圖如圖2所示,采用2種汽化器相結(jié)合的方式對液化天然氣進(jìn)行汽化處理,環(huán)境溫度較高時采用空溫汽化方式,溫度低時采用熱蒸汽汽化方式.由于汽化器低于儲罐最低液面,LNG可通過重力作用流入其中,LNG在汽化器中與大氣/蒸汽進(jìn)行熱交換,實(shí)現(xiàn)汽化.氣體通過增壓閥回到LNG儲罐,從而實(shí)現(xiàn)儲罐自增壓的目的.
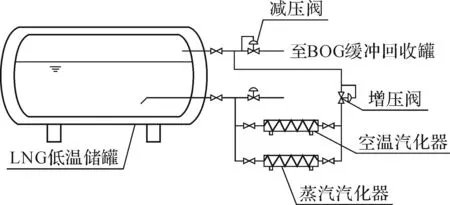
圖2 自增壓原理圖Fig.2 The principle diagram of self-pressurization
此外可通過減壓閥來降低異常增加的壓力,保證儲罐安全.儲罐自增壓法調(diào)節(jié)LNG出口壓力方式為:將儲罐增壓閥作為執(zhí)行機(jī)構(gòu),控制器輸出的控制量調(diào)節(jié)增壓閥開度,從而實(shí)現(xiàn)對LNG出口壓力的控制.
2控制系統(tǒng)的設(shè)計
2.1系統(tǒng)控制指標(biāo)
系統(tǒng)控制指標(biāo)為:
1)汽化站輸出總管壓力為0.35 MPa.
2)出口壓力波動小于3.5%.
3)系統(tǒng)響應(yīng)速度大于0.05 MPa/min.
2.2控制系統(tǒng)組成
本課題采用基于工控機(jī)和PLC的二級控制系統(tǒng)方案.第1級以研祥IPC-810B工控機(jī)作為頂層硬件控制平臺,采用組態(tài)軟件Kingview 6.55作為上位機(jī)軟件開發(fā)平臺,實(shí)現(xiàn)數(shù)據(jù)分析、系統(tǒng)運(yùn)行監(jiān)控、人機(jī)操作、故障報警等功能.第2級以三菱公司Q系列PLC實(shí)現(xiàn)數(shù)據(jù)采集、底層驅(qū)動控制,通過工業(yè)以太網(wǎng)實(shí)現(xiàn)與上位機(jī)的數(shù)據(jù)傳輸.
2.3控制器的設(shè)計
本課題采用廣義單值預(yù)測控制器調(diào)節(jié)汽化站出口壓力,并根據(jù)預(yù)測誤差特性進(jìn)行模糊推理補(bǔ)償,以彌補(bǔ)傳統(tǒng)預(yù)測控制算法在系統(tǒng)信息處理上的不足.
2.3.1廣義單值預(yù)測控制器的設(shè)計
對于物理可實(shí)現(xiàn)的被控對象,總可以構(gòu)造出CARIMA模型[8],由于LNG汽化站出口壓力系統(tǒng)具有大滯后的特點(diǎn),故用CARIMA模型表述被控對象,為:

(1)

(2)
其中:z-1是后移算子;Δ=1-z-1是差分算子;d表示滯后時間;A(z-1),B(z-1)和C(z-1)為后移算子的多項(xiàng)式;ξ(t)表示隨機(jī)噪聲序列.為了簡化算法這里假定C(z-1)=1.
引入Diophantine方程:

(3)


(4)

上式右邊第3項(xiàng)為噪音增量,可看成預(yù)測誤差,所以j步導(dǎo)前最優(yōu)預(yù)測輸出為

Fj(z-1)y(k).
(5)
若忽略模型估計誤差的影響,即可認(rèn)為

在式(5)中,右邊第1項(xiàng)包含未來項(xiàng)和已知項(xiàng),對于j步導(dǎo)前輸出預(yù)測,有
yp((k+p+d)/k)=G1,0Δu(k+j-1)+
G2,1Δu(k+j-2)+…+
Gj,j-1Δu(k)+Gj,jΔu(k-1)+
…+Gj,nB+j-1Δu(k-nB)+
Fj(z-1)y(k).
(6)
通常預(yù)測控制器的輸出是多個預(yù)測值計算出的最優(yōu)控制值,需要正確選擇預(yù)測步數(shù)p和控制作用計算步數(shù)m,還要確定最優(yōu)指標(biāo)中的加權(quán)陣,這就使得計算最優(yōu)控制率效率低下,難以達(dá)到實(shí)時控制的效果[9].本文選用單值廣義預(yù)測控制,即只用未來某一時刻的預(yù)測值來求解當(dāng)前控制作用,其相應(yīng)的控制步數(shù)只取1步,可以得到與多步預(yù)測控制相同的調(diào)節(jié)性能,因此計算量只是廣義預(yù)測控制的幾分之一,有利于實(shí)現(xiàn)實(shí)時控制.預(yù)測時域長度只取j=N一步,控制時域長度取Nu=1,即有
yp((k+p+d)/k)=Gp,p-1Δu(k)+Gp,pΔu(k-1)+
…+Gp,nB+p-1Δu(k-nB)+
Fj(z-1)y(k)=
Fp(z-1)Δu(k)+Fj(z-1)y(k),
(7)
式中:Fp(z-1)=Gp,p-1+Gp,pz-1+…+Gp,nB+p-1z-nb.
最優(yōu)預(yù)測控制律可運(yùn)用加權(quán)二次型性能指標(biāo)求得:

(8)
將(7)式代入(8)式,并對u(k)求導(dǎo),化簡后得
Δu(k)=(Fp(z-1)+∧/QGp,p-1)
[yr(k+d+p)-Fj(z-1)y(k)].
