基于多跳無線局域網絡的多聯合收獲機速度協同控制
2016-03-23 03:20:11余良俊席東河汪小志
農機化研究 2016年3期
關鍵詞:機械效率
余良俊,席東河,汪小志
(1.武漢工程科技學院,武漢 430200;2.中國地質大學 機械與電子信息學院,武漢 430074;3.河南工業職業技術學院,河南 南陽 473000;4.武漢理工大學 物流工程學院,武漢 430063)
?
基于多跳無線局域網絡的多聯合收獲機速度協同控制
余良俊1,2,席東河3,汪小志4
(1.武漢工程科技學院,武漢430200;2.中國地質大學 機械與電子信息學院,武漢430074;3.河南工業職業技術學院,河南 南陽473000;4.武漢理工大學 物流工程學院,武漢430063)
摘要:隨著現代化農業科學技術的進步,大面積協同作業逐漸開始應用在機械自動化生產過程中,為了提高聯合收獲機械裝置作業的生產效率,提出了一種多機協同控制的多跳無線局域網絡,實現了多機大面積協同化作業控制。利用無線多跳網絡,基于地形和地質條件,統一多機作業的速度,根據脫粒滾筒的轉速和籽粒的損失率,對協同速度進行優化。為了驗證設計的多跳無線局域網多速度協同控制的有效性,對多聯合收割機的速度優化效果和籽粒的損失率進行了實驗測試。由測試結果可以看出:采用多聯合收割機前進速度協同控制后,其機械效率和籽粒的損失率都得到了明顯的改善,從而驗證了速度協同控制方法的可靠性,為大面積農作物收獲機械自動化作業通信技術的研究提供了一種新的無線多跳網絡優化方法。
