GEO電推進(jìn)衛(wèi)星軌道漂移策略研究
2016-03-16 07:04:56趙義平李峰經(jīng)姚翔李大偉
航天器工程 2016年4期
趙義平 李峰 經(jīng)姚翔 李大偉
(中國(guó)空間技術(shù)研究院通信衛(wèi)星事業(yè)部,北京 100094)
GEO電推進(jìn)衛(wèi)星軌道漂移策略研究
趙義平 李峰 經(jīng)姚翔 李大偉
(中國(guó)空間技術(shù)研究院通信衛(wèi)星事業(yè)部,北京 100094)
為滿(mǎn)足GEO衛(wèi)星定點(diǎn)位置調(diào)整的需求,利用電推力器在GEO上的控制方法,以軌道傾角、漂移經(jīng)度和漂移率為目標(biāo),提出了一套結(jié)合南北位置保持的GEO衛(wèi)星電推進(jìn)軌道漂移策略。通過(guò)分析電推進(jìn)平臺(tái)在進(jìn)行位置保持時(shí)的電推力器控制方法,設(shè)計(jì)電推力器點(diǎn)火策略,得出了漂移階段推力器點(diǎn)火時(shí)刻及時(shí)長(zhǎng)的計(jì)算方法,并分析出漂移各個(gè)階段時(shí)間的估算公式。利用龍格庫(kù)塔法對(duì)該策略進(jìn)行了數(shù)值仿真驗(yàn)證,結(jié)果表明:文章中提出的電推進(jìn)平臺(tái)軌道漂移策略能夠在無(wú)須姿態(tài)大幅調(diào)整并不增加額外燃料消耗的基礎(chǔ)上完成對(duì)目標(biāo)經(jīng)度的軌道轉(zhuǎn)移,滿(mǎn)足漂移任務(wù)要求,并保證軌道傾角在漂移過(guò)程中穩(wěn)定在0.01°以?xún)?nèi)。
GEO衛(wèi)星;電推進(jìn);漂移;南北位置保持;點(diǎn)火策略
1 引言
由于電推進(jìn)技術(shù)具有高比沖、長(zhǎng)壽命、小推力的特點(diǎn),可顯著提高航天器的有效載荷質(zhì)量比,延長(zhǎng)其工作壽命并降低發(fā)射成本,因此在各種空間任務(wù)中,國(guó)內(nèi)外航天發(fā)展都對(duì)電推進(jìn)提出了明確的需求[1-2]。電推進(jìn)技術(shù)在航天型號(hào)中的應(yīng)用按照以下三個(gè)階段發(fā)展[3]:①階段一,完成衛(wèi)星平臺(tái)的南北位置保持(以下簡(jiǎn)稱(chēng)位保)任務(wù)。從20世紀(jì)90年代末開(kāi)始,電推進(jìn)逐漸被商業(yè)衛(wèi)星用于南北位保,化學(xué)推進(jìn)完成全部的軌道提升。當(dāng)前,南北位保仍然是高軌商業(yè)衛(wèi)星使用最多的方式。對(duì)于南北位保任務(wù),典型的電推力器XIPS-13離子推力器和SPT-100霍爾推力器,電推進(jìn)工作功率為1000 W量級(jí)。②階段二,在軌位保+部分軌道轉(zhuǎn)移任務(wù)。在南北位保任務(wù)的基礎(chǔ)上,電推進(jìn)還執(zhí)行部分軌道轉(zhuǎn)移的任務(wù),在軌道轉(zhuǎn)移最后階段做軌道提升。化學(xué)推進(jìn)則相應(yīng)地更加側(cè)重于完成軌道轉(zhuǎn)移前期的軌道提升。此階段電推進(jìn)功率達(dá)到或接近10 000 W量級(jí),一般使用兩臺(tái)5000 W量級(jí)的推力器同時(shí)工作實(shí)現(xiàn)。③階段三,位保+軌道轉(zhuǎn)移。此方式下衛(wèi)星將不配置遠(yuǎn)地點(diǎn)化學(xué)發(fā)動(dòng)機(jī),衛(wèi)星的推進(jìn)任務(wù)主要依賴(lài)電推進(jìn)實(shí)現(xiàn)。美國(guó)波音公司的BSS-702SP平臺(tái)即為典型的此類(lèi)設(shè)計(jì)方案。針對(duì)GEO衛(wèi)星的電推進(jìn)技術(shù),我國(guó)現(xiàn)在已經(jīng)提出了應(yīng)用電推進(jìn)系統(tǒng)完成南北位保任務(wù),隨著電推進(jìn)應(yīng)用的發(fā)展,也開(kāi)始對(duì)在各類(lèi)軌道上作機(jī)動(dòng)應(yīng)用,如:在GTO的軌道轉(zhuǎn)移、東西位保等方面做了大量研究[4-5]。