(9)
將(4)式轉(zhuǎn)化為最小二乘式形式,得:
y(k+j)=φTθj+ε(k+j),
(10)
φT=[yT(k),…,yT(k-na),ΔuT(k+j-1),…,ΔuT(k-nb)]T,
(11)

(12)
因此單值預(yù)測控制過程為將測量值和給定值組成觀測數(shù)據(jù)矩陣φT(k-j),再運(yùn)用最小二乘法辨識得到式(4)的參數(shù)θj并根據(jù)式(10)求得y(k+j),最后通過式(9)計算出控制量u(k).
2.3.2二維模糊控制器的設(shè)計
模糊控制器主要由模糊化接口、規(guī)則庫、模糊推理、清晰化接口等部分組成[10-11],控制器結(jié)構(gòu)如圖3.輸入量選用受控變量和輸入給定的偏差e和偏差變化ec.將偏差e和偏差變化ec以及控制量U分為5個模糊集{NB,NS,Z,PS,PB},本文采用三角形隸屬度函數(shù)描述偏差e和偏差變化ec的模糊集合.
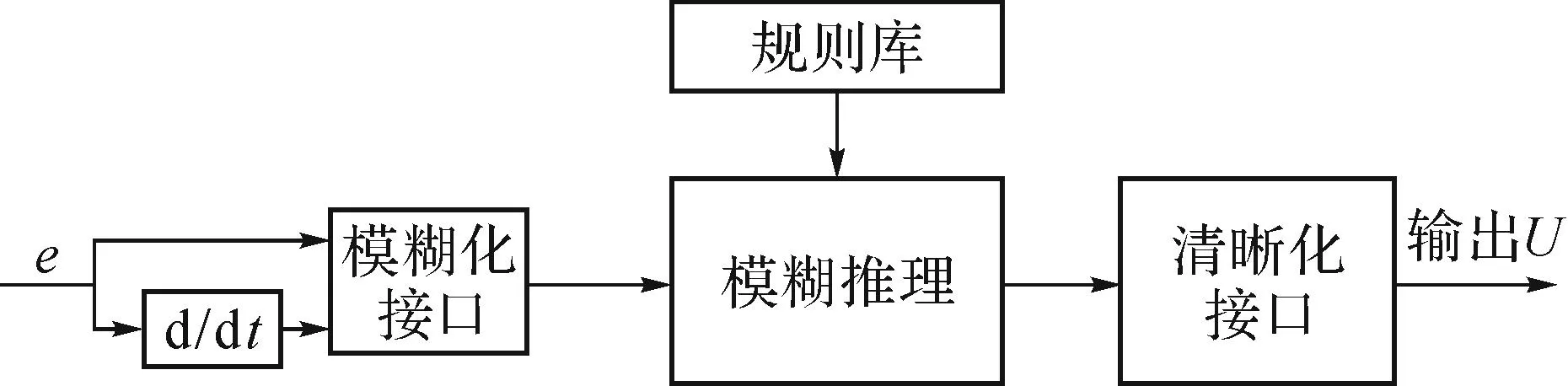
圖3 二維模糊控制器結(jié)構(gòu)圖Fig.3 The structure diagram of two-dimensional fuzzy controller
模糊規(guī)則是基于專家知識或手動操作人員長期積累的經(jīng)驗(yàn),按人的直覺推理的一種語言表示形式[12-13].根據(jù)預(yù)測誤差的歷史數(shù)據(jù)和儲罐壓力變化的特性,模糊規(guī)則需遵循如下規(guī)律:
1)當(dāng)偏差e較大時,應(yīng)增大控制量,以加快系統(tǒng)響應(yīng)速度.
2)當(dāng)偏差的絕對值|e|較小且偏差變化率ec負(fù)向較大時,為了減小超調(diào)量,應(yīng)當(dāng)減小控制量.
3)當(dāng)偏差和偏差變化率的絕對值均很小時,應(yīng)減小輸出,削弱模糊補(bǔ)償作用,減小震蕩.
根據(jù)以上規(guī)律,并結(jié)合工程操作人員的經(jīng)驗(yàn)知識,建立的模糊規(guī)則表如表1.
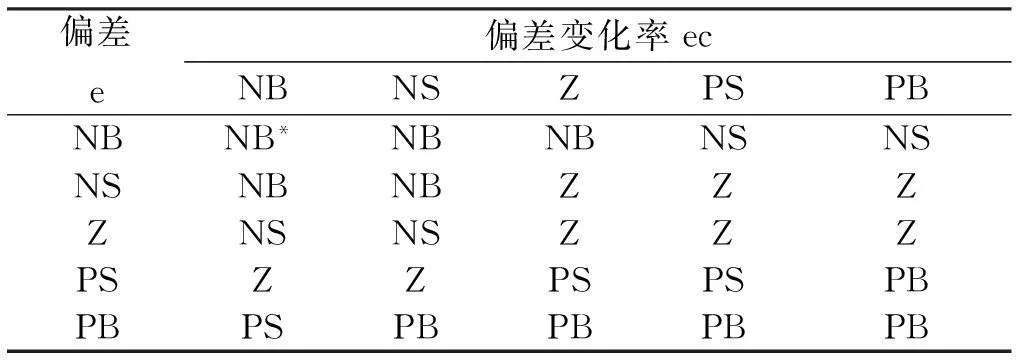
表1 自增壓壓力模糊規(guī)則表
根據(jù)Mamdani推理法,表1中第*條規(guī)則的關(guān)系矩陣為(NBe×NBec)T1°NBu,T1為列向量轉(zhuǎn)換.
