電動(dòng)力噴霧機(jī)控制系統(tǒng)設(shè)計(jì)與試驗(yàn)
2016-03-23 07:32:46榮喃喃王冉冉齊苗苗
農(nóng)機(jī)化研究 2016年12期
榮喃喃,王 震,李 杰,王冉冉,齊苗苗
(1.山東農(nóng)業(yè)大學(xué) 機(jī)械與電子工程學(xué)院,山東 泰安 271018;2.山東省園藝機(jī)械與裝備重點(diǎn)實(shí)驗(yàn)室,山東 泰安 271018;3.國(guó)網(wǎng)泰安供電公司,山東 泰安 271018)
?
電動(dòng)力噴霧機(jī)控制系統(tǒng)設(shè)計(jì)與試驗(yàn)
榮喃喃1,王震2,李杰3,王冉冉1,齊苗苗1
(1.山東農(nóng)業(yè)大學(xué) 機(jī)械與電子工程學(xué)院,山東 泰安271018;2.山東省園藝機(jī)械與裝備重點(diǎn)實(shí)驗(yàn)室,山東 泰安271018;3.國(guó)網(wǎng)泰安供電公司,山東 泰安271018)
摘要:針對(duì)現(xiàn)代電動(dòng)力農(nóng)業(yè)機(jī)械自動(dòng)化發(fā)展不成熟的現(xiàn)狀,為彌補(bǔ)電動(dòng)力噴霧機(jī)在遠(yuǎn)程智能控制方面的不足,設(shè)計(jì)了自走式電動(dòng)力噴霧機(jī)控制系統(tǒng)。通過各部件需求分析和計(jì)算,研制了電動(dòng)力輸出裝置和遠(yuǎn)程控制系統(tǒng),實(shí)現(xiàn)了各部件協(xié)調(diào)工作及遠(yuǎn)程遙控噴霧作業(yè)。整機(jī)動(dòng)力來源為60V鉛酸蓄電池串聯(lián)組,通過控制系統(tǒng)工作試驗(yàn)可知:整機(jī)電動(dòng)力傳輸效率為88.8%,遙控信號(hào)接收并處理成功率達(dá)99%;整機(jī)電動(dòng)力利用率較高,續(xù)航時(shí)間達(dá)2.98 h。
關(guān)鍵詞:噴霧機(jī);電動(dòng)力;控制系統(tǒng)
0引言
隨著能源緊缺問題的嚴(yán)重和大氣污染程度的加劇,以電動(dòng)力為代表的新能源農(nóng)機(jī)具逐漸成為農(nóng)機(jī)領(lǐng)域的發(fā)展趨勢(shì)。此類機(jī)具以電動(dòng)力替代配套柴油或汽油動(dòng)力,具有結(jié)構(gòu)簡(jiǎn)潔緊湊、控制靈活、低碳高效、無尾氣噪音污染和維護(hù)成本低的優(yōu)點(diǎn)[1-2]。
當(dāng)前正處于電動(dòng)力和農(nóng)機(jī)具的技術(shù)磨合期,農(nóng)機(jī)具的控制自動(dòng)化程度較低,針對(duì)此發(fā)展現(xiàn)狀,以噴霧機(jī)為例設(shè)計(jì)研制了一套適用于微型農(nóng)機(jī)具的電動(dòng)力遠(yuǎn)程控制系統(tǒng)。整機(jī)采用了先進(jìn)的電動(dòng)汽車驅(qū)動(dòng)技術(shù),設(shè)計(jì)了電動(dòng)力傳輸子系統(tǒng),搭載紅外遠(yuǎn)程遙控信號(hào)處理子系統(tǒng),有效地提高了控制命令收發(fā)的準(zhǔn)確度和能源利用率,為智能化電控技術(shù)在農(nóng)機(jī)領(lǐng)域的應(yīng)用提供范例。
1控制系統(tǒng)組成及工作原理
控制系統(tǒng)主要包括行走驅(qū)動(dòng)子系統(tǒng)和遠(yuǎn)程控制子系統(tǒng)。其主要工作流程:根據(jù)提前設(shè)定的工作信號(hào)代碼,使用手持式遙控發(fā)射器發(fā)射前進(jìn)信號(hào);安裝在車體上的遙控信號(hào)接收設(shè)備立即接收此信號(hào),經(jīng)內(nèi)部微處理器處理后向電機(jī)控制器發(fā)出整車前進(jìn)的命令信號(hào),電機(jī)控制器控制伺服電機(jī)按照命令前進(jìn);在前進(jìn)過程中,可隨時(shí)發(fā)送轉(zhuǎn)向信號(hào),調(diào)整行走路線,使整車到達(dá)預(yù)定噴霧地點(diǎn);果農(nóng)此時(shí)發(fā)送噴霧信號(hào)(包括啟動(dòng)中壓風(fēng)機(jī)和高壓水泵的命令),整個(gè)過程按照預(yù)設(shè)路線行走,即可遠(yuǎn)程遙控完成噴霧作業(yè)[3]。其協(xié)同工作原理圖如圖1所示。