除位保軌道機(jī)動(dòng)任務(wù)外,有些通信衛(wèi)星在壽命期間可能需要在不同定點(diǎn)位置進(jìn)行多次定點(diǎn)位置變更,實(shí)現(xiàn)不同經(jīng)度之間的漂移。這類(lèi)軌道機(jī)動(dòng)任務(wù)一般用化學(xué)推進(jìn)非常容易實(shí)現(xiàn),若用電推力器控制實(shí)現(xiàn),當(dāng)位置調(diào)整經(jīng)度差較大時(shí),其經(jīng)歷的時(shí)間較長(zhǎng),在漂移過(guò)程中的傾角保持控制不能忽略,則不僅需考慮漂移啟動(dòng)和再次定軌捕獲,還需考慮如何有效地消除漂移期間積累的軌道傾角控制量,這就對(duì)電推力器的控制策略提出了新的要求。本文通過(guò)對(duì)BSS-702系列衛(wèi)星電推力器控制方式的研究,提出了一套GEO衛(wèi)星電推進(jìn)漂移策略,借助于推力器的傾斜安裝,在利用原南北位保策略對(duì)軌道傾角保持的同時(shí),不額外消耗推進(jìn)劑完成位置漂移。
2 GEO衛(wèi)星電推力器軌道控制原理
與傳統(tǒng)的化學(xué)推力器相比,電推力器最顯著的特點(diǎn)是推力小和比沖高。以波音公司的BSS-702系列衛(wèi)星平臺(tái)為例,在GEO上電推力器控制推力為0.079 N[6],為雙組元化學(xué)推力器推力的3.5‰,位置保持周期一般控制在14 d,為了達(dá)到相同控制效果的同時(shí)減少弧度損失,需要增加提高電推力器的點(diǎn)火頻度,將控制量分散到每天進(jìn)行。控制頻度的增大有助于縮小攝動(dòng)造成的衛(wèi)星漂移范圍,提高衛(wèi)星軌道根數(shù)的控制精度。
電推進(jìn)平臺(tái)使用了4臺(tái)電推力器進(jìn)行東西和南北方向的位保,4臺(tái)電推力器安裝在背地板上,南北兩側(cè)每側(cè)兩臺(tái),對(duì)稱(chēng)安裝于背地板外表面靠近南北隔板的位置,具體形式如圖1所示[7]。在不考慮角動(dòng)量卸載的環(huán)境下,4個(gè)推力器矢量方向都指向衛(wèi)星的質(zhì)心,電推進(jìn)平臺(tái)4個(gè)推力器的初始安裝角度相同,為方便計(jì)算和論述,本文假設(shè)相關(guān)角度如下:與x軸的夾角為ψ=80.00°,與y軸的夾角為γ=50.00°,與z軸的夾角為θ=41.75°,如圖2所示。其中推力器1為NW(北西)方向的推力器,推力器2為NE(北東)方向的推力器,推力器3為SW(南西)方向的推力器,推力器4為SE(南東)方向的推力器。在衛(wèi)星本體坐標(biāo)系中,切向(T)方向以x軸正向?yàn)檎ㄏ?N)方向以y軸負(fù)向方向?yàn)檎瑥较?R)方向以z軸正向?yàn)檎魍屏ζ髟诟鞣较虻姆?hào)如表1所示。
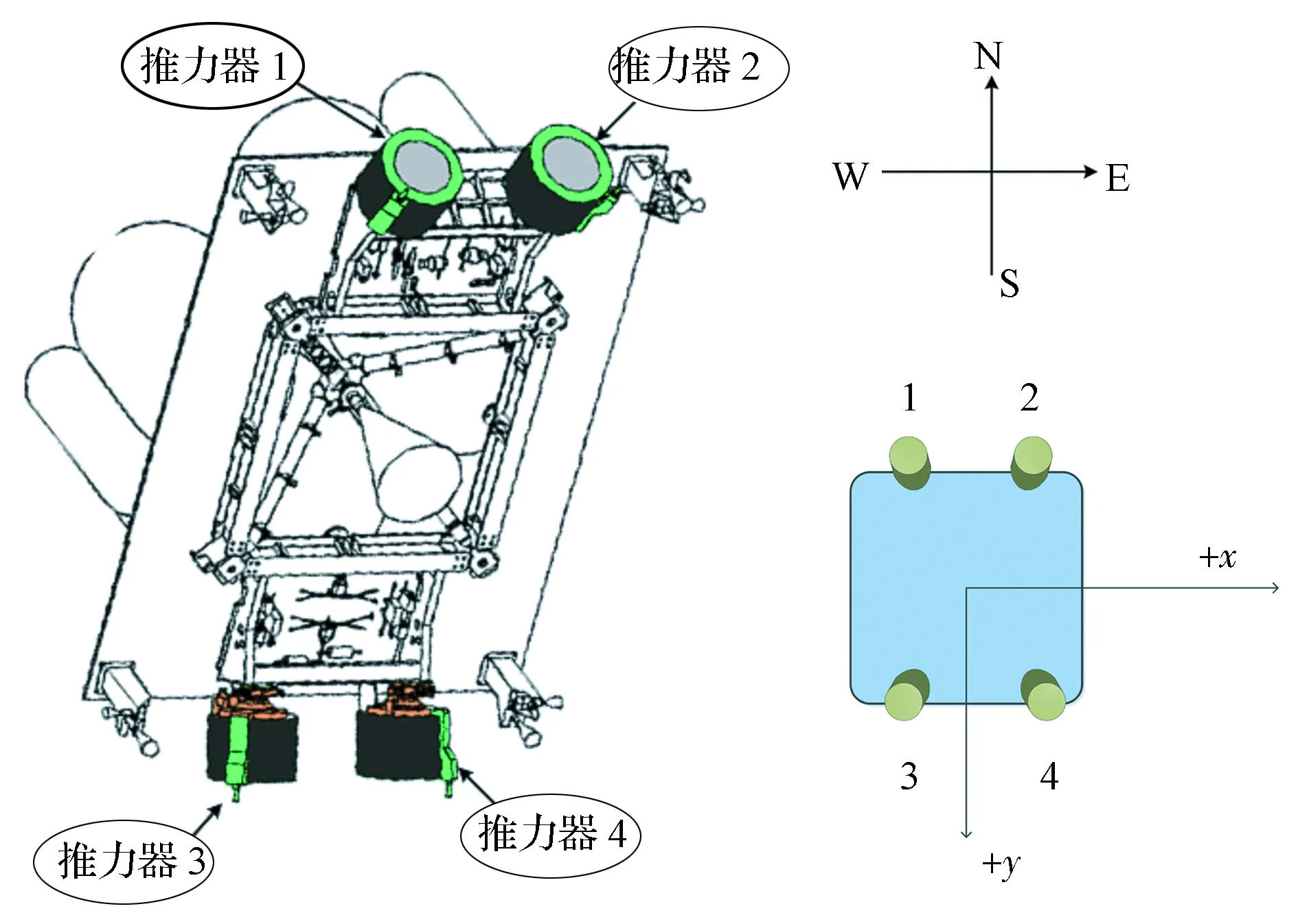
圖1 電推力器布局Fig.1 Layout of electric thrusters
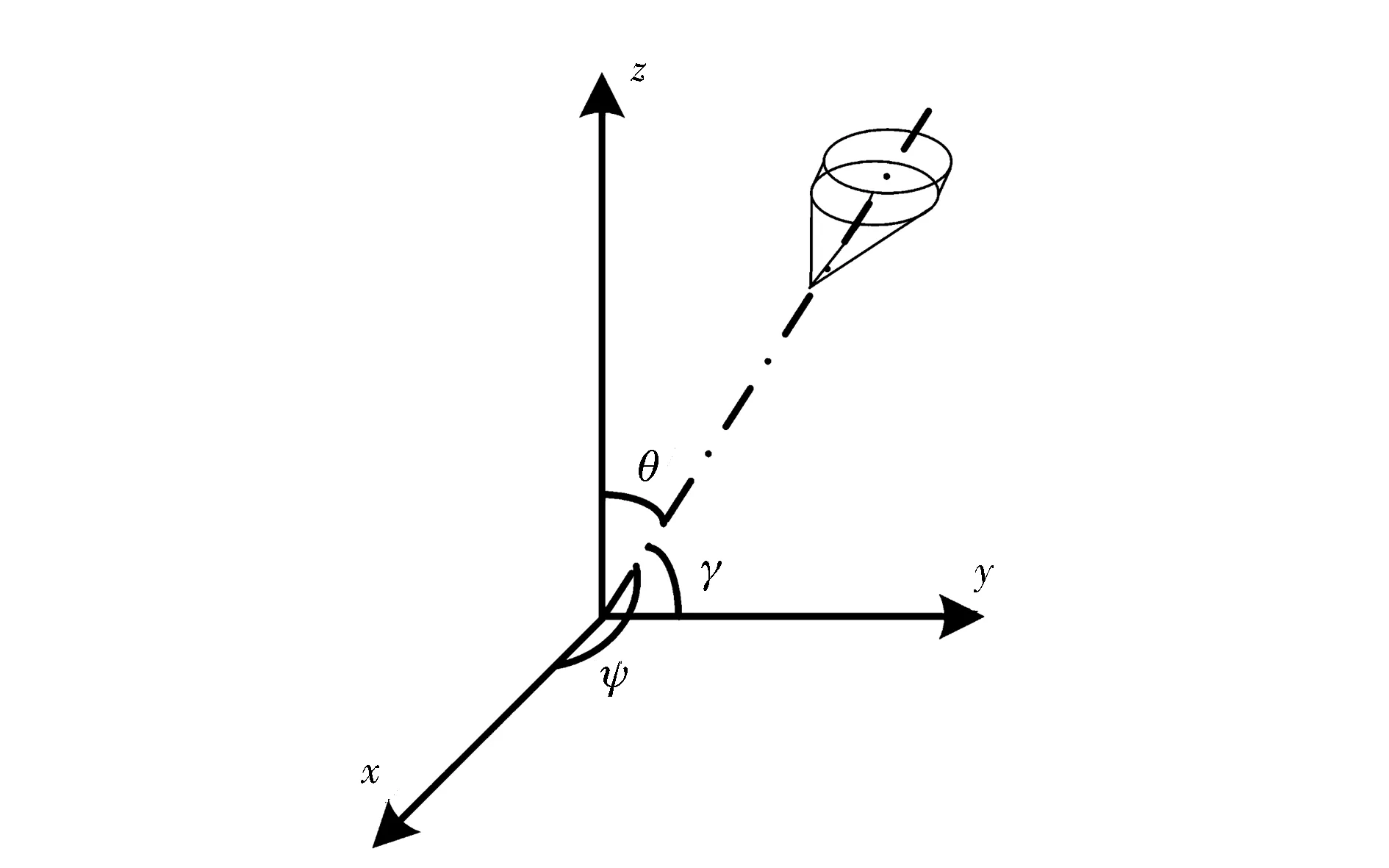
圖2 電推力器安裝角度Fig.2 Installation angle of electric thrusters
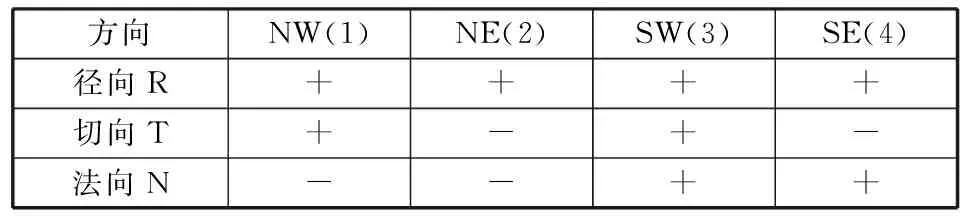
方向NW(1)NE(2)SW(3)SE(4)徑向R++++切向T+-+-法向N--++