模糊控制器的模糊關(guān)系R是所有模糊規(guī)則的關(guān)系矩陣的并集,即
R=R1∪R2∪……∪Rm×n.
(13)
模糊控制器的輸出為誤差向量e以及誤差變化率向量ec和模糊關(guān)系的合成,即U=(e×ec)°R.
本文采用加權(quán)平均法(式(14))對控制器輸出進(jìn)行反模糊化,并可根據(jù)預(yù)測誤差特點(diǎn)調(diào)節(jié)系數(shù)Ki以提高預(yù)測精度,
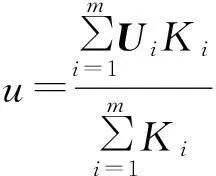
(14)
2.3.3廣義預(yù)測模糊控制器的設(shè)計
廣義預(yù)測模糊控制器采用高層模糊控制單元作為輔助單元進(jìn)行閉環(huán)優(yōu)化補(bǔ)償[14-16].預(yù)測模糊控制器的結(jié)構(gòu)框圖如圖4所示.
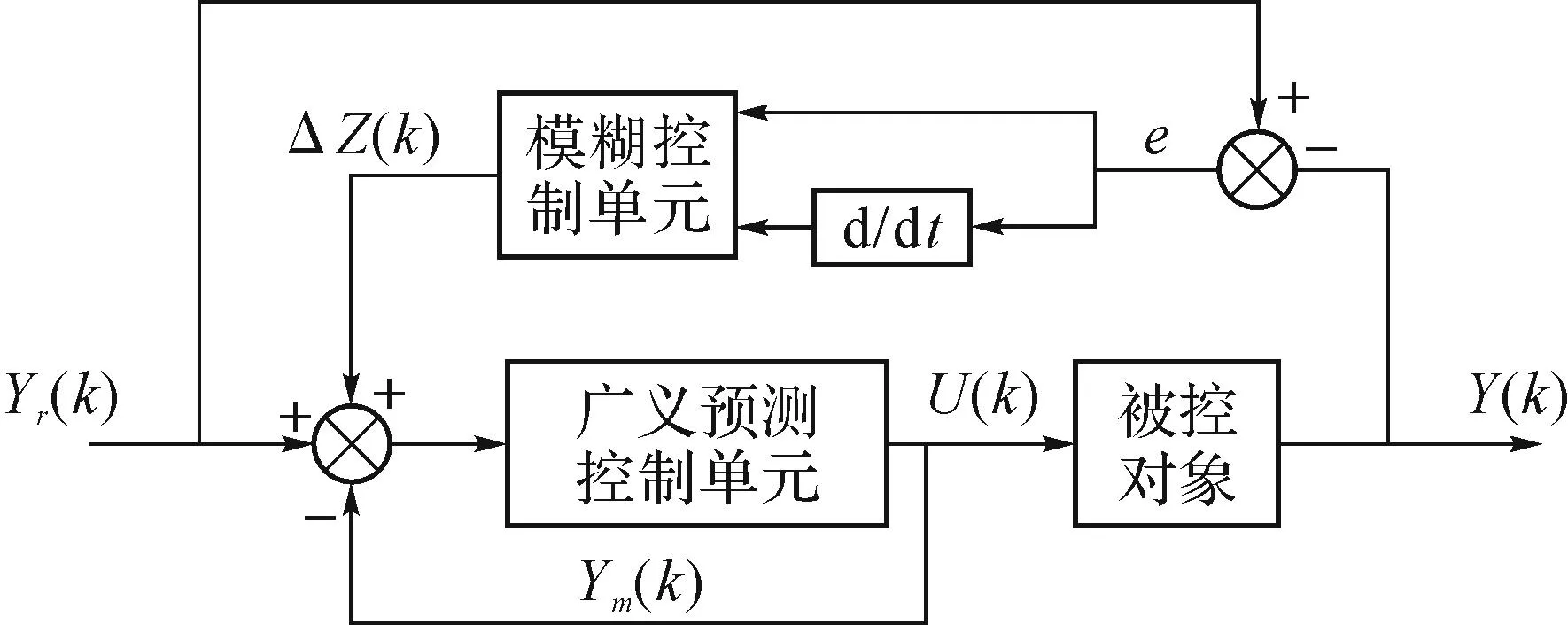
圖4 預(yù)測模糊控制器框圖Fig.4 The block diagram of predictive fuzzy controller
設(shè)D=Fp(z-1)+∧/QGp,p-1,則廣義預(yù)測控制單元的控制輸出為
u(k)=u(k-1)+D[yr(k+d+p)-ym(k+d+p)]+δu(k),
其中δu(k)為一反饋補(bǔ)償信號,可寫成δu(k)=DΔz(k),上式可寫成


(15)
式中Δz(k)即二維模糊控制單元的輸出,模糊控制器的輸入即為預(yù)測誤差e和誤差變化率ec.根據(jù)預(yù)測誤差特性運(yùn)用模糊推理彌補(bǔ)傳統(tǒng)預(yù)測控制算法在系統(tǒng)信息處理上的不足.
2.4控制器的實(shí)現(xiàn)
本課題設(shè)計的控制器采用單值廣義預(yù)測控制,通過減少預(yù)測量,縮短控制時域長度,大幅降低了運(yùn)算量.但是單值廣義預(yù)測控制器的實(shí)現(xiàn)仍然需要進(jìn)行大規(guī)模的矩陣運(yùn)算和迭代運(yùn)算,系統(tǒng)資源占用量大,運(yùn)算耗時長,這是限制其廣泛應(yīng)用的最主要原因.
