采摘機械手的路徑規劃——基于相似矢量矩免疫遺傳算法
2016-03-23 07:21:46王崇剛李明江
農機化研究 2016年10期
王崇剛,李明江
( 1.貴州職業技術學院 信息技術系,貴陽 550023;2.黔南民族師范學院 計算機科學系,貴州 都勻 558000)
?
采摘機械手的路徑規劃——基于相似矢量矩免疫遺傳算法
王崇剛1,李明江2
( 1.貴州職業技術學院 信息技術系,貴陽550023;2.黔南民族師范學院 計算機科學系,貴州 都勻558000)
摘要:為了提高果蔬采摘機器人機械手采摘路徑規劃決策的效率,降低數據分析的冗余性,在分析生物免疫系統功能、作用機理及特點的基礎上,提出了一種基于相似性矢量距的免疫遺傳算法,并將其植入到了機械手躲避障礙物的決策系統中。該算法利用相似矢量矩方法將選擇概率的局部搜索和整體搜索有機地結合起來,使算法保留了最優抗體,保證了計算不陷入局部最優解,并使抗體的計算具有了多樣性。為了驗證算法的有效性和可靠性,設計了果實采摘機器人的測試樣機。通過測試發現:機器人機械手動作過程中可以有效地躲避障礙物,到達指定的目標采摘區域,在相似矢量矩免疫遺傳算法、免疫遺傳算法和相似矢量矩3種算法的測試結果中,相似矢量矩免疫遺傳算法的收斂性最好,優化路徑最優。
關鍵詞:采摘機器人;數據冗余性;免疫遺傳算法;相似矢量矩;機械手
0引言
從計算角度來說,生物免疫遺傳系統是一個高度并行、自適應和自組織的分布式系統,其學習能力、識別能力和記憶能力很強。近年來,受到生物免疫系統的啟發,人工免疫算法迅速發展,作為智能計算方法,已經被應用到了故障診斷、圖像處理和多智能體的決策系統中,在機器人設計和網絡診斷領域發揮了重要的作用。