根據(jù)圖1中電推力器的布局可得,推力器1、2提供指向南邊的法向力,推力器3、4提供指向北邊的法向力。同時(shí)推力器1、3產(chǎn)生指向東邊的切向力,提升軌道;推力器2、4產(chǎn)生指向西邊的切向力,降低軌道。4臺(tái)推力器在徑向方向的力全都指向地心方向。
日月引力攝動(dòng)導(dǎo)致衛(wèi)星軌道的傾角矢量發(fā)生變化,其傾角攝動(dòng)率幅值為0.75~0.96 (°)/a,攝動(dòng)方向近似沿著赤經(jīng)90°和270°方向[8]。在一天的控制周期內(nèi),需在90°赤經(jīng)處附近推力器1、2進(jìn)行點(diǎn)火,在赤經(jīng)270°附近推力器3、4點(diǎn)火,能夠消除攝動(dòng)對(duì)傾角的影響。
由于推力器1、2與推力器3、4的點(diǎn)火赤經(jīng)相差180°,因此兩對(duì)推力對(duì)偏心率產(chǎn)生的控制作用在徑向上正好相反,若推力器1、2在徑向上控制量之和與推力器3、4的正好相等,那么在一天的控制周期內(nèi)它們對(duì)偏心率的徑向控制作用正好抵消。同時(shí)為了消除切向推力對(duì)偏心率的影響,需要保持推力器1和3控制量相等,推力器2和4控制量相等,這樣就保證了對(duì)傾角方向的控制不影響軌道的偏心率變化。
推力器1、3與推力器2、4兩對(duì)推力對(duì)經(jīng)度漂移率的控制作用正好相反,推力器1、3產(chǎn)生向東邊的切向力提升軌道,使經(jīng)度向東的漂移率減小,推力器2、4產(chǎn)生向西邊的切向力降低軌道,使經(jīng)度向東的漂移率增大;漂移率為λ=-540Δa/as[(°)/d],其中Δa為軌道半長(zhǎng)軸偏差量,as為靜止軌道半徑。這樣在一個(gè)控制周期內(nèi)通過(guò)控制這兩對(duì)推力的差值,可以實(shí)現(xiàn)對(duì)經(jīng)度漂移率的控制,進(jìn)而完成對(duì)衛(wèi)星經(jīng)度位置的控制。
在使用電推力器進(jìn)行位置保持時(shí),根據(jù)電推進(jìn)控制原理,每個(gè)控制周期長(zhǎng)度設(shè)定為一天。在這一個(gè)控制周期內(nèi),4臺(tái)推力器按照1→2→3→4的開(kāi)機(jī)順序依次點(diǎn)火,控制軌道傾角矢量和經(jīng)度漂移速度[8-9],具體開(kāi)機(jī)位置見(jiàn)圖3。
根據(jù)高斯攝動(dòng)方程積分后可解得速度增量與軌道根數(shù)控制量的關(guān)系[10]為
(1)
式中:Vs為靜止軌道衛(wèi)星速度,l0為開(kāi)機(jī)赤經(jīng)。令kT=cosψ=0.174,kR=cosγ=0.643,kN=cosθ=0.746。
通過(guò)GEO軌道的攝動(dòng)規(guī)律,可計(jì)算得每天所需控制的軌道傾角變化量為Δi,偏心率的變化量為Δex,Δey,漂移率每天的變化量為ΔD,代入式(1)可以求得控制周期內(nèi)四個(gè)推進(jìn)器產(chǎn)生的速度增量分別為ΔV1,ΔV2,ΔV3,ΔV4,如表2所示。進(jìn)而求得推力器點(diǎn)火時(shí)間分別為Δt1,Δt2,Δt3,Δt4,其在10個(gè)周期內(nèi)結(jié)果如圖4~6所示。
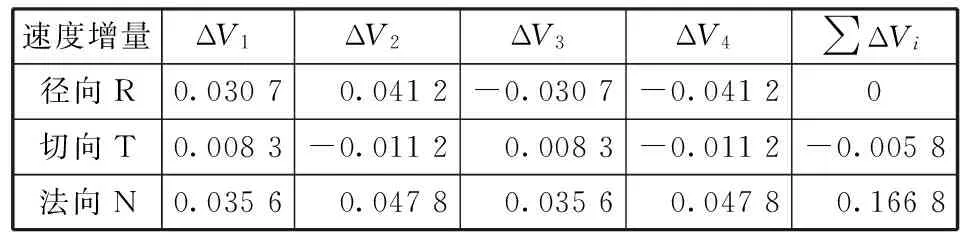
表2 一個(gè)周期內(nèi)衛(wèi)星各方向上的速度增量Table 2 Velocity increment in each direction in a cycle m/s
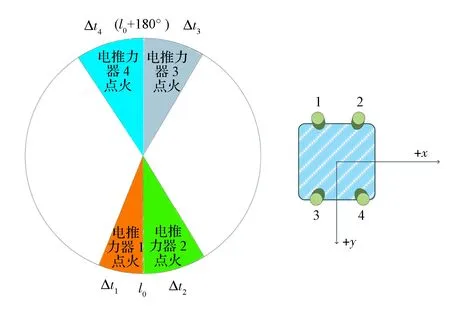
圖3 控制周期內(nèi)推力器點(diǎn)火位置Fig.3 Ignition position of thrusters in the control period
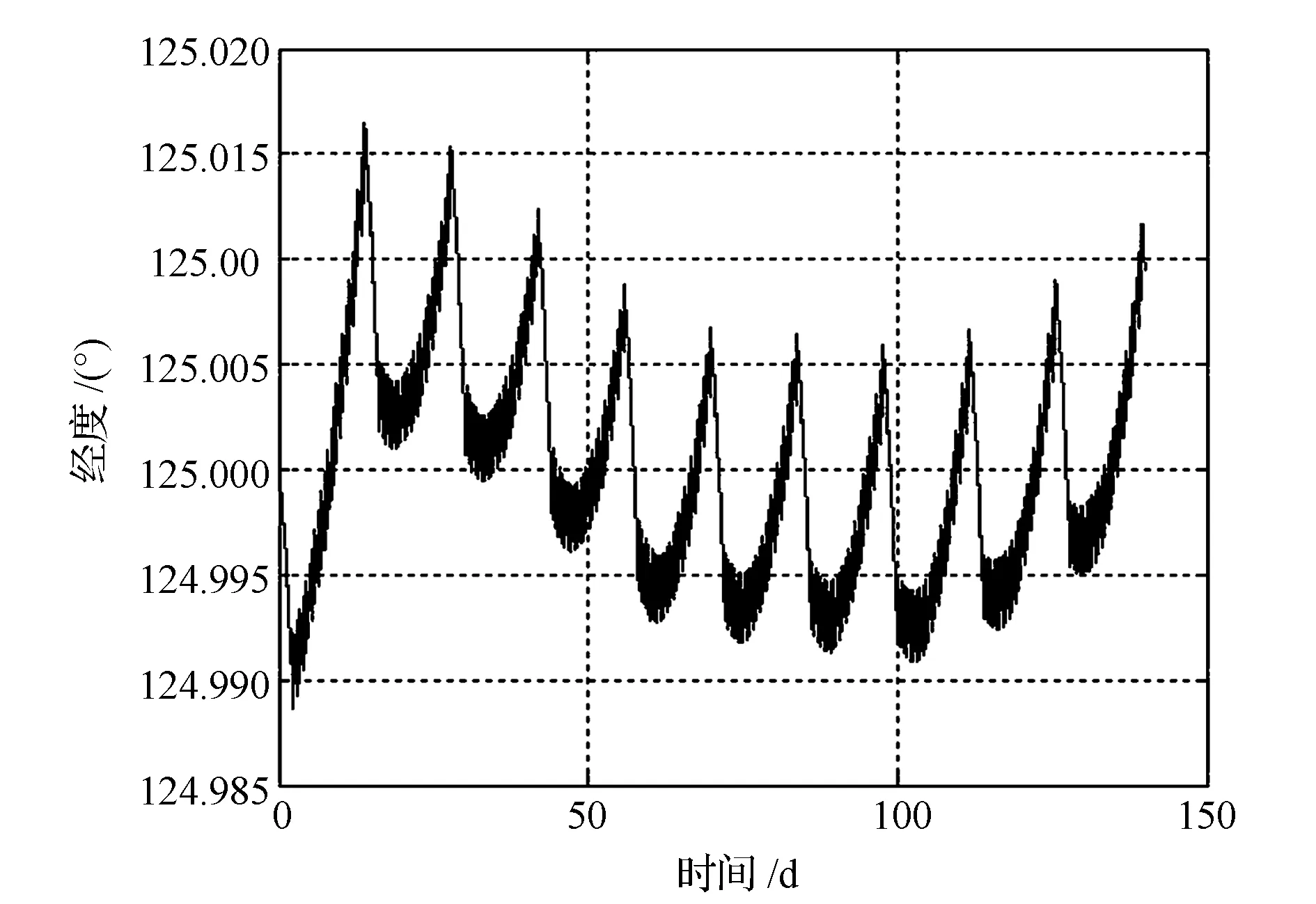