本課題采用DSP和FPGA相協(xié)作的高速數(shù)據(jù)處理板卡作為預(yù)測模糊控制器實(shí)現(xiàn)的硬件平臺,其中,DSP芯片采用TI公司的TMS320C6678,其主要負(fù)責(zé)浮點(diǎn)型運(yùn)算,FPGA芯片采用Xilinx公司的XC7K325T-1ffg900,其主要負(fù)責(zé)邏輯控制,兩者通過高速SPI進(jìn)行數(shù)據(jù)通信,任務(wù)分工如圖5.該方案充分利用了DSP和FPGA的特性,大大提高了運(yùn)算速度,控制器輸出周期由5.7s降低至1.3s,采樣控制頻率可提高4.3倍.
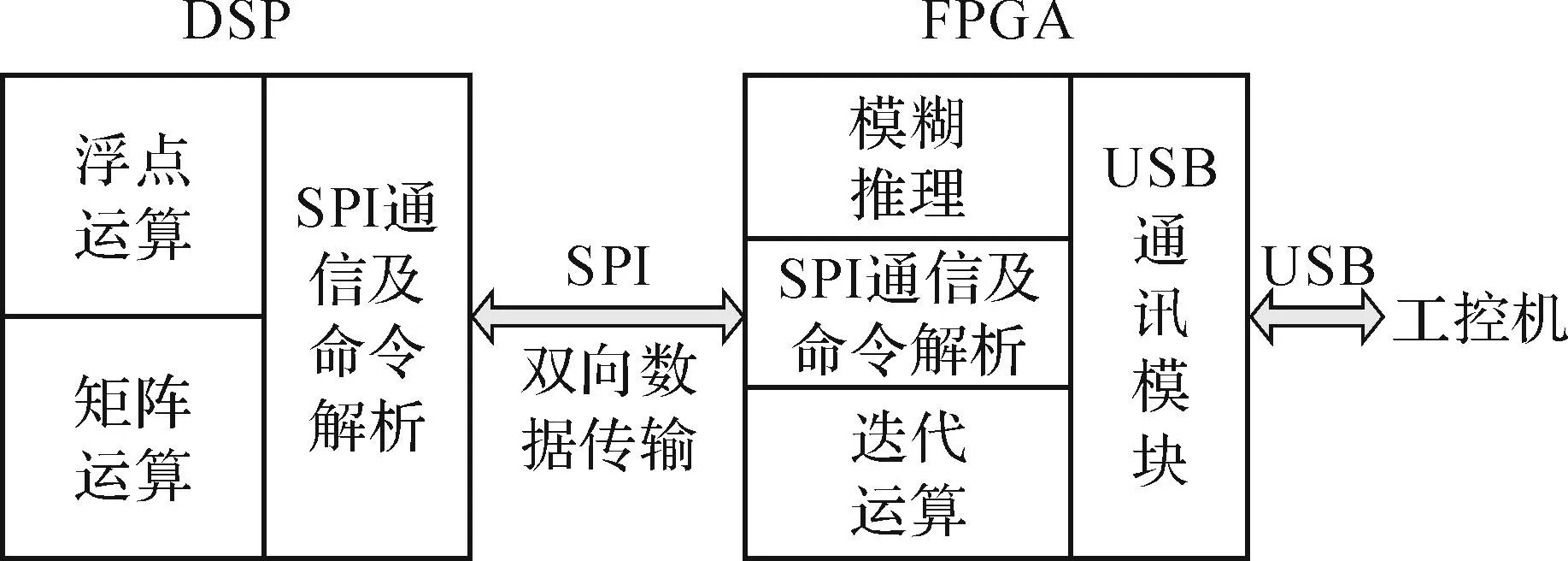
圖5 DSP和FPGA數(shù)據(jù)處理協(xié)作分工圖Fig.5 The collaboration diagrams of DSP and FPGA in data processing
3實(shí)驗(yàn)與結(jié)果
為了驗(yàn)證本課題設(shè)計的控制器的性能,采用傳統(tǒng)PID控制器作為基準(zhǔn)對象,比較兩者對輸入階躍擾動的響應(yīng)速度和系統(tǒng)超調(diào)量.控制器設(shè)定輸入由0.2MPa變成0.35MPa再降為0.2MPa,汽化站輸出總管壓力響應(yīng)曲線如圖6.由圖可看出,PID控制器響應(yīng)速度為0.02MPa/min,超調(diào)量為18.4%.本課題設(shè)計的預(yù)測模糊控制器超調(diào)量為2.89%,響應(yīng)速度為0.075MPa/min,完全滿足控制指標(biāo)響應(yīng)速度大于0.05MPa/min、超調(diào)量小于3.5%的設(shè)計要求.從圖7、圖8輸出總管壓力誤差曲線可以更加直觀地看出,預(yù)測模糊控制器動態(tài)跟隨性明顯好于PID控制器.
