基于專利地圖的農業機器人技術發展態勢研究
2016-03-23 06:10:04林志堅應向偉仇秋飛吳巧玲趙云飛吳葉青
農機化研究 2016年9期
諶 凱,林志堅,應向偉,仇秋飛,吳巧玲,趙云飛,吳葉青
(浙江省科技信息研究院,杭州 310006)
?
基于專利地圖的農業機器人技術發展態勢研究
諶凱,林志堅,應向偉,仇秋飛,吳巧玲,趙云飛,吳葉青
(浙江省科技信息研究院,杭州310006)
摘要:農業機器人是農機產業的重要潛在發展方向,可提升農機企業核心競爭力、驅動科技創新及促進農業生產效率提升。為此,針對農業機器人技術繪制專利地圖,從發展趨勢、重點技術領域、地域分布、競爭機構及高引專利等方面開展態勢研究,以為相關政府部門、企業和高校院所進一步發展農業機器人產業和技術提供情報支撐。研究結果表明:農業機器人技術真正的發展階段出現在1993年以后,總體呈現出快速增長,而且這一趨勢延續至今。機械手的末端執行器、自動導航及目標探測與定位是該領域的重點研發技術,而收獲機器人、田間作業機器人、植保機器人是該領域的重點研發種類。我國近年來對于農業機器人技術的研發熱情高漲,申請有大量相關專利,但專利質量相對美國和日本較低,核心專利缺失,技術水平還有待進一步提高。此外,還從政府、企業和產業園區3個層面提出了我國進一步發展農業機器人技術的對策建議。
關鍵詞:農業機器人;專利地圖;競爭情報
0引言
農業機器人以完成農業生產任務為目的,隸屬于特種機器人范疇,是一種兼有四肢行動、信息感知能力及可重復編程功能的柔性自動化或半自動化智能化農業裝備,集傳感技術、監測技術、通訊技術及精密機械技術等多種前沿科學技術于一身。隨著農業生產的日趨工業化、規模化和精準化,農業機器人已經成為農業工程領域的科研重點之一,其在育苗、移苗、嫁接和農產品收獲等方面均得到了初步應用。農業機器人在提高農業生產力、改變農業生產模式、解決勞動力不足,以及實現農業的規模化、多樣化和精準化等方面顯示出了極大的優越性[1-10]。隨著研究的深入和市場需求的不斷增加,農業機器人及農業智能裝備將成為提升相關企業核心競爭力、驅動科技創新和促進農業生產效率提升的重要發展方向。
為此,本文基于專利地圖,開展農業機器人技術發展態勢研究,得出發展趨勢、重點技術領域、地域分布、競爭機構及高引專利等方面的競爭情報,為相關政府部門、企業和高校院所進一步發展農業機器人產業和技術提供情報支撐。
本研究使用了德溫特專利和國家知識產權局中國專利數據庫,結合關鍵詞、IPC分類、德溫特手工代碼的方法進行專利檢索和數據采集,共得到與農業機器人相關的德溫特專利1 779項專利族,3 777件專利;中國專利715件,其中中國申請人申請的中國專利為656件(檢索時間范圍為1962年至2015年5月)。專利分析工具上,綜合應用了Thomson公司的TDA、Thomson Innovation以及國家知識產權局出版社專利分析軟件等工具。對農業機器人領域的發展規模、發展趨勢、技術領域、地域分布和競爭機構等方面繪制了專利地圖。
1發展趨勢
從農業機器人技術年度專利走勢來看(見圖1),農業機器人技術發展大致可分為3個階段:第1階段為技術孕育階段(1975-1992年)。最早的農業機器人技術專利申請出現在1975年,一直到1992年,每年專利申請量都不足20項,說明農業機器人技術處于孕育階段。第2階段為起步發展階段(1993-2002年)。在20年的時間里,農業機器人技術每年的專利申請量保持在10~55項左右。第3階段為高速發展階段(2003年至今)。2003年開始,農業機器人技術每年的專利申請量出現高速增長,從2003年的38項增長到2012年的220項。
由于專利申請中存在的18個月公開期,使得大量專利還處于未公開狀態,因此2013年和2014年的數據在這里不做分析。
縱觀農業機器人技術專利申請數量,農業機器人技術真正的發展階段出現在1993年以后,總體呈現出快速增長,而且這一趨勢延續至今,說明國際上技術研發熱情很高,短期發展前景毋庸置疑。

圖1 年度專利走勢圖
2重點技術領域
2.1 重點研發技術
DII手工代碼和國際專利分類號(IPC)包含了專利的技術信息,通過對農業機器人相關專利進行基于DII手工代碼和IPC的統計分析,可以了解農業機器人技術的研發重點。
表1和表2分別列出了農業機器人技術的TOP20的手工代碼和IPC代碼,從中均可看出機械手(包括機械手的末端執行器)及其控制、自動導航及目標探測與定位是該技術領域的研發重點,同時也是關鍵技術。