關鍵詞:協同控制;多跳網絡;脫粒滾筒;籽粒損失;機械效率
0引言
性能良好的聯合收獲機應該在不超過額定喂入量和允許籽粒損失量的前提下,在一定的地形和地質條件下具有最大的前進速度。聯合收獲機前進速度自動控制的目的是保持均勻合理的喂入量,使脫粒滾筒和螺旋輸送器等主要工作部件的負荷穩定。隨著大面積作物種植技術的推廣,單一的聯合收割已經不能滿足大型機械化生產的需要,需要使用多臺機械聯合控制的方法,通過并行作業的方式,才能完成作物的聯合收割任務。
為了滿足多臺聯合收割機的聯合控制,首先要控制單臺收獲機獨立完成任務時的最優速度和最佳路徑,然后將速度和路徑控制指令傳輸給其它聯合收獲機。但是,信息的傳遞需要通過網絡通信,在沒有基礎通信設施的情況下,在距離較遠的兩臺聯合收割機直接可以使用多跳網絡通信。多跳無線網絡不需要基礎設施、高度自治,因此其無法或不方便建立基礎設施及只需臨時性組網通信的應用場景,并且多跳無線網絡仍將以4G網絡不可或缺的組成部分而占據重要地位。多跳網絡通信改變了傳統依靠基站的通信方式,使多臺聯合收割機直接可以實現信息共享,便于協同控制,提高了機械控制的效率及大面積作業的機械化程度。
1多聯合收獲機速度協同控制原理