在果蔬采摘機器人的采摘作業過程中,機械手如何成功地繞過障礙物,是提高機器人作業效率和作業質量的關鍵。其中,最好的方法是采用機器視覺方法,但由于數據量較大,算法的冗余性較為明顯。為了提高計算速度,本研究使用免疫遺傳算法對決策系統進行設計,并利用相似矢量矩對算法進行優化,對采摘機器人決策系統的升級研發具有重要的意義。
1采摘機器人系統硬件框架和決策流程
在果實采摘機器人的設計過程中,機器人采摘路徑規劃和決策系統是設計的關鍵。系統設計包括軟件部分和硬件部分的設計:軟件部分可以引入相關算法;硬件部分考慮系統模塊的劃分,其結構設計如圖1所示。
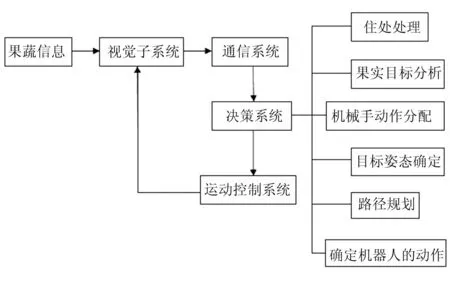
圖1 果蔬采摘機器人決策系統硬件框架
硬件系統模塊包括通信系統、決策系統和運動控制系統。通過3個模塊的設計,實現果蔬采摘機器人信息處理、果實目標分析、機械手動作分配、目標姿態確定、路徑規劃和機器人動作,其決策流程如圖2所示。圖2主流程包括全局層、角色層和動作層3個層次的順序的動作。首先,利用全局層采集果實和障礙物圖,并對其進行處理;然后,確定目標的位置姿態;最后,對路徑進行決策。在路徑規劃過程中,將障礙物利用隨機方法在解析空間內產生初始抗體,并對其進行編碼。為了降低計算的冗余性,使用計相似矢量矩對免疫遺傳算法進行優化,來提高路徑決策規劃的效率。
2果蔬采摘決策系統執行末端
