星間頻差測量方法及地面驗證
2016-03-16 08:04:26王崇羽陸波袁媛
航天標準化 2016年1期
關鍵詞:測量
王崇羽 陸波 袁媛
(航天東方紅衛星有限公司,北京,10094)
星間頻差測量方法及地面驗證
王崇羽 陸波 袁媛
(航天東方紅衛星有限公司,北京,10094)
文摘:介紹編隊飛行的小衛星星間頻差的產生機理,分析星上時差測量的方法和誤差,提出一種簡便易行的星間頻差地面測量系統,闡明系統的硬件組成和軟件設計,以便于小衛星星座整星測試中星間頻差的驗證。
衛星定位;星間頻差;頻差測量;測試驗證。
近年來,隨著小衛星技術的快速發展,出現了一種多顆小衛星的編隊形式,它利用衛星間的相互協作,具有了大衛星的功能。這種多顆小衛星的編隊形式具有成本低、開發周期短等優點。小衛星編隊飛行中,為了實現衛星間的協同工作,需要對衛星之間的狀態信息進行觀測。星間相對距離的測量是衛星之間的一個重要觀測量,獲取衛星之間的距離,以便實現距離信息的交換,并對衛星進行精確定位。
在星間測距技術實現中,為了達到高精度的測量結果,通常需要星座采用統一的時間頻率系統。星間頻差是編隊衛星統一時間頻率系統的一個重要參數,在整星測試中驗證星間頻差的正確性至關重要。高精度時間頻率系統為星座中的各個衛星提供統一的時間基準,以滿足衛星載荷的各項任務需求。
時間同步就是把各衛星時間對齊,使各衛星在同一時刻具有相同的時間計量值。在高精度應用領域現在都是采用原子時來計時。雖然原子頻標的準確度和穩定度相對較高,但時間累積誤差對于高精度時間同步來說仍然是需要考慮的。高精度時間同步除了需要時間同步以外,也需要頻率同步。因此,星間時鐘頻差的測量,以及在整星測試中星間頻差的驗證具有重要的意義。通過
星間時鐘頻差的測量和驗證,可以對星上頻差測量結果進行準確評估,這是型號任務成功的基礎條件。
1 星間頻差的形成
某小衛星星座的星上時間系統主要分為星務時間、高精度時間。其中,星務時間與以往衛星的星時概念相同,為程控指令提供時間參考。高精度時間為本型號特有,由時間管理單元提供,主要用于:供給應答機做星地頻差測量;供給GPS和星間鏈路做差分運算,計算星間頻差;供給載荷,供其使用。
1.1 星上時間生成
小衛星星座的系統時鐘是由衛星上的原子鐘統計處理形成的,它是一種系統意義上的虛擬時鐘。銣鐘為星上的時間管理單元提供10MHz的頻率基準,而時間管理單元作為高精度時間的提供者,以銣鐘輸出的10MHz基準時鐘為計時單位標準生成秒脈沖(1PPS),連同分頻產生的10MHz和濾波計算出的高精度時間一起輸出,供星上其他設備對時,形成星上時間。星上時間以脈沖數累計,其最小單位為100ns。輸出秒脈沖表示整秒時刻,秒計數值通過CAN總線廣播到星上其他各分系統。