聯合收獲機速度的協同控制主要是基于多跳局域網絡的聯合通信功能。喂入量是聯合收獲機械的重要設計參數和性能參數,在收割機速度自動控制系統中,可以使用傳感器監測滾筒的轉速來測量喂入量;而地形和地質條件可以通過聯合收獲機的阻力負荷反饋調節來實現。聯合收獲機速度協同控制的基本框架設計如圖1所示。
工作時,首先通過傳感器采集地形地質條件、收獲機滾筒轉速、前進阻力的相關信息,然后將信號進行處理,發出調速指令,利用無線多跳網絡對多聯合收獲機協同控制。無基礎設施的無線網絡沒有網絡基礎設施和中心控制的網絡結構,終端節點除了作為通信的終端,還具備路由轉發的功能。其基本結構示意圖如圖2所示。
多跳網絡相比單跳無線網絡具有明顯的優勢,并可以使用 IEEE 802.11 DCF 無線鏈路對網絡進行優化,優化模型如圖3所示。等待狀態同一時刻共享信道且鄰近的無線鏈路中,只有一條鏈路能占用信道進行傳輸,而其余所有競爭信道的鏈路只能進入等待狀態,并從其競爭窗口中隨機選擇一個數值設置其二進制退避計數器。
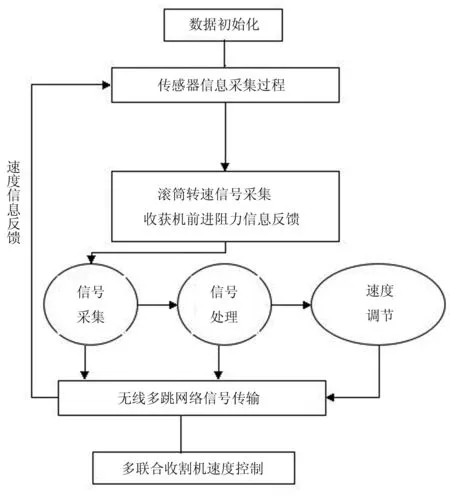
圖1 多聯合收獲機速度協同控制示意圖
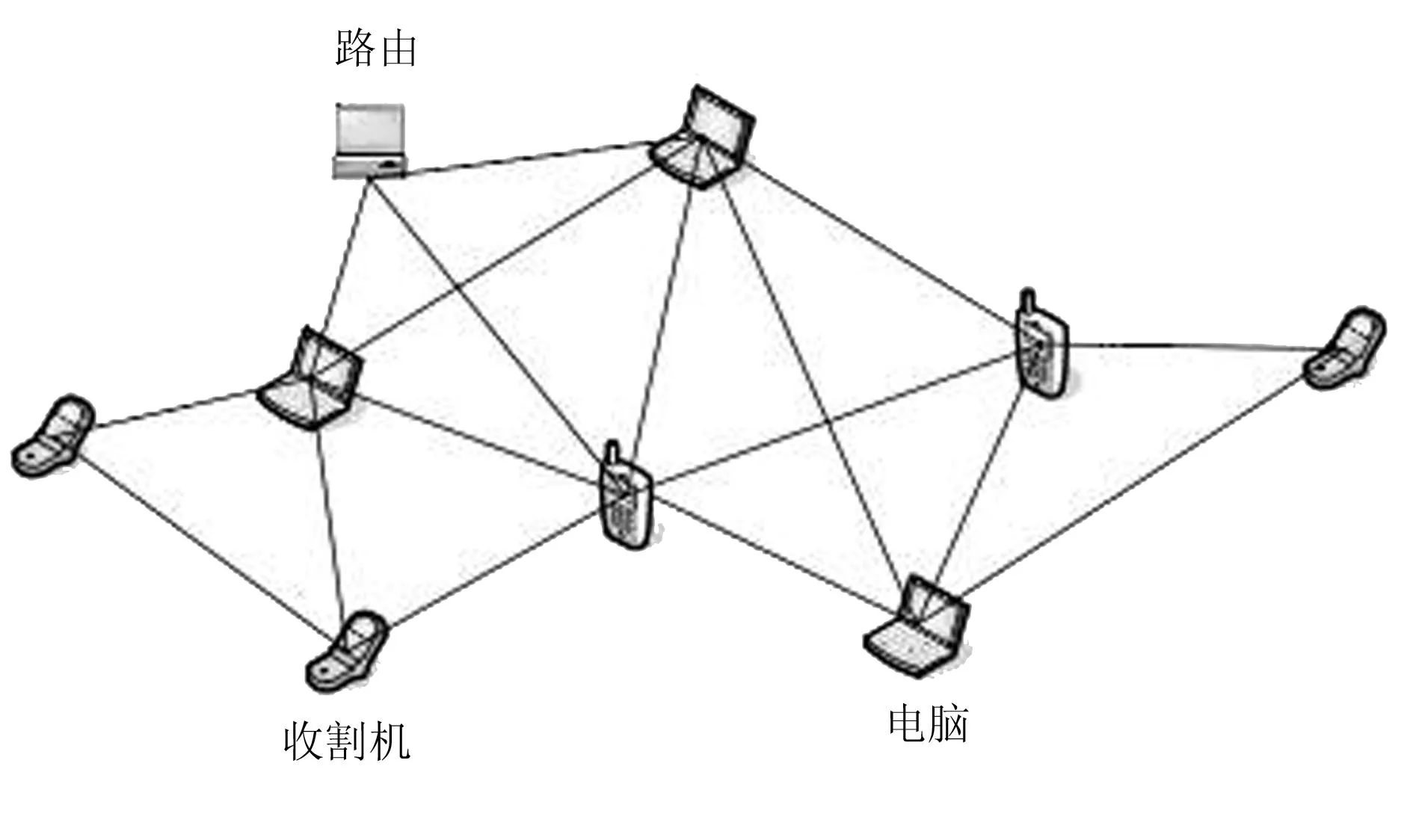
圖2 多跳無線網絡結構
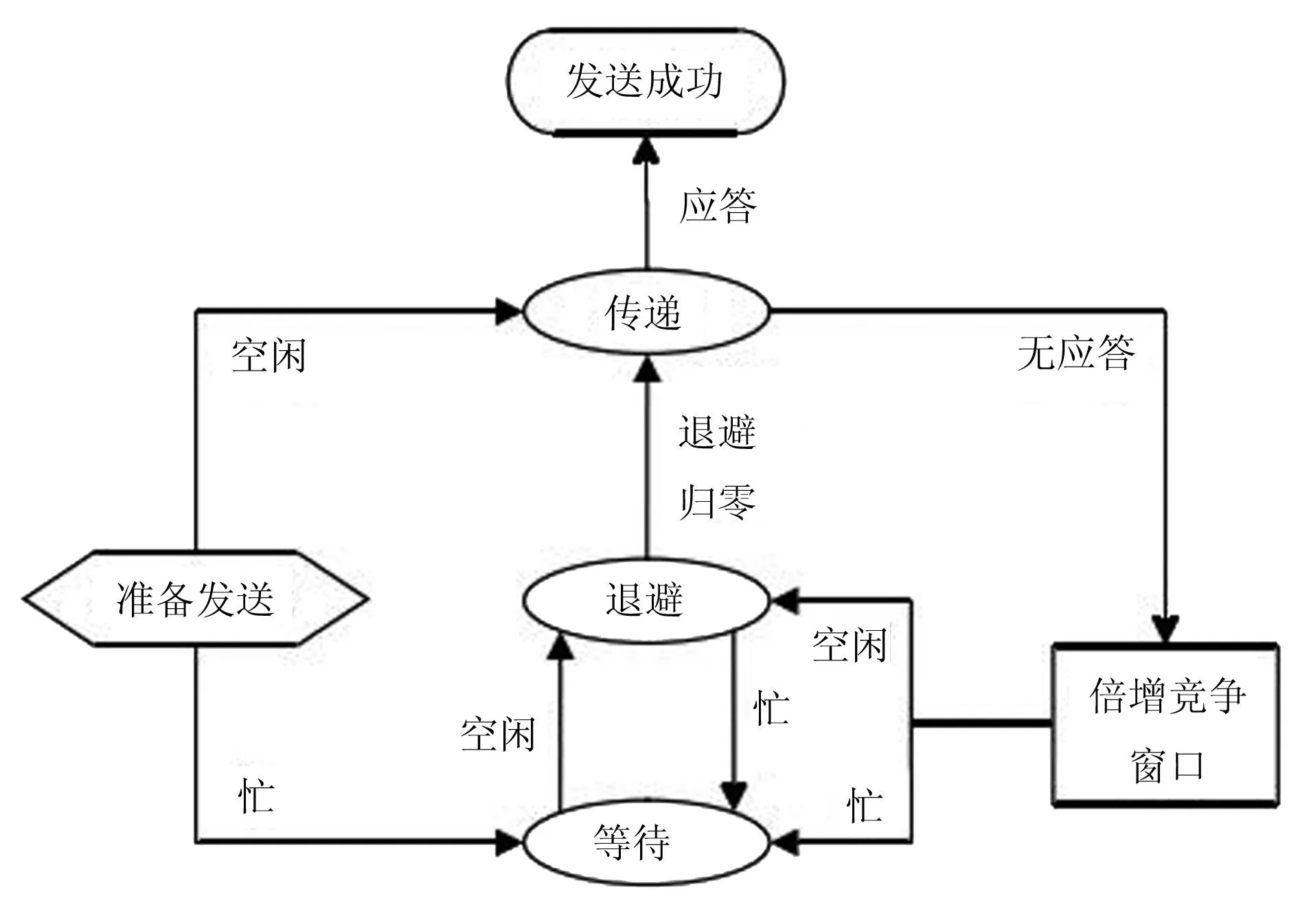
圖3 IEEE 802.11 DCF 無線鏈路傳輸模型
