雙閉環控制采摘機器人機械手設計—基于PLC和CAN總線
2016-03-23 07:32:45陳曉龍
農機化研究 2016年12期
何 龍,陳曉龍
( 1.成都航空職業技術學院 航空維修工程系,成都 610100;2.西安電子科技大學 機電工程學院,西安 710071)
?
雙閉環控制采摘機器人機械手設計—基于PLC和CAN總線
何龍1,陳曉龍2
( 1.成都航空職業技術學院 航空維修工程系,成都610100;2.西安電子科技大學 機電工程學院,西安710071)
摘要:采用雙閉環控制系統,基于PLC運動控制器和CAN總線,提出了一種新的采摘機器人機械手關節分布式控制方案,并采用模塊化思想設計了機器人關節電機控制系統、CAN模塊及PLC控制器。采摘機器人機械手的關節采用諧波減速器進行調節,利用霍爾傳感器和紅外線傳感器及光電編碼器進行圖像、轉速和障礙物觸碰的信號采集,采集信號利用A/D轉換器將數據傳輸給PLC控制器。機械手的執行末端采用CAN總線控制,并利用變頻器傳遞的通信信號,實現了末端執行器的并行控制,使多機械手處于最佳動作狀態。最后,在雙閉環控制方案的基礎上加入了前饋控制環境,利用前饋控制環節可以實現對系統的實時控制,改善了系統的靜態性能,實現了機械手對實際采摘位置的有效追蹤。實驗和仿真模擬表明:位移時間曲線平滑無突變,表明機器人在運行過程中平穩、無振動,機器人工作的可靠性較高,對路徑的追蹤精度較高。
關鍵詞:采摘機器人;雙閉環控制;諧波減速器;A/D轉換器;CAN總線
0引言
農業機器人在現代化農業生產中的應用,不僅大幅度提高了勞動生產效率,也使勞動資源得到了合理配置,大大改善了農業生產環境,提高了農作物的產量。但是,由于農業環境的非結構性、果實對象分布不確定性和果實易損等特性,要求農業機器人具有開放式的控制系統和高度智能化的機械手結構。CAN總線按時間表分配和按需要分配,將其應用到了采摘機器人的末端執行器控制設計中,可以有效地提高控制效率和降低控制成本。
1機械手雙閉環控制原理
采用雙閉環控制系統可以有效地提高采摘機器人的控制效率和控制精度,而CAN是已經被認同的高性能和可靠性控制方案,已經被廣泛地使用到了工業自動化、船舶和醫療設備等的自動化控制過程中。CAN總線是現場自動化控制研究領域的熱點之一,是自動化領域的計算機局域網,為分布式控制及節點可靠實時數據的傳輸提供了強大的支持。PLC采摘機器人控制器主要由機械手控制末端、可編程控制器、變頻器和調速電機組成,其框架結構如圖1所示。整個控制過程采用雙閉環控制方案,其控制結構如圖2所示。
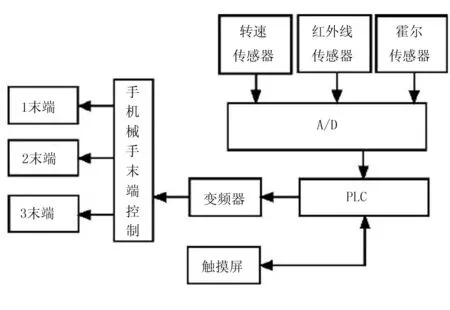
圖1 基于PLC的采摘機械手控制器

圖2 雙閉環控制過程圖
在常規轉速傳感器控制的基礎上,以接觸障礙物使霍爾傳感器采集的力學信號為反饋值,將反饋值的誤差E和誤差變化率EC作為輸入,使用模糊推理法對控制參數進行整定,從而滿足了控制器對不同參數的要求,使控制對象具有較好的靜態性能和動態性能。機械手關節的CAN總線控制流程如圖3所示。