圖1 工作原理圖
2行走驅(qū)動(dòng)子系統(tǒng)
行走驅(qū)動(dòng)子系統(tǒng)包括后橋驅(qū)動(dòng)系統(tǒng)和轉(zhuǎn)向系統(tǒng)。
2.1 后橋驅(qū)動(dòng)系統(tǒng)
驅(qū)動(dòng)橋位于動(dòng)力傳輸線的末端,其基本功能是增大變速器傳遞的轉(zhuǎn)矩,將轉(zhuǎn)矩合理分配給左右驅(qū)動(dòng)輪,實(shí)現(xiàn)差速行駛[4]。同時(shí),驅(qū)動(dòng)橋作為整車機(jī)械部分的重要部件,還要承受作用于路面和車架的鉛垂力和橫向力[5]。本次設(shè)計(jì)考慮到惡劣的農(nóng)田作業(yè)環(huán)境和整車較大載荷,驅(qū)動(dòng)系統(tǒng)所要承受的載荷和作用力矩都比較大,因此驅(qū)動(dòng)部件應(yīng)具有足夠的承載力、翹度和剛性。綜合考慮整車前進(jìn)的通過性和平順性,驅(qū)動(dòng)系統(tǒng)采用一體式后橋驅(qū)動(dòng)系統(tǒng)總成,主要包括三相無刷直流電機(jī)、主減速器、差速器、驅(qū)動(dòng)車輪的傳動(dòng)裝置和橋殼等,如圖2所示[6-8]。

