基于ROS的機械臂軌跡規劃研究
2016-03-16 09:33:31劉汝佳
導航定位與授時 2016年6期
關鍵詞:機械
劉汝佳,王 芳,張 強,李 楠
(航天科工智能機器人有限責任公司,北京 100074)
基于ROS的機械臂軌跡規劃研究
劉汝佳,王 芳,張 強,李 楠
(航天科工智能機器人有限責任公司,北京 100074)
針對機械臂軌跡規劃中算法復雜、開發難度高的技術難點,提出基于一款開源軟件平臺(Robot Operating System,ROS)為機械臂搭建控制系統的方法作為解決方案。在此基礎上,設計了一種基于五次多項式插值的算法來彌補該開源軟件平臺中關于軌跡規劃功能的不足,并通過仿真實驗驗證了改進后的控制算法可以提高機械臂控制性能。該方法對于實現工程機械臂軌跡規劃問題具有普遍的指導意義。
機器人;機械臂;ROS;運動控制;軌跡規劃
0 引言
機械臂在工業生產中有著廣泛的應用,例如使用機械臂來搬運貨物、組裝產品等。機械臂技術中普遍遇到的難題之一是高精度的軌跡規劃[1-3],這也是機械臂技術研究中最重要的一環。傳統的研究機械臂軌跡規劃問題的方法需要根據每一款具體的臂搭建符合實際情況的控制系統[4-5],涉及末端軌跡規劃、運動學逆解、干涉與約束算法以及關節細插值等過程,這一過程工作量大、耗時長,難以在高效率的現代社會普遍應用。如今機器人軟件開發平臺的快速發展為解決這一技術難題提供了新的思路[6-7]。
所謂的機器人軟件開發平臺,是指用來給多種機器人設備開發程序的軟件包集。它一般具備下列特點:
1)統一的編程、編譯環境;
2)可重用的組件庫;
3)具備一定的仿真、模擬條件;
4)對多款機器人設備的硬件提供驅動支持(留有二次開發驅動的接口);
5)包含一些常用的、模塊化的控制功能組件,例如導航技術、計算機視覺技術、機械臂運動控制等。
現在常用的機器人軟件平臺如表1所示。
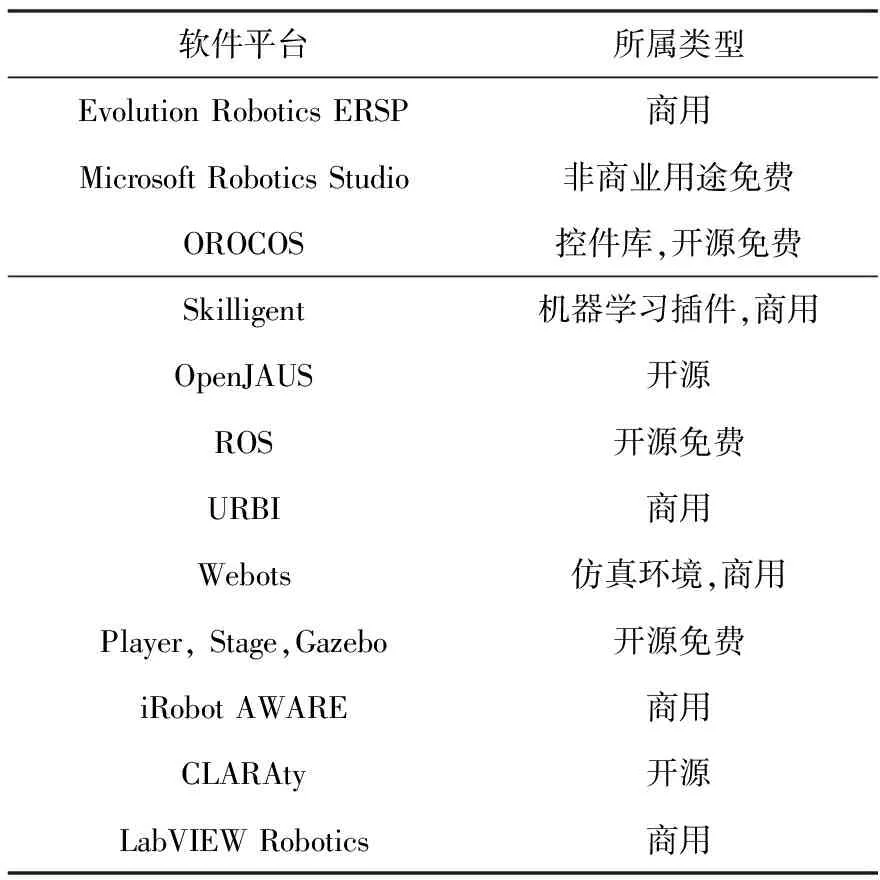
表1 機器人軟件開發平臺
本文中選用的開發平臺是由Willow Garage公司開發的機器人操作系統ROS (Robot Operating System)。ROS在構建機器人控制系統方面非常便利,具有兼容性高、開源算法完備的特點[8-10],是目前主流的機器人開發平臺之一。
本文在研究機械臂軌跡規劃問題中充分應用機器人軟件開發平臺的便利特性和開源成果,并在此基礎上通過二次開發,改進了控制算法,對實現機械臂的平穩控制具有重要意義。
1 機械臂軌跡規劃研究
1.1 機械臂控制系統
圖1所示為基于ROS為機械臂搭建的運動控制系統框圖。上位機的操作系統運行ROS軟件開發平臺,主要實現機器人運動學解算、位置插補以及軌跡規劃等工作。驅動接口將ROS輸出的數據通過CAN總線發送給驅動器,由驅動器驅動電機轉動完成機械臂的運動。機械臂上的傳感器將采集的位置、速度等信息實時反饋給上位機,通過閉環控制,實現對機械臂的精度控制。

圖1 機器人運動控制系統框圖Fig.1 The principle diagram of robot control system
1.2 ROS實現機械臂軌跡規劃及其存在的問題
機械臂包含兩種類型的運動方式[11]。一是點對點的運動:只考慮機械臂在笛卡爾空間從起始位姿移動到目標位姿,不考慮運動過程中的位姿;二是軌跡運動:需要精確規劃機械臂所走的路徑。例如機械臂末端沿一條直線移動需要其姿態在移動過程中保持不變,而位置在笛卡爾空間中是一條直線。機械臂軌跡運動下的位姿顯然是關于時間的函數。
