農機數據采集傳輸系統的設計與實現—基于CAN總線
2016-03-23 07:32:43劉傳茂
農機化研究 2016年12期
劉傳茂,王 熙
(黑龍江八一農墾大學 工程學院,黑龍江 大慶 163319)
?
農機數據采集傳輸系統的設計與實現—基于CAN總線
劉傳茂,王熙
(黑龍江八一農墾大學 工程學院,黑龍江 大慶163319)
摘要:隨著CAN總線的發展應用,越來越多的農業機械開始裝備使用CAN總線,采集農機CAN數據對于農機作業運行及故障維修的應用研究具有重要意義。農機CAN總線數據采集傳輸系統,能夠實時采集、解析、傳輸農機CAN總線數據信息,且可將數據傳輸到PC機進行數據處理和數據分析。為此,詳細介紹了基于單片機、CAN控制器及CAN收發器的農機CAN總線數據采集傳輸系統,并給出了硬件設計和軟件實現。試驗表明:該系統將發動機轉速、油耗、經緯度、高程等數據解析并傳輸存儲,在實際應用過程中,系統可靠性好,信息準確、運行正常。
關鍵詞:農機數據;數據解析;控制器局域網;CAN
0引言
近年來,隨著我國農業機械化、現代化的迅速發展,農機總量、農機作業水平及信息化技術應用水平不斷提高,對提高農業生產效率、增加糧食產量發揮了重要作用[1]。拖拉機、收獲機及噴藥機等農機是實現農業機械化和現代化的重要動力機械。電子控制技術已逐步應用到這些農機各個系統中,如發動機控制系統、動力輸出系統、后懸掛系統及駕駛操作系統等。為適應農機電子控制設備的應用需要,控制器局域網 (CAN總線) 應運而生[2]。CAN總線是一種串行多主站控制器局域網總線,主要原理是把車身上相關控制器都聯系起來,實現發動機控制器、變速箱控制器、車身控制器及其它控制器的通信[3]。車身CAN網絡中包含有農機車身狀態信息數據及農機作業時的各信息數據,對農機CAN數據采集并解析可以得到農機的作業狀態信息。
本文探討了基于CAN總線的采集傳輸裝置設計和實現,詳細闡述了系統的整體設計、硬件電路設計及軟件設計流程。所開發的系統裝置用于在農機作業過程中實時采集農機 CAN總線數據信息,并對數據進行篩選解析,然后通過RS-232串口通信傳輸到PC機,同時將數據存儲在 U 盤中,可運用 PC 機上的軟件對數據進行分析。該設計實現了現場傳輸和U盤存儲同時進行的模式,克服了以往現場數據采集系統必須有1臺PC機的模式,可了解農機作業期間各種數據信息變化,同步記錄作業狀態,在農機長時間作業以后,存儲的數據可用于分析農機行駛性能的運行情況和作業情況。
1系統的總體設計
由于CAN總線本身良好的功能特性, 已經廣泛應用到現場數據采集系統、汽車制造以及農業等領域內[4]。本文所設計的基于 CAN 總線數據采集傳輸系統應用在進口的大馬力農機上,對農機CAN 網絡數據進行采集和傳輸存儲。考慮到系統功能的需求,整個系統由主控制器、CAN控制器、CAN收發器、RS-232模塊及U盤存儲模塊等組成,如圖1所示。