圖2 后橋驅(qū)動(dòng)總成
2.2 轉(zhuǎn)向系統(tǒng)
轉(zhuǎn)向系統(tǒng)采用電動(dòng)助力轉(zhuǎn)向系統(tǒng)(Electric Power Steering,EPS),即由轉(zhuǎn)向電機(jī)提供輔助轉(zhuǎn)矩,其助力的大小和方向由電子控制單元(ECU)控制,只在需要助力的時(shí)候起動(dòng)電動(dòng)機(jī)[9]。EPS是近年來比較流行的動(dòng)力轉(zhuǎn)向器,沒有電液動(dòng)力轉(zhuǎn)向器的體積大、部件多、管路漏油等造成的耗能、污染環(huán)境的缺點(diǎn),且EPS的機(jī)械結(jié)構(gòu)和應(yīng)用部件較簡(jiǎn)單,安裝起來非常方便[10-12]。噴霧機(jī)工作在路況較差的農(nóng)田,整車工作時(shí)轉(zhuǎn)向阻力較大,因此采用轉(zhuǎn)向齒輪驅(qū)動(dòng),即轉(zhuǎn)向電機(jī)及轉(zhuǎn)向器與轉(zhuǎn)向小齒輪相連。
3遠(yuǎn)程控制子系統(tǒng)
遠(yuǎn)程控制子系統(tǒng)是所有信號(hào)的接收和處理系統(tǒng),其精確性和穩(wěn)定性是決定噴霧作業(yè)是否達(dá)標(biāo)完成的重要因素。整個(gè)遠(yuǎn)程控制系統(tǒng)主要由手持式遙控信號(hào)發(fā)射器、遠(yuǎn)程信號(hào)接收設(shè)備及電機(jī)控制器組成。
3.1 信號(hào)發(fā)射和接收設(shè)備
該遙控信號(hào)收發(fā)設(shè)備裝置安裝在農(nóng)機(jī)具上,工作環(huán)境處于濕度較大的農(nóng)田,遙控距離較遠(yuǎn);同時(shí)要滿足冬季和夏季施藥的高溫、低溫情況,因此信號(hào)收發(fā)的精準(zhǔn)度相對(duì)于理想情況有所降低。加之機(jī)具應(yīng)用人群為廣大果農(nóng),遙控裝置要操作簡(jiǎn)單易掌握。綜合分析,設(shè)計(jì)信號(hào)發(fā)射和接收裝置采用紅外感應(yīng)方式,由8路繼電器實(shí)現(xiàn)簡(jiǎn)單通斷控制。其裝置工作電壓為24V,信號(hào)頻率為315MHz,紅外感應(yīng)距離達(dá)2km,開闊地接收靈敏度大于-103 dBm,傳輸速率大于10kbps,調(diào)制方式為調(diào)幅。為增加遙控裝置的功能可擴(kuò)展性,對(duì)碼方式設(shè)定為智能學(xué)習(xí)型,可根據(jù)不同的功能需求定制修改。首次使用時(shí)完成清碼和對(duì)碼,設(shè)置為自鎖工作模式,以后即可正常使用。根據(jù)噴霧作業(yè)流程,預(yù)先設(shè)置8路信號(hào)為前進(jìn)、后退、剎車、左轉(zhuǎn)向、右轉(zhuǎn)向、風(fēng)機(jī)、水泵和一路預(yù)留信號(hào)。
3.2 電機(jī)控制器
電機(jī)控制器控制伺服電機(jī)執(zhí)行整車行走命令,是整個(gè)電控系統(tǒng)的核心所在,也是本次設(shè)計(jì)的重心所在,其性能的優(yōu)劣直接決定了噴霧作業(yè)效率。電機(jī)控制器的直接作用對(duì)象為三相無刷直流電機(jī)(BLDC),為實(shí)現(xiàn)控制系統(tǒng)的穩(wěn)定性,同時(shí)優(yōu)化算法、節(jié)省經(jīng)費(fèi)投入、縮短研發(fā)時(shí)間,設(shè)計(jì)研制時(shí)重點(diǎn)使用MatLab/Simulink建立仿真控制模型,然后進(jìn)行優(yōu)化設(shè)計(jì)、制作調(diào)試。
3.2.1電機(jī)運(yùn)行數(shù)學(xué)模型
圖3所示為BLDC的控制框圖,分析BLDC(星結(jié))的工作模態(tài),建立式(1)~式(4)來表征電機(jī)本體模型[13]。式(1)~式(3)表示了3個(gè)相電壓的計(jì)算公式,其為電阻電壓、電感電壓和反電動(dòng)勢(shì)的矢量和,則

(1)

(2)

(3)

(4)
其中,U、i、e為相間電壓、相電流及反向電動(dòng)勢(shì);R、L為各相電阻和電感;Te為電磁轉(zhuǎn)矩;TL為負(fù)載轉(zhuǎn)矩;kf為摩擦因數(shù);ωm為電機(jī)角速度。

圖3 BLDC控制框圖
各相反電動(dòng)勢(shì)為
(5)

(6)

(7)
電磁轉(zhuǎn)矩為

(8)
其中,ke、kt為反電動(dòng)勢(shì)系數(shù)和轉(zhuǎn)矩系數(shù);θe為電角度(θe=pθm/2);函數(shù)F(θe)表示反電動(dòng)勢(shì)梯形波形。
F(θe)的一個(gè)周期為
(9)
為了更便捷地在MatLab/Simulink中建模,根據(jù)相間電壓公式,利用基爾霍夫電流定律(KCL),把電機(jī)的數(shù)學(xué)模型轉(zhuǎn)化為空間矩陣形式[13]。其具體計(jì)算過程不再贅述,BLDC完整的數(shù)學(xué)矩陣模型為


(10)