1.2 星間頻差的產生
星載銣鐘作為小衛星時鐘基準的提供者,其頻標的振蕩周期不可能保持恒久不變,它會發生系統變化和隨機變化。我們將主星與副星之間的時鐘頻率差定義為星間頻差,頻差方程為Δf=fafb,銣鐘的技術指標主要由3個因素所制約——頻率準確度、頻率漂移率和頻率穩定度。
a)頻率準確度,頻率準確度表示實際振蕩頻率偏離標稱值的程度,它同時也反映了實際振蕩周期偏離標稱振蕩周期的程度。頻率準確度A可由式(1)表示:

式(1)中:fx為振蕩器的實際頻率值,f0為標稱頻率值,單位均為Hz。
b)頻率漂移率。大多數頻標經過足夠長時間的預熱之后,振蕩頻率將隨時間作單方向漂移,頻率準確度也隨之發生變優。振蕩頻率的這種單方向漂移現象往往遵循線性規律,具有系統變化的特征。頻率準確度在單位時間內的變化量稱為頻率漂移率。頻率漂移率通常用每天、每星期、每月或每年的頻率準確度變化量來表示,相應的稱為日漂移率、周漂移率、月漂移率或年漂移率。頻率漂移率是可以比較準確的進行測量的,并且可以利用測量結果對頻率準確度進行修正。
應用最小二乘法處理一組在不同時刻測得的頻率值,可以計算出頻率漂移率。計算頻率漂移率的基本公式如下:
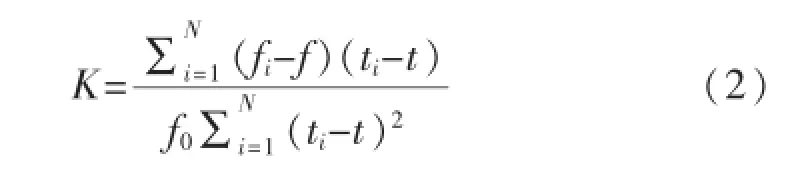
式(2)中:K為頻率漂移率;ti為第i個采樣時刻,單位為月;fi為第i個采樣時刻測得的頻率值,單位為Hz;N為測量數據總數;f為頻率測量值的平均值,單位為Hz;t為測量時刻的平均值,單位為月。
c)頻率穩定度。實驗表明,各種頻標內部普遍含有5種類型的內部噪聲:調相白噪聲、調相閃爍噪聲、調頻白噪聲、調頻閃爍噪聲和頻率隨機游動噪聲。頻標振蕩頻率在這些內部噪聲的影響下會出現隨機起伏,頻率隨機起伏的程度用頻率穩定度來描述。
頻率穩定度有時域穩定度和頻域穩定度之分。通常用阿侖方差來表征時域穩定度,用瞬時相對頻偏的功率密度來表征頻域穩定度。頻域穩定度的大小與采樣時間的長短有關。
編隊飛行的小衛星有各自不同的時鐘基準,必然帶來星間時鐘之間的頻率差,即各小衛星之間的頻差。頻差主要受以上3個指標的影響,因此兩鐘之間的頻差方程可由以上3個指標參數來表示。由于頻率穩定度是與采樣時間有關的,當采樣時間較長時,穩定度對頻差的影響可以忽略不計,見式(3)。星上通常使用相對頻率準確度定義兩星之間的頻率差,即兩星頻率差與主星頻率的比值γ,見式(4)。