系統工作時,CAN接線與農機CAN接口相連,采集農機CAN數據信息。該系統不僅可以采集CAN數據信息,還可以將CAN數據解析并傳輸存儲。其中,傳輸既可以采用實時有線傳輸,也可以通過GPRS模塊實現實時無線傳輸。同時,解析后的數據可以實時存儲到U盤中,方便以后對農機數據進行分析。
2系統硬件設計
按照整體設計, 系統硬件電路主要由以下幾大模塊組成:主控制器模塊、CAN 接口模塊、電源模塊、RS-232串口通信模塊及無線傳輸存儲等模塊。

圖1 系統結構框圖
2.1 主控制器模塊
本系統主控制器采用是STC89C52RC單片機,是由宏晶科技公司生產的一款具有低功耗、高性能8位CMOS微控制器,成本低廉比較容易獲得,可采用C語言進行程序編程,易于維護升級。主控制器是整個系統的核心,主要負責整個系統的初始化設置和數據的采集,還可進行數據的篩選解析以及數據傳輸。其主要特性如下:
1)工作頻率范圍:0~40MHz,相當于普通8051的0~80MHz,實際工作頻率可達48MHz(滿足數據采集要求)。
2)用戶應用程序空間為8kB,片上集成512kB RAM(滿足功能需要)。
3)ISP(在系統可編程)/IAP(在應用可編程),無需專用編程器,直接通過串口下載用戶程序,數秒即可完成(程序維護升級簡便)。
4)工作溫度范圍:-40~+85℃(工業級,滿足工作環境要求)。
2.2 CAN接口模塊
CAN接口模塊主要是由CAN控制器模塊和CAN收發器模塊組成的,整個接口模塊主要負責對農機CAN網絡上的數據進行接收采集。本系統的CAN控制器選用的是SJA1000,是一種常用的CAN控制器,能夠兼容CAN2.0B擴展幀,而且易于學習和開發[5]。SJA1000提供了與主控制器之間的數據線接口,其工作狀態的設置和控制是由主控制器來編程實現的。CAN收發器選擇PAC82C250,為SJA1000與農機CAN物理總線之間提供了數據線接口。其將CAN物理總線上接收的信號轉換為SJA1000可以接收的電平信號,然后SJA1000將CAN報文數據發送給主控制器進行相關的處理。
2.3 電源模塊
本系統的電源依靠農機配備的12V蓄電池電源,為了保證給整個系統一個穩定的電壓,采用了穩壓電源電路。因為主控制器及CAN接口模塊需要5V電壓穩定供電,所以設計使用一個LM7805穩壓器將12V轉變為5V電壓,并使用了一個容值為0.1μF的電容來消除高頻干擾,使輸出的5V電壓穩定純凈。其電路如圖2所示。同時,在電路中增加了兩個單向二極管,用來防止電壓過大或正負極顛倒而損壞系統電子元件。考慮到LM7805在工作過程中的散熱問題,實際使用中,設計安裝與其匹配的散熱片,加速散熱,增加LM7805的使用壽命。

圖2 穩壓電源電路圖
2.4 RS-232串口通信模塊
本系統中,選用MAX232作為串口通信的主芯片,完成系統的通信傳輸及主控制器的程序下載燒寫[6]。MAX232采用DIP16封裝,為了防止干擾,在芯片引腳上接入電容。芯片一邊引腳與單片機相連接,另一邊引腳與DB9相連,實現系統串口通信功能。串口部分電路圖如圖3所示。
