基于地球磁場的室內定位系統的研究
2016-03-07 00:31:52熊明亮刁夢雯趙國梁
無線互聯科技 2015年18期
熊明亮 刁夢雯 趙國梁
摘要:文章設計了基于地磁的室內定位系統,給出了系統的結構框圖,介紹了地磁的模型及地磁基準圖的構建。然后介紹了地磁的校正方法以及基于蒙特卡洛方法的粒子濾波地磁匹配算法。文章在粒子濾波的重采樣過程中通過復制重要粒子以及重新采樣低權值粒子提高了定位的性能。
關鍵詞:地磁;室內定位;蒙特卡洛;粒子濾波;重采樣
隨著通信技術和物聯網技術的發展,工業和服務行業信息化需求急劇上漲,定位技術極大地便捷了人們的生產和生活。其中室內定位技術在醫院、倉庫、博物館、機場、車站、商場等場合有著極大的應用需求。通過使用地球磁場的物理量進行室內定位具有無源、無輻射、全地域、全天候、體積小、能耗低的優勢。基于地磁的室內定位技術包含有地磁傳感、地磁校正、室內地磁地圖構建及地磁匹配濾波等過程。
1地磁模型及地磁傳感
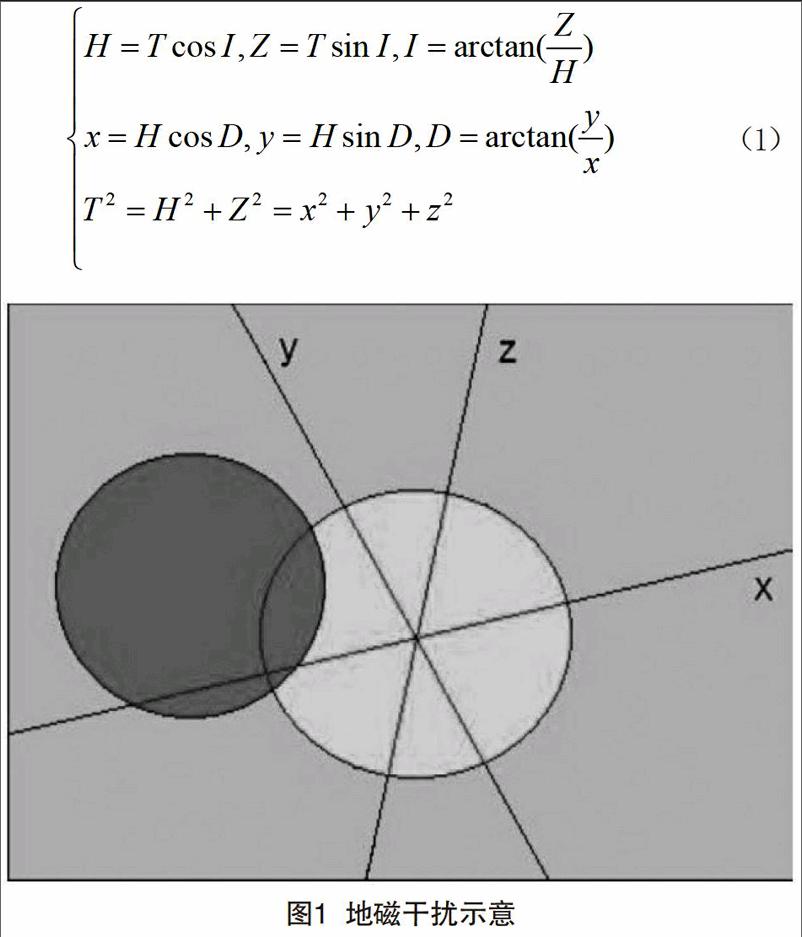
地磁場是有大小、有方向的矢量,其值可以通過地磁三分量表示。通過地磁三分量可以引出水平強度、地磁總場、磁偏角、磁傾角等信息。這些信息被稱作地磁七要素,均可作為地磁定位的特征量。令X,Y,Z分別為地磁的北向強度、東向強度和垂直強度,如圖1所示。各個地磁信息之間有著公式l所示的轉化關系。
公式1中H為水平分量,它與X的夾角D稱為磁偏角。T為地磁總場。地磁總場與水平分量的夾角I被稱作磁傾角。
在室內每隔一米作為一次采集節點,每個點包含X,Y,Z等地磁數據,在室內采集M*N個點以制作成室內地磁基準圖。
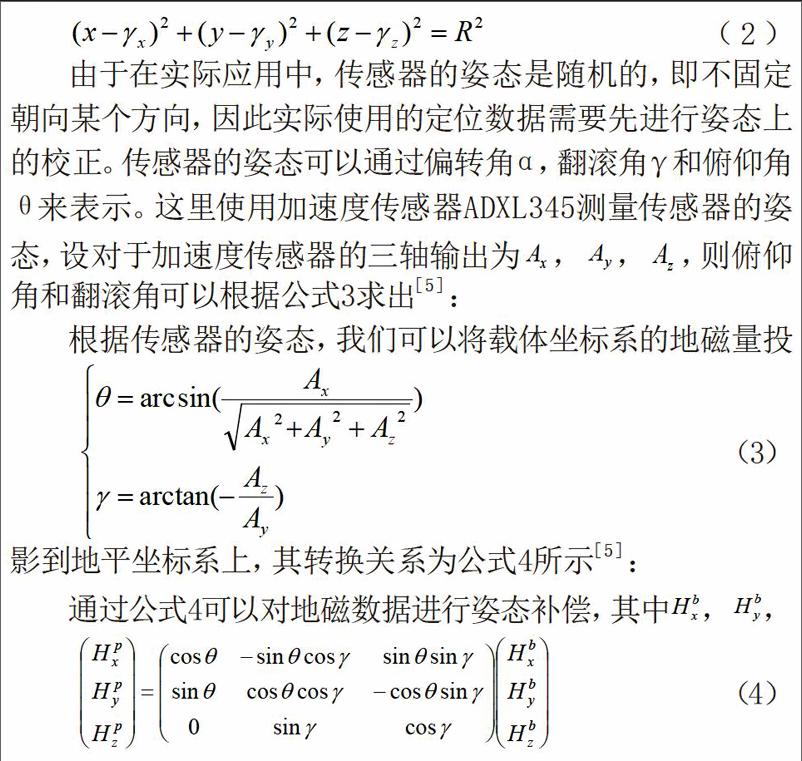
2地磁傳感校正
由于具有磁性的物體或者是可以影響局部磁場的物體存在,所以磁場傳感器所處的位置的磁場會有偏差,這種影響即地磁干擾。在沒有地磁干擾時,傳感器繞著Z軸旋轉,則水平分量在XY平面內總是圖3中綠色部分,即以Z軸為圓心的標準圓。一般來說,我們認為地磁干擾γ1在某一點為一恒定的矢量,則實際測量值α為實際地磁量β與γ之和。因此實際測量的地磁量在XOY內的投影為圖1中紅色部分,即一個位移的圓。
