斗輪機遠程控制系統在燃煤發電廠的應用
2016-03-21 02:02:32陳永輝吳永朋沈炳華
浙江電力 2016年8期
陳永輝,吳永朋,沈炳華
(1.浙江浙能樂清發電有限責任公司,浙江 溫州 325609;2.杭州集益科技有限公司,杭州 310012)
斗輪機遠程控制系統在燃煤發電廠的應用
陳永輝1,吳永朋1,沈炳華2
(1.浙江浙能樂清發電有限責任公司,浙江 溫州 325609;2.杭州集益科技有限公司,杭州 310012)
介紹了一種斗輪機遠程全自動控制系統在燃煤電廠的應用,該系統結合了GPS定位、激光流量實時檢測、激光三維測控、圖像監控以及安全防范等技術,成功實現了斗輪機遠程全自動控制。實際運行結果表明:通過全自動控制可大大提高斗輪機作業效率,降低工人勞動強度,提高煤場利用率,提高設備運行的安全性,具有顯著經濟效益。
斗輪機;遠程;控制;激光流量檢測;GPS定位
目前燃煤電廠的堆取煤主要由斗輪機司機就地操作,司機工作環境惡劣、勞動強度大、易疲勞,難以避免堆煤時煤垛不規則、取煤時流量波動大等情況,如遇雨霧天氣和夜間作業則影響更大。通過GPS精確定位技術、三維測控技術的應用,結合有效的控制策略,將斗輪機的就地操作改為遠程全自動控制,可以有效避免上述問題,同時可大大提高勞動生產率。浙江省某沿海發電廠已將上述技術成功應用于其煤場3號斗輪機。
1 系統構成
斗輪機遠程全自動控制系統主要由各類檢測裝置、安全防護、通信網絡、實時數據庫、工程師站、操作員站、系統服務器、集中監控平臺、控制系統等環節組成。系統結構如圖1所示。
1.1 檢測系統
在斗輪機的相關位置安裝了定位檢測、煤垛檢測、流量檢測、煤位檢測、行人檢測、堵煤檢測、圖像檢測、出入檢測裝置。其中:
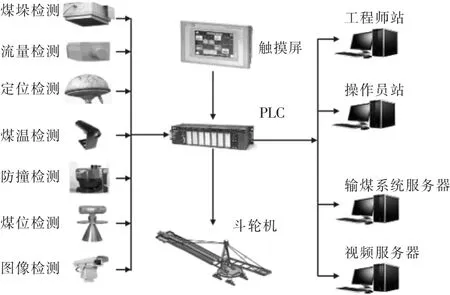
圖1 斗輪機全自動控制系統
定位檢測:在斗輪機上安裝衛星定位裝置,精確地獲取斗輪的空間三維坐標和斗輪機懸臂的俯仰角度和回轉角度數據。
實時流量監測:安裝多套實時激光流量監測系統,采用基于激光掃描的煤流探測技術,實現皮帶實時流量檢測。
行人檢測:大車前后配置多套障礙物檢測裝置,大車移動時檢測到障礙物或行人,即自動停止行走,待障礙物移除后自動繼續行走。
圖像檢測:通過圖像自動跟蹤斗輪機設備運行,便于實時觀察發現異常。
1.2 安全防護系統
安全防護系統主要是行人保護和設備保護,增加了1套斗輪機前進、后退及懸臂回轉、俯仰限位和極限軟保護系統,該軟保護與原有斗輪機自帶的硬保護相互獨立,起到雙重保護作用;大車前后各配置4套障礙物檢測裝置,當大車行走時,若檢測到障礙物或行人,將自動停止,障礙物移除后自動繼續行走;斗輪機懸臂兩側配置了懸臂防撞檢測裝置,在懸臂回轉過程中若檢測到障礙物體,自動停止;在斗輪機頭部安裝了煤垛高溫檢測裝置,取煤過程中若煤溫超限,系統自動報警或停止取煤。
2 控制原理
2.1 系統定位方法
針對斗輪機系統的定位,在國內首次采用了GPS+北斗雙網融合定位技術,提高了系統可靠性。采用RTK衛星定位技術,使定位精度能夠達到±30 mm,定位系統通過自動準確獲取斗輪大車的位置、懸臂的回轉角度和俯仰角度等數據后,可根據作業指令完成自動尋跡工作。
2.2 流量控制原理
斗輪機取煤過程如圖2所示。從圖中可以看出,斗輪機在取煤過程中的流量與斗輪機回轉臂在某一層取煤時形成的2個環形有關,造成不同回轉角下的取煤深度以一定函數關系單調變化(回轉角越大,取煤深度越小),取煤流量不僅與該取煤深度有關,還與取煤層高、回轉臂的回轉速度有關。
取煤流量f是單位時間內的上煤重量;煤密度為ρ;取煤深度V是斗輪挖取下來的煤在沿斗輪運動軌跡法線方向上的深度;取煤層高h是分層取煤時每層設定的高度;回轉速度v是回轉臂末端的線速度,則:


圖2 斗輪機取煤示意
而V又與每次大車步進長度L及懸臂回轉角θ有關,由于控制過程中步長很短,可將步進過程中cosα視為1,則可推導出:

考慮到斗輪機現有的分層取煤工藝,設定恒定流量為f0,對于某一取煤層作業來說,ρ,h,L均固定,要保證取煤流量恒定,則回轉速度v就是θ的函數。在控制時只要根據當前時刻的回轉角度,就可調節回轉速度。理論上通過這種方式輸出一定的速度信號能夠將煤流量控制在f0。
2.3 流量反饋控制原理
在實際過程中由于其他因素的影響,例如取煤密度、深度和層高無法保持恒定,將導致實際過程中煤流量波動較大。因此將實際測量的煤流量作為反饋,通過調整斗輪取煤速度,則可以保證根據需要實時控制取煤流量。
系統采用了基于激光掃描的煤流探測技術,通過動態掃描皮帶運行時煤截面積進行積分,完成流量的實時測量。圖3中所示為流量檢測過程,可以計算初控制系統中的瞬時流量:

式中:k為常數;v為皮帶的運行速度;S為皮帶運行時煤截面積。
將實測流量和流量控制目標作為控制偏差進行PID計算,最終可完成取煤流量的實時控制。需要注意的是,實際控制邏輯中可根據煤垛坍塌、煤垛不規則、煤層厚度不均等特殊工況進行PID控制參數的調整,以保證控制效果。
2.4 堆取煤控制原理
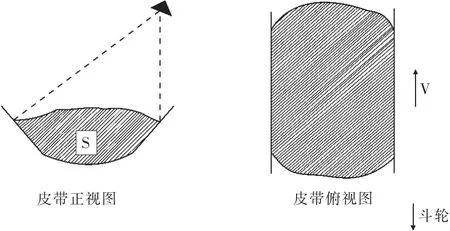
圖3 流量檢測
在自動堆煤模式下,斗輪機自動定位至堆煤起始位置,當堆煤允許指令發出后,煤斗輪機自動啟動懸臂皮帶,開始堆煤,斗輪頭部的煤位檢測裝置檢測到一定值后,懸臂自動上升2°,持續上升直到煤堆達到設定值,斗輪機保持俯仰角度不變,懸臂自動向左回轉一定角度,再繼續堆至設定值,逐步向左回轉,直到該煤堆的左邊界,大車自動后退1個堆煤步長,同時懸臂右轉至堆煤右邊界,開始新的堆煤循環,直至堆煤完成。
在自動取煤模式下,斗輪機自動定位至取煤起始位置,當取煤允許指令發出后,煤斗輪機自動啟動斗輪和懸臂皮帶,從軌道內側向外側回轉取煤。回轉速度控制是基于懸臂回轉角度,同時結合取煤量設定進行閉環PID控制,保證取煤瞬時流量穩定,當回轉至取煤外角后,大車自動前進1個步長(約700 mm),懸臂同時自動向軌道內側回轉,直到取煤內角,然后大車自動前進下1個步長,同時懸臂向外側回轉,依次循環取煤,直至取煤結束。
3 應用效果
3號斗輪機遠程全自動控制系統經過連續運行,系統可靠、穩定,操作人員在煤控室通過上位機對斗輪機進行遠程全自動操控,斗輪機就地實現無人值守。斗輪機自動工作模式有:全自動循跡定位、自動取煤、自動堆煤、自動分流。
斗輪機的遠程全自動控制系統的應用,大大提高了取煤效率,自動取煤時流量波動小,接近額定流量,平均流量比手動取煤高出24%以上。取煤工作每班可縮短約1 h,輸煤系統作業能力和效率明顯提升,節約電耗,經濟效益顯著。
手動堆取煤易造成缺角或超限現象,影響煤場的庫容和設備安全。自動堆取煤則完全沒有上述現象,大大提高了煤場庫容率和設備的安全性。
手動操作需要斗輪機司機在現場人工操作,而遠程全自動控制系統投運后,操作員在煤控室通過上位機發出斗輪機啟動命令后即可完成堆取煤任務,勞動強度大幅度減輕,工作環境大為改善。
4 結語
利用自動控制技術、激光三維掃描技術、GPS精確定位技術、圖像監控技術、安全防范技術等手段,建立數字化堆場信息,實現斗輪機由現場人工手動操作到遠程全自動控制模式的轉變,不但降低人員勞動強度和維護成本,而且提高設備運行可靠性和整個系統的經濟性,從而實現斗輪機運行操控由司機室到煤控室的轉變,經過一段時間的運行,系統穩定可靠,效益明顯。
在現有斗輪機全自動集中控制平臺基礎上,下一步的研究可結合輸煤程控系統,實現輸煤程控與斗輪機聯動,達到斗輪機的操作完全與輸煤程控一體化。