果蔬采摘機器人的組成為3部分,包括末端決策執行器、機械臂和移動平臺。其中,在機器人的各個部分裝有傳感器,如在移動平臺裝有方位傳感器、視覺傳感器和紅外線傳感器等。本設計的果蔬采摘機器人的執行末端結構如圖3所示。
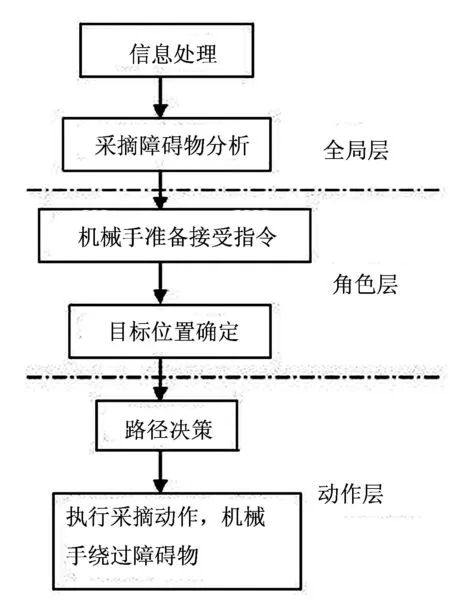
圖2 果蔬采摘機器人決策流程圖
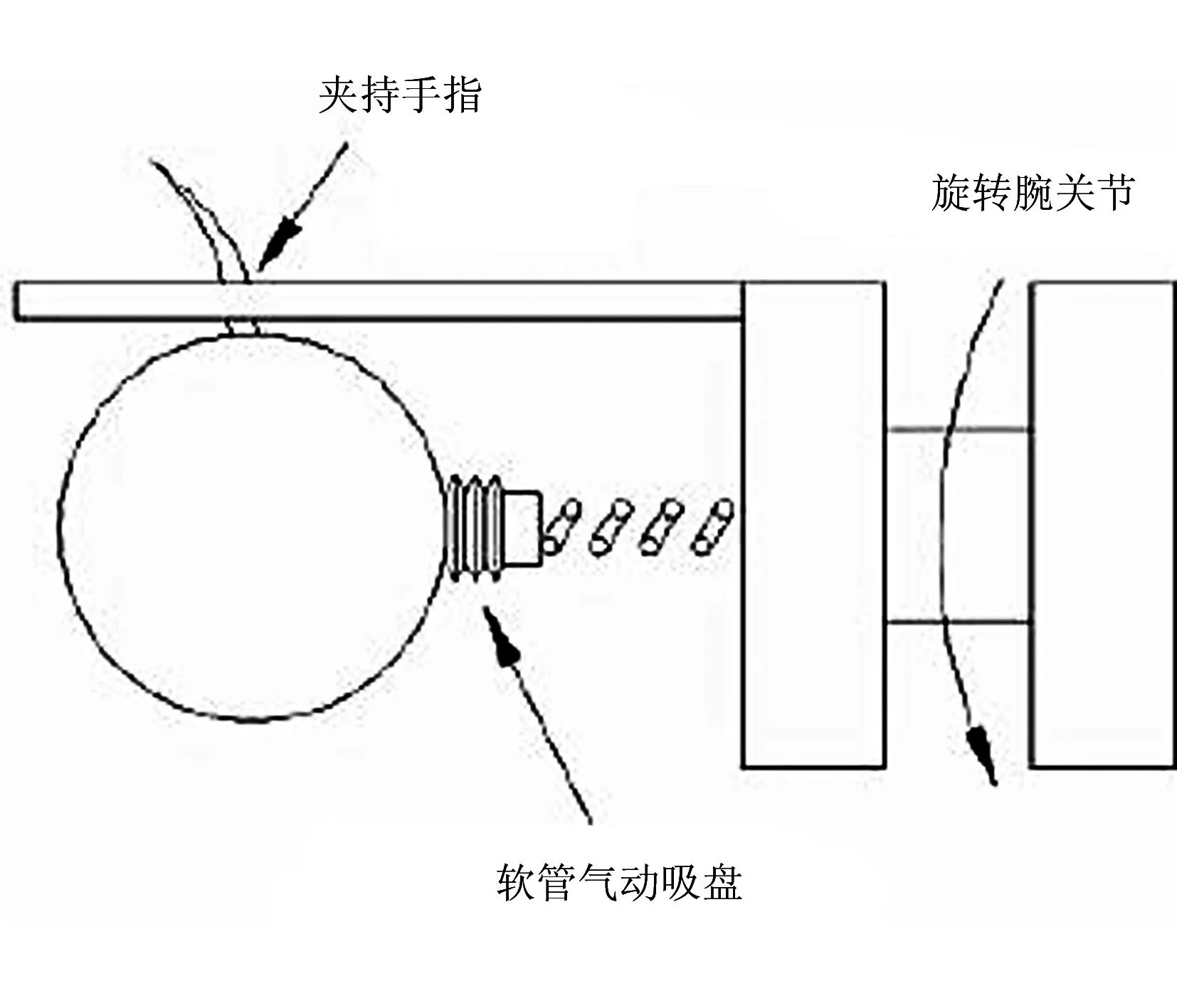
圖3 采摘機器人執行末端結構
采摘機器人的末端決策執行機構裝有真空吸盤,當果實被吸盤吸入時,壓力檢測開關監測是否為負壓。如果為負壓,則確定果實被吸附,發出指令將果實向后拉一段距離。當果實和障礙物分離后,機械手的手指固定果實,并將其旋轉一定的角度,在合適的位置上切割裝置將果梗切斷,果實和果梗進行分離,完成果實的收割決策。其中,果實成熟度的判斷利用高清攝像機,其安裝位置如圖4所示。作業時,機器人通過高清攝像機識別成熟果實,并將執行末端利用圖像跟蹤和路徑軌跡決策系統將其送到果實目標位置,其數據的處理量較大。
為了提高計算的速率和準確性,在圖像處理決策系統設計中采用相似矢量矩免疫遺傳算法,將其植入決策系統單片機中,提高指令發送的效率。
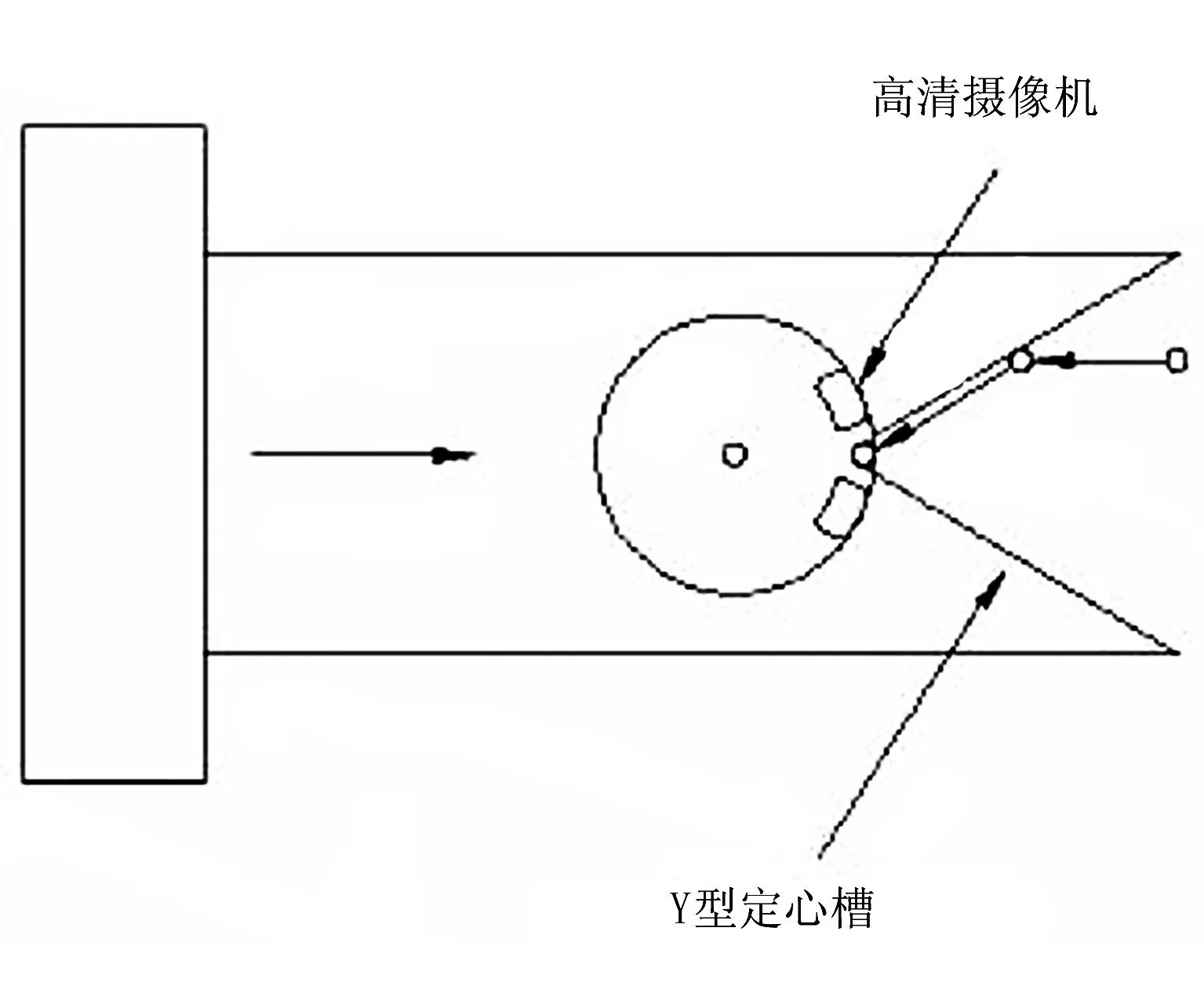
圖4 執行末端攝像機
3基于相似矢量矩免疫遺傳算法的采摘決策系統
現代免疫遺傳學認為,免疫系統通過全身分布的免疫細胞的協同性來完成工作。免疫細胞分為吞噬細胞和淋巴細胞,淋巴細胞又分為B細胞和T細胞。其中,B細胞主要有骨髓產生,具有免疫功能;T細胞有胸腺產生,執行免疫的協調和特殊任務功能。人工免疫算法的一般步驟如圖5所示。