式(3)和式(4)中:fb是副星頻率,fa是主星頻率,單位為Hz;k為頻率漂移率;t為測量時刻的平均值,單位為月;A為頻率準確度。
2 星間頻差星上測量
2.1 星上測量方法
衛星采用雙向時間比對的方法對星間時差、頻差進行測量。雙向法的基本原理如圖1所示。
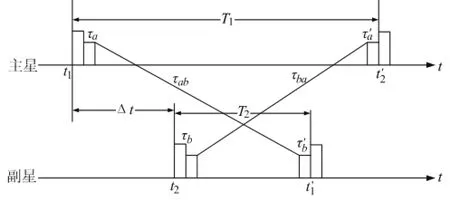
圖1 雙向法的基本原理
主星和副星分別利用各自的設備發送定時信號,并接收來自對方的定時信號。設主星在t1時刻測量的本地鐘定時信號和接收的副星定時信號的頻差為T1,副星在t2時刻測量的本地鐘定時信號和接收的主星定時信號的頻差為T2,主星和副星兩地鐘在t1、t2時刻的瞬時頻差Δt,由圖1可得:

式(5)和式(6)中:τa和τ′a分別為主星發射設備和接收設備的時延;τb和τ′b分別為副星發射設備和接收設備的時延;τab為在t2時刻定時信號由副星發射天線到主星接收天線的傳播時延;τab為在t1時刻定時信號由主星發射天線到副星接收天線的傳播時延。
將式(5)和式(6)對時間t求一階導數,可得:
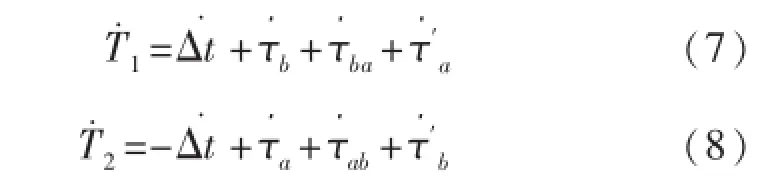
由于設備時延為常數,則τa、τ′a、τb、τ′b的一階導數為零。星間相對速率變化率很小時,主星到副星和副星到主星的傳輸時延基本相等,即
因此,式(7)和式(8)可以簡化為:
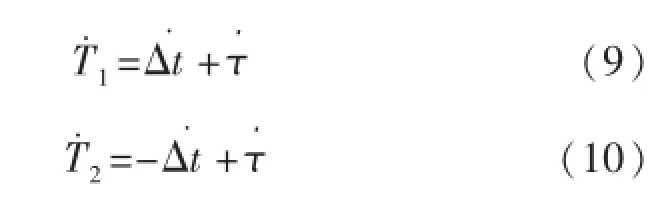
星上通過連續測量計算得到頻率變化的序列值,一方面通過平滑濾波處理,以提高測量精度;另一方面將頻差測量值送給星上其他設備,供其他設備使用。
2.2 星上測量誤差分析
主副星頻差的計算方法是:對測量得到的星間鐘差序列,進行差分和平滑濾波處理,得到星間相對頻差。主副星各有一臺原子鐘A、B,各自產生秒脈沖,如圖2所示。
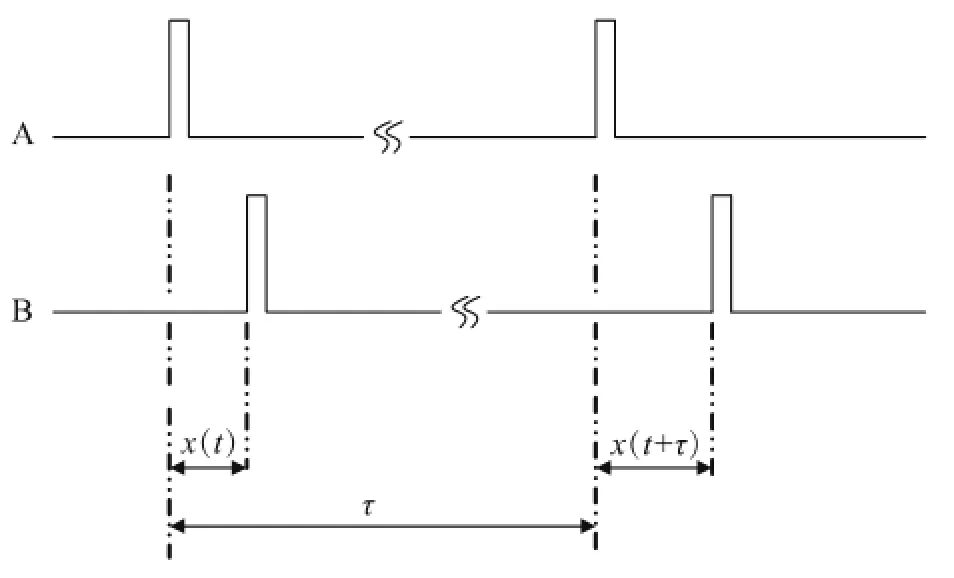
圖2 星間相對頻差解算原理
圖2中,原子鐘A作為基準,在t時刻,原子鐘B相對于A的時間偏差定義為x(t),原子鐘B相對于A的頻差定義為Δf,原子鐘A的頻率為fa。在t時刻,原子鐘B相對于A的相對頻偏為γ=Δf/fa。
假設兩臺鐘的相對漂移率為一常數a,則經過時間τ之后,兩臺鐘相對時間偏差為:式(11)中:σxA(τ)、σxB(τ)是時間偏差的