無論讓機械臂以何種方式運動,開發者都需要得到在關節空間中解算的一系列關節角度插值。要完成這一任務不僅要用到機器人逆運動學解,還要考慮機械臂在運動過程中的碰撞檢測、軌跡規劃中的運動約束(比如始終保持末端執行器的姿態不變)以及機械臂運動平穩性等問題。
MoveIt是ROS一個重量級的應用模塊[12],它包含了機械臂運動控制的核心功能。
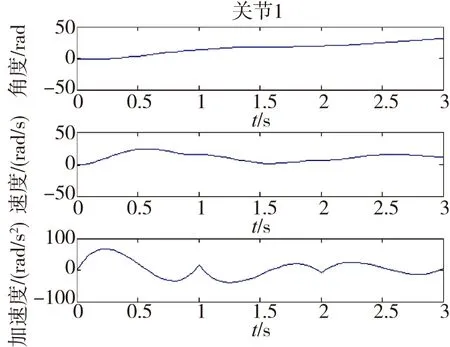
本文所研究的機械表模型是一條7自由度的串聯機械臂。應用MoveIt模塊可以快速完成三方面的工作:機械臂建模、運動學解算和路徑規劃。MoveIt在運動學解算以及路徑規劃過程中,會將各種運動約束的因素也考慮進來。例如防碰撞檢測、設定關節最大運動角度和角速度等。但是MoveIt在仿真環境下輸出的軌跡規劃數據只包含7個關節的角度插值數據,沒有角速度插值,并且輸出周期為500ms。驅動器根據此數據會驅動電機在該周期內以指定恒速到達指定位置,這樣會導致位置與時間的不同步,末端精度出現較大誤差。圖2所示為機械臂跟蹤X-Y平面內一條直線情況下關節空間內4號關節角度插值輸出圖。圖3所示為機械臂跟蹤X-Y平面內一條直線情況下笛卡爾空間內機械臂末端運動軌跡圖。
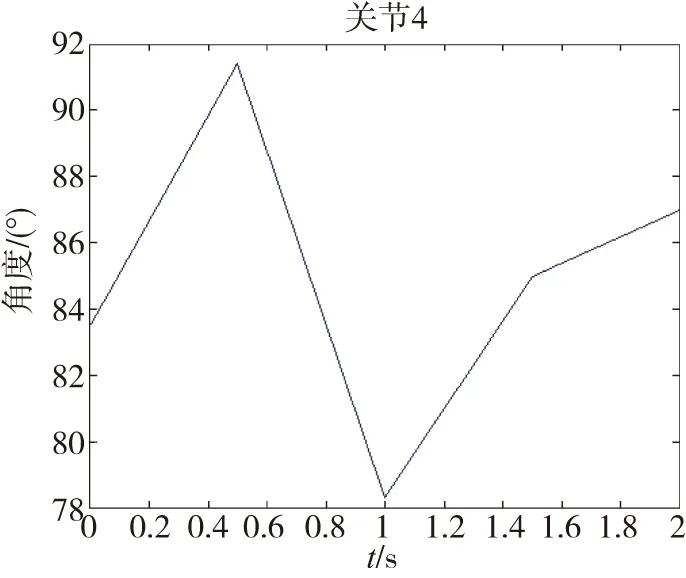
圖2 關節4角度插值Fig.2 The angle interpolation of joint 4

圖3 跟蹤直線末端軌跡Fig.3 The path of tracking straight
由圖2和圖3可以看出,由于MoveIt輸出的關節角度插值精度低,并且沒有速度插值數據(驅動器采用的是默認的初始關節速度),導致機械臂末端跟蹤誤差大。為了解決這一問題,我們需要在規劃輸出數據和驅動器之間加入一個處理環。該處理環的作用是以更小的控制周期進行數學插值,減小機械臂末端跟蹤誤差,同時也可以降低電機的加速度,防止在運行過程中由于頻繁大幅的加減速而導致的機械臂抖動問題,如圖4所示。

圖4 軌跡規劃輸出示意圖Fig.4 The output of the trajectory planning
1.3 改進的控制算法
1.3.1 控制流程
在MoveIt輸出的軌跡角度插值的基礎上,本文設計了五次多項式插值算法將其角度插值更加細分,并可以得到連續的角速度插值。該方法可以將仿真得到的數據直接輸出給驅動器使用。完整的運動控制流程圖如圖5所示。

圖5 運動控制流程圖Fig.5 The flow diagram of motion control
1.3.2 插值算法
設想這樣的場景:MoveIt軌跡規劃庫函數計算輸出離散的關節角度插值,每一個插值點都可以看做是一個路徑點;每個機械臂關節依次通過所有路徑點,映射成不同關節關于時間的一段段連續的光滑曲線。不同關節的時間函數曲線是相互獨立的,但運動周期與總的運動時間是相同的。
機械臂平穩的運動需要保證其關節角速度是連續可導的,并且角加速度是連續的。因此,可以構造五次多項式插值函數來模擬上述情景中的每段連續的時間函數。求解五次多項式方程組需要6個已知條件:分別為不同關節的每段時間函數的起始點ti(其中,i∈(1,N),N是MoveIt輸出的關節插值數目)時刻和目標點ti+1時刻的角度、速度和加速度。
任意ti+1時刻的角度θti+1就是MoveIt輸出的路徑點;ti+1時刻的瞬時角速度由相鄰路徑點角度差除以運動周期代替(其中,Δt為控制周期)
(1)
