三軸仿真轉臺控制系統的設計
2016-03-07 00:48:59孫克誠王琪
無線互聯科技 2015年18期
孫克誠 王琪

摘要:文章介紹了一種無人機飛行半物理仿真平臺的控制系統,本系統是以ARM處理器為核心控制器,采用模塊化設計的方法,設計了一個三軸轉臺控制系統。系統采用PC機與下位機兩級控制,使用積分分離式的PID控制算法,對三軸轉臺進行精確控制。控制系統能控制三軸轉臺轉動并對平臺上捷聯慣導系統姿態信息進行實時測量,保存和顯示。
關鍵字:三軸轉臺;PID算法;STM32;姿態控制;捷聯慣導系統;
近些年來,隨著現代戰爭的日益發展,無人機也因其無人駕駛的獨特性能得到各國的重視與關注。飛行仿真轉臺能夠真實地模擬出無人飛行器的動力學特性,在實驗室中就能對飛行器的飛行姿態進行仿真,是檢測無人飛控系統性能以及進行半物理仿真實驗的重要裝置。三軸轉臺的控制精度直接影響了仿真或調試、檢測的結果,因此,三軸轉臺的控制系統設計往往決定了轉臺的質量。本文結合實際設計了一種可實時測量平臺上傳感器數據的飛行仿真轉臺控制系統。
1系統結構及總體方案設計
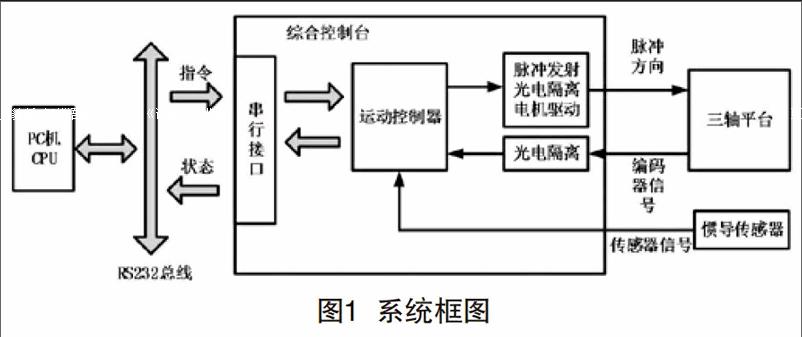
本三軸轉臺控制系統由慣性傳感器模塊、STM32微控制電路、OLED顯示模塊、按鍵輸入模塊、步進電機驅動模塊、RS 232串口通信模塊、編碼器數據采集模塊等部分組成。系統整體結構框圖如圖1所示。慣性傳感器系統采集到原始信號,通過I2C總線發送給STM32微控制器,STM32控制器運用捷聯慣導算法處理慣性傳感器獲得的數據,解算出轉臺的實時姿態。在LCD液晶顯示屏上實時顯示姿態參數,另外使用MAX3232將TTL電平轉換成RS232電平,再與PC機的COM口連接,并將姿態數據打包成固定格式的串口數據包,通過串口發送給上位機軟件,在PC端上位機軟件實時動態顯示姿態參數和波形曲線。在上位機軟件上可以控制三軸平臺的狀態,模擬無人機的俯仰、翻滾、航向三軸方向上的姿態控制,控制信息通過COM口發送給STM32控制器,編碼器模塊采集三軸平臺的轉動數據經過PID算法處理后反饋給驅動電路控制步進電機轉動,提高了三軸轉臺的轉動精度。三軸平臺與控制系統之間的數據采用光電隔離,防止電機干擾和損壞控制系統。
2硬件設計
2.1步進電機驅動部分
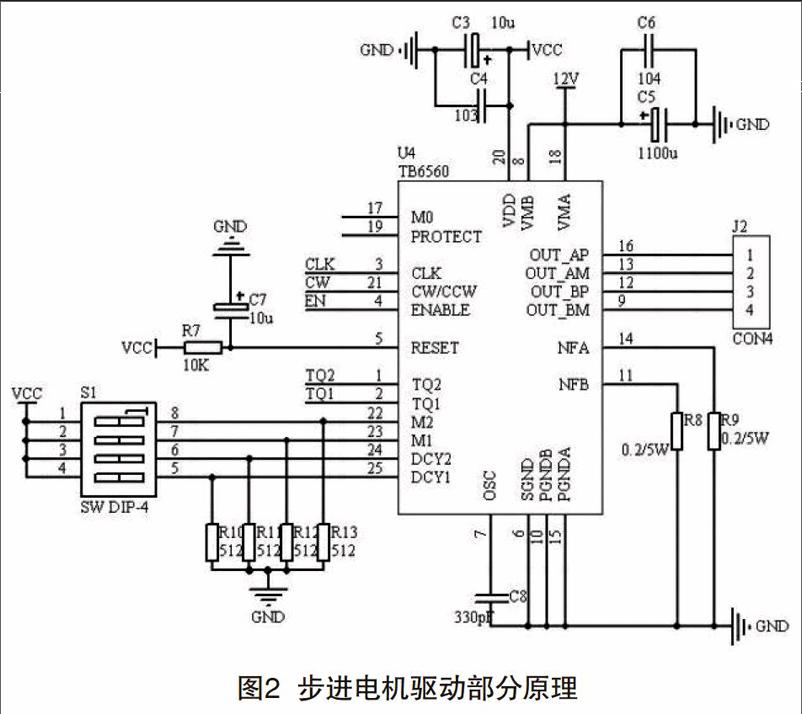
步進電機驅動部分電路原理如圖2所示。步進電機的控制信號主要是CLK,CW,ENABLE,分別控制步進電機的速度和轉角、電機的正反向轉動以及電機的使能,3個信號均須用光耦隔離電路隔離后與控制臺連接。光耦的主要作用是防止電機干擾和損壞微控制器接口電路,其次光耦還起到對控制信號進行整形的作用。對于CLK與CW信號,要選擇高速光耦,以保證信號經過光耦后不會發生滯后或者畸變而影響電機驅動的性能。CLK與CW信號采用6N137高速光耦隔離,而ENABLE信號采用TLP521普通光耦隔離。