2速度協同控制無線多跳局域網設計
為了實現聯合收獲機多機協同控制,需要首先控制一臺收獲機的速度,然后根據電機轉速來實現多聯合收割機的互聯通信。單臺聯合收獲機速度控制的基本原理如圖4所示。

1.傳感器滑板 2.拉絲 3.調節手桿 4.分配閥
控制系統中應用的即為機械式喂入量傳感器,傳感器通過采集信息,獲得轉速相關的脈沖信號,再通過如圖5所示的電路對信號進行處理。
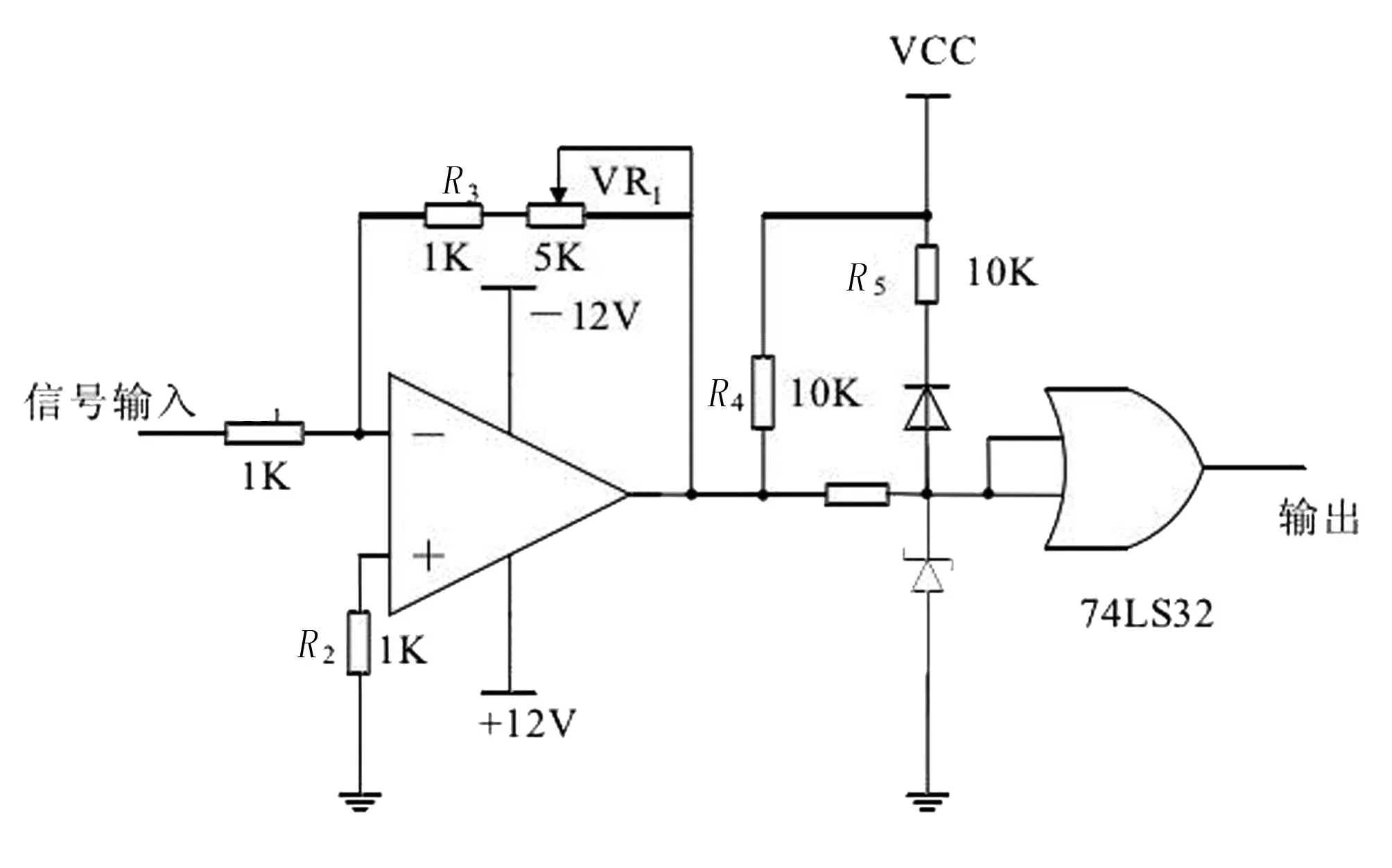
圖5 速度信號處理電路
圖5中,霍爾開關輸出的脈沖信號經過放大后,被5V穩壓管穩壓,再經74LS32整形后輸出;單片機從 T0 引腳接受脈沖信號后進行計算,得出轉速,單片機通過如下流程發出速度控制指令,如圖6所示。

圖6 速度控制指令
為了滿足多臺聯合收割機的聯合控制,需要將速度控制指令傳輸給其它聯合收獲機,這就需要引入多跳無線局域網絡。多跳無線網絡沒有網絡基礎設施和中心控制的網絡結構,終端節點除了作為通信的終端,同時還具備路由轉發的功能,其時延特性的模型為
(1)
其中,St為最大退避階段,N為鏈路的期望傳輸次數,φ是退避時隙,通常為幾十微秒。函數E從無線鏈路的競爭窗口CWj中隨機地選擇第j次傳輸嘗試的退避計數值,CW0是鏈路的初始競爭窗口。在多速度協同控制時,需要盡量地規避時延區,基于此,本次研究引入了RTS/CTS訪問模式,其結構原理如圖7所示。