表1 農業機器人技術專利申請的TOP 20手工代碼

續表1

表2 農業機器人技術專利申請的TOP 20 IPC代碼
對主要技術領域進行年度走勢分析,可以發現農業機器人技術領域各項關鍵技術的年度發展情況。如圖2所示,農業機器人的自動導航技術于1981年開始有第1份相關申請(由加拿大DIFFRACTO公司申請),而專利申請量從1998年開始快速增長,并于2010年達到小高峰。而農業機器人的末端執行器技術于1982年開始有第1份相關申請(由匈牙利MEZOGAZDASAGI ELELM公司申請,關于水果采摘機器人的末端執行器),申請量于1994年達到一個小高峰,達到17項(其中10項由日本久保田申請,5項由日本洋馬申請);隨后專利量出現起伏,于2011年開始再次快速增長,2012年申請量達27項,2013年申請量(不完全數據)達37項,在2011年絕大多數相關專利由中國高校申請。農業機器人的目標探測與定位技術于1980年開始有第1份相關申請(由法國ENSERB ECOLE NAT公司申請),而直到2002年,每年的專利申請量不足10項;從2003年開始,專利申請量出現快速增長,從2003年的13項增長到2012年的53項。
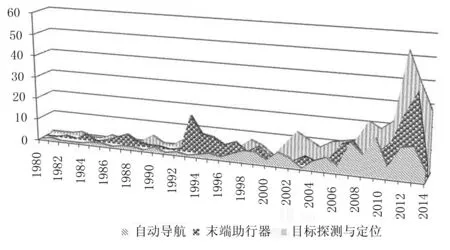
圖2 關鍵技術專利族年度分布
2.2 重點研發種類
如表3所示:農業機器人相關專利申請中,最熱門的依次為收獲機器人(包括收獲、采摘和割草)、田間作業機器人、植保機器人、分級分選機器人和噴灌機器人,所占比例分別為40.7%、27.0%、12.1%、4.6%和3.5%。

表3 各類農業機器人專利族分布
圖3展示了各類農業機器人上各種關鍵技術的研發情況。從圖3中可以看出:目標探測與定位、末端執行器和自動導航這3種關鍵技術在收獲機器人上的研發最為熱門,其次是田間作業機器人;而對于植保機器人,3種關鍵技術中,目標探測與定位技術的研發最為熱門,對于分級分選機器人,則是末端執行器的研發最為熱門。

圖3 各類農業機器人中關鍵技術的專利族分布
3專利區域分布
依據農業機器人技術1 779項德溫特專利族分布來看,全球農業機器人技術專利主要來源國為中國、日本、美國、韓國和德國等。本節主要從全球專利分布、主要國家專利申請量年度分布、主要國家關鍵技術布局、主要國家全球專利布局等角度對全球農業機器人技術的區域競爭格局進行分析和研究。
3.1 國際技術研發格局
所謂專利優先權是指申請人在一個國家第1次提出申請后,可以在專利法規定的期限內就同一主題向其他國家申請保護,這一申請在某些方面被視為是在第1次申請的申請日提出的。通常而言,發明人會在本國就其發明創造第1次提出專利申請,所以優先權專利申請的地域分布可以反映國家的技術實力。
如圖4所示,從農業機器人1 779項優先權專利的區域分布看,中國的專利申請量為656項,處于絕對的領先地位,占據產業技術所有優先權專利的37%;日本排名第2,占據產業技術所有優先權專利的18%,排名3~5位的分別是美國、韓國和德國;排名前5位的國家占了所有優先權專利的76%。
圖5是TOP5優先權國的專利申請隨年代的分布圖。從圖5中可以看出:日本起步相對較晚,直到1982年才出現第1份相關專利申請;但是,在該領域發展較快,申請量在1994 -1996年達到一個小高峰,專利申請量分別為39、45和29項。1996年后,雖然專利申請量出現回落,但是每年也保持5~20項的專利申請。美國在該領域則是起步最早,于1975年出現第1份專利申請,相關專利申請量從1999年開始出現快速增長,每年保持10~25項的專利申請。我國起步較晚,直到1990年才有第1份相關專利申請;但從2005年開始,在該領域的專利申請量開始出現高速增長,從2005年的8項猛增至2012年的151項和2013年的151項(2013年的數據由于專利公開時間的原因還不是完全數據),遠遠超出同時期其他國家關于農業機器人的專利申請,預計短期內還會繼續增長,這說明我國近年來對于農業機器人技術的研發熱情高漲,正在積極進行技術研發和儲備,為產業化作準備。