圖3 機械手關節CAN總線控制
其控制過程主要包括系統和各功能模塊的初始化、電流環調節的子程序、CAN通信的子程序及A/D 采樣中斷子程序等,利用CAN總線可以提高機器人控制的效率。
2末端執行器結構和伺服控制系統
在溫室條件下,機器人主要靠數目視覺來進行路徑劃分和自主導航控制,其性能取決于圖像分割和特征提取技術;而采摘精度主要受采摘機械手定位精度、采摘的速度及執行末端的控制。機械手末端執行器三維模型如圖4所示。

圖 4 采摘機械手末端執行器三維模型
為了改進手指剛性的適應性較差的問題,將夾持的兩個手指安置在同一個平面內,另一個與它們的位置平行,增加了機械手的活動范圍。機械手的電機控制機械結構如圖5所示。

圖5 機械手的電機控制機械結構
圖5中,手指的控制采用欠平衡驅動原理,手指的并攏由腕部螺紋導桿控制。在復位彈簧的復位作用下,3根手指可以實現自主張開,在采摘時,利用上部的剪刀將果柄切斷。為了提高控制的精度,使用光電編碼器和諧波減速器對機械手進行控制,其結構如圖6所示。

圖6 驅動關節模型
驅動系統的減速器使用扁平式的諧波減速器,由4部分組成,包括輸入鋼輪、柔輪、波發生器和輸出鋼輪4部分。電機轉速的采集主要使用光電編碼器,通過采集2次脈沖計數來計算轉速,計算公式為

(1)
其中,(k)表示電機轉動角速度;T表示采樣的周期。轉速計算時,電路中經常會出現干擾,導致兩次采樣信號的間隔時間較短,在進行微分計算時干擾的噪聲會被放大,導致計算得到的轉速和實際轉速相差較大。因此,需要通過濾波方法對速度的數值進行濾波。這里利用一階低通數字濾波器對計算數據進行處理。連續時間的一階低通濾波器的表達式為

(2)
其中,τc表示濾波的時間常數。

(3)


(4)

對于光電編碼器轉速數值的計算和保存,可以通過CAN總線進行數據傳輸。在主程序中,首先將CAN通信模塊進行初始化,然后設定接收端,接收信息的寄存器相應的標位置為1;在中斷程序時,讀取速度信息,并將其存入相應的變量中。
3實驗和仿真模擬測試
為了測試PLC和CAN總線在采摘機器人控制系統中的可靠性,對實驗教學使用的六自由度機械手進行了改進,并以黃瓜采摘作為作業對象,對機械人的采摘性能進行了測試。教學用機器人結構如圖7所示,其關節利用6個舵機進行控制,但是各關節缺少相應的反饋裝置。

圖7 教學用六自由度機械手
為此,對其進行了改進,利用雙閉環控制原理,設計了PLC硬件電路和CAN總線控制器,改進后的機械手如圖8所示。在不破壞機械臂機構的前提下,得到的機械手結構,其關節的控制電機使用直流電機,根據機械手的事物各種參數,建立如圖9所示的機械手仿真模型。利用正運動仿真原理,輸入期望的關節角度,通過仿真模擬計算,使機器人到達指定的末端位姿,模擬工具選擇MatLab工具箱的Robotics Toolbox。通過仿真模擬計算,得到如圖10的機器人機械手的運動軌跡。