ti+1時刻的瞬時角加速度由相鄰中間點角速度差除以運動周期代替
(2)
以此便可以根據已知的起始點和目標點的6個條件求解五次多項式方程組系數。通過五次多項式插值進一步細分關節角度和角速度插值并將其發送給驅動器。
θt=C1t5+C2t4+C3t3+C4t2+C5t+C6
(3)
(4)
(5)

(6)
(7)
(8)
(9)
(10)
(11)
根據克萊姆法則,解得系數通式如下所示:
(12)
(13)
(14)

(15)

(16)

(17)
將此系數通式帶入到原方程式(6)~式(11)中,便可以求得7個關節在每段插值內的時間函數。
1.4 插值算法軟件實現
基于上述算法控制流程圖,便可以編寫軟件來實現機械臂的軌跡運動功能。設定機械臂運動的起始點和目標點,通過計算機解算獲得在關節空間運動的參數;計算機判斷機械臂是否運動到目標點;當機械臂運動到目標點,計算機停止發送運動指令。軟件流程如圖6所示。
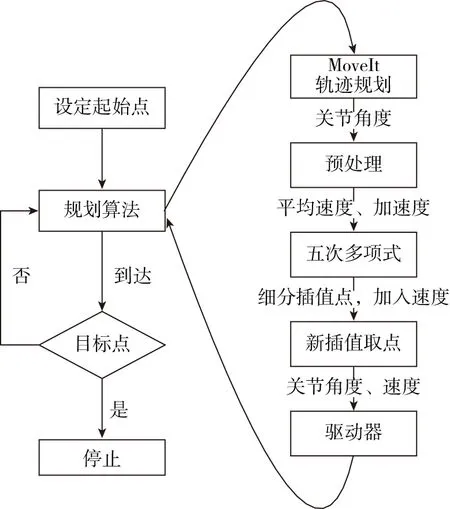
圖6 軟件設計流程圖Fig.6 The flow diagram of software design
2 仿真
通過仿真實驗對五次多項式的插值效果進行研究驗證。機械臂右臂在ROS仿真環境下按照圖7所示圓弧軌跡運動。
利用MoveIt軌跡規劃函數解算出一組7個關節的插值點,如表2所示。
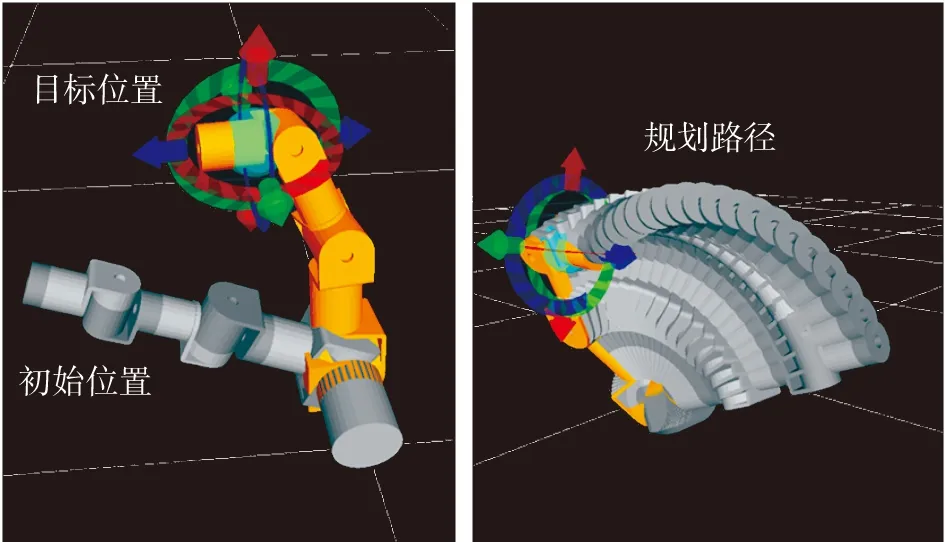
圖7 機械臂運動仿真Fig.7 The robot arm motion simulation
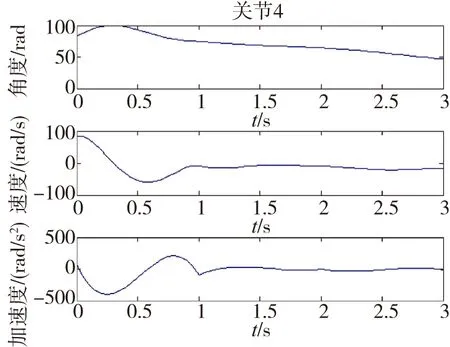
基于表2用五次多項式每50ms完成一次插值運算并使用Matlab繪制曲線。前6個關節角度、角速度、角加速度如圖8所示(關節7在本例中沒有運動,曲線省略)。
機械臂末端在此規劃數值下沿圓弧剖面跟蹤軌跡如圖9所示。
(a)

(b)

(c)
(d)

(e)

(f)

圖9 跟蹤圓弧末端軌跡Fig.9 The path of tracking circle
從圖8中可以看出,多項式插補后的角度、角速度和角加速度曲線都是連續、可導的,這樣會減小運動過程中由于機械臂電機起停等因素導致的沖擊,延長電機壽命,增強機械臂在運動過程中的平穩性。
在添加了新的插值算法之后,從圖9可以看出,機械臂的跟蹤圓弧與理論圓弧的距離誤差最大不超過0.1mm,并且運動過程中不會產出累積誤差而導致機械臂無法到達指定目標點。對運動仿真模擬的結果驗證了五次多項式插值算法,保證了機械臂軌跡運動的高精度。
3 結論
本文基于ROS平臺進行機械臂軌跡規劃的二次開發,通過對軌跡跟蹤算法的完善,將插補速度加入,保證了機械臂軌跡規劃的跟蹤精度,提高了機械臂運動的平穩性,并且通過仿真實驗驗證了該算法對于機械臂軌跡跟蹤優化的有效性,后續將在機械臂平臺進行相應的實際實驗驗證。同時,本文所做的研究表明基于ROS軟件開發平臺為機械臂快速搭建控制系統的方法提高了開發效率,減小了開發難度,為機械臂開發人員提供了一套可供參考的方案。
[1] Wen-Fu X U, Wang X Q, Xue Q, et al. Study on trajectory planning of dual-arm space robot keeping the base stabilized [J].Acta Automatica Sinica, 2013, 39(1):69-80.