驅動電路電源采用12V開關電源供電,VMB和VMA是步進電機驅動電源引腳,為達到穩壓的目的,VMB和VMA應當接入瓷片去耦電容和電解電容。OUTAP,OUTAM,OUTBP,OUTBM引腳為步進電機兩相輸出接口。NFA,NFB為電機兩相最大驅動電流定義引腳,由于實際步進電機每相的最大驅動電流為2.5A,則取串聯電阻為0.2Ω,PGNDA,PGNDB和SGND根據定義分別接電機兩相驅動引腳地和邏輯電源地。
邏輯控制電路的電源為5V,VDD為邏輯電源輸入引腳,應當接入去耦電容和旁路電容來減小干擾噪聲的影響。RESET為芯片復位腳,低電平有效。步進電機在低頻工作時,存在振動大、噪聲大的缺點,細分驅動的細分功能可以解決這些問題,M1,M2是TB6560的細分設置引腳,外接撥碼開關可以設置不同的細分值,譬如整步、半步、1/8細分、1/16細分等。步進電機由于自身狀況、電源狀況和脈沖頻率等其他因素的影響,可能會產生高頻噪聲,通過電流衰減模式的設置可減小這種噪聲,DCY1和DCY2為電源衰減模式定義引腳,外接撥碼開關以進行模式設置。
2.2基于STM32的外圍接口電路設計
基于Cortex M3內核的STM32F103ZET6是意法半導體生產的高性能嵌入式微處理芯片,該芯片內核最高可達72MHz工作頻率,有512K的閃存程序存儲器和64K字節的SRAM,有多達80個標準IO口,有3個12位模數轉換器,11個定時器,同時有13個通信接口,其中有2個I2C接口、5個串行接口、3個SPI接口,并支持USB2.0,SDIO和CAN總線接口,是一款專門為滿足高性能、低功耗、實時應用系統而設計的嵌入式微處理器,并且該芯片能很好地滿足本控制系統的控制、處理、數據采集、傳輸、顯示等功能。基于以上優點,本控制系統采用STM32F103ZET6作為微控制系統的核心處理器,STM32微處理器外圍接口電路如圖3所示。
2.2.1捷聯慣導模塊
捷聯慣導模塊使用的是MPU6050,其為一款集成了三軸陀螺儀和三軸加速度計的六軸運動傳感器,含有可擴展的數字運動處理器DMP,可通過I2C接口與其他數字傳感器連接。傳感器內部集成16位AD,測量到的三軸角速率和三軸加速度模擬量信號經過AD轉換為數字量信號,將數字信號存儲到傳感器的寄存器中,STM32通過I2C總線接收到角速率和加速度數字信號。應用捷聯慣導算法將陀螺儀測量的載體角速度解算成姿態矩陣,從中提取載體的姿態信息,并用姿態矩陣把加速度計的輸出從載體坐標系變換到導航坐標系,進行導航解算。微控制將解算得到的姿態信息打包成固定格式的串口數據發送給上位機軟件,并在上位機上實時顯示。
2.2.2LCD液晶接口設計