(11)
3.2.2MatLab/Simulink 模型與仿真
根據(jù)模塊化建模思想,將圖3所示的控制系統(tǒng)分割為各個(gè)功能獨(dú)立的子模塊,主要包括電機(jī)本體模塊、邏輯換相模塊、橋式驅(qū)動(dòng)模塊速度、速度和電流控制模塊等。
1)仿真模型建立。根據(jù)式(10)~式(11)搭建電機(jī)模型,主要包括電機(jī)本體模塊、反電動(dòng)勢(shì)方程模塊及轉(zhuǎn)速檢測(cè)反饋模塊。模型中的參數(shù)均來自于一體式后橋驅(qū)動(dòng)系統(tǒng)中的三相無刷直流電機(jī)的官方說明書,BLDC模型如圖4所示。為方便分區(qū)、節(jié)省空間,反電動(dòng)勢(shì)模塊和轉(zhuǎn)速檢測(cè)模塊已集成子系統(tǒng)[14-15]。電機(jī)控制主回路采用三相全橋逆變電路,根據(jù)三相導(dǎo)通六狀態(tài)的工作時(shí)序原理[16],采用Pulse Generator觸發(fā)各橋臂IGBT導(dǎo)通和關(guān)斷,脈沖寬度設(shè)為50%,周期設(shè)定為0.02 s。根據(jù)開始時(shí)刻來設(shè)定延遲時(shí)間,仿真時(shí)采用變步長(zhǎng)的odel5s算法。

圖4 無刷直流電機(jī)模型
完整的控制仿真界面如圖5所示。圖中,速度控制模塊、電流控制模塊等其他部分均已封裝為子系統(tǒng)。