隨機誤差,與銣鐘的穩定度Allan方差σy(τ)有
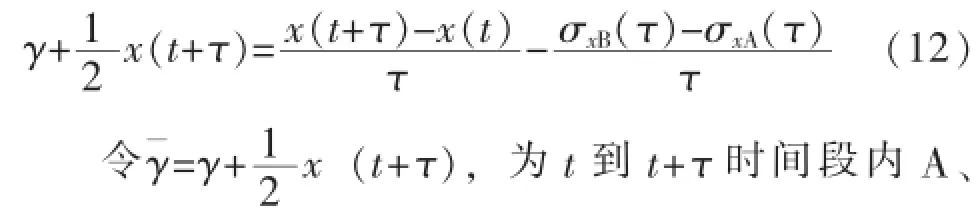
關。對式(11)進行變換:B兩原子鐘相對頻偏的平均值,則:
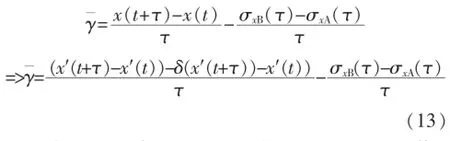
式(13)中:x′(t+τ)為x(t+τ)的測量值;x′(t)為x(t)的測量值;δ(x′(t+τ))-x′(t))為鐘差測量誤差。
由式(13)可知,用測量鐘差值進行差分的方法計算A、B兩原子鐘的相對頻偏,引入的最大誤差δ為:
銣鐘運行一段時間后(一般為3個月),其漂移率將很小,漂移率的變化也非常緩慢,故可以用一段時間內測得的兩臺鐘的相對頻率偏差作為下一個時間段內兩鐘頻率偏差的預估,誤差非常小。運行3個月銣鐘穩定后,漂移率一般在10-13量級,按3×10-13/天計算,1000s內的頻率漂移僅為3.4×10-15,故用1000s內測得的兩鐘相對頻率偏差預估下一個1000s兩鐘的相對頻率偏差,由此帶來的誤差遠小于鐘的隨機誤差和測量誤差。
3 星間頻差地面測量
3.1 地面測量方法及原理
本文所介紹的星間頻差測量驗證環境,是一個地面星間頻差測量系統,應用于地面整星綜合測試階段。它是一種直觀的星間頻差測量方法,是地面衡量星上設備測得頻差的準確度和精確度的手段。
頻差測量從大的方面可以分為模擬測量和數字測量這兩種類型。其中,數字測量的方法一般是采用頻率計,頻率計的優點是:讀數顯示直觀,測量速度快,測量精度和自動化程度高,使用方便,功能多,和計算機的接口很容易,且能夠做到實時處理等,因此這種方法在頻率測量領域使用相當普遍。數字測量可以直接利用通用頻率計的測頻、測周期和測時間間隔功能來進行。
本頻差測量系統正是利用通用頻率計,采用數字測量方法——電子計數法對星間頻差進行測量。具體操作方式是將主星和副星輸出的高精度時鐘信號通過電纜分別引到地面,經過射頻衰減器,轉接至高精度的數字頻率計通道1和通道2,頻率計自主測試出兩路信號的頻率,經過相減計算就能得到星間頻差。
3.2 地面測量方法硬件組成
星間頻差測量驗證環境的總體設計目標是形成一個數字化、綜合化、自動化的頻差測量環境,滿足星間頻差地面測試的需求,而且能夠進行遠程測量與遠程通信。系統基本組成如圖3所示。