3系統軟件設計
本文系統中,主控制器功能程序軟件編程是基于STC89C52RC單片機開發的。軟件編程開發采用的是Keil C51單片機C語言開發工具軟件。從整個系統的性能維護、編寫周期、程序改進等各方面考慮,程序軟件采用模塊化的設計方式,同時采用C語言來進行編程。包含系統主控制器的初始化設置、CAN控制器SJA1000的初始化設置、串口通信的初始化設置及數據的采集解析傳輸等功能程序。其中,設計了一個看門狗復位程序,使系統在突然死機的情況下,能夠復位重新工作。圖4是系統整體程序的設計流程圖。

圖3 串口模塊電路圖

圖4 整體程序流程圖
3.1 SJA1000初始化程序
在完成整體系統及實現數據采集功能之前,需要先對CAN控制器進行初始化設置,即根據所要實現的目的功能對相關的寄存器進行初始化設置。針對本文系統所使用的CAN控制器SJA1000進行初始化,包括對其工作模式的選擇、中斷系統的設置、CAN波特率的設置及驗收濾波器的設置等。這些初始化設置實際上就是對SJA1000內部相關的寄存器進行的寫操作[7]。SJA1000首先進入復位模式, 然后對相關寄存器進行初始化工作;在相關寄存器初始化工作完成以后,退出復位模式,進入操作模式,完成整個CAN控制器的初始化工作。圖5是SJA1000初始化程序流程圖。

圖5 SJA1000初始化流程圖
3.2 CAN數據采集解析程序
數據采集程序主要負責對農機CAN網絡中的數據進行采集,在處理采集數據的同時,要對錯誤報警、接收溢出及總線關閉等情況進行處理。
本系統中,CAN控制器SJA1000報文的接收方式采用中斷接收,在有農機CAN信號傳輸后,觸發中斷程序,CAN收發器將采集的信號傳輸到CAN 控制器SJA1000,SJA1000開始接收報文。農機CAN數據采集程序主要是讀取總線中斷、錯誤和溢出狀態;打開接收緩存器讀取報文;緩沖區釋放等過程。
主控制器對采集到的CAN數據根據ISO11783協議[8]和CAN總線協議,進行相應的ID篩選,得到發動機信息、地理位置信息及時間信息等數據幀,然后按照相應的協議進行具體實際參數值的解析傳輸[9],從而得到農機作業時具體各參數值。
4系統的田間試驗研究
本系統實現的功能就是能夠采集農機CAN數據,并將采集到的CAN數據,按照農機ISO11783協議進行相應的篩選、解析,從而得到農機發動機及作業數據的實際參數值。在系統研究設計完成后,考慮到農機作業環境比較惡劣,故對系統進行田間農機作業數據采集試驗研究,以便使整個系統的穩定性、功能性及實用性更加完善和穩定,達到實際應用的要求。
4.1 田間試驗地點
試驗地點為榮軍農場,隸屬于黑龍江農墾總局九三分局,位于嫩江縣與訥河市交界處;田間試驗地塊為榮軍農場十五連隊的第十四號地,地塊面積大約30hm2。