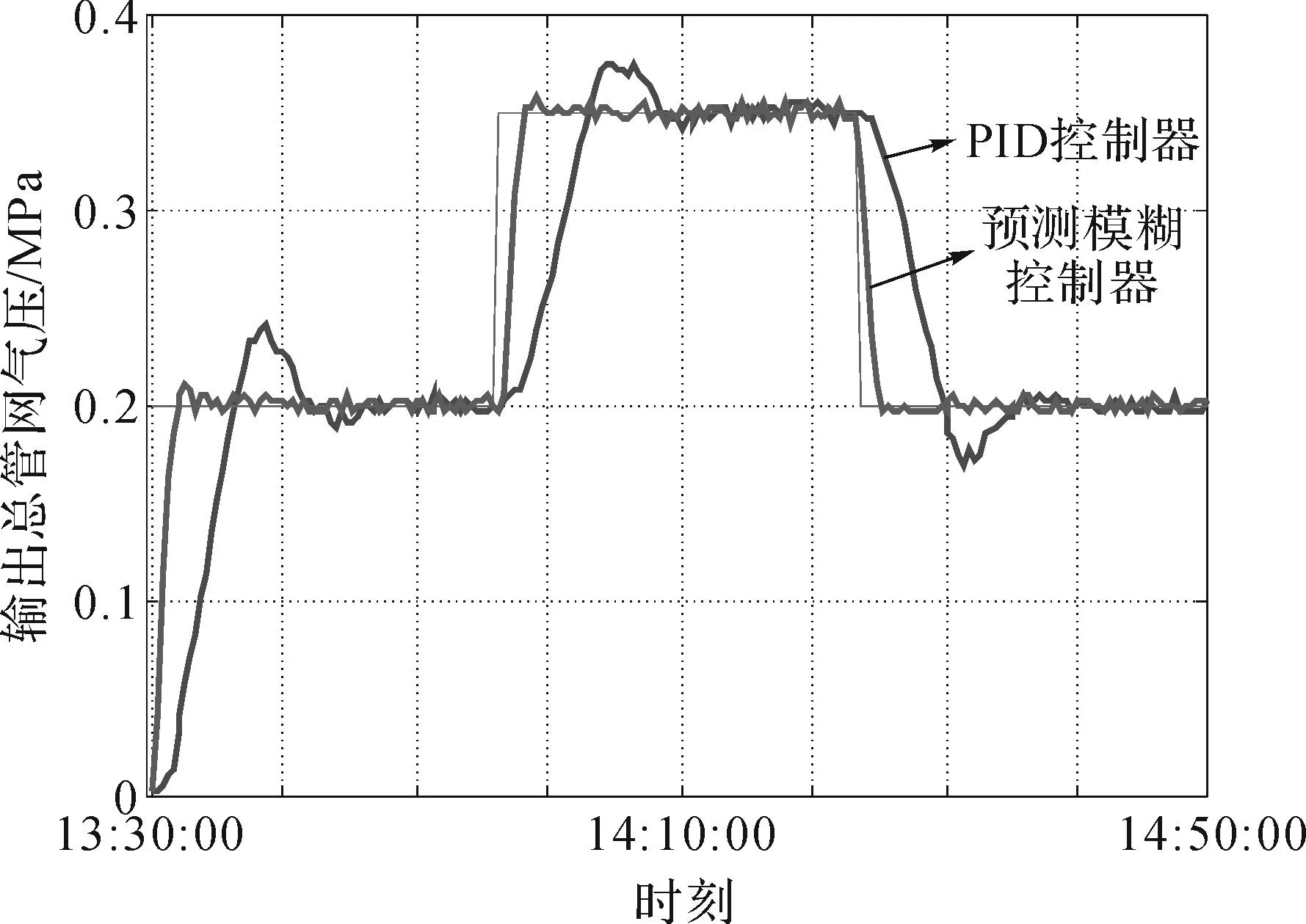
圖6 采用PID控制器輸出總管壓力的響應(yīng)曲線Fig.6 The response curves of pipe output pressure applied in PID controller
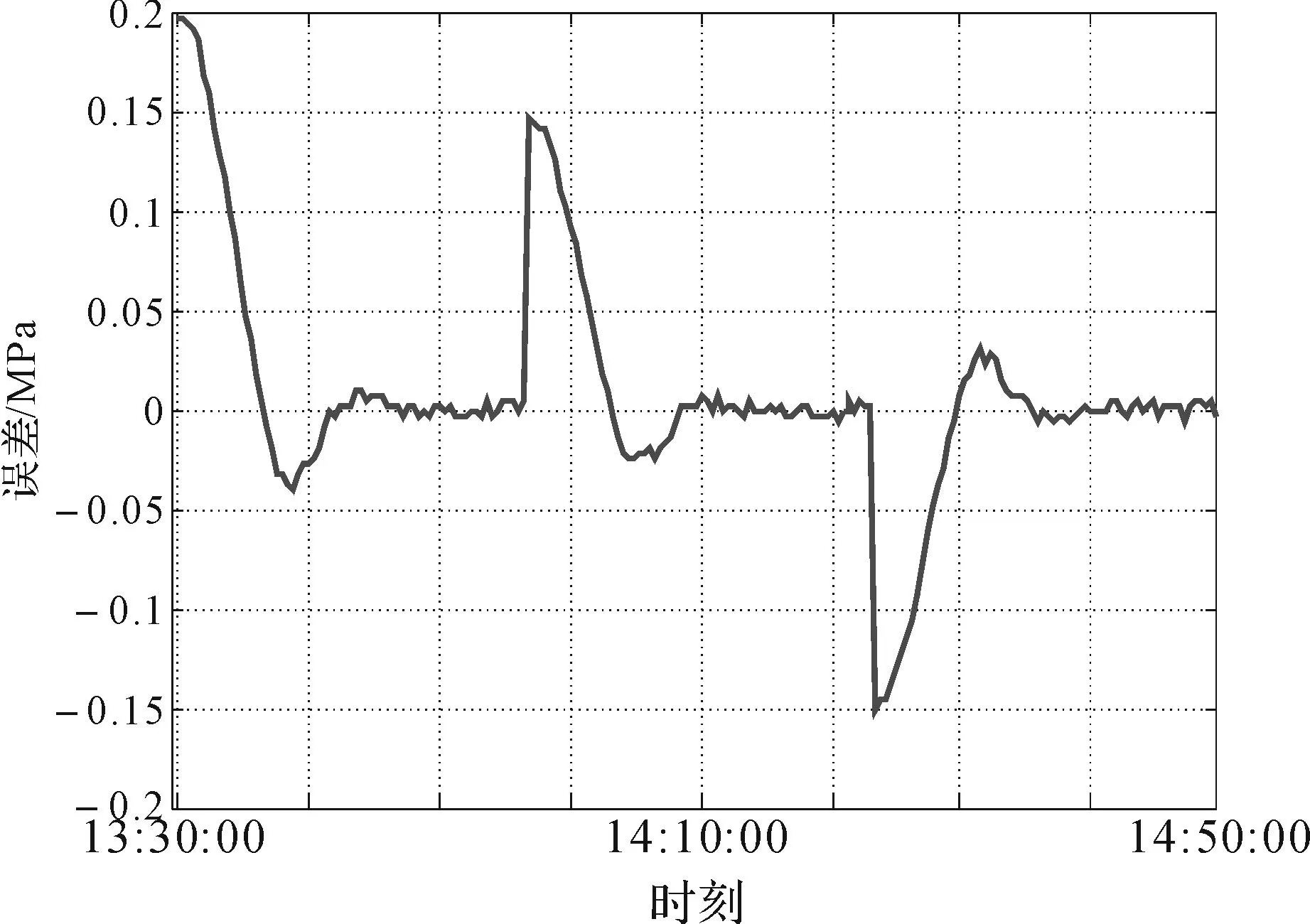
圖7 采用PID控制器輸出總管壓力誤差曲線Fig.7 The error curves of pipe output pressure applied in PID controller
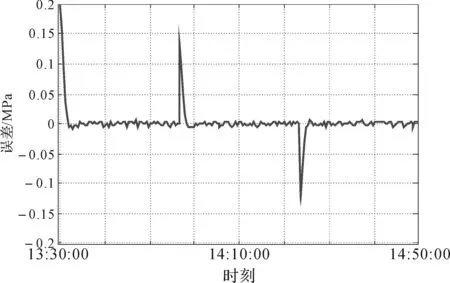
圖8 采用預(yù)測模糊控制器輸出總管壓力誤差曲線Fig.8 The error curves of pipe output pressure applied in predictive fuzzy controller
3.1實(shí)際調(diào)峰效果
南昌市某天然氣公司供氣區(qū)域夏季日均用氣量為20萬m3,主要采用管道天然氣供氣,供氣管道壓力設(shè)計為0.35MPa,其小時最大供氣量為10 000m3.該區(qū)域擁有1座采用本課題提出的調(diào)峰控制方案的LNG汽化站.該供氣區(qū)域高峰期小時用氣量可達(dá)16 200m3,用氣高峰期存在6 200m3的用量差,將導(dǎo)致供氣管網(wǎng)氣壓下降,故需要LNG汽化站進(jìn)行調(diào)峰,平穩(wěn)氣壓,提高供氣質(zhì)量.圖9為7月份某天天然氣小時需求量與供氣管網(wǎng)氣壓監(jiān)測圖.從圖中可看出,在上午10:00:00到13:00:00出現(xiàn)用氣高峰,管道天然氣供氣缺口最高達(dá)62%,采用PID控制器時,管網(wǎng)氣壓波動明顯,氣壓壓降超過20%.采用預(yù)測模糊控制器的管網(wǎng),氣壓降小于3.5%,LNG汽化站及時補(bǔ)充了用氣缺口,穩(wěn)定了供氣壓力,保證了用氣高峰期供氣質(zhì)量,調(diào)峰效果顯著.
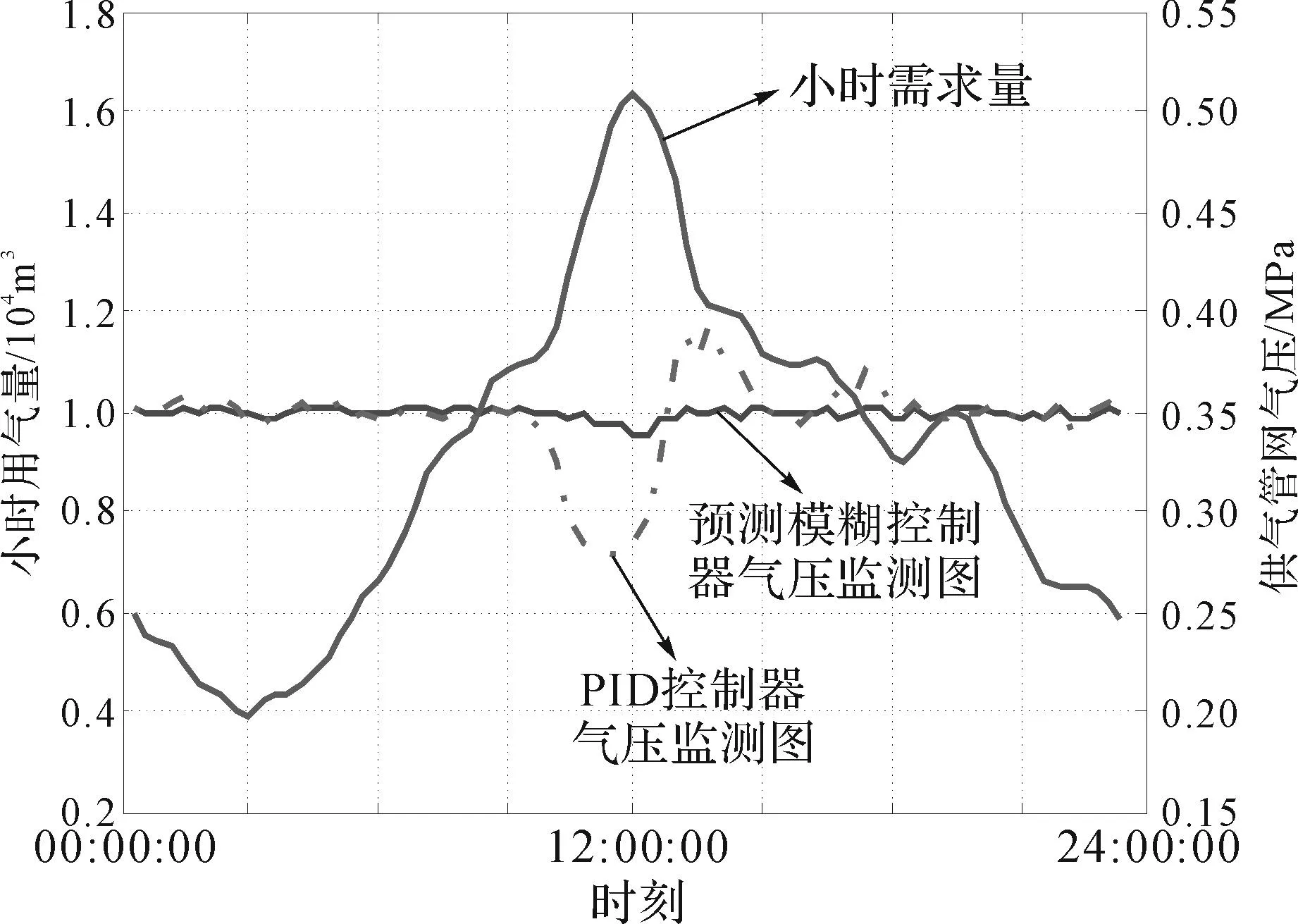
圖9 城市小時用氣量與管網(wǎng)氣壓監(jiān)測圖Fig.9 The figures of the hourly consumption of the city and the pipe network pressure