圖4 星下點(diǎn)經(jīng)度變化曲線(xiàn)Fig.4 Changing curve of subsatellite point longitude

圖5 軌道傾角變化曲線(xiàn)Fig.5 Curve of orbit inclination

圖6 偏心率變化曲線(xiàn)Fig.6 Curve of eccentricity
3 電推進(jìn)軌道漂移策略
3.1 一般衛(wèi)星軌道漂移策略
對(duì)于一般衛(wèi)星進(jìn)行軌道漂移任務(wù),使用化學(xué)推力器提供速度增量,控制切向速度大小來(lái)調(diào)整軌道高度,達(dá)到改變漂移率的目的。其中往返漂移需要速度增量按照霍曼(Hohmann)軌道轉(zhuǎn)移方式計(jì)算得到。漂移模式軌道機(jī)動(dòng)策略如下:①衛(wèi)星從初始軌位沿切向施加負(fù)速度增量ΔV1,降低軌道半長(zhǎng)軸,衛(wèi)星向東漂移一直到某個(gè)位置附近;②衛(wèi)星沿切向施加正速度增量ΔV2,進(jìn)行位置捕獲,回到GEO。另一個(gè)方向控制方法相同。
當(dāng)使用電推進(jìn)平臺(tái)完成漂移任務(wù)時(shí),若直接按照化學(xué)推力器方法進(jìn)行漂移控制,提供切線(xiàn)方向的推力,需要按如圖7所示在開(kāi)始漂移時(shí)調(diào)整姿態(tài)使點(diǎn)火時(shí)對(duì)地板指向切線(xiàn)方向。單臺(tái)推力器連續(xù)點(diǎn)火1天可產(chǎn)生1 (°)/d的漂移率。同理進(jìn)行位置再捕獲時(shí),點(diǎn)火方向相反。但是這種方法點(diǎn)火期間無(wú)法滿(mǎn)足通信衛(wèi)星對(duì)地板保持對(duì)地的條件,測(cè)控會(huì)有丟失,衛(wèi)星姿態(tài)的控制和調(diào)整過(guò)于頻繁,不利于操作。另外,這種控制方式在各方向上推力存在耦合,尤其不利于位置捕獲,可結(jié)合電推力器進(jìn)行位置保持采用的控制方法來(lái)制定一套GEO衛(wèi)星的漂移策略。
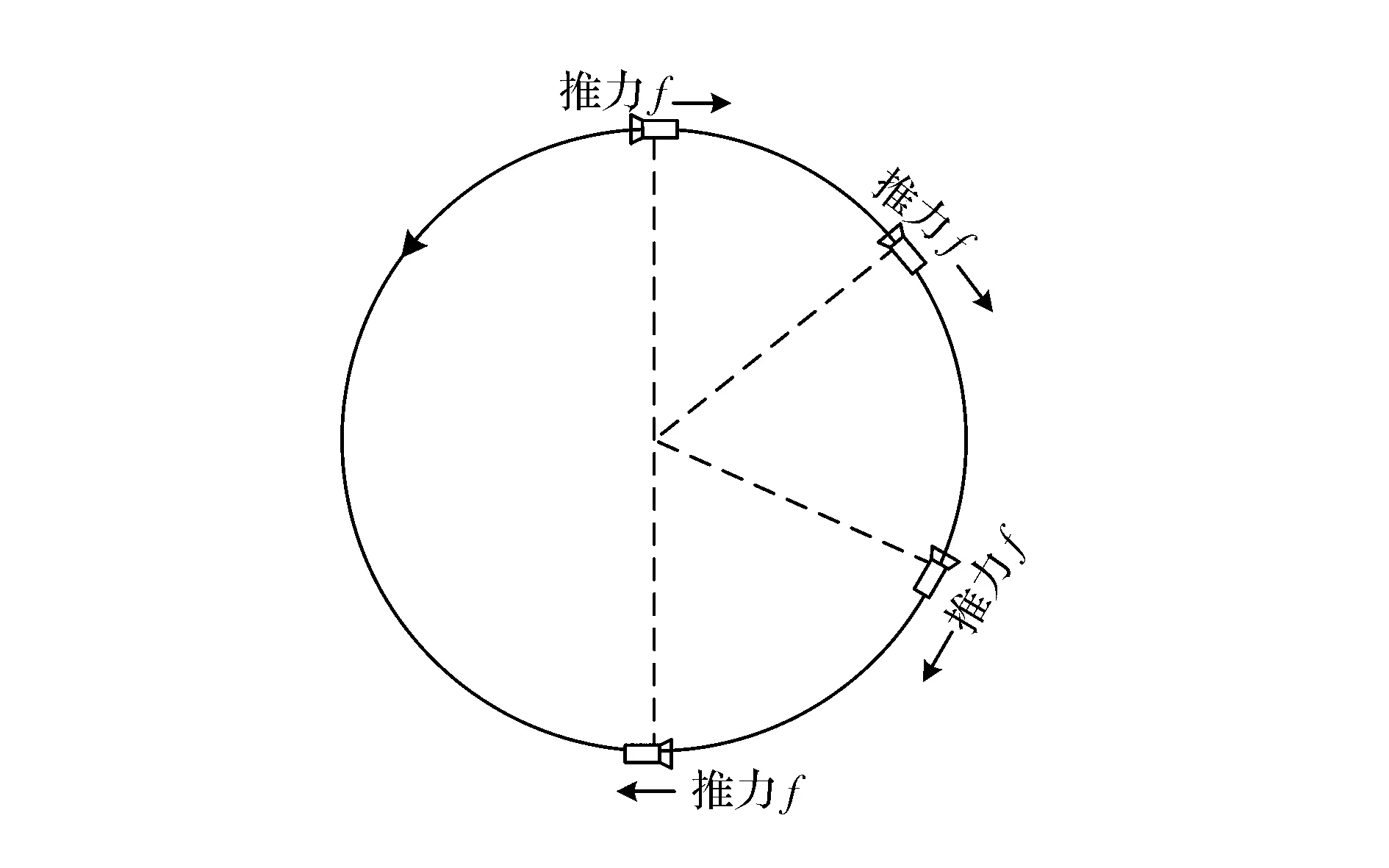
圖7 電推進(jìn)點(diǎn)火策略Fig.7 Electric propulsion ignition strategy
3.2 結(jié)合南北位保的電推進(jìn)軌道漂移策略
通過(guò)對(duì)電推力器位保策略的分析,考慮通過(guò)調(diào)整4臺(tái)電推力器的各自的點(diǎn)火時(shí)間,使衛(wèi)星完成南北位保任務(wù)的情況下,進(jìn)行軌位的漂移。
整個(gè)漂移階段分為起漂階段和到位捕獲階段兩個(gè)部分。以向東漂移的任務(wù)為例,首先讓漂移率增大進(jìn)行起漂,此時(shí)在控制周期內(nèi),推力器2、4每天輪流點(diǎn)火,控制軌道傾角矢量,增大經(jīng)度向東漂移速度,具體開(kāi)機(jī)位置見(jiàn)8(a)。每天點(diǎn)火的總控制量與表2中相同并保持每天法向N控制量相同,各方向控制量具體數(shù)值見(jiàn)表3。當(dāng)起漂階段結(jié)束后,漂移任務(wù)隨即進(jìn)入到位捕獲階段,為了便于位置捕獲,需要及時(shí)地減小衛(wèi)星的漂移率。因此需要選擇合適的起漂時(shí)間和到位捕獲時(shí)間。此時(shí)在控制周期內(nèi),推進(jìn)器1、3每天輪流點(diǎn)火,控制軌道傾角矢量,減小經(jīng)度漂移速度,具體開(kāi)機(jī)位置見(jiàn)圖8(b)。每天點(diǎn)火的總控制量與表2中相同并保持每天發(fā)現(xiàn)N方向控制量相同,各方向控制量具體數(shù)值見(jiàn)表4。其中如圖8所示,Δt3′=Δt4′=Δt3+Δt4,Δt1′=Δt2′=Δt1+Δt2。在向西漂移任務(wù)中,控制方法與上述類(lèi)似。