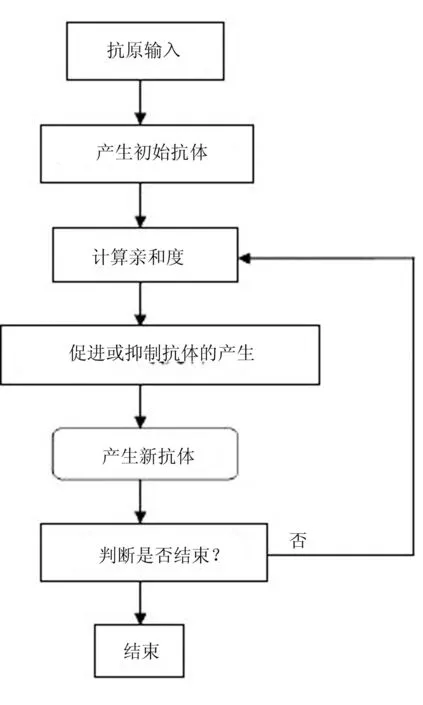
圖5 人工免疫算法的一般步驟
根據圖5所示的免疫遺傳過程示意圖,將抗原、B細胞和抗體分別對應于函數優化的目標函數、優化xi和自適應函數f(xi)。為了避免計算的冗余,引入相似矢量矩的概念,將搜索區間進行縮小。假設一個非空集合X由N個抗體組成,則抗體f(xi)在該集合上的距離為
(1)
根據矢量矩的定義,抗體濃度計算公式可以寫成
(2)
因此,矢量矩的選擇概率為
(3)
集合中的基因與i相似程度越高,抗體i被選中的概率就越小。假設抗體a1,a2,…,an和抗體b1,b2,…,bn的矢量矩為
(4)
其中,s值越小,表示兩者的相似程度越高。因此,可以將抗體的i濃度重新定義為
(5)
其中,λ表示閾值,該閾值是確定的,將其應用在果蔬采摘機器人的機械手采摘路徑決策系統中。假設機械手和果實直接存在n個障礙物,利用相似矢量矩免疫遺傳算法搜索尋找一條最短距離,其描述函數可表示為
(6)
其中,n為障礙物的編號;ci為xi的基因。那么,適應度函數為
(7)
選擇概率的相似性矢量矩可以定義為
(8)
其中,α、β表示調節因子。選擇概率與矢量矩和相似度有關,這樣保證了計算不陷入局部最優解,使抗體的計算具有了多樣性。
4果蔬采摘機器人決策系統測試
為了驗證本次設計的基于相似矢量矩免疫算法決策系統的有效性和可靠性,設計了果蔬采摘機器人樣機,并在樣機中裝載了基于相似矢量矩免疫算法的決策系統,采摘過程如圖6所示。

圖6 果蔬采摘機器人決策系統測試
測試過程包括對最短距離決策的收斂性測試和繞過障礙物尋找最短路徑的測試。最短距離的收斂曲線測試結果如圖7所示。