[2] Tang X, Shao Z. Trajectory generation and tracking control of a multi-level hybrid support manipulator in FAST [J].Mechatronics, 2013, 23(8):1113-1122.
[3] 鄭利紅, 榮國宏, 李元宗. 基于改進的Khatib方法的冗余機器人手避障軌跡規劃[J].太原理工大學學報, 2015, 32(1):29-32.
[4] 劉華山. 旋轉關節串聯機器人多軸運動控制技術研究[D].杭州:浙江大學, 2010.
[5] 秦鋒, 徐向榮. 基于樣條函數法的機器人運動軌跡規劃[J].機械科學與技術, 1996,15(4):561-565.
[6] Metta G, Sandini G, Vernon D, et al. The iCub humanoid robot: an open platform for research in embodied cognition[C]// Proceedings of the 8thWorkshop on Performance Metrics for Intelligent Systems. ACM, 2008:50-56.
[7] Ha I, Tamura Y, Asama H. Development of open platform humanoid robot DARwIn-OP [J].Advanced Robotics, 2013, 27(3):617-628.
[8] 曹正萬, 平雪良, 陳盛龍,等. 基于ROS的機器人模型構建方法研究[J].組合機床與自動化加工技術, 2015(8):51-54.
[9] Hart S, Dinh P, Hambuchen K. The affordance template ROS package for robot task programming[C]// 2015 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2015:6227-6234.
[10] Tsarouchi P, Makris S, Michalos G, et al. ROS based coordination of human robot cooperative assembly tasks-an industrial case study[J].Procedia CIRP, 2015, 37:254-259.
[11] 馬江. 六自由度機械臂控制系統設計與運動學仿真[D].北京:北京工業大學, 2009.
[12] Coleman D, Sucan I, Chitta S, et al. Reducing the barrier to entry of complex robotic software: a moveit! case study[J].Eprint Arxiv, 2014.
[13] Okada Kei. ROS(Robot Operating System)[J].Journal of the Robotics Society of Japan, 2012, 30(9):830-835.
[14] 蔡自興,徐光祐. 人工智能機器應用 [M].北京:清華大學出版社,2010.
[15] 張建偉,張立偉,胡穎,等.開源機器人操作系統—ROS [M].北京:科學出版社,2012.