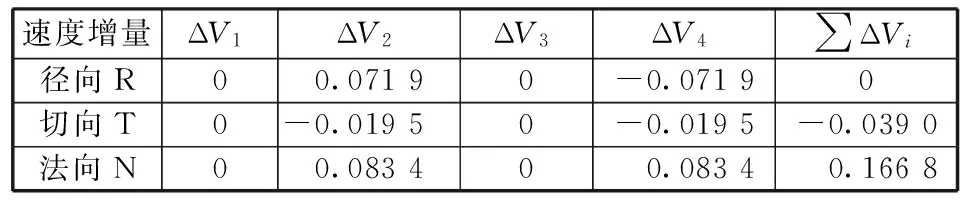
表3 起漂時(shí)一個(gè)周期內(nèi)衛(wèi)星各方向上的速度增量Table 3 Velocity increment in each direction in a cycle in the openning phase m/s
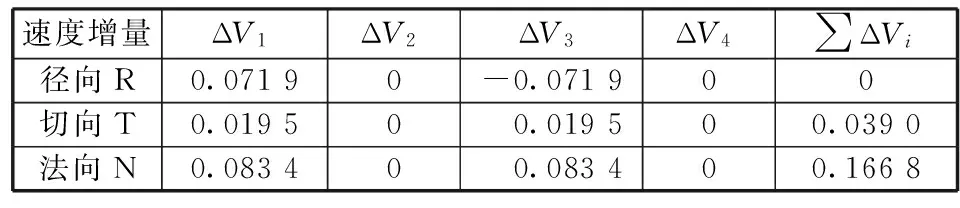
表4 到位捕獲時(shí)一個(gè)周期內(nèi)衛(wèi)星各方向上的速度增量Table 4 Velocity increment in each direction in a cycle in the closing phase m/s
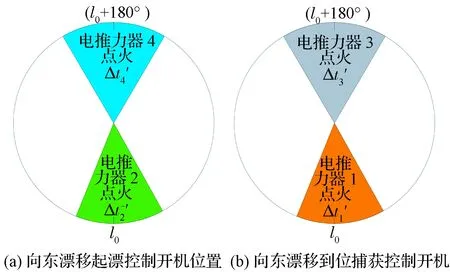
圖8 向東漂移起漂和到位捕獲開(kāi)機(jī)位置Fig.8 Fire positions of augmenting drift control and reducing drift control to the east
在漂移階段自然攝動(dòng)每天產(chǎn)生漂移率的變化和控制下每天產(chǎn)生的漂移率變化小了一個(gè)量級(jí),忽略自然攝動(dòng)的影響,不會(huì)影響漂移策略的制定,可能會(huì)造成時(shí)間估計(jì)上的微小偏差,用這種近似方法給出每天點(diǎn)火開(kāi)始時(shí)間和點(diǎn)火長(zhǎng)度,用仿真的方法計(jì)算出準(zhǔn)確整個(gè)漂移任務(wù)的時(shí)間。因此,起漂時(shí)間和到位捕獲時(shí)間的確定中可認(rèn)為起漂階段漂移率每天的變化量ΔD1和到位捕獲階段漂移率每天的變化量ΔD2相同,且為常值,通過(guò)式(1)可以計(jì)算出來(lái)。整個(gè)漂移任務(wù)是一個(gè)經(jīng)度漂移速度先增大后減小的過(guò)程,其變化如圖9和圖10所示。以向東漂移任務(wù)為例,設(shè)向東漂移Δλ,起漂階段漂移率增大,設(shè)時(shí)間為m天;到位捕獲階段漂移率減少,設(shè)時(shí)間為n天。綜上可得
(2)
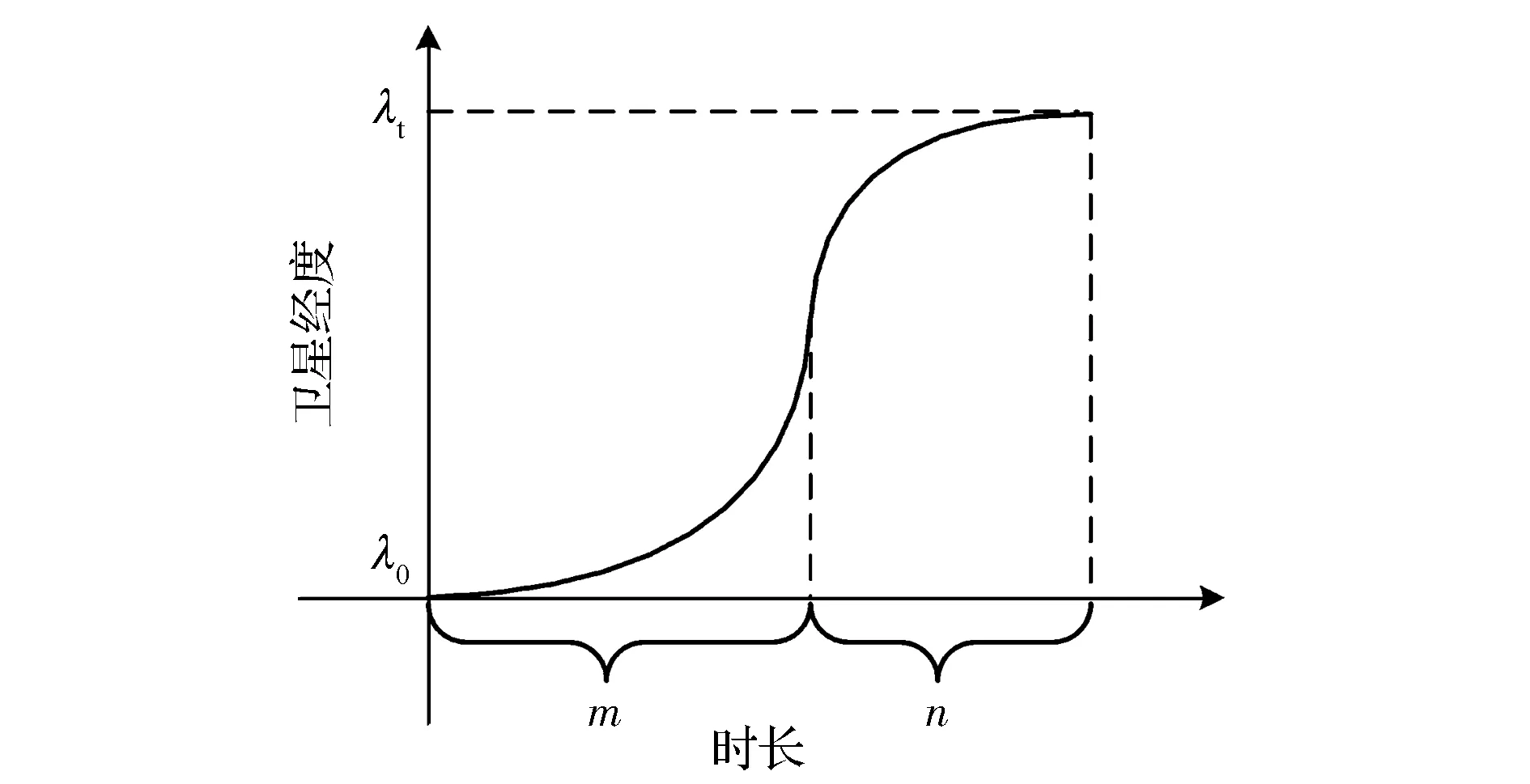
圖9 衛(wèi)星經(jīng)度隨時(shí)間的變化曲線(xiàn)Fig.9 Curve of the satellite longitude
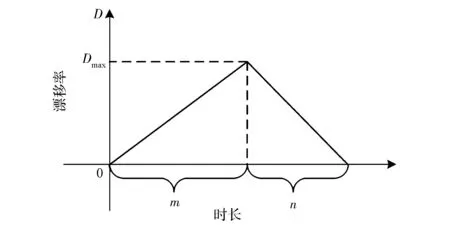
圖10 衛(wèi)星漂移率隨時(shí)間的變化曲線(xiàn)Fig.10 Curve of the satellite drift rate
根據(jù)上述方法估算得不同漂移經(jīng)度差所需要花費(fèi)時(shí)間近似結(jié)果如表5所示。
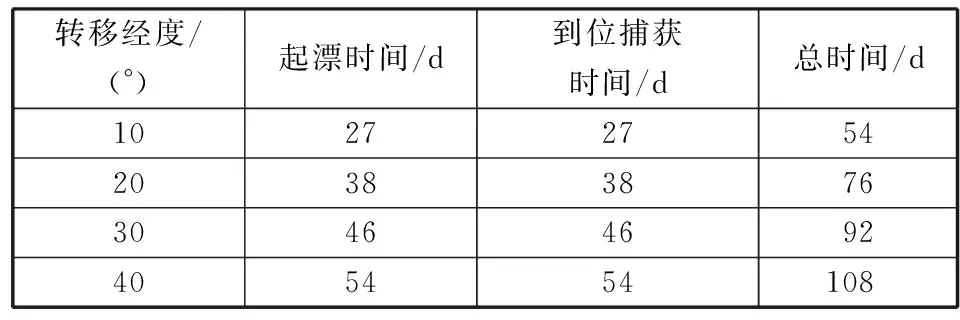
表5 轉(zhuǎn)移經(jīng)度差與時(shí)間的估計(jì)Table 5 Estimation relationship between time and changing longitude
因此,漂移過(guò)程中每天的傾角和偏心率控制與位保期間相同,漂移率先增大后減小,即充分利用了各方向推力分量,與圖7相比又無(wú)需對(duì)姿態(tài)進(jìn)行大幅度調(diào)整,即可完成衛(wèi)星的漂移任務(wù)。
4 仿真驗(yàn)證
從2016年4月1日0時(shí)0分開(kāi)始漂移任務(wù),設(shè)定目標(biāo)經(jīng)度轉(zhuǎn)移值為10°,通過(guò)計(jì)算確定每天點(diǎn)火時(shí)長(zhǎng)為1961 s,衛(wèi)星從125°漂移并且重新定點(diǎn)在135°。仿真時(shí)考慮了地球非球形引力以及日月引力攝動(dòng)因素,大約54 d完成整個(gè)漂移控制過(guò)程。利用數(shù)值積分外推出電推力器控制下的受控軌道,驗(yàn)證漂移軌道策略的正確性。