圖8 改進后的機械手

圖9 機器人位姿仿真模型

圖10 機器人機械手運動軌跡XOZ面投影
由仿真曲線可以看出:末端執行機構在水平方向在-800~800mm 范圍內工作點密集,而該機器人的設計工作區間為58.25cm,可以滿足機器人工作實際空間的需要。
為了提高采摘機械手的控制精度,加入了前饋控制環境,利用前饋控制環節可以實現對系統的實時控制,對給定不變性可以直接根據給定信號進行控制,改善了系統的靜態性能,實現了機械手對實際采摘位置的有效追蹤。通過實驗和仿真模擬,最終得到了機械手的位置最終曲線,其結構如圖11所示。
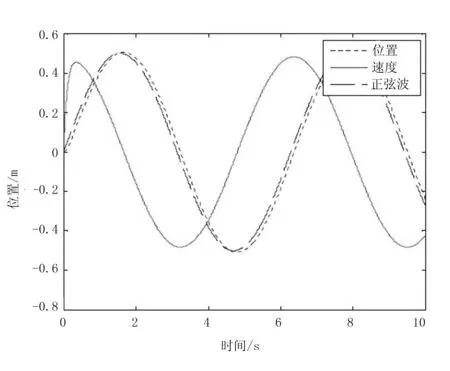
圖11 位置追蹤仿真結果曲線
圖11中,追蹤過程采用正弦波諧波減速器控制。由計算結果可以看出:位移時間曲線平滑無突變,表明機器人在運行過程中平穩,無振動。在諧波減速器的控制下,利用雙閉環控制系統,機械手以較高的精度對實際位置進行了追蹤,從而驗證了基于PLC和CAN總線控制的采摘機械手工作的穩定性和可靠性。
4結論
1)提出了一種新的采摘機器人雙閉環控制系統。該系統以PLC控制器和CAN總線作為控制工具,利用傳感器完成了各種信號的采集,基于直流電機對執行末端進行控制,并使用諧波減速器對機械手的關節進行調節,有效地提高了采摘機器人的控制效率。
2)通過使用MatLab工具箱的Robotics Toolbox仿真工具對采摘機器人機械手的追蹤性能進行了測試,并采用前置反饋調節的形式對追蹤曲線進行了仿真模擬。由計算結果可以看出:機器人在運行過程中平穩、無振動,可靠性和控制精度均較高。
參考文獻:
[1]李榮麗,賀利樂.煤炭采樣機械臂的剛柔耦合動力學建模與仿真分析[J].機械設計,2013, 10(4):55-59.
[2]王鵬,朱龍英,崔振萍,等.輪履組合式環保機器人的設計與分析[J].機械科學與技術,2012, 1(1):44-45.
[3]薛金林,徐麗明.多功能農業機器人及其關鍵技術分析[J].安徽農業科學,2009,37(15):7201- 7203.
[4]張文增,馬獻德,黃源文,等.末端強力抓取的欠驅動擬人機械手[J].清華大學學報:自然科學版,2009,49(2):194-197.
[5]盧偉,宋愛國,蔡健榮,等.柑橘采摘機器人結構設計及運動學算法[J].東南大學學報:自然科學版,2010,41(1):95-100.
[6]楊文珍,梁春輝,陳文華,等.ZSTU擬人靈巧手設計與仿真[J].系統仿真學報,2011,23(12): 2617-2622.
[7]馬貴飛,馬履中,楊文亮.蘋果采摘機器人機械手運動學分析與仿真[J].農機化研究,2010,32 (1):31-35.
[8]陸由斌,胡國棟,呂健,等.基于ADAMS的6自由度機器人的正解與逆解[J].機電產品開發與創新,2010,23(1):11-15.
[9]謝俊,匡俐輝,馬履中,等.一種新型的串聯中醫推拿機械臂的運動學仿真[J].機械設計,2011, 23(2):20-25.
[10]陳文良,謝斌,宋正河,等.拖拉機電控液壓動力轉向系統的研究[J].農業工程學報,2006,22(10): 122-124.
[11]韓高樓.GPS 定位技術的優缺點[J].陜西建筑,2010(2):56-58.
[12]李洪欣,楊建中.基于兩參數的表冷器建模方法研究[J].建筑熱能通風空調,2009,28(6):15-17.
[13]孟慶山.水源熱泵機組變流量水系統節能優化探討[J].制冷與空調,2010,10(1):84-89.
[14]謝志勇,張鐵中,趙金英.基于Hough 變換的成熟草莓識別技術[J].農業機械學報,2007,38(3):106-109.
[15]王東,趙宇,王秀紅.一種改進的DFT迭代的MIMO-OFDM系統信道估計算法[J].應用科技,2009,3(3):19-22.
[16]徐文穎,張靜,董建萍.導頻信道估計中的插值算法[J].上海師范大學學報,2007,12(6):41-46.
[17]陳暉,陳曉光.基于直接判決導頻跟蹤的OFDM系統快時變信道估計[J].通信學報,2006,27(9):1-5.
[18]李文見,姬江濤.輪履復合式農業機器人越避障控制研究[J].河南科技大學學報:自然科學版,2007(8):57-59.
[19]王仲民,戈新良,唐智強.多傳感器信息融合技術研究現狀和發展趨勢[J].河北工業大學學報,2003,32(2):30-35.
[20]國剛,王毅.應用BP神經網絡迭代進行手寫體字母數字識別[J].人工智能及識別技術,2008,4(6):1459-1460.
[21]施少敏,馬彥恒,陳建泗.基于BP神經網絡迭代的數字識別方法[J].兵工自動化,2006,25(10):40-41.
[22]許穎泉.用神經網絡迭代進行數字圖像識別研究[J].應用科技,2008(12):59-60.
[23]紀晴,段培永,李連防,等.移動機器人全覆蓋路徑規劃算法綜述[J].山東建筑大學學報,2007,22(4):354-358.
[24]王儉,陳衛東,趙鶴鳴.移動機器人全覆蓋路徑規劃優化方法[J].計算機工程,2005,31(22):162-163.