中國航天科工集團公司科技期刊聯合征訂啟事
《Journal of Systems Engineering and Electronics》是由中國航天科工集團公司主管,中國航天科工防御技術研究院、中國宇航學會、中國系統工程學會聯合主辦,北京航天情報與信息研究所承辦的英文學術期刊,創刊于1990年,雙月刊。主要欄目為:電子技術,防御電子技術,系統工程,軍用系統分析,控制理論與實踐,軟件、算法與仿真,可靠性等。本刊被美國科學引文索引(SCI)、美國工程索引(EI)、美國劍橋科學文摘(CSA)、英國科學文摘(INSPEC)、荷蘭SCOPUS、美國IEEE Xplore、中國知網、萬方數據以及《中國學術期刊文摘》《中國無線電電子學文摘》《電子科學文摘》等國內外多種權威檢索機構或數據庫收錄,獲中國國際影響力優秀學術期刊等多項榮譽。本刊與美國電氣和電子工程師學會(IEEE)簽約,成為國內首批與IEEE建立合作關系的期刊。國際標準連續出版物號:ISSN 1004-4132;國內統一刊號:CN 11-3018/N。期定價:90元,年定價:540元;郵發代號:82-270。可通過本刊編輯部聯系訂閱(通信地址:北京142信箱32分箱,郵編:100854,發行電話:010-68386015),也可通過郵局訂閱。E-mail:jseeoffice@126.com,網址:http://www.jseepub.com。
《系統工程與電子技術》是由中國航天科工集團公司主管,中國航天科工防御技術研究院、中國宇航學會、中國系統工程學會聯合主辦,北京航天情報與信息研究所承辦的中文學術期刊,創刊于1979年,月刊。主要欄目為:電子技術,傳感器與信號處理,系統工程,制導、導航與控制,通信與網絡,軟件、算法與仿真,可靠性等。本刊為中國科學引文數據庫核心期刊、中國科技論文統計源期刊,被美國工程索引(EI)、英國科學文摘(INSPEC)、日本科學技術振興機構數據庫(JST)、中國核心期刊(遴選)數據庫以及《中文核心期刊要目總覽》《中國學術期刊文摘》《中國無線電電子學文摘》《電子科學文摘》等國內外多種權威檢索機構或數據庫收錄,曾獲中國期刊方陣“雙百期刊”、國家期刊獎百種重點期刊、中國精品科技期刊、中國國際影響力優秀學術期刊等多項榮譽。國際標準連續出版物號:ISSN 1001-506X;國內統一刊號:CN 11-2422/TN。期定價:40元,年定價:480元;郵發代號:82-269。可通過本刊編輯部聯系訂閱(通信地址:北京142信箱32分箱,郵編:100854,發行電話:010-68386015),也可通過郵局訂閱。E-mail:xtgcydzjs@163.com,網址:http://www.sys-ele.com。
《戰術導彈技術》 由中國航天科工集團公司主管、中國航天科工飛航技術研究院主辦、航天導彈總體專業情報網協辦,2014年入選中文核心期刊,被北大出版的《中文核心期刊要目總覽》收錄。本刊是為導彈的研究、設計、制造、試驗、使用服務的綜合性學術技術類刊物。主要刊登導彈和導彈武器系統總體技術,任務規劃技術,制導、導航與控制技術,推進技術,計算機在導彈武器系統及其分系統中的應用技術等方面的學術技術論文。本刊入選俄羅斯《文摘雜志》(AJ)、《中國導彈與航天文摘(CAMA)》和《中國航空文摘》,為《中國學術期刊綜合評價數據庫》來源期刊,由《中國學術期刊(光盤版)》和“中國期刊網”全文收錄;曾榮獲航天科技期刊優秀獎。本刊1980年創刊,雙月刊,國內外公開發行,大16開本,期定價20元,全年定價120元。中國標準刊號為ISSN1009-1300/CN11-1771/TJ。訂閱本刊請與天津市大寺泉集北里別墅17號(300385)“聯合征訂服務部”聯系,可上網www.LHZD.com索要訂單;也可與北京7254信箱4分箱(100074)《戰術導彈技術》編輯部聯系訂購,電話: 010-68375662,68375084(發行)。E-mail:zhanshu310@126.com;網址:http://www.haiying.org.cn。歡迎登錄期刊網站在線投稿。
《飛航導彈》由中國航天科工集團公司主管、北京海鷹科技情報研究所主辦,1992、1996、2004、2008、2011、2014年連續被北大圖書館出版的《中文核心期刊要目總覽》收錄,2012、2013、2014、2015年連續入選中國科技核心期刊。《飛航導彈》是航天導彈總體專業情報網網刊,為《中國學術期刊綜合評價數據庫》來源期刊,被《中國核心期刊(遴選)數據庫》、《中國學術期刊(光盤版)》和《中國期刊網》全文收錄。《飛航導彈》主要報道國外飛航武器系統總體技術、制導與控制技術、推進技術,包括飛航導彈、無人機、高超聲速技術、臨近空間飛行器的研制、試驗、生產、裝備、作戰、改型以及相關的新技術、新材料和新工藝。本刊1971年創刊,月刊,是中文核心期刊和中國科技核心期刊,國內外公開發行,大16開本,期定價20元,年定價240元,全年合訂本定價300元;中國標準刊號為ISSN1009-1319/CN11-1770/TJ。訂閱本刊請與天津市大寺泉集北里別墅17號(300385)“聯合征訂服務部”聯系,可上網www.LHZD.com索要訂單;也可與北京7254信箱4分箱(100074)《飛航導彈》編輯部聯系訂購,電話: 010-68376009,68375084(發行部)。E-mail:310feihang@sina.com;網址:http://www.haiying.org.cn。歡迎登錄期刊網站在線投稿。