圖4 優先權專利國際區域分布

圖5 TOP 5優先權國專利族年度分布
由圖6 TOP5優先權國技術領域布局圖看,中國在農業機器人的目標探測與定位和末端執行器技術領域的專利申請量處于絕對的領先地位;日本緊隨其后,在末端執行器技術領域具有較多專利申請;美國雖然專利申請量不多,但是在農業機器人的自動導航技術領域具有較大優勢。

圖6 TOP5優先權國技術領域布局圖
如圖7所示:TOP5優先權國對不同農業機器人的研發投入也略有不同。中國、美國、韓國和德國均最為關注收獲機器人,其次為田間作業機器人、植保機器人等;日本則是最為關注田間作業機器人,其次是收獲機器人、植保機器人等。
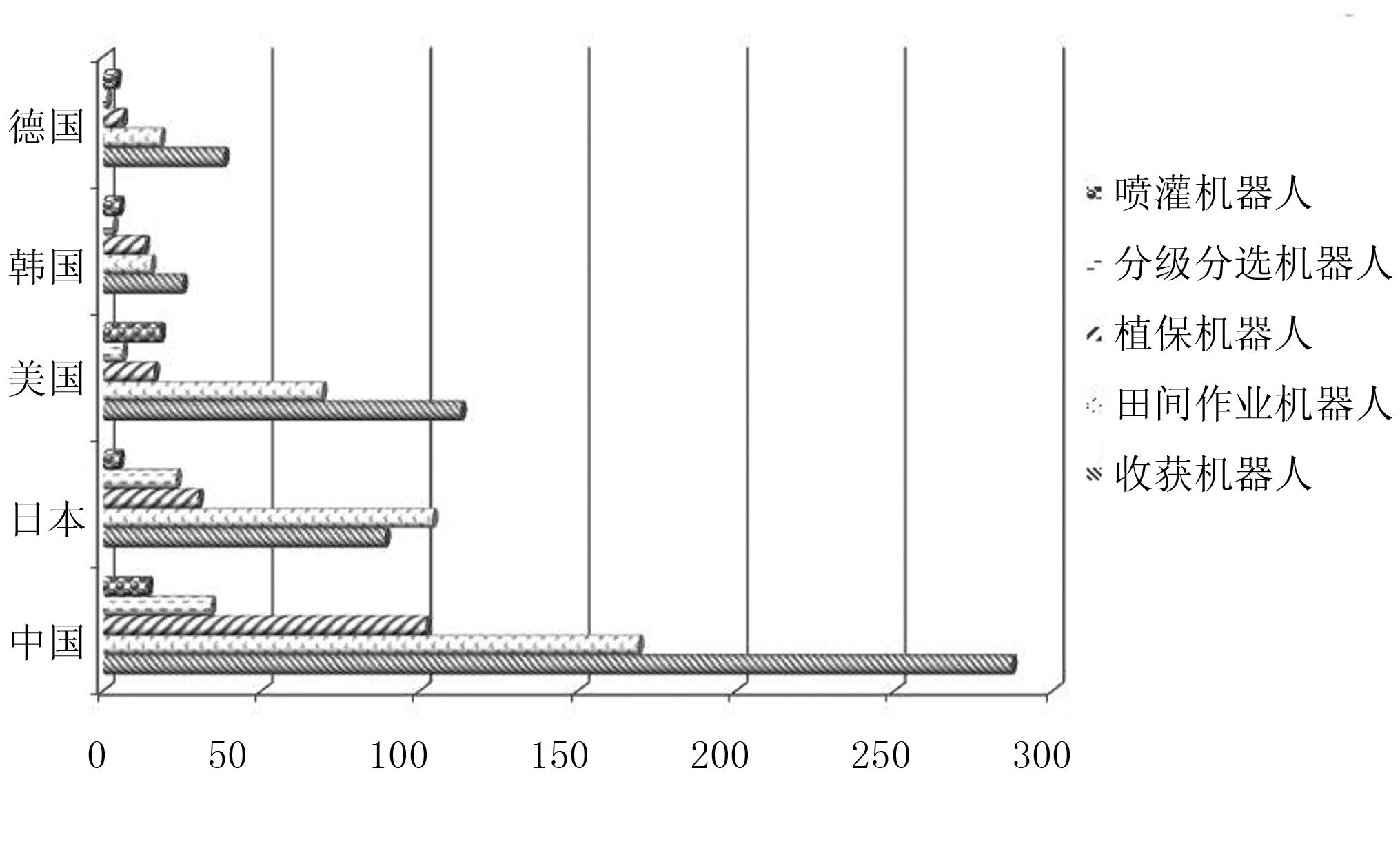
圖7 TOP5優先權國農業機器人的布局圖
3.2 主要專利國家全球專利布局
日本和美國作為農業機器人技術研發的強國,對世界市場的爭奪也非常激烈,因此除了對本國進行專利保護外,為了在國外生產、銷售農業機器人,必須在國外地區申請相關專利以求獲得知識產權保護,同時該國同族專利的申請也可以反映出其市場戰略。
由圖8中可以了解到,日本除在本國申請外,同時重點在美國、歐洲、德國和中國等國家和地區進行布局,表明日本更為重視這些國家和地區的市場;美國雖然專利申請量少于日本,但是在本國外的布局力度強于日本,美國在歐洲、澳大利亞、德國、中國和日本部署有大量專利,這也說明美國雖然相關專利申請量不大,但是在農業機器人領域具有很強的技術實力。