DIFS: Distributed InterFrame Space CW: Contention Window
各聯合收獲機的通信方式使用RTS/CTS訪問模式,該模式在發送節點與接收節點的DATA/ACK握手之前增加了一個RTS/CTS 握手過程;發送節點和接收節點通過RTS/CTS握手過程預約信道,同時通知其它共享信道的節點回避,實現了聯合協同控制。
3速度協同控制無線多跳網絡測試
為了驗證本文設計的聯合收獲機速度協同控制無線多跳網絡的有效性,本研究對多速度協同控制速度進行了測試,并對其優化路徑進行了模擬,最后對其生產效率進行測試。
圖8為聯合收獲機協同作業的示意圖。使用速度協同控制后,根據地形和地質條件,結合收獲機喂入量和籽粒的損失率,可以對速度和路徑進行優化,選取其中3臺做速度隨時間變化曲線,得到了如圖9所示的結果。

圖8 多收獲機聯合作業示意圖
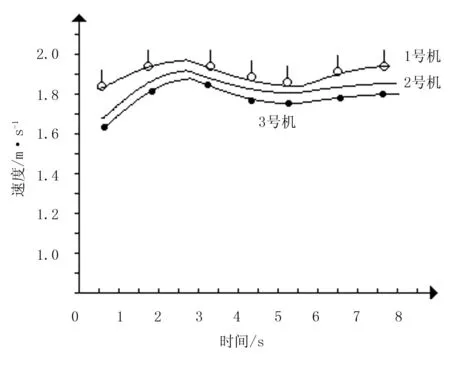
圖9 收獲機速度協同控制
由圖9可以看出:隨機選取的3臺收獲機速度隨時間的變化曲線基本一致,實現了多機的聯合控制,其協同路徑如圖10所示。
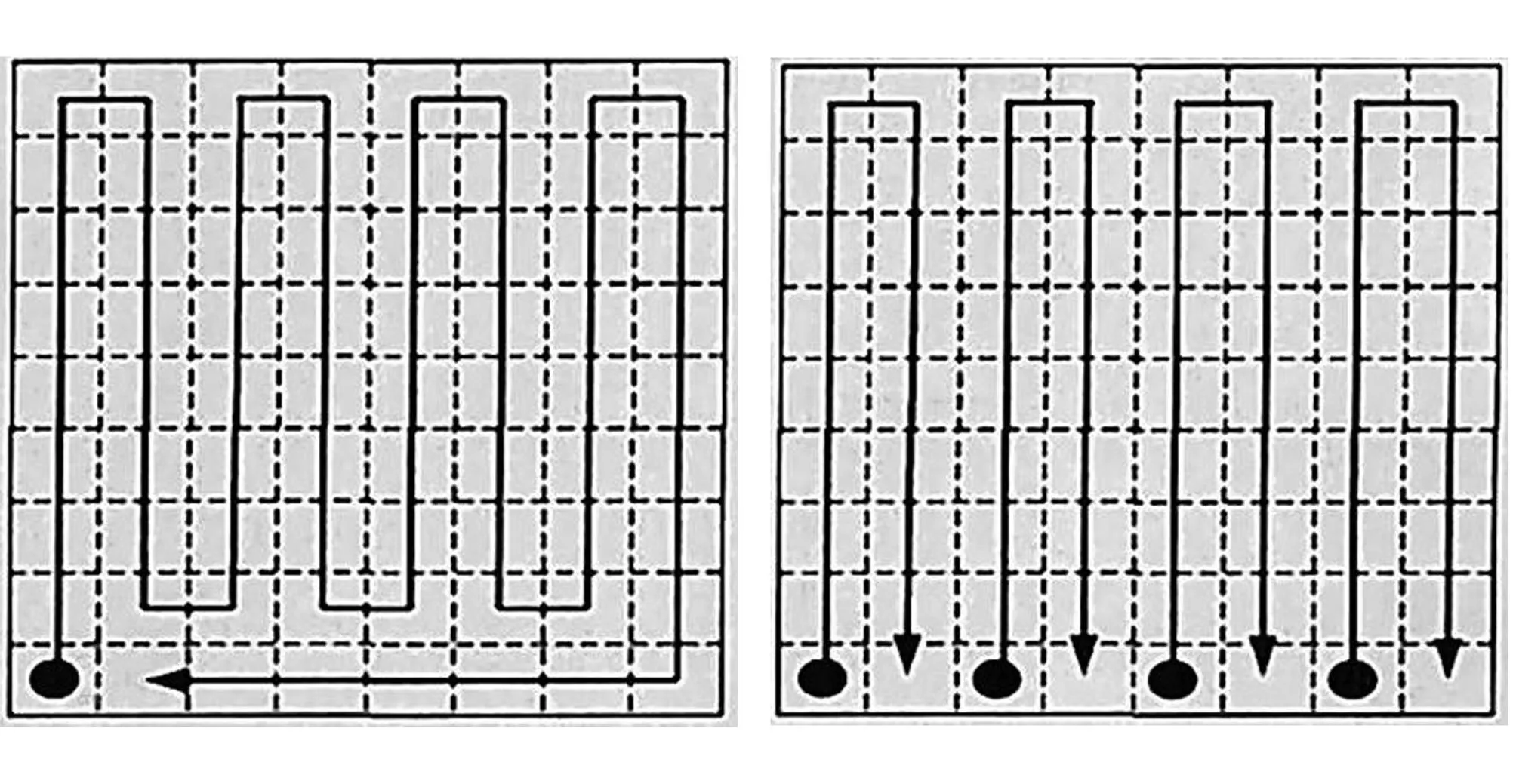
圖10 路徑優化示意圖