《推進技術》是由中國航天科工集團公司主管、中國航天科工集團三十一研究所主辦的全國優秀科技期刊,是國務院學位委員會和教育部研究生辦聯合指定的重要期刊。1980年創刊,月刊,內容涉及航空、航天和航海推進領域。主要刊登各類飛機、無人機、導彈、運載器和航天器的推進系統在理論研究、設計、實驗等方面的學術論文。主要欄目有:學術前沿,氣動熱力學與總體,葉輪機械,燃燒與傳熱,結構、強度與振動,控制、測量與故障診斷,先進材料、推進劑與燃料,其它推進理論與應用。曾4次榮獲航天科技期刊一等獎,兩次榮獲全國科技期刊評比二等獎,并榮獲第二屆國家期刊獎銀獎,2002年~2005年,連續4次被評選為“百種中國杰出學術期刊”。2008年榮獲“中國精品科技期刊”稱號。2015年榮獲由國家新聞出版廣電總局組織評選的“百強報刊”稱號。本刊被美國《工程索引》Ei的核心檢索Ei Compendex數據庫、美國《化學文摘》(CA)、美國《劍橋科學文摘》(CSA)、美國《國際宇航文摘》(IAA)、荷蘭《文摘與引文數據庫》Scopus、《中國核心期刊(遴選)數據庫》、《中國期刊全文數據庫》(CJFD)、《中國科技期刊數據庫》等收錄,是中國科技論文統計源期刊、中文核心期刊和中國學術期刊綜合評價數據庫 (CAJCED)統計刊源。2014年成功注冊DOI編碼。國際標準連續出版物號為ISSN1001-4055, 國內統一刊號為CN11-1813/V。國內外公開發行,大16開本,每期200頁,每期定價50元。廣告經營許可證號:京豐工商廣字第8014號。郵發代號:80-937。歡迎訂閱。聯系電話:010-68191522,010-68376141;網址:http://www.tjjs.casic.cn/;通信地址:北京7208信箱26分箱(100074);E-mail:tjjs@sina.com。
《現代防御技術》(雙月刊)是由中國航天科工集團公司主管,北京電子工程總體研究所主辦的學術技術性刊物,中國宇航學會無人飛行器分會會刊。1973年創刊,雙月刊,國內外公開發行。2004年起連續入編《中文核心期刊要目總覽》,2008年起連續被收錄為“中國科技核心期刊”(中國科技論文統計源期刊), 2009年被評為“RCCSE中國核心學術期刊”,2014年成為國家新聞出版廣電總局第一批通過認證的科技學術期刊。主要刊登國內外防御技術,包括空天防御體系、戰略戰術、防空導彈武器系統總體、精確制導技術等方面的科技論文。主要欄目有:空天防御體系與武器,導彈技術,導航、制導與控制,指揮控制與通信,探測跟蹤技術,軍事電子信息系統,綜合保障性技術,測試、發控技術,仿真技術等。本刊被多種文獻數據庫收錄:如俄羅斯“文摘雜志”,清華知網,《萬方數據——數字化期刊群》和《中國核心期刊(遴選)數據庫》等。國內統一刊號為CN11-3019/TJ,國際標準刊號為ISSN 1009-086X,大16開本,逢雙月末出版。2017年,每期約170頁,單價20元,年定價120元。郵發代號2-443。通信地址:北京142信箱30分箱《現代防御技術》編輯部(100854)。電話:010-68388557,E-mail:xdfj@263.net,網址:www.xdfyjs.cn,作者請在網站http://www.xdfyjs.cn上在線注冊投稿。
《計算機測量與控制》是由中國計算機自動測量與控制技術協會主辦、中國航天科工集團公司主管的向國內、外公開發行的科技期刊。辦刊宗旨是報道前沿技術、引領測控技術發展方向,突出前瞻性、導向性和實用性。是從事研究、設計、開發和應用計算機測試和控制技術的科研人員喜愛的科技刊物。本刊為中文核心期刊、中國科技核心期刊,國家百種重點期刊、被俄羅斯《文摘雜志》、英國《科學文摘》、美國《劍橋科學文摘》等著名的國外檢索機構收錄。刊出的論文體現了技術上的先進性、方法上的新穎性、工程上的實用性、設計上的導向性、內容豐富、信息量大、涵蓋面廣、適用面寬。欄目設有:專家論壇、綜述與評論、自動化測試、控制技術、試驗與驗證技術、軍事測控技術、設計與應用、軟件工程技術、數采與處理等。本刊為月刊,大16開本,每期300多頁,期定價30元,全年定價360元,在各地郵局訂閱。錯過訂閱時間可隨時向雜志社訂閱。郵發代號:82-16。帳戶:《計算機測量與控制》雜志社,帳號:11001085400059612076,開戶行:建行北京阜成路支行,地址:北京海淀區阜成路甲8號航天科工大廈4層 《計算機測量與控制》雜志社收(100048)。電話: 010-68767886,68371556-12~18/23;傳真:010-68372068,E-mail: ck@chinamca.com。
