一種高功率密度電動舵機的設計
2016-03-16 06:18:45段小帥
導航定位與授時
2016年1期
段小帥
(北京自動化控制設備研究所,北京100074)
一種高功率密度電動舵機的設計
段小帥
(北京自動化控制設備研究所,北京100074)
針對飛行器的速度和機動性不斷增加,對舵機的高功率和小型化等要求越來越高的問題,設計了一種高功率密度電動舵機。從一體化本體結構設計、高功率伺服電機設計和輕質化材料選用等方面對電動舵機進行了研究分析。最后對該電動舵機進行了性能測試。試驗結果表明,該電動舵機能夠承載8000N·m彎矩,并且輸出功率密度比常規電動舵機提高了50%以上。
電動舵機;高功率密度
0 引言
舵機是飛航導彈等飛行器制導控制系統的執行機構,是一種高精度的位置伺服系統,其性能直接影響飛行過程的動態品質。隨著航天技術的快速發展,飛行器的速度、射程、精度和機動性不斷增加,因此對舵機的高功率、大承載、小型化和輕質化等要求越來越高[1-2]。本文研究設計了一種電動舵機,相比于常規電動舵機,具有功率密度高和承載能力強等特點。
1 舵機功能組成
電動舵機通常由本體結構、伺服電機、傳動機構、輸出機構和反饋裝置等幾部分組成,如圖1
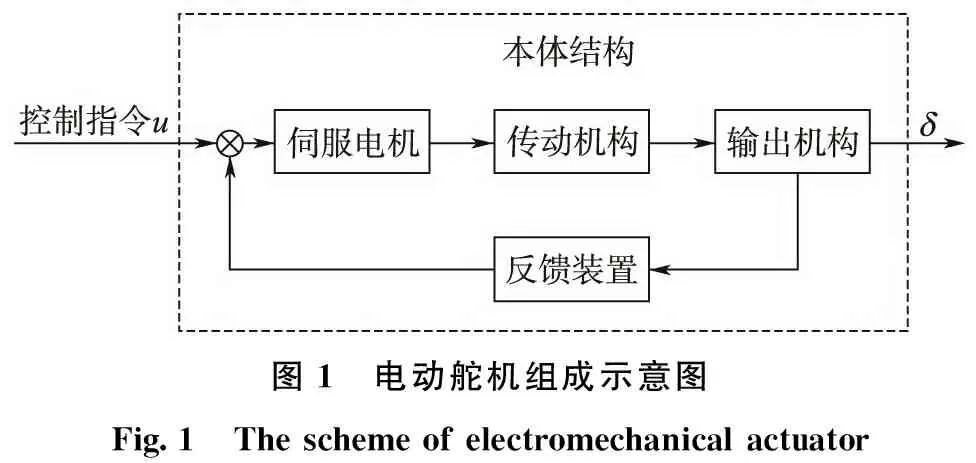
圖1 電動舵機組成示意圖Fig.1 Theschemeofelectromechanicalactuator
所示。伺服電機將電能轉化為機械能;傳動機構將伺服電機產生的高速低轉矩通過適當的減速比轉化為系統要求的低速高轉矩,并通過輸出機構傳遞給舵面;反饋裝置測量到舵偏角信號,實現系統的閉環控制;伺服電機、傳動機構、輸出機構和反饋裝置等組件最終通過舵機本體結構,集成為一臺完整的電動舵機。……
登錄APP查看全文
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50