由圖11表明經(jīng)過(guò)54 d漂移控制后衛(wèi)星最后穩(wěn)定在135°附近,完成了軌道漂移任務(wù)。由圖12可以看出調(diào)整推力器點(diǎn)火方法后的漂移率近似線(xiàn)性變化(中間的停頓是因?yàn)樵诳刂浦芷谇皟商焯幱谧杂善茰y(cè)軌狀態(tài)):在起漂階段,漂移率接近直線(xiàn)上升;到位捕獲階段,衛(wèi)星漂移率接近直線(xiàn)下降。在漂移結(jié)束時(shí)衛(wèi)星的漂移率在零點(diǎn)附近,完成了衛(wèi)星在目標(biāo)軌位的到位捕獲。圖11與圖12中對(duì)經(jīng)度漂移的曲線(xiàn)與理論曲線(xiàn)圖9和圖10相同,從而驗(yàn)證了漂移時(shí)間計(jì)算方法的正確性。圖13顯示的是在漂移過(guò)程中衛(wèi)星軌道的半長(zhǎng)軸隨經(jīng)度的變化,衛(wèi)星的半長(zhǎng)軸在轉(zhuǎn)移過(guò)程中先減小后增大,趨勢(shì)和漂移率變化基本相符,最后半長(zhǎng)軸大小回到了初始點(diǎn)附近,表明漂移任務(wù)結(jié)束時(shí)衛(wèi)星到位捕獲完成。
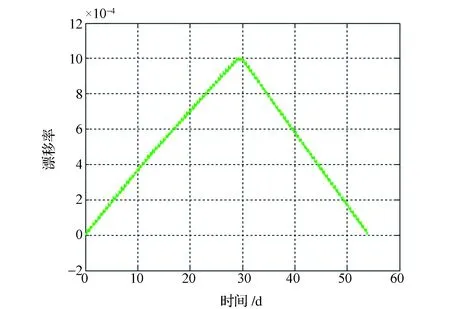
圖 12 漂移過(guò)程中漂移率的變化曲線(xiàn)Fig.12 Curve of the drift rate in the drifting
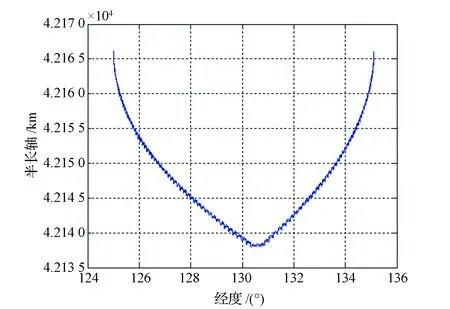
圖13 漂移過(guò)程中半長(zhǎng)軸隨經(jīng)度的變化Fig.13 Semi-major axis vs longitude in the drifting
由圖14可得,雖然漂移策略中電推力器點(diǎn)火方法與保持控制略有不同,在漂移過(guò)程衛(wèi)星的傾角均保持在0.01°以下,說(shuō)明漂移過(guò)程南北位保控制是成功的,驗(yàn)證了該策略能夠在完成軌道漂移任務(wù)的同時(shí)滿(mǎn)足南北位保任務(wù)的要求。圖15表明在該策略下能夠保證衛(wèi)星的偏心率沒(méi)有受到干擾。

圖14 漂移過(guò)程中傾角的變化曲線(xiàn)Fig.14 Curve of inclination in the drifting

圖15 漂移過(guò)程中偏心率的變化曲線(xiàn)Fig.15 Curve of eccentricity in the drifting
5 結(jié)束語(yǔ)
由于電推力器特殊的安裝方式以及其小推力的特點(diǎn),當(dāng)使用電推進(jìn)平臺(tái)完成軌道漂移任務(wù)時(shí),無(wú)法同使用化學(xué)推力器的衛(wèi)星一樣按照Hohmann軌道轉(zhuǎn)移方式完成軌道漂移。本文在對(duì)電推進(jìn)軌道控制原理的研究基礎(chǔ)上,提出了一套結(jié)合南北位置保持的GEO電推進(jìn)衛(wèi)星軌道漂移策略。該方法在1個(gè)周期內(nèi)提供速度增量為0.223 6 m/s,與位保控制中提供速度增量相同,不需要消耗額外的推進(jìn)劑,且在漂移過(guò)程中對(duì)地板始終指向地,也無(wú)須對(duì)姿態(tài)進(jìn)行大幅調(diào)整,這樣在保證衛(wèi)星的傾角、偏心率控制與位保期間相同的基礎(chǔ)上,即可完成軌道漂移任務(wù)。推力器分時(shí)使用的策略通過(guò)仿真驗(yàn)證時(shí)正確的仿真結(jié)果,可應(yīng)用于工程實(shí)施,為今后我國(guó)電推進(jìn)平臺(tái)軌道機(jī)動(dòng)任務(wù)提供參考。