整個系統的工作機理是:從主星與副星時間管理單元各引出一路時鐘信號后,經過轉接電纜和衰減器后分別接入頻率計的兩個通道,頻率計在頻差測試軟件的控制下對輸入的兩路時鐘信號進行測量;同時,頻差測量軟件對頻差數據進行實時采集、顯示和存儲。測試軟件安裝于頻差測試計算機中,計算機通過網口經GPIB-LAN轉換器與頻率計GPIB接口連接,從而完成對頻率計的遠程控制和遠程通信。
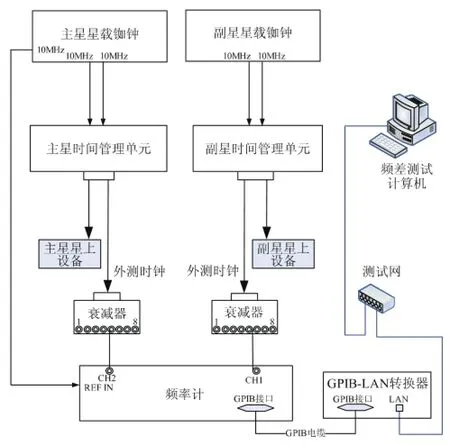
圖3 星間頻差測量環境硬件連接圖
3.3 軟件設計
頻差測試軟件是整個測量驗證環境的核心部分,軟件把頻率計與計算機連接起來,使數據存儲速率及存儲容量和傳統儀器相比較都有非常大的提高。在系統硬件確定的前提下,軟件決定了測量系統功能和性能,軟件總體結構如圖4所示。
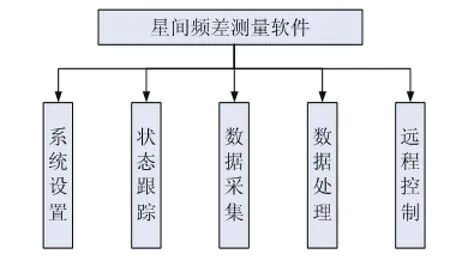
圖4 星間頻差測試軟件總體結構圖
軟件由五大模塊組成:系統設置、狀態跟蹤、數據采集、數據處理和遠程控制。
系統設置模塊——完成軟件的參數設置工作,為測量做好準備;狀態跟蹤模塊——對頻差測試計算機與頻率計的連接狀態進行實時跟蹤監視;數據采集模塊——實現對頻率計的數據采集和顯示;數據處理模塊——完成對頻率計從采集到數據的存儲,最終生成一定格式的測量結果報表;遠程控制模塊——完成對頻率計的遠程設置。
星間頻差測量驗證環境是按照星間頻差產生原理所設計的一種可行性很強的測試系統,測試人員利用測試網中的頻差測試計算機對頻率計進行遠程監控,測試軟件對頻差數據的自動化處理,是一個數字化、綜合化、自化的頻差測量環境。
地面測試的頻差結果經過數據處理,可與星上設備得到頻差測量值進行比對、分析,從而驗證星上設備頻差測量的原理及方法的正確性,滿足星間頻差地面測試的需求。
[1]黃飛江,劉光燦.基于雙向時間同步的星問動態測距算法.長沙大學學報,2011,10:61~64.
[2]黃飛江,盧曉春.基于星間距離變化的動態雙向時間同步算法.武漢大學學報,2010,35(1):13~16.
[3]鐘興旺,陳豪.星座時頻測量技術研究.宇航學報,2010,31(4):1111~1116.
[4]福成,樊昀.雙星時差頻差聯合定位方法及其誤差分析.宇航學報,2008,29(4):1381~1386.
王崇羽(1982年—)男,工程師,從事衛星綜合測試及總體設計工作。
陸波(1977年—)男,工程師,從事衛星測控及星間鏈路設計工作。
袁媛(1979年—)女,高級工程師,從事衛星標準化設計工作。

猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00