4.2 系統安裝與試驗
試驗所用車型為約翰迪爾7830型拖拉機,車身配備有CAN總線網絡、CAN物理接線口及星火GPS設備,將設計的系統通過接線與拖拉機上的CAN物理接線口相連接,使系統與拖拉機CAN網絡連接起來,從而可實現CAN數據的采集。
啟動拖拉機,開始進行整地作業,同時系統上電工作,開始采集并解析農機CAN數據。
4.3 試驗數據處理
解析后的農機作業數據可以通過GPRS無線傳輸到PC機中,也可以同時存儲到U盤中,然后將U盤中的數據拷貝到PC機中,用于農機作業數據的分析處理。U盤中傳輸得到的數據是以.txt為擴展名存儲的,每條記錄包括日期、時間、經度、緯度、高程、發動機油耗、轉速、發動機負荷率、后懸掛狀態及發動機工作小時數等。表1是存儲的試驗作業數據。

表1 試驗記錄數據
從表1可以看到:本文設計的系統能夠實現采集農機CAN數據,并經過解析傳輸存儲得到了農機作業實際參數值,然后對這些作業數據進行分析處理。本文采用MatLab工具軟件作為農機作業數據分析處理的工具,首先把U盤中存儲的.txt文檔的數據提取到EXCEL表格中,然后導入MatLab軟件中,對其中的經度、緯度、高程及發動機油耗等參數進行變量設置。利用MatLab分析軟件強大的數據可視化功能,進行分析處理得到農機作業軌跡圖、作業軌跡與高程變化圖及作業軌跡與油耗變化圖等,進而對其作業時的狀態進行檢測分析。
圖6是農機田間作業時的軌跡圖。由圖6可以看到農機在這一地塊作業時的軌跡路線,對作業的GPS軌跡進行分析,根據作業時的幅寬,進而計算出作業面積。
圖7是農機作業軌跡與高程的變化圖。其中,顏色的變化代表高程的變化。從圖7中可以看到作業地塊地勢的變化、地塊高程變化的范圍及整個地塊一個大致的平均海拔。
圖8是農機作業軌跡與發動機油耗的變化圖,同樣顏色的變化代表油耗的變化。從圖8中可以清晰地看到農機在進行整地作業時發動機的瞬時油耗和作業時油耗的范圍大小。對得到的所有油耗數據進行統計計算,可以得出作業這一地塊需要消耗多少的油量,從而進一步分析作業的經濟性。

圖6 作業軌跡圖

圖7 作業軌跡與高程變化圖
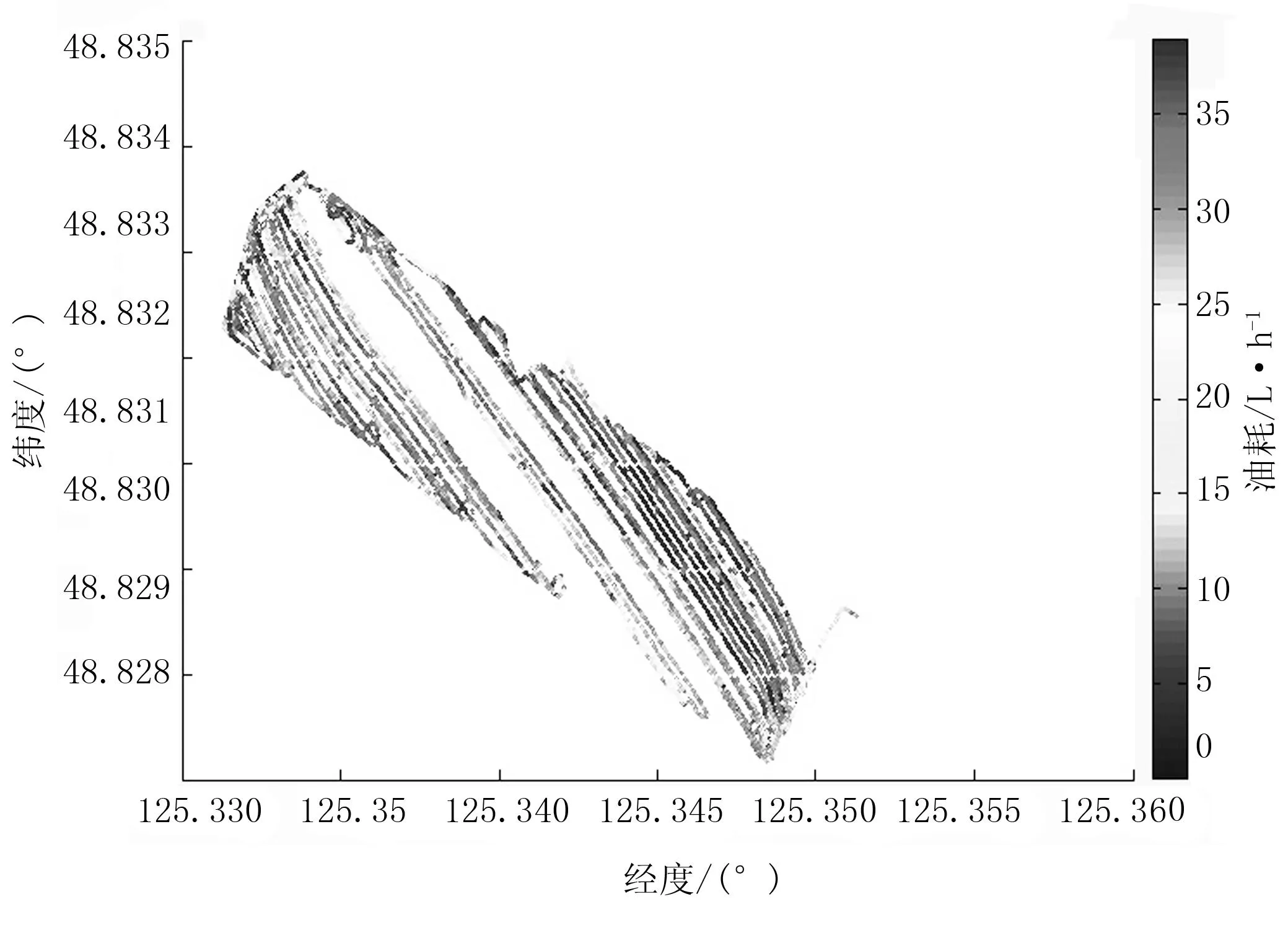
圖8 作業軌跡與油耗變化圖
5結論
詳細介紹了農機CAN數據采集傳輸系統的設計,并基于農機ISO11783協議對農機CAN數據進行篩選解析,最后傳輸存儲得到農機作業時的日期、時間、經緯度、高程、發動機油耗、發動機轉速等實際參數值。同時,通過MatLab軟件分析處理,直觀地得到了關于拖拉機的作業行駛狀態,為進一步的統計分析奠定了基礎。在對得到的部分數據進行分析處理過程中,深感農機作業數據采集的重要性,隨著CAN總線技術應用及精準農業的不斷發展,農機作業數據對農機管理運營必將有更重要的應用。
參考文獻:
[1]黎運宇,李明.我國農業機械化新技術應用與展望[J].中國農機化學報,2014(3):296-301.