因此根據上述特點可知,我們在某一點通過旋轉傳感器采集各個方向的地磁數據,則各個數據在空間直角坐標系中可以構成一個位置的球體。根據公式2可以計算出球心。于是對于每個地磁分量減去位移的大小就可以對地磁干擾進行校正。針對這種校正原理,一般有繞八字校正法和十面校正法。
3基于地磁的室內定位系統
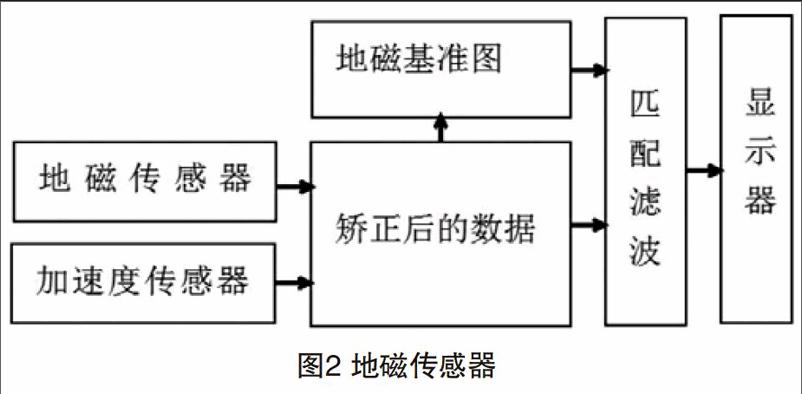
地磁定位系統首先通過傳感器采集磁場數據,然后對地磁干擾進行球體位移的校正。在磁場傳感的過程中同步采集三軸加速度傳感器的數據,算出翻滾角和俯仰角以進行姿態的矯正。通過所獲取的最終的傳感數據建立地磁基準地圖。在實際人員行走中,通過一定的條件觸發一次上述的采集過程,通過匹配算法進行濾波并顯示結果,該過程如圖2所示。
基于地磁的室內定位系統由地傳感器、三軸加速度傳感器、主控芯片、鍵盤、顯示器及電源管理模塊組成。
4地磁匹配算法
地磁匹配的算法通過實時采集的傳感器所處位置的地磁物理量及人員運動的狀態與預先采集建立的地磁基準圖進行匹配從而進行定位。目前,地磁匹配算法有很多種,有最小距離度量法、相關度量法和粒子遞推濾波等方法。本文采用的粒子濾波算法基于蒙特卡洛方法,核心思想是通過序列重要性采樣和隨機近似概率分布遞歸來計算相關概率分布。
其方法是先建立地磁基準地圖,由于條件限制,這里在長30m的走廊只取地磁總場強度作為特征值存入地圖記作Mi,然后通過線性插值后使分辨率為0.1m每個點。每次的狀態記作Xt,傳感器所處位置的地磁總場強度記作Zt,則t時刻目標的重要性函數為:
(1)重要的粒子復制,根據歸一化權重將權值大的粒子進行多次復制,將權值小粒子進行刪減。
(2)不重要的粒子重新根據均勻分布重新采樣,即對權值進行排序,將排序靠后的粒子進行重新分布。
5總結
本文設計了一個基于地磁傳感的室內定位系統,對基于蒙特卡洛方法的粒子濾波定位算法進行了驗證,實際測試匹配精度可以穩定為2m以內。本文中給出的方法的特點是通過提前預測粒子的運動方向以使得粒子的更新更容易收斂。在重新采樣過程中,將不重要的粒子進行重新均勻分布以避免經過多次濾波后粒子集中在某幾個原始位置上。在后續的研究中將提高系統的抗噪性能,并且從人員運動狀態預測的精度上提高定位的精度。