圖5 BLDC控制系統(tǒng)仿真界面
2)仿真試驗(yàn)結(jié)果。根據(jù)彌霧機(jī)作業(yè)情況設(shè)定參數(shù),電機(jī)工作電壓為60V,電機(jī)轉(zhuǎn)速為3 000r/min。
首先運(yùn)行仿真系統(tǒng),觀察轉(zhuǎn)速的波形圖,如圖6所示。從轉(zhuǎn)速情況來看,電機(jī)運(yùn)行情況比較穩(wěn)定,在啟動(dòng)的0.085 s達(dá)到工作轉(zhuǎn)速,且轉(zhuǎn)速維持平穩(wěn)狀態(tài)。
設(shè)定參數(shù),仿真電機(jī)的停止過程,觀察波形(見圖7),電機(jī)在接到停止的信號(hào)命令之后的0.09 s,轉(zhuǎn)速由3 000r/min變化為0,降速過程平穩(wěn),滿足農(nóng)藥噴施均勻的作業(yè)要求。
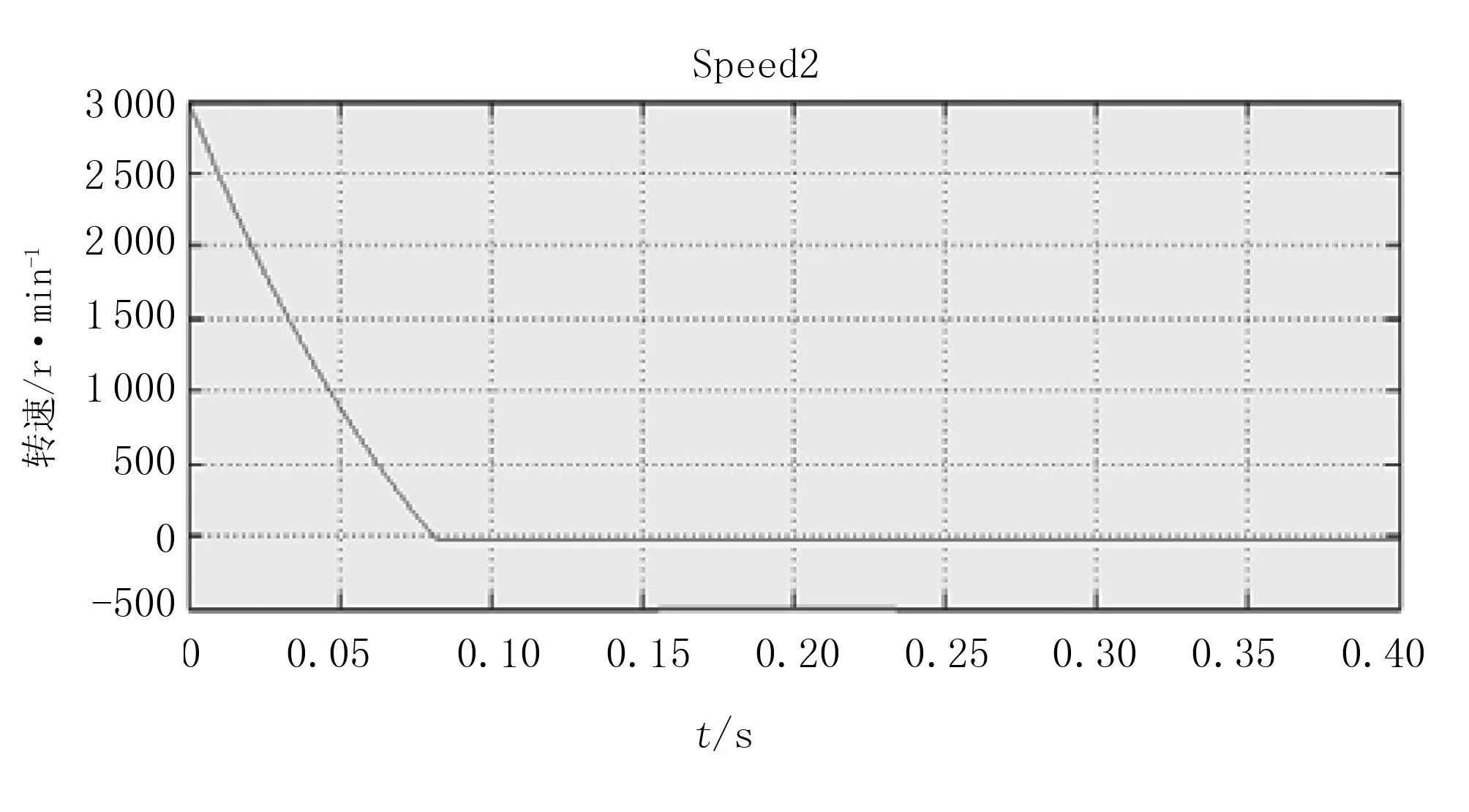
圖7 停止轉(zhuǎn)速
圖8所示為在系統(tǒng)運(yùn)行過程中添加外來干擾,克服擾動(dòng)的過程。仿真采用變動(dòng)負(fù)載轉(zhuǎn)矩的方式,從放大的圖片來看,系統(tǒng)調(diào)節(jié)能力比較好,能夠在1 s內(nèi)從不穩(wěn)定狀態(tài)恢復(fù)到穩(wěn)態(tài)。