[1]柳日勇.基于插值的高斯投影算法在煤場斗輪機GPS定位中的應用[J].科技傳播,2014(11)∶111-112.
[2]羅春民,魏小剛,劉千波.基于精準定位的散料場設備運行監控系統研發及應用[J].中國水運,2013,13(12)∶134-136.
[3]顧奕華,張子才.散料場堆取料機防碰撞控制[J].冶金自動化,2010,34(1)∶6-9.
[4]王蒙,孫良環.基于圖像分析的上煤流量自動控制系統應用分析[J].節能,2011(5)∶8-10.
[5]閆軍,周志霞.基于PLC的斗輪堆取料機自動控制系統設計[J].礦山機械,2009(1)∶42-44.
[6]莫劍.輸煤系統斗輪堆取料機電氣改造[J].華東電力,2001(7)∶47-48.
[7]雷斌.斗輪堆取料機單機全自動化系統的研究與設計[D].長沙:湖南大學,2013.
[8]李建君,于洪濤,薛士龍.新型斗輪堆取料機自動作業控制系統研究[G]//第12屆全國測控、計量、儀器儀表學術年會論文集.
(本文編輯:徐 晗)
Application of Remote Control System of Bucket Wheel Machine in Coal-fired Power Plant
CHEN Yonghui1,WU Yongpeng1,SHEN Binhua2
(1.Zhejiang Zheneng Yueqing Power Generation Co.,Ltd.,Wenzhou Zhejiang 325609,China;2.Hangzhou Jiyi Technology Co.,Ltd.,Hangzhou 310012,China)
This paper introduces the application of a full-automatic remote control system of bucket wheel in coal-fired power plant.The control system integrates GPS positioning,laser-based real-time flow detection, three-dimensional laser measurement,image monitoring and safety precautions,enabling full-automatic remote control of bucket wheel machine.The real operation shows that the full-automatic control can improve the operation efficiency of bucket wheel machine,lower the labor intensity of workers,enhance the utilization of coal yard and the operation safety of equipment,bringing remarkable economic returns to power plants.
bucket wheel machine;remote;control;laser-based real-time flow detection;GPS positioning
TK39
B
1007-1881(2016)08-0053-03
2016-04-25
陳永輝(1966),男,高級工程師,長期從事發電廠技術及管理工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34