《計算機工程與設計》由中國航天科工集團主管,中國航天科工集團七O六所主辦。報道計算機科學技術領域最新科研成果,刊載內容覆蓋計算機領域各個學科,主要欄目:信息安全技術、網絡與通信技術、嵌入式系統工程、軟件與算法、多媒體技術、仿真技術、智能技術、抗惡劣環境技術、體系結構與外圍設備、開發與應用等。該刊是中國計算機學會會刊,中國宇航學會會刊,入選北大中文核心期刊,中國科技核心期刊;被英國SA/INSPEC、俄羅斯AJ of VINITI、美國UPD、波蘭IC、中國知網CNKI、中國學術期刊綜合評價數據庫等國內外著名檢索機構收錄;被中國學術期刊文摘、電子科技文摘收錄。1980年創刊,月刊,定價38元/冊。刊號:ISSN 1000-7024,CN 11-1775/TP。在郵局訂閱,郵發代號82-425。通信地址:北京142信箱37分箱,郵編:100039。聯系電話:010-68389884,010-88528214。投稿網址:www.china-ced.com,E-mail:ced@china-ced.com。歡迎踴躍投稿和訂閱。
《計算機仿真》是由中國航天科工集團主管,北京控制與電子技術研究所主辦,計算機仿真雜志社編輯出版發行的中國計算機用戶協會會刊。旨在促進我國仿真技術交流和發展,既總結過去、探索基礎理論,又跟蹤發展前沿,重點報導仿真應用成果。內容包括仿真對象建模、仿真算法研究、仿真軟件開發、仿真系統的設計與實現、仿真培訓系統的研制、連續系統仿真、離散系統仿真、復雜系統仿真、統計仿真、優化仿真、定性仿真、智能仿真、虛擬仿真、分布交互式仿真、建模與仿真的VV&A、基于仿真的設計研究和采辦,以及信息網絡技術仿真等20個欄目。現已是北大中文核心期刊、中國科技論文核心期刊,于2003年被《中國科學文獻計量評價研究中心》評為優秀期刊,同時被選入中國學術期刊(光盤版)文獻檢索系統、中國科學引文數據庫等。本刊創刊于1984年,月刊,大16開本,國內外公開發行,可刊登廣告。國內郵發代號為 82-773,全年定價360元(每期單價30元)。歡迎訂閱。E-mail:jsjfz@vip.163.com; 投稿網址:www.jsjfz.com。
《系統仿真學報》是中國仿真學會會刊,1989年7月創刊,月刊;中國航天科工集團公司主管,北京仿真中心、中國仿真學會聯合主辦;本刊是全國中文核心期刊,影響因子、引文頻次及下載量居同領域期刊前列,是中國仿真科學技術領域具有權威性、代表性的學術期刊,其宗旨是報道我國仿真科學與技術領域中具有國際、國內領先水平的科研成果,刊登具有創新性學術見解的研究論文,被國際文獻檢索數據庫(Scopus)、美國Ulrch’s Periodicals Directory、英國科學文摘數據庫(SA/INSPEC)、日本科學技術社數據庫JST、中國科技期刊核心刊、中國科學引文數據庫核心源、北大“中文期刊核心要目總覽”、清華“中國學術期刊核心刊”、中國科協“中國學術期刊文摘”等收錄;連續兩次榮獲“2013中國最具國際影響力學術期刊”“2014中國最具國際影響力學術期刊”稱號;本刊為大16開,每期260頁左右;定價50元,全年總價600元;郵發代號82-9,國內刊號CN11-3092/V,國際刊號ISSN1004-731X;通信地址:北京市142信箱13分箱系統仿真學報編輯部, 郵編100854;電話 010-88527147 / 010-68388709;http:∥www.china-simulation.com;E-mail: simu-xb@vip.sina.com。
《導航定位與授時》 由中國航天科工集團公司主管,北京自動化控制設備研究所、中國宇航出版有限責任公司主辦的學術型雙月刊。主要刊登導航與控制、定位與授時、儀表與部件、仿真與測試等方面的學術技術論文。本刊是中國宇航學會無人飛行器分會會刊、中國航天第四專業信息網網刊,由萬方數據和中國知識資源總庫全文收錄。本刊2014年創刊,雙月刊,國內公開發行,大16開本,每期108頁左右,期定價20元,全年定價120元。中國標準刊號為ISSN2095-8110/CN10-1226/V。訂閱請與天津市大寺泉集北里別墅17號(300385)“聯合征訂服務部”聯系,電話: 022-23973378, 022-23962479;也可與北京7209信箱10分箱(100074)《導航定位與授時》編輯部聯系訂購,電話:010-88532644,68377087。E-mail:pnt333@126.com;網址:http://dhdwyss.zghtqk.com/ch/index.aspx。歡迎登錄期刊網站在線投稿。
《航天電子對抗》由中國航天科工集團8511研究所主辦,是中國宇航學會電磁信息專業委員會會刊,國內外公開發行。報道內容涉及與空間系統、導彈武器系統相關的雷達、制導與引信、通訊、導航、C4I等電子設備和系統的電子/光電攻防對抗技術等。主要報道電子/光電攻防對抗的最新技術、科研成果、工程設計和應用、性能檢測與評估、模擬試驗等論文與信息。本刊為《中國學術期刊(光盤版)》、《中國期刊網》的全文收錄用刊,是“中國學術期刊綜合評價數據庫來源期刊”,并被多種文獻數據庫收錄。1985年創刊,雙月刊,大16開本,64頁,期定價10元,年定價60元,中國標準刊號為ISSN1673-2421/CN32-1329/TN。訂閱請與天津市大寺泉集北里別墅17號(300385)“聯合征訂服務部”聯系,電話:022-23973378,022-23962479;也可與南京市1610信箱(210007)編輯部聯系,電話:025-84638543;E-mail:htdz8511@126.com;傳真:025-84498353。