由圖10可以看出:在多跳局域網絡的控制下,收獲機的路徑由單任務轉換為并行任務模式,實現了聯合協同控制。
表1和表2分別表示在速度協同控制和非協同控制下機械效率和生產效果對比。由表1、表2可以看出:使用多聯合收獲機速度協同控制后,大大提高了機械作業的生產效率,縮短了作業時間。
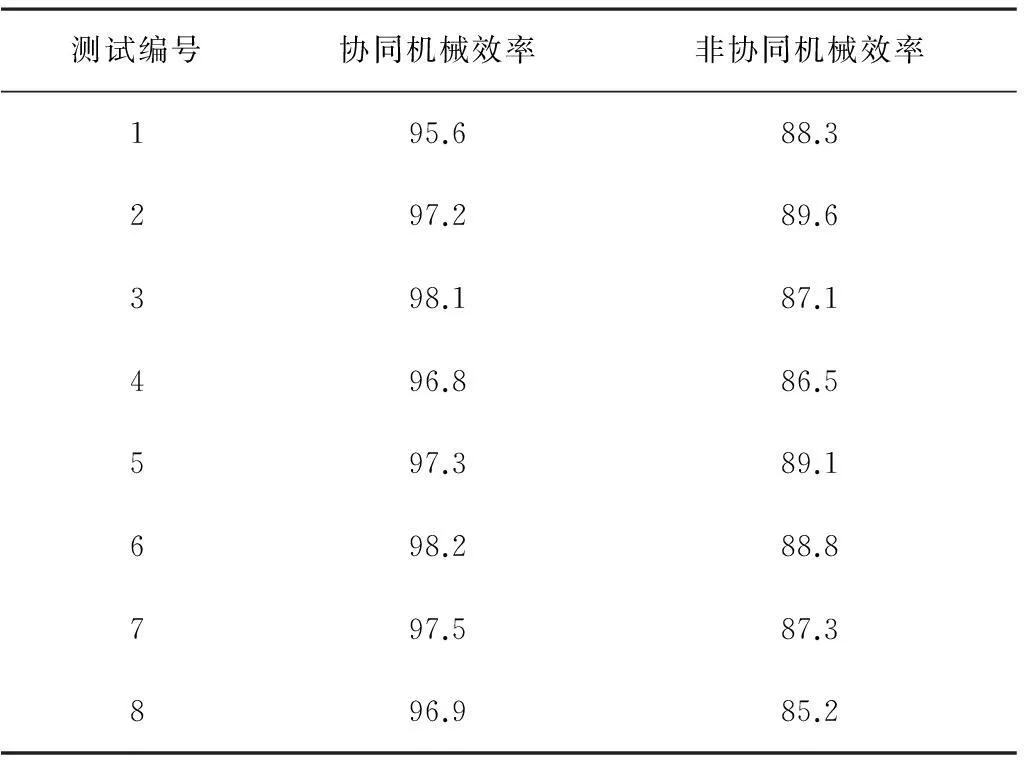
表1 聯合收獲機協同控制機械效率
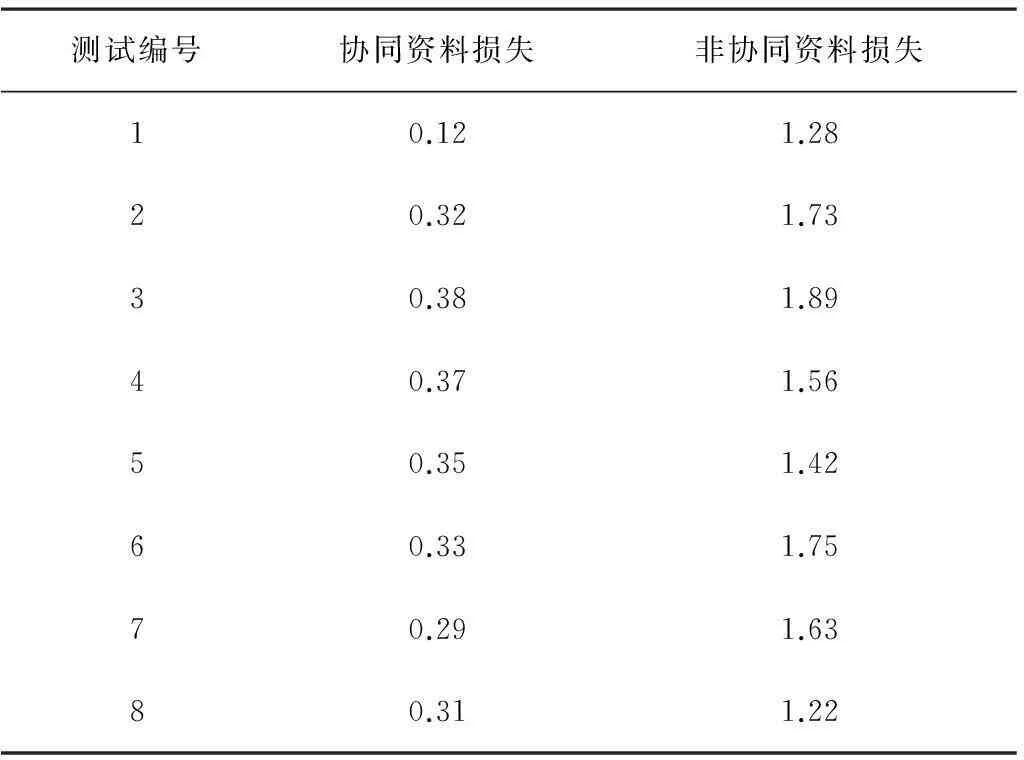
表2 聯合收獲機協同控制籽粒損失對比
為了驗證聯合收獲機速度協同控制對籽粒損失的程度,對比了使用和不使用速度協同控制下的籽粒損失率。由對比結果可以看出:使用速度協同控制可以有效地降低籽粒的損失率,提高作業精度。
4結論
1)為了提高大面積農作物收割的機械效率、降低作物聯合收獲過程中籽粒的損失,提出了一種新的多聯合收割機協同控制方法。該方法采用無線多跳網絡對速度指令進行傳輸,完成多收獲機的同步操控。
2)為了驗證多聯合收獲機協同控制的有效性和可靠性,對多跳網絡的協同控制進行了測試,得到了使用和不使用協同控制工況下聯合收割機速度控制、機械效率和籽粒損失的對比結果。由測試結果可以看出:使用多聯合收獲機協同控制方法可以大大提高機械作業效率,降低籽粒的損失。
3)該方法在現代化大面積農業生產過程中投放使用,可以有效地提高作物的收獲速度和精度,且該技術在耕地、施肥、播種和灌溉技術中也可以推廣使用,具有很好的適應性。