4結(jié)束語
本文介紹了一種LNG儲罐壓力調(diào)節(jié)與調(diào)峰技術(shù)相結(jié)合的LNG汽化站系統(tǒng),并詳細(xì)介紹了汽化站出口壓力控制過程.該系統(tǒng)采用一體化調(diào)峰技術(shù),簡化了LNG汽化站控制系統(tǒng),系統(tǒng)搭建投入降低了17%;采用單值廣義預(yù)測控制,大大降低了運(yùn)算量,提高了系統(tǒng)控制實(shí)時性;利用二維模糊控制器,根據(jù)預(yù)測誤差對預(yù)測控制器進(jìn)行信息補(bǔ)償,實(shí)現(xiàn)了雙重誤差預(yù)測,提高了系統(tǒng)的魯棒性.目前,采用該方案改造的南昌某LNG汽化站調(diào)峰系統(tǒng),在6個月的試運(yùn)行中,故障率相比改造前降低了80%,供氣區(qū)域管網(wǎng)氣壓穩(wěn)定,未出現(xiàn)用戶氣壓不穩(wěn)、斷氣現(xiàn)象,調(diào)峰效果顯著.
參考文獻(xiàn):
[1] 邢云,劉淼兒.中國液化天然氣產(chǎn)業(yè)現(xiàn)狀及前景分析[J].天然氣工業(yè),2009,29(1):120-123.
XINGYun,LIUMiao-er.StatuesqueandprospectanalysisonLNGindustryinChina[J].NaturalGasIndustry,2009,29(1):120-123.
[2] 徐正康,張寶金,喬珩.城市天然氣調(diào)峰的探討[J].煤氣與熱力,2005,25(4):44-47.
XUZheng-kang,ZHANGBao-jin,QIAOHeng.Discussiononnaturalgaspeakshavingincities[J].Gas&Heat,2005,25(4):44-46.
[3] 張薇.LNG項(xiàng)目的儲氣調(diào)峰作用:兼論LNG項(xiàng)目建設(shè)理念的轉(zhuǎn)變[J].天然氣工業(yè),2010,30(7):107-109.
ZHANGWei.Storageandpeak-shavingroleofLNGproject:anewconceptintheLNGprojectconstruction[J].NaturalGasIndustry,2010,30(07):107-109.