圖8 干擾測(cè)試轉(zhuǎn)速波形
從以上仿真試驗(yàn)分析來看,電機(jī)整個(gè)控制系統(tǒng)比較穩(wěn)定、精準(zhǔn),滿足噴霧作業(yè)的要求。但因仿真系統(tǒng)各參數(shù)偏理想化,提速和降速時(shí)間均小于實(shí)際工作情況,故在實(shí)際電機(jī)控制器研制時(shí)序設(shè)計(jì)方面應(yīng)適當(dāng)留有部分時(shí)間余量。
4控制系統(tǒng)工作測(cè)試
4.1 測(cè)試系統(tǒng)平臺(tái)搭建
根據(jù)以上各系統(tǒng)主要部件分析、設(shè)計(jì)和制作,搭建了整個(gè)控制系統(tǒng),如圖9所示。值得注意的是控制系統(tǒng)處在藥液飄散的噴霧帶,所處的環(huán)境濕度很大,故各部件均需搭配外殼。
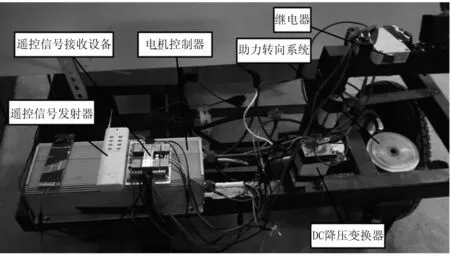
圖9 控制系統(tǒng)實(shí)物圖
4.2 控制系統(tǒng)測(cè)試方案和結(jié)果分析
4.2.1測(cè)試方案
試驗(yàn)在山東農(nóng)業(yè)大學(xué)試驗(yàn)田進(jìn)行,為完整測(cè)試遙控信號(hào)的收發(fā)情況,選取了5處周邊障礙物情況不同的地方。
1)5處地方編號(hào)為①~⑤,其地帶開闊等級(jí)逐漸降低,每處均發(fā)射3次前進(jìn)、停止、倒車、轉(zhuǎn)彎和噴霧信號(hào),發(fā)射距離均大于500m,記錄控制系統(tǒng)的信號(hào)收發(fā)情況并觀察小車運(yùn)行情況。
2)在每一處試驗(yàn)時(shí)測(cè)量控制電路部分點(diǎn)位的電壓和電流值,計(jì)算其工作功率。主要點(diǎn)位為蓄電池組輸出端、降壓變換器輸出端、中壓風(fēng)機(jī)的輸入端、高壓水泵輸入端,同時(shí)記錄小車運(yùn)行的時(shí)間和里程。
4.2.2測(cè)試結(jié)果分析
表1為整個(gè)試驗(yàn)的數(shù)據(jù)統(tǒng)計(jì)表。
1)從表1中可看出:共計(jì)75次信號(hào)發(fā)射接收試驗(yàn),1次失敗,且失敗出現(xiàn)在周圍障礙物較多的⑤號(hào)場(chǎng)地。試驗(yàn)的信號(hào)收發(fā)成功率平均為99%,而一般作業(yè)場(chǎng)地的信號(hào)收發(fā)成功率為100%。
2)每次場(chǎng)地試驗(yàn)時(shí)均大致估算總工作效率,開闊性較好的場(chǎng)地工作效率較高,試驗(yàn)平均工作效率為88.8%。
3)整車電動(dòng)力能源利用率較高,5塊鉛酸蓄電池組可支持整機(jī)平均續(xù)航2.98 h。
從以上數(shù)據(jù)分析證明,本電動(dòng)噴霧機(jī)的控制系統(tǒng)設(shè)計(jì)合理,各項(xiàng)功能滿足預(yù)期目標(biāo),實(shí)現(xiàn)了電動(dòng)力遠(yuǎn)程遙控農(nóng)田作業(yè)。