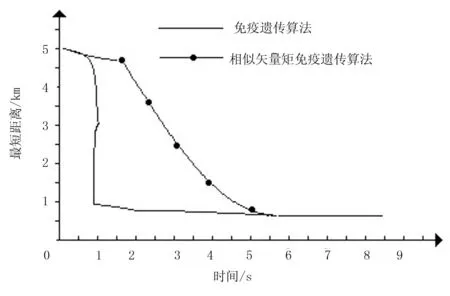
圖7 路徑決策系統算法收斂性曲線
由圖7可以看出:利用免疫算法和相似矢量矩免疫遺傳算法得到的收斂曲線存在明顯的不同。其中利用相似矢量矩后可以有效地提高計算速度,使計算更加收斂。
為了驗證相似矢量矩在免疫遺傳算法路徑決策中的作用,對相似矢量矩、免疫遺傳算法和相似矢量矩免疫遺傳3種方法進行了測試。其中,相似矢量矩路徑決策系統的測試結果如圖8所示。
由圖8可知:相似矢量矩算法可以使機器人能夠成功地繞過障礙物,到達指定采摘目標點;但由于算法待需優化,其決策路徑并不是最優的。
免疫遺傳算法路徑決策系統的測試結果如圖9所示。由圖9可知:免疫遺傳算法也可以使機器人能夠成功地繞過障礙物,到達指定采摘目標點,但是其決策路徑仍然不是最優的。
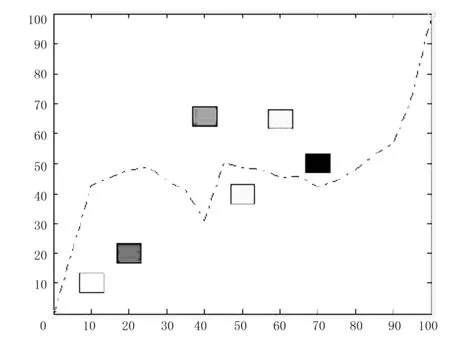
圖8 相似矢量矩路徑決策系統測試結果
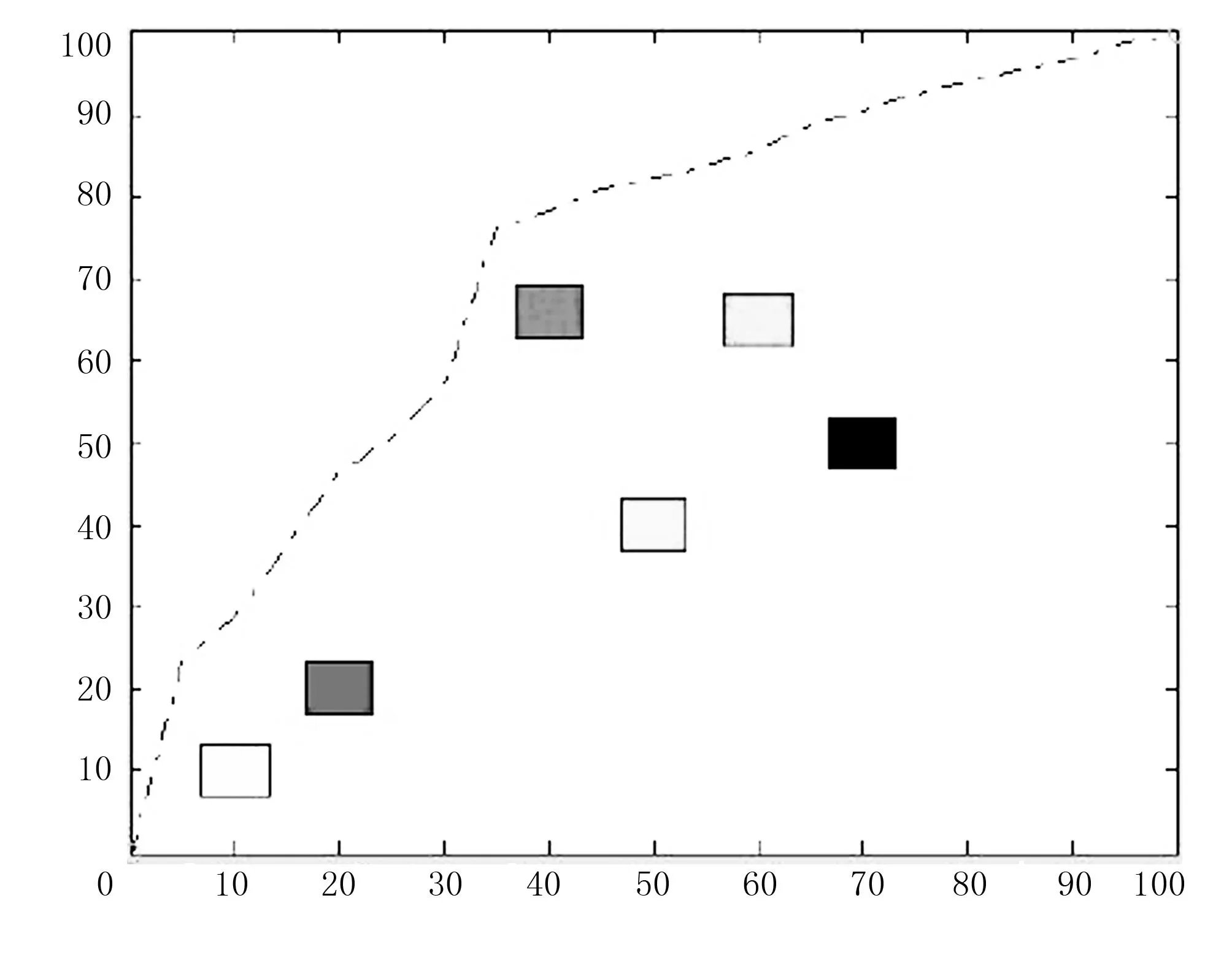
圖9 免疫遺傳算法路徑決策系統測試結果
圖10表示相似矢量矩免疫遺傳算法路徑決策系統的計算結果。
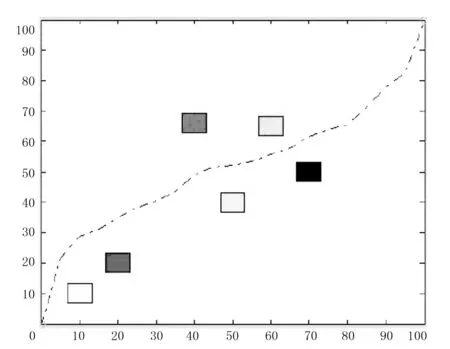
圖10 相似矢量矩免疫遺傳算法系統測試結果
由圖10可以看出:在3種路徑跟蹤結果中,該路徑最優。這是由于相似矢量矩的選擇和保優測量產生了作用,其可以調節群體的選擇力度和多樣性。相比傳統的遺傳算法,相似矢量矩在個體最優的基礎上,將局部搜索和總體搜索有效地結合了起來,使其在果實采摘機器人機械手采摘路徑決策系統中發揮了較好效果。