References)
[1] 張郁.電推進(jìn)技術(shù)的研究應(yīng)用現(xiàn)狀及其發(fā)展趨勢(shì)[J].火箭推進(jìn),2005,31(2):27-36
Zhang Yu. Current status and trend of electric propulsion technology development and application[J].Journal of Rocket Propulsion,2005,31(2):27-36 (in Chinese)
[2]黃良甫. 電推進(jìn)系統(tǒng)發(fā)展概況與趨勢(shì)[J]. 真空與低溫,2005,11(1): 1-9
Huang Liangfu. The development situation and direction on electric propulsion[J]. Vacuum & Cryogenic,2005,11(1): 1-9 (in Chinese)
[3]田立成,王小勇,張?zhí)炱?空間電推進(jìn)應(yīng)用及技術(shù)發(fā)展趨勢(shì)[J]. 火箭推進(jìn),2015,41(3): 7-14
Tian Licheng,Wang Xiaoyong,Zhang Tianping. Application and development trend of space electric propulsion technology[J]. Journal of Rocket Propulsion,2015,41(3): 7-14 (in Chinese)
[4]段傳輝,陳荔瑩. GEO衛(wèi)星全電推進(jìn)技術(shù)研究及啟示[J]. 航天器工程,2013,22(3): 99-103
Duan Chuanhui,Chen Liying. Research and inspiration of all-electric propulsion technology for GEO satellite[J]. Spacecraft Engineering,2013,22(3): 99-103 (in Chinese)
[5]田百義,黃美麗,馮昊,等. GEO衛(wèi)星電推進(jìn)與化學(xué)推進(jìn)組合變軌方案研究[J]. 航天器工程,2015,24(3): 28-33
Tian Baiyi,Huang Meili,Feng Hao,et al. Orbit transfer concept for GEO satellite by combination of electric and chemical propulsion[J]. Spacecraft Engineering,2015,24(3): 28-33 (in Chinese)
[6]Steven A Feuerborn,David A Neary. Finding a way: Boeing’s “All Electric Propulsion Satellite”[C]// 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference. Washington D.C.: AIAA,2013
[7]Bernard Anzel. Station keeping the Hughes HS702 satellite with a xenon ion propulsion system[C]//49th IAF/IAA/AIAA International Astronautical Congress. Berlin: IAF,1998
[8]周志成. 通信衛(wèi)星工程[M]. 北京:中國(guó)宇航出版社,2014
Zhou Zhicheng. Telecommunication engineering[M]. Beijing: China Astronautics Press,2014 (in Chinese)