表1 測(cè)試結(jié)果
①Y表示信號(hào)收發(fā)成功,小車正確執(zhí)行命令;N表示信號(hào)收發(fā)失敗,小車無動(dòng)作或執(zhí)行錯(cuò)誤命令。②工作效率計(jì)算公式(估算):η=各電動(dòng)力部件總消耗功率/蓄電池組總輸出功率。
5結(jié)論和展望
本文設(shè)計(jì)的控制系統(tǒng)建立在先進(jìn)的電動(dòng)汽車驅(qū)動(dòng)和轉(zhuǎn)向技術(shù)基礎(chǔ)之上,利用智能控制技術(shù)實(shí)現(xiàn)農(nóng)田作業(yè)的遠(yuǎn)程遙控。從測(cè)試數(shù)據(jù)分析來看,該控制系統(tǒng)不僅可滿足噴霧基本作業(yè)功能需求,而且大大提高了能源的利用率和工作效率。本研究為電動(dòng)力在農(nóng)具領(lǐng)域的應(yīng)用提供了探索方向,但是因該控制系統(tǒng)由多個(gè)部件搭建而成,性能存在一定的不穩(wěn)定性,在未來的研制中應(yīng)加進(jìn)開發(fā)一體式總成控制箱。
參考文獻(xiàn):
[1]張鐵民,閆國(guó)琦,溫利利,等.我國(guó)電動(dòng)力農(nóng)業(yè)機(jī)械發(fā)展現(xiàn)狀與趨勢(shì)[J].農(nóng)機(jī)化研究, 2012,34(4):236-240.
[2]籍俊杰,李謙.智能化農(nóng)業(yè)與智能化農(nóng)機(jī)裝備[J].農(nóng)業(yè)技術(shù)與裝備,2012(3):27-31.
[3]閆龍濤.基于XC2268N的純電動(dòng)汽車整車控制器設(shè)計(jì)[D].天津:天津大學(xué),2012.
[4]呂俊磊,劉有源. 汽車驅(qū)動(dòng)橋疲勞試驗(yàn)控制系統(tǒng)研究[J].武漢理工大學(xué)學(xué)報(bào):交通科學(xué)與工程版,2013(1): 201-204.
[5]徐珊珊,戴長(zhǎng)波.汽車驅(qū)動(dòng)橋殼疲勞壽命分析及結(jié)構(gòu)優(yōu)化[J].機(jī)械工程師,2012(8): 52-53.
[6]張步良,馮喜成,劉志英. 拓?fù)鋬?yōu)化技術(shù)在車橋減速器殼開發(fā)中的應(yīng)用[C]//第一屆結(jié)構(gòu)及多學(xué)科優(yōu)化工程應(yīng)用與理論研討會(huì).大連:中國(guó)力學(xué)學(xué)會(huì),2009.
[7]張學(xué)忱,張濤,張慧波. CA1040P90L2輕型貨車驅(qū)動(dòng)橋設(shè)計(jì)[J].工程圖學(xué)學(xué)報(bào),2011(6):5-8.
[8]錢斌,朱順利.汽車驅(qū)動(dòng)橋總成結(jié)構(gòu)設(shè)計(jì)、三維建模與虛擬裝配研究[J].安徽工程科技學(xué)院學(xué)報(bào):自然科學(xué)版,2009(3):21-23,26.
[9]張明宇,段燕. 汽車電動(dòng)助力轉(zhuǎn)向系統(tǒng)[J].湖南農(nóng)機(jī),2013(3):40-41.
[10]王迅.電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)技術(shù)現(xiàn)狀與發(fā)展[J].湖北汽車工業(yè)學(xué)院學(xué)報(bào),2008(3):21-24.
[11]郭翰中.電動(dòng)助力轉(zhuǎn)向系統(tǒng)助力控制策略研究[D].重慶:重慶大學(xué),2011.
[12]姚勝華.電動(dòng)助力轉(zhuǎn)向系統(tǒng)的研制[D].杭州:浙江大學(xué),2001.
[13]Stefan Baldursson. BLDC Motor Modelling and Control - A Matlab Simulink Implementation[D]. Goteborg: Chalmers Tekniska Hogskola, 2005.
[14]翟亮,凌民.基于MatLab的控制系統(tǒng)計(jì)算機(jī)仿真[M].北京:清華大學(xué)出版社,2006.
[15]湯蘊(yùn)璆,羅應(yīng)立,梁艷萍,等.電機(jī)學(xué)[M].北京:機(jī)械工業(yè)出版社,2005.
[16]王兆安,黃俊.電力電子技術(shù)[M].北京:機(jī)械工業(yè)出版社,2009.
Control System Design and Test of Electric Power Spray Machines
Rong Nannan1, Wang Zhen2, Li Jie3, Wang Ranran1, Qi Miaomiao1
(1.Shandong Agricultural University, College of Mechanical and Electronic Engineering, Tai’an 271018, China; 2. Shandong Provincial Key Laboratory of Horticultural Machineries and Equipments, Tai’an 271018, China; 3.State Grid Taian Power Supply Company, Tai’an 271018, China)
Abstract:For the development of modern electric power of agricultural machinery automation status of immature, to make up for the insufficient of electric sprayer in remote intelligent control, designed a self-propelled electric power sprayer control system. Through needs analysis and calculation of the components, developed electric power output device and remote control systems, achieved coordination of the various components and remote control spray operations. Machine power source is 60V lead-acid batteries in series group, form the control system work trial, we can know the whole electric power transmission efficiency is 88.8%, the remote control signal receiving and processing a success rate of 99%; a high-powered machine utilization, life time of 2.98h.
Key words:spray machines; electric power; control system
中圖分類號(hào):S491
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1003-188X(2016)12-0254-06
作者簡(jiǎn)介:榮喃喃(1990-),女,山東濟(jì)寧人,碩士研究生,(E-mail)xinxinxiangrong05@163.com。通訊作者:王冉冉(1979-),男,山東淄博人,副教授,碩士生導(dǎo)師,(E-mail)wranran@163.com。
基金項(xiàng)目:山東省青少年教育科學(xué)規(guī)劃項(xiàng)目(15BSH073)
收稿日期:2015-12-03