5結論
1)在免疫遺傳算法的基礎上,提出了一種基于相似矢量矩的改進算法,并將其應用到了采摘機器人的機械手采摘路徑規劃決策系統中,提高了決策的效率,降低了數據搜索的冗余性。該算法利用自適應函數和抗體濃度及矢量矩,將局部搜索和整體搜索有機地結合了起來,使搜索具有局部最優解和整體的多樣性,保證了算法的精確性。
2)通過測試發現:相似矢量矩、免疫遺傳算法和相似矢量矩免疫遺傳3種方法都能使機械手成功的躲避障礙物,到達指定的采摘目標位置。其中,相似矢量矩免疫遺傳算法的收斂性最好,優化路徑最短,優越性最為明顯,因此可以應用到采摘機器人的機械手決策系統中。
參考文獻:
[1]武濤,袁池,陳軍.基于機器視覺的獼猴桃果實目標提取研究[J].農機化研究,2011,33(12):21-26.
[2]李寒,王庫,曹倩,等.基于機器視覺的番茄多目標提取與匹配[J].農業工程學報,2012,28(5):168-172.
[3]馮娟,劉剛,王圣偉,等.采摘機器人果實識別的多源圖像配準[J].農業機械學報,2013,44(3):197-203.
[4]盧軍,王賢鋒,候德家.水果采摘機器人視覺系統研究進展[J].湖北農業科,2012,51(21):4705-4708.
[5]姬偉,程風儀,趙德安,等.基于改進人工勢場的蘋果采摘機器人機械手避障方法[J].農業機械學報,2013(11):253-259.
[6]畢昆,趙馨,侯瑞鋒,等.機器人技術在農業中的應用方向和發展趨勢[J].中國農學通報,2011,27(4):469-473.