本控制系統采用2.8英寸320×240分辨率的TFT-LCD液晶顯示屏對姿態數據進行顯示,系統采用STM32的FSMC接口來控制LCD液晶的顯示,能夠在不增加外部器件的情況下同時擴展多種不同類型的靜態存儲器。使用FSMC接口訪問外部設備的時序可以編程,可把液晶顯示屏當作外部存儲設備來使用,能夠根據不同的外部存儲器類型,發出相應的數據、控制、地址信號類型來匹配信號的速度,更好滿足本控制系統設計對LCD接口、控制器體積以及成本的綜合要求。
2.2.3編碼器模塊
本系統采用ZSP3806增量式旋轉編碼器,具有體積小、重量輕、結構緊湊等優點。編碼器的使用使整個控制系統構成一個閉環系統,主控制器采集到編碼器采集到的轉動數據經過數據處理,采用PID算法反饋給控制輸出,構成精準的轉動控制。
2.2.4電源管理模塊設計
本系統采用I2V直流電源供電,通過LM7805芯片獲得5V電壓輸出,5V電壓再經過LMS1117輸出3.3V電壓,電源電路中并聯電解電容和瓷片電容來達到濾除干擾的目的。
2.2.5串口通訊模塊設計
本系統中的串口通訊電路采用MAX3232芯片,完成TTL電平與RS232電平之間的轉換,串口通訊電路主要用于控制器與PC之間的通信。
3基于STM32的軟件實現
3.1載體姿態采集
設計中STM32控制器采用I2C總線協議對傳感器進行數據采集。MPU6050的初始化包括電源管理、陀螺儀自檢及測量范圍、加速度自檢及測量范圍、陀螺儀采樣頻率、濾波頻率等的設置。采集到飛行器的三軸加速度數據和角加速度數據,然后經過數據處理和一些相關算法進行結算,就能夠得到三軸平臺的姿態、速度等信息。
3.2控制器算法及實現
PID(比例-積分-微分)調節是連續控制系統技術成熟、應用廣泛的一種控制技術,因此被廣泛地應用于各種控制系統中。它的特點是結構簡單,參數設定及調節方便,結構改變靈活,適應性強。
A為門限值,當有大偏差值存在時,積分項不起作用,偏差在門限范圍之內,才會引入積分項,這樣減少超調現象發生。
系統通過定時器每隔t時間中斷一次,隨即完成一次PID計算,每次采集到的u(k)都保存到緩存中,在緩存中,u(k1),u(k-2)的值不斷更新,然后,通過這2個值計算出e(k-1),e(k-2),把值代入公式中,就可以得到u(k)的值,即為控制輸出。中斷PID程序流程如圖4所示。
4結語
本文介紹了一種基于STM32的三軸平臺控制器設計。在對仿真轉臺的控制系統進行研究后,選用合適的運動控制器件和控制算法實現飛行仿真轉臺的模擬運動。系統設計是在滿足系統的各項功能要求的前提下,還有下述優點:(1)采用積分分離式的PID算法,控制精度高,同時顯著降低了被控制變量的超調量和過渡過程時間。(2)具有廣泛的適應性、可擴展性和互換性。所有部件均具有符合業界標準的接口。(3)系統集成度高,可靠性高,維護簡單。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16