[9]Dan M Goebel,Manuel Martinez Lavin,Thomas A Bond,et al. Performance of XIPS electric propulsion in on-orbit station keeping of the Boeing 702 spacecraft[C]// 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Washington D.C.: AIAA,2002
[10] 楊嘉墀. 航天器軌道動(dòng)力學(xué)與控制[M]. 北京:中國(guó)宇航出版社,2009
Yang Jiachi. Spacecraft orbit dynamics and control[M].Beijing: China Astronautics Press,2009 (in Chinese)
(編輯:張小琳)
Strategy of GEO Electric Propulsion Satellite Orbit Drift
ZHAO Yiping LI Feng JING Yaoxiang LI Dawei
(Institute of Telecommunication Satellite,China Academy of Space Technology,Beijing 100094,China)
With target the orbit inclination,drift longitude and drift rate as targets,a trajectory drift strategy of the GEO satellite on electric propulsion platform is presented for the GEO satellite stationary position adjustment mission by using electric propulsion control technique. Referring to electric propulsion control law,the fire position and duration are figured out and the estimation formulas for the durations in the drift stages are analyzed based on the GEO satellite perturbation theory. The result validated with the numerical simulation by Runge-Kutta shows that the drift strategy for the electric propulsion platform mentioned in the article satisfies the mission’s demands for longitude variation and drift rate and ensures the inclination below the 0.01° without attitude adjustment and additional fuel.
GEO satellite; electric propulsion; drift; north-south station keeping; ignition strategy
2016-05-05;
2016-06-17
趙義平,男,碩士研究生,研究方向?yàn)楹教炱鲃?dòng)力學(xué)。Email:zyp50601@163.com。
V474.2
A
10.3969/j.issn.1673-8748.2016.04.004
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14