[25]吳修文,馮曉霞,孫康嶺,等.農用機器人導航電子地圖的研究[J].農業裝備與車輛工程, 2010(3):40-42.
[26]朱向慶,陳志雄.采用GPS 和GPRS 的移動目標監控導航系統設計[J].計算機測量與控制, 2011, 19(5):1133-1136.
[27]李界家,陳浩,李穎.神經網絡迭代算法解耦控制在中央空調系統中的應用[J].沈陽建筑大學學報,2012,28(1):182-186.
補充更正公告
茲于本刊2016年8月1日出版的《基于模糊控制的拖拉機路徑跟蹤仿真研究》,由于作者疏漏原因,經與作者溝通商量協調,特對如下文章內容進行如下補充更正:
1.作者添加:原作者序列為“石翔、馬蓉、張長龍、梁錦;”更正為“石翔、李文春、馬蓉、張長龍、梁錦”;原“Shi Xiang、Ma Rong、Zhang Changlong、Liang Jin”改為“Shi Xiang、Li Wenchun、Ma Rong、Zhang Changlong、Liang Jin”
2.(李文春)作者單位添加:新疆阿拉爾萬達農機有限公司,新疆 阿拉爾843300;Xinjiang Wanda Modern Agricultural Equipment Limited by Share Co.Ltd., Alar 843300, China。
3.課題編號添加:原課題編號為“國家高技術研究發展計劃項目(2013AA102307)”更正為“國家高技術研究發展計劃項目(2013AA102307);新疆生產建設兵團南疆專項(2013BA048)”。
作者:石翔
2016年2月16日
Robot Manipulator Design for Double Closed Loop Control—Based on PLC and CAN BUS
He Long1, Chen Xiaolong2
(1.Department of Aeronautic Maintenance Engineering,Chengdu Aeronautic Vocational and Technical College, Chengdu 610100, China;2. School of Electro-Mechanical Engineering, Xidian University,Xi′an 710071, China)
Abstract:A new robot manipulator joint distributed control scheme is proposed based on the PLC motion controller and CAN BUS by using the double closed-loop control system. The robot joint motor control system CAN module and PLC controller are designed with the idea of modular design. The mechanical hand of the robot is used to adjust the joint of the robot hand. The signal acquisition is acquired by using the Holzer sensor and infrared sensor and the photoelectric encoder. The signal is acquired by the A/D converter and the signal is transmitted to the PLC controller. At the end of the manipulator,the CAN bus is used to control the communication signal,and the parallel control of the end effector is realized.At last,the feed forward control environment is added to the system based on the double closed-loop control scheme.The static performance of the system is improved. The results show that the robot is stable and reliable in operation.
Key words:robot manipulator; double closed-loop control; harmonic reducer; A/D converter; CAN bus
中圖分類號:S225;TP241.3
文獻標識碼:A
文章編號:1003-188X(2016)12-0242-05
作者簡介:何龍(1973-),男,四川遂寧人,副教授。通訊作者:陳曉龍(1976-),男,西安人,副教授,博士,(E-mail)dragon2015long@sina.com。
基金項目:四川省教育廳自然科學基金重點項目(14ZA0309)
收稿日期:2015-09-12