[2]侯占峰,魯植雄,趙蘭英,等.CAN總線技術在拖拉機上的應用展望[J].農機化研究,2006(10):184-186.
[3]魯植雄,王文偉,袁越陽.基于CAN總線的拖拉機虛擬儀表系統設計[J].農業裝備與車輛工程,2010(2): 3-6.
[4]紀朝鳳,劉剛,周建軍,等. 基于CAN總線的農業車輛自動導航控制系統[J]. 農業機械學報,2009(S1): 28-32.
[5]崔巍.基于CAN總線技術的智能汽車系統的設計[J].裝備制造技術,2012(8):263-265.
[6]李俐,謝顯中.基于CAN總線的行車記錄儀設計[J].計算機工程與設計,2009(22):5120-5123.
[7]于成毅.CAN總線數據記錄儀的研究與設計[D].太原:中北大學,2011.
[8]周建軍,鄭文剛,李素,等.基于ISO 11783的拖拉機導航控制系統設計與試驗[J].農業機械學報,2010(4):184-188.
[9]劉傳茂,王熙.基于CAN總線的拖拉機作業數據解析[J].農機化研究,2015,37(10):254-257.
Design and Implementation of Agricultural Machinery Data Acquisition and Transmission System—Based on CAN bus
Liu Chuanmao, Wang Xi
(College of Engineering, Heilongjiang Bayi Agricultural University, Daqing 163319, China)
Abstract:With the development of CAN bus, more and more agricultural machinery equipment is equipped with CAN bus. Collect agricultural machinery CAN data, which is very important for the agricultural machinery operation and application research of maintenance.Agricultural machinery CAN data acquisition and transmission system can real-time gather the information of agricultural machinery CAN-Bus as well as parse and storage data.Farther, the system transfer data to PC and uses it to process and analyze the measure. This paper presents the agricultural machinery CAN data acquisition and transmission system based on microcontroller, CAN controller and CAN transceiver and sets forth its hardware and software. The experimental studies show that the system parse and transmission of storage engine speed, fuel consumption, latitude and longitude, elevation, etc. In the actual testing process, the system reliability is good, the information is accurate, the operation is normal.
Key words:agricultural machinery data; controller area network;data parsing; CAN
中圖分類號:S242
文獻標識碼:A
文章編號:1003-188X(2016)12-0207-05
作者簡介:劉傳茂(1990-),男,山東汶上人,碩士研究生,(E-mail)408029753@qq.com。通訊作者:王熙(1962-),男,山西新絳人,教授,博士生導師,(E-mail)ndwangxi@163.com。
基金項目:“十二五”國家高技術研究發展計劃項目(2013AA040401);
收稿日期:2015-10-30
黑龍江八一農墾大學研究生創新科研項目(YJSCX2015-Y13);黑龍江省大慶市項目(szdfy-2015-28)