參考文獻:
[1]秦國成,秦貴,張艷紅.設施農業裝備技術現狀及發展趨勢[J].農機化研究,2012,34(3):81-82.
[2]張寧,廖慶喜.我國小粒徑種子播種技術與裝備的應用與研究進展[J].中國農機化,2012(1):93-96,103.
[3]郝金魁,張西群,齊新,等.工廠化育苗技術現狀與發展對策[J].江蘇農業科學,2012,40(1):349-351.
[4]羅昕,胡斌,黃力爍.氣吸式穴盤育苗精量播種機的設計與試驗[J].農機化研究,2010,32(11):130-132,140.
[5]李耀明,梁振偉,趙湛,等.聯合收獲機谷物損失實時監測系統研究[J].農業機械學報,2011,42(Z1):99-102.
[6]徐立章,李耀明,李洪昌,等.縱軸流脫粒分離-清選試驗臺設計[J].農業機械學報,2009,40(12):76-79.
[7]唐忠,李耀明,趙湛,等.夾帶損失傳感器不同安裝位置對籽粒檢測精度的影響[J].農業工程學報,2012,28(10):46-52.
[8]解福祥,區穎剛,劉慶庭.甘蔗收獲機組合式扶起裝置設計與試驗[J].農業機械學報,2011,42(2):94-97.
[9]賴曉,李尚平,秦志文,等.新型甘蔗收割裝置的仿真分析與試驗研究[J].農機化研究,2011,33(2): 102-105.
