CORS與自架基站下的機載POS精度分析
2016-03-15 10:09:43王薇薇張輝
山東工業技術 2016年6期
王薇薇 張輝

摘 要:本文對同一架次的機載pos數據,分別利用CORS站數據和自架基站數據進行差分解算,針對當兩類模式均可用的條件下,如何獲取較高精度的機載POS數據處理成果,進行了探究分析,為類似工程實踐提供了參考價值。
關鍵詞:機載pos數據;CORS;基站;差分處理
DOI:10.16640/j.cnki.37-1222/t.2016.06.245
1 引言
POS系統集GPS定位和IMU的定姿功能,能夠快速獲取機載航攝相機在空中曝光瞬間的位置和姿態信息,被廣泛應用于航空攝影中。由于POS系統在航攝過程中一直處于高速動態運行狀態中,實施定位結果精度很低,所以一般采用利用CORS站數據或者是自架基站的數據進行差分解算來提高POS結果的精度[1]。
盡管隨著全國CORS連續運行參考站和全球IGS跟蹤站的完善,絕大多數區域無需假設基站,可直接采用CORS站數據進行差分定位,就能獲取高精度的POS數據結果[2]。但由于CORS站數據不是自由獲取的,需要經過各個部門的審批,過程較長。有時候為了節省時間,人們會采用自架基站及時獲取數據。當既有CORS站數據又有基站數據情況下,哪種數據解算精度更高呢?本文通過幾個架次的解算成果進行說明。目前常用的POS數據解算軟件為Applanix公司的POSPac MMS軟件,本文的數據解算便在該軟件下執行得到。
2 數據說明
本文選擇的POS數據是由Applanix公司的POS AV510系統獲取的。目前國內POS AV510系統有IMU14(采樣頻率:250Hz)和IMU14(采樣頻率:200Hz)兩種型號。該系統的漂移誤差為0.1°/h,位置中誤差為5cm-30cm,側滾角Roll、俯仰角Pitch中誤差為0.005°,航偏角heading中誤差為0.008°。
選擇了某航攝項目3個架次的數據,分別采用CORS站及自架基站的方式進行數據解算。分析對比解算后數據精度并得出結論。
3 數據解算
選取某航攝項目3個架次的數據,分別采用CORS站及自架基站方式進行解算。其中CORS站與自架基站接收機采樣頻率均為1s,解算方式均采用single basestation(單基站)解算。首先對3個架次CORS站及自架基站離測區的距離進行統計分析,統計結果如表1所示:
從表1中得到,該攝區這3個架次的CORS站離測區距離大部分比自架基站離測區距離遠。
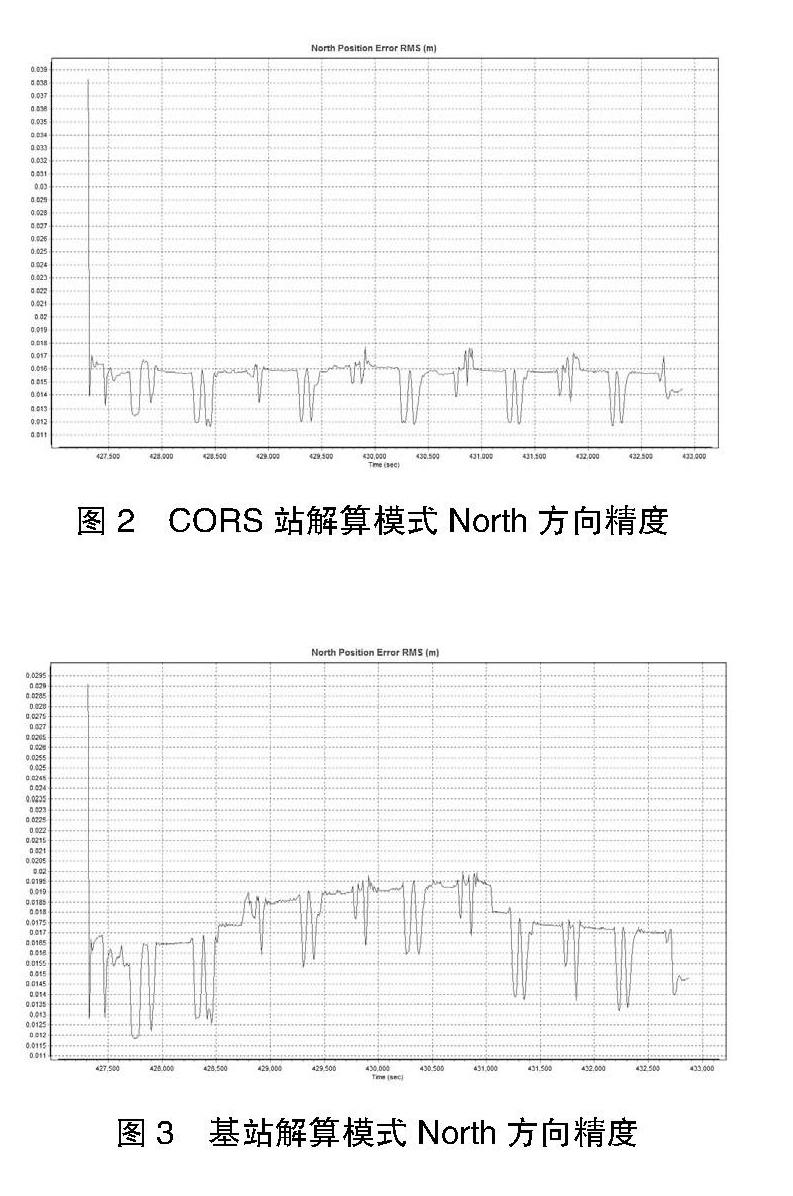
POS AV510系統的后期解算軟件為POSpac MMS,利用該軟件使用single basestation解算模式對該攝區3個架次進行解算。根據POSpac MMS軟件建議,現以其中0914架次的East數值值進行結果分析,其精度表征情況如圖2與圖3所示:
從圖2、圖3中架次的數據處理結果看,在CORS站和自架基站接收機頻率相同情況下,盡管CORS站離測區距離相比自架基站要遠,但由于采用了虛擬參考站VRS技術,其實時差分定位精度卻比自架基站精度相對要好。
4 結論
由于POS數據處理的精度,關系到航空攝影測量中影像的外方位元素的精度,進而關系到后期數字成圖的精度。因此,為了提高POS數據處理的精度,對有CORS站覆蓋的測區,優先選擇使用CORS站數據,既提高了數據精度,又減少了外業架設基站的工作,為差分定位下的POS精度的研究提供了參考價值。
參考文獻:
[1]胡艷琴.基于衛星定位基準站網的機載POS數據處理方案研究[J].2014年GPS、大地專業委員會學術年會交流論文,2014:32-35.
[2]呂煒希.CORS精度分析及應用[D].河北聯合大學,2014.
作者簡介:王薇薇(1987-),女,山東濱州人,碩士研究生,初級工程師,主要從事于機載激光雷達測量、POS航空攝影測量系統的研究與應用工作。