[7]張潔,李艷文.果蔬采摘機器人研究現狀、問題及對策[J].機械設計,2010,27(6):1-4.
[8]王津京,趙德安,姬偉,等.采摘機器人基于支持向量機蘋果識別方法[J].農業機械學報,2009,40(1):148-151.
[9]屠珺,劉成良,李彥明,等.基于光照不變圖的蘋果識別方法[J].農業工程學報,2010,26(S2):26-31.
[10]熊俊濤,鄒湘軍,陳麗娟,等.基于機器視覺的自然環境中成熟荔枝識別[J].農業機械學報,2011,42(9):162-166.
[11]王儉,趙鶴鳴,陳衛東.基于子區域的機器人全覆蓋路徑規劃的環境建模[J].蘇州科技學院學報:工程技術版,2004,17(1):72-75.
[12]馮秀軍,楊立東.2BDY-8型2壟密型高速氣吹式精密播種機簡析[J].農業機械,2007(8):85-86.
[13]孟慶山.水源熱泵機組變流量水系統節能優化探討[J].制冷與空調,2010,10(1):84-89.
[14]謝志勇,張鐵中,趙金英.基于Hough變換的成熟草莓識別技術[J].農業機械學報,2007,38(3):106-109.
[15]王東,趙宇,王秀紅.一種改進的DFT迭代的MIMO-OFDM系統信道估計算法[J].應用科技,2009(3):19-22.
[16]徐文穎,張靜,董建萍.導頻信道估計中的插值算法[J].海師范大學學報,2007,12(6):41-46.
[17]王建軍,武秋俊.機器人在農業中的應用[J].農機化研究,2007(7):174-176.
[18]郝冬,劉斌.基于模糊邏輯行為融合路徑規劃方法[J].計算機工程設計,2009,30(3):660-663.
[19]王建軍,武秋俊.機器人在農業中的應用[J].農機化研究,2007(7):174-176.
[20]陳暉,陳曉光.基于直接判決導頻跟蹤的OFDM系統快時變信道估計[J].通信學報,2006,9(27):1-5.
[21]李文見,姬江濤.輪履復合式農業機器人越避障控制研究[J].河南科技大學學報:自然科學版,2007(8):57-59.
[22]王仲民,戈新良,唐智強.多傳感器信息融合技術研究現狀和發展趨勢[J].河北工業大學學報,2003,32(2):30-35.
[23]國剛,王毅.應用BP神經網絡進行手寫體字母數字識別[J].人工智能及識別技術,2008,4(6):1459-1460.
[24]李二超,李戰明,李煒.基于神經網絡的機器人關節轉矩力控制研究[J].電氣自動化,2011,33(1):23-27.
Path Planning of Picking Manipulator——Based on Similarity Vector Moment and Immune Genetic Algorithm
Wang Chonggang1, Li Mingjiang2
(1.Department of Information Technology,Guizhou Vocational Technology Institute, Guiyang 550023, China; 2.Department of computer science, Qiannan Normal College for Nationalities, Duyun 558000, China)
Abstract:In order to improve the efficiency and reduce the redundancy of data analysis, a new immune genetic algorithm is proposed based on similarity vector distance and the analysis of the function and mechanism of biological immune system.In this algorithm,the local search and global search of the selection probability is combined with the method of similarity vector moment, which makes the algorithm retain the optimal antibody, and ensure that the computation does not fall into local optimal solution. In order to verify the validity and reliability of the algorithm, the test prototype of the fruit picking robot is designed. The algorithm can effectively avoid obstacles and reach the designated target picking area. In the test results of three kinds of algorithm, the immune genetic algorithm, immune genetic algorithm and similarity vector moment algorithm, the optimal path is optimized.
Key words:picking robot; data redundancy; immune genetic algorithm; similarity vector moment; manipulator
中圖分類號:S225;TP241
文獻標識碼:A
文章編號:1003-188X(2016)10-0037-05
作者簡介:王崇剛 (1980-),男,貴州貴定人,講師,碩士。通訊作者:李明江(1975-),男,貴州思南人,副教授,碩士,(E-mail)wcglmj2015@sina.com。
基金項目:貴陽國家高新技術產業開發區管理委員會科技型中小企業技術創新基金項目(GXCX2013-006);國家開放大學2014-2015年度科研項目(G14A3602W);貴州省科技廳科學技術基金項目(黔科合J字 LKQS[2013]10號)
收稿日期:2015-08-31