[10]王健康,吳明亮,任述光,等.往復式切割器傳動機構運動動力學分析[J].中國農學通報, 2011, 27(1):90-194.
[11]李婉,李尚平,劉東美.小型整稈甘蔗收獲機械喂入機構仿真分析與試驗研究[J].農機化研究,2010, 32(7):152-154.
[12]Takuyuki Y, Katsuaki S, Koki I, et al. Application of a Sugarcane Harvester for Harvesting of Willow Trees Aimed at Short Rotation Forestry: an Experimental Case Study in Japan[J]. Croatian Journal of Forest Engineering, 2012, 33(1): 5-14.
[13]宋春華,區穎剛,劉慶庭,等.兩段式螺旋扶起機構理論的研究[J].農機化研究,2010,32(11):34-36.
[14]杜現軍,李玉道,顏世濤,等.棉稈力學性能試驗[J]. 農業機械學報,2011,42(4):87-91.
[15]宋占華,肖靜,張世福,等.曲柄連桿式棉稈切割試驗臺設計與試驗[J].農業機械學報,2011,42(11):162-167.
[16]王鋒德,燕曉輝,董世平,等.我國棉花秸稈收獲裝備及收儲運技術路線分析[J].農機化研究,2009,31(12):217-220.
[17]李耀明,秦同娣,陳進,等.玉米莖稈往復切割力學特性試驗與分析[J].農業工程學報,2011,27(1):160-164.
[18]介戰.我國谷物隨機損失率測試展望[J].農機化研究,2009,31(7):5-9.
[19]周利明,張小超,劉陽春,等.聯合收獲機谷物損失測量 PVDF 陣列傳感器設計與試驗[J].農業機械學報,2010,41(6):167-171.
[20]李俊峰,介戰.聯合收割機谷物損失測試研究探討[J].農機化研究,2007(12):248-250.
[21]梁振偉,李耀明,趙湛,等.切縱流聯合收獲機夾帶損失監測方法[J].農業工程學報,,2012,28(Z2):179-183.
Speed Coordination Control of Multi Joint Harvest Machine Based on Multi Hop Wireless LAN
Yu Liangjun1,2,Xi Donghe3,Wang Xiaozhi4
(1.Wuhan University of Engineering Science,Wuhan 430200, China; 2.Faculty of Mechanical & Electronic Information, China University of Geosciences,Wuhan 430074, China; 3.Henan Polytechnic Institute, Nanyang 473000, China; 4.School of Logistics Engineering, Wuhan University of Technology,Wuhan 430063, China)
Abstract:Along with the development of modern agricultural science and technology progress,the application in mechanical automation production process appears in large collaboration areas. In order to improve the production efficiency in the operation of combine harvester device, it presents a multi aircraft cooperative control of multi hop wireless local area network,realizes the multi machine cooperative control of work in large areas.It uses wireless multi hop networks based on jointed multi machine operation speed to control topographic and geological conditions. According to the threshing roller speed and the grain loss rate, it optimizes the speed of coordination. In order to verify the validity of multi speed coordination control based on the multi hop wireless LAN design.it tests the loss optimization effect and the grain velocity on combine harvester rate by using multi combined harvester forward speed coordination control.The mechanical efficiency and the grain loss rate have been significantly improved, which verified the reliability of the speed control method of collaborative. The result provides a new kind of multi hop wireless network optimization method for the study of automation communication technology in the large area crop harvesting machinery.
Key words:collaborative control; multi hop network; threshing cylinder; grain loss; mechanical efficiency
文章編號:1003-188X(2016)03-0222-05
中圖分類號:S225;TN925.93
文獻標識碼:A
作者簡介:余良俊(1984-),女,武漢人,講師,博士研究生。通訊作者:汪小志(1981-),女,武漢人,講師,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金項目:湖北省自然科學基金項目(2014CFC1079);湖北省自然科學基金計劃面上項目(2013CFB418)
收稿日期:2015-02-14
猜你喜歡
初中生學習指導·提升版(2025年7期)2025-08-03 00:00:00
初中生學習指導·中考版(2023年6期)2023-06-10 16:28:59
中學生數理化·八年級物理人教版(2016年6期)2016-08-27 22:02:26
中學生數理化·八年級物理人教版(2016年6期)2016-08-27 14:41:45
初中生學習·高(2016年7期)2016-05-14 18:20:23
初中生學習·高(2016年8期)2016-05-14 06:22:21
中學生數理化·八年級物理人教版(2015年6期)2015-08-30 08:17:21
亞太教育(2015年5期)2015-05-13 18:05:29
學苑創造·C版(2015年4期)2015-05-06 04:04:35
中學生數理化·八年級物理人教版(2013年6期)2013-04-29 14:09:18