[4] 魏明.LNG汽化站調(diào)峰研究[D].武漢:華中科技大學(xué)環(huán)境科學(xué)與工程學(xué)院,2012:10-12.
WEIMing.StudyonpeakshavingbyLNGgasificationstation[D].WuHan:HuazhongUniversityofScience&Technology,CollegeofEnvironmentalScienceandEngineering,2012:10-12.
[5] 劉之定,劉曉東.低溫儲罐自增壓過程仿真研究[J].節(jié)能技術(shù),2010,28(6):508-511.
LIUZhi-ding,LIUXiao-dong.Simulationresearchonself-pressurizationprocessofcryogenictank[J].EnergyConservationTechnology,2010,28(6):508-511.
[6] 孫建平,譚悅,李冰.單值模糊廣義預(yù)測控制及其在熱工對象中的應(yīng)用[J].儀器儀表學(xué)報,2008,29(7):1494-1498.
SUNJian-ping,TANYue,LIBing.Simplifiedgeneralpredictivecontrolanditsapplicationinthermalsystem[J].ChineseJournalofScientificInstrument,2008,29(8):1494-1498.
[7] 樊兆峰,馬小平,邵曉根.非線性系統(tǒng)RBF神經(jīng)網(wǎng)絡(luò)多步預(yù)測控制[J].控制與決策,2014,29(7):1274-1278.
FANZao-feng,MAXiao-ping,SHAOXiao-gen.RBFneuralnetworkmultisteppredictivecontrolfornonlinearsystems[J].ControlandDecision,2014,29(7):1274-1278.
[8] 李奇安,褚健.對角CARIMA模型多變量廣義預(yù)測控制改進(jìn)算法[J].控制理論與應(yīng)用,2007,24(3):423-426.