《紅外與激光工程》由中國航天科工集團公司主管,天津津航技術物理研究所主辦,創刊于1972年,是國家新聞出版署批準的國內外公開發行的學術刊物。中國科技論文統計源期刊,中文核心期刊。被美國“工程索引(EI)compendex”,英國“科學文摘(SA)”,美國“劍橋科學文摘(CSA)”,俄羅斯“文摘雜志(AJ)”,日本“科學技術社數據庫(JST)”,荷蘭“斯高帕斯(Scopus)數據庫”等收錄。本刊是中國航天界光電子技術領域內學術性與工程應用性集于一體的綜合性刊物,主要刊登國內紅外與激光技術方面的學術論文和工程研究報告,集中反映中國光電技術的工程應用水平。期刊常設專欄包括紅外技術及應用、激光與光電子技術應用、光學遙感與空間探測、光通信與光傳感、光電測量、太赫茲、光譜成像等。本刊為大16開本,336頁,月刊,期定價45元,年定價540元。國內刊號CN 12-1261/TN,國際刊號ISSN 1007-2276,郵發代號6-133。通信地址:天津市空港經濟區中環西路58號(300308);聯系電話:022-58168883,58168884,58168885;QQ群:275667167,164892997;微信號:irla83589;E-mail:irla8358@163.com;網址:http://www.irla.cn。歡迎登錄期刊網站在線投稿。
《湖北航天科技》是中國航天科工集團所屬中國三江航天集團和湖北省宇航學會聯合創辦的省級綜合性雙月刊。本刊宗旨是為國防現代化建設服務,為導彈武器系統的研制與生產服務,為軍品研制、民品開發提供科技情報,廣泛傳播國內外航天科技知識與信息,交流科技成果,活躍學術氣氛,啟迪廣大科技工作者的思路,為我國的現代化建設作出應有的貢獻。本刊登載的主要內容有國內外戰術導彈武器系統研制、生產、質量管理等方面的論文;推進與燃料、導航與制導、戰斗部與引信、結構與強度、地面設備與發射裝置等方面的研究報告;世界航天高技術發展動向與趨勢;航天工業新技術、新工藝、新材料和新產品介紹;軍工技術轉民用以及各國導彈武器系統研制、生產、軍貿動態等。《湖北航天科技》登記號為鄂內資準印證第2063/ZY號。1985年創刊,季刊,16開本,49頁,逢季末20日出刊。投稿及通訊地址:武漢東西湖區金山大道9號《湖北航天科技》編輯部(430040)。電話:027-59392283;郵箱:hbhtkj@sohu.com。
《江南航天科技》由中國航天科工集團所屬中國江南航天工業集團公司主辦,1975年創刊,季刊,系內部刊物。貴州內部報刊準印證號:第07-KO78號。投稿與交換刊物,請與貴州省遵義市北京路36號(563003)聯系,電話: 0851-8696064。
Research on Trajectory Planning of ROS-based Robot Arm
LIU Ru-jia, WANG Fang, ZHANG Qiang, LI Nan
(Aerospace Science & Industry Intelligence Robot Co. Ltd., Beijing 100074, China)
In case of the technical difficulties of the development in manipulator trajectory planning, a solution that builds a robotic arm control system based on an open source software platform (Robot Operating System, ROS) is put forward here. On this basis, an algorithm based on quintic polynomial interpolation is presented to cover the shortage of ROS algorithm on trajectory planning functions, and the simulation results show that the new algorithms can improve the control function of manipulator arm. And the method provides a reference to engineering manipulator arm trajectory planning.
Robot; Manipulator arm; ROS; Motion control; Trajectory planning
10.19306/j.cnki.2095-8110.2016.06.016
2015-10-28;
2016-01-10。
劉汝佳(1990 - ),男,碩士,主要從事機器人運動控制與軟件設計方面的研究。E-mail:sansherlock@126.com
TP242.6
A
2095-8110(2016)06-0082-07
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