LIQi-an,CHUJian.ImprovedalgorithmformultivariablegeneralizedpredictivecontrolofdiagonalCARIMAmodel[J].ControlTheory&Applications,2007,24(3):423-426.
[9] 何仁初,印大偉,侯明輝,等.基于Matlab/Simulink的乙烯精餾塔多變量預(yù)測控制仿真研究[J].自動化技術(shù)與應(yīng)用,2014,33(5):37-43.
HERen-chu,YINDa-wei,HOUMing-hui,etal.SimulationstudyofmultivariablepredictivecontrolforethylenerectifierbasedonMatlab/Simulink[J].TechniquesofAutomaticandApplications,2014,33(5):37-43.
[10] 于廣鵬,譚德榮,初敏,等.基于模糊多目標(biāo)決策的駕駛員反應(yīng)狀態(tài)辨識[J].科學(xué)技術(shù)與工程,2014,14(33):294-299.
YUGuang-peng,TANDe-rong,CHUMing,etal.Drivers’reactionstaterecognitionbasedonfuzzymulti-objectivedecision[J].ScienceTechnologyandEngineering,2014,14(33):294-299.
[11] 呂寬州,陳素霞,黃全振.柔性機(jī)械臂的軌跡跟蹤與振動模糊控制[J].工程設(shè)計學(xué)報,2015,22(1):78-83.
LüKuan-zhou,CHENSu-xia,HUANGQuan-zhen.Flexiblemanipulatortrajectorytrackingandvibrationfuzzycontrol[J].ChineseJournalofEngineeringDesign,2015,22(1),78-83.
[12] 胡啟國,任龍.汽車四輪轉(zhuǎn)向自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)控制研究[J].工程設(shè)計學(xué)報,2013,20(5):434-440.
HUQi-guo,RENLong.Researchonadaptivefuzzyneuralnetworkcontroloffour-wheelsteeringsystem[J].ChineseJournalofEngineeringDesign,2013,20(5),434-440.
[13] 羅偉.基于灰色預(yù)測的參數(shù)自校正構(gòu)架電阻爐溫度模糊控制系統(tǒng)[J].計算機(jī)測量與控制,2013,21(4):965-967.
LUOWei.Temperaturefuzzycontrolsystemforframeresistancefurnacebasedongraypredictionmodel’sparameterself-control[J].ComputerMeasurement&Control,2013,12(4):965-967.
[14] 顧星,鐘鳴,姚玉峰.基于模糊自適應(yīng)PID的加樣臂位置控制[J].工程設(shè)計學(xué)報,2012,19(5):385-390.
GUXing,ZHONGMing,YAOYu-feng.Positioncontrolforsamplingarmbasedonself-adaptingfuzzy-PID[J].ChineseJournalofEngineeringDesign,2012,19(5),385-390.
[15] 李如林,張根寶,李勤勇.基于預(yù)測模糊/PID控制的盤磨控制器設(shè)計[J].化工自動化及儀表,2010,37(5):26-28.
LIRu-lin,ZHANGGen-bao,LIQin-yong.Designofplatemillcontrollerbasedonpredictivefuzzy/PID[J].ControlandInstrumentsinChemicalIndustry,2010,37(5):26-28.
[16] 王士星,孫富春,許斌.高超聲速飛行器的模糊預(yù)測控制[J].東南大學(xué)學(xué)報(自然科學(xué)版),2013,43(Z1):22-27.
WANGShi-xing,SUNFu-chun,XUBing.Fuzzyhypersonicflightcontrolwithpredictionmodel[J].JournalofSoutheastUniversity(NaturalScienceEdition),2013,43(Z1):22-27.

The application of predictive fuzzy control in the liquefiednatural gas peak-shaving system
LI Fu-gui, LONG Wei, LUO Liang, ZHAN Cong-lai
(College of Information Engineering, Nanchang University, Nanchang 330031, China)
Abstract:LNG(liquefied natural gas) gasification station resently usually separates the tank pressure adjustment from the peak-shaving technique, so the system is relatively complex and need a large investment. Through demonstration research, a system scheme which was combined by the tank pressure adjustment and peak-shaving technique was proposed. Aiming at the characteristics of large lag, time-varying and nonlinear in the storage tank pressure system, the control strategy by taking the generalized predictive control algorithm as the core and the fuzzy control as dynamic feedback compensation was adopted. Accurate pressure control of the storage tank was realized combining with the characteristics of DSP and FPGA device for high-speed data processing. In system practical operation, the control was proved with the advantages of quick adjustment, real-time and strong robustness. And the results showed that the outlet pressure fluctuation of the gasification station was less than 3.5%, and it had a good peak-shaving effect. This system has the characteristics of simple structure, strong anti-interference ability and good peak-shaving effect. And it provides a new idea for city gas peak-shaving system.
Key words:peak-shaving; predict fuzzy control; self-pressured; city gas delivery; pressure control; tank system
中圖分類號:TE 8; TB 114.2
文獻(xiàn)標(biāo)志碼:A
文章編號:1006-754X(2016)01-0095-06
作者簡介:李富貴(1992—),男,江西鷹潭人,碩士,從事計算機(jī)控制與嵌入式智能儀表研究,E-mail:1239019842@qq.com.通信聯(lián)系人:龍偉(1952—),男,江西南昌人,教授,碩士,從事計算機(jī)控制與嵌入式智能儀表、光機(jī)電一體化和醫(yī)學(xué)檢驗(yàn)技術(shù)等研究,E-mail:13803535927@163.com.http://orcid.org//0000-0001-8138-8681
收稿日期:
2015-06-04.
本刊網(wǎng)址·在線期刊:http://www.journals.zju.edu.cn/gcsjxb
基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(61261011).
DOI:10.3785/j.issn. 1006-754X.2016.01.015