圖8 主要專利國家全球專利布局
我國作為農業機器人領域專利申請量排名第一的大國,主要針對本國市場,只在國外零星地申請了幾件專利,如在美國申請了2件專利,在歐洲申請了2件專利,在德國申請了1件專利,另外申請了7項PCT專利。這說明國內創新主體的專利保護意識還不夠強,而且值得向國外申請專利的真正有價值的技術少之又少,側面印證了我國在農業機器人領域核心技術的缺失。
3.3 主要國家專利質量分析
表4綜合反映了TOP5優先權國家的專利質量。中國雖然優先權專利數量遠多于日本和美國,但無論是總被引次數、平均被引次數、專利被引率還是PCT專利數量及美國專利數量等,都遠低于美國。這說明我國雖然相關專利數量多,但是專利質量較低,研發水平還有待進一步提高。相比之下,美國則是專利質量最高的國家。

表4 主要國家專利指標
3.4 國內技術分布格局
如圖9所示:中國專利申請的國外申請人主要來自美國、WO、日本、歐洲等, 這與這些國家和地區的農
業機器人技術研發能力相吻合。可見,農業機器人技術傳統強國在搶占中國這一新興市場時,均非常重視借助專利布局提高競爭力,實現市場和技術的雙重壟斷。

圖9 中國專利中國外申請人的主要來源國
如圖10所示:在國內,農業機器人技術方面,江蘇、浙江、山東、北京和陜西等排在前列。江蘇研發主力是江蘇大學和江南大學等;浙江研發主力是浙江理工大學、浙江工業大學和浙江大學等。

圖10 中國專利中國內申請人的地域分布
如圖11所示:江蘇在目標探測與定位技術領域和末端執行器存在較大優勢,浙江則是在自動導航技術領域占據優勢。
如圖12所示:國內農業機器人種類方面,江蘇比較關注收獲機器人和分級分選機器人的研發;浙江更為關注田間作業機器人的研發;山東則更為關注植保機器人的研發。

圖11 主要省市技術領域布局圖

圖12 主要省市農業機器人種類布局圖
4專利競爭機構
本節主要從國際和國內角度研究農業機器人技術領域的競爭機構,包括國內外競爭機構排名、機構活躍度、創新能力研究、主要競爭機構技術特長,以及主要機構的合作情況等。
4.1 國際申請人排名
如圖13所示:在全球專利申請排名前20位的申請人中,日本企業占了5席,分別是日本井關農機、久保田、洋馬、三菱和生物系特定產業技術研究推進機構;其他國家的企業有美國的迪爾和凱斯紐荷蘭、瑞典的胡斯華納、德國的博世及以色列的F ROBOTICS。各企業申請量的排名在一定程度上反映了企業技術創新能力,但是也和企業專利布局和重視程度等因素密切相關。
如圖14所示:選取農業機器人技術相關專利數量排名前5位的日本井關農機、中國江蘇大學、瑞典胡斯華納、日本久保田和美國迪爾分析其技術特長。結果顯示:日本久保田在末端執行器技術領域具有優勢;日本井關農機在目標探測與定位技術領域占據優勢;瑞典胡斯華納和美國迪爾則是在自動導航技術領域占據優勢。

圖13 主要專利申請人國際排名

圖14 全球重點企業技術特長
如圖15所示:在農業機器人種類方面,瑞典胡斯華納在收獲機器人方面占據優勢,該公司側重研發收獲機器人中的割草機器人;日本井關農機在田間作業機器人方面占據較大優勢;日本久保田在分級分選機器人方面占據一定優勢;美國迪爾則是在噴灌機器人方面占據優勢。
在全球專利申請排名前20位的申請人中,我國申請人最多,占據了10席,按申請量多少排序分別為江蘇大學、西北農林科技大學、中國農業大學、江南大學、浙江理工大學、浙江工業大學、南京農業大學、浙江大學、華南農業大學和北京農業智能裝備技術研究中心。這說明我國在農業機器人技術領域具備一定的研究實力。但同時我們也能發現,在這些申請人中,沒有中國企業的身影,說明在農業機器人領域我國仍然處于技術研發和積累階段,是國內申請人目前研究的熱點所在,技術水平還有待突破,未來存在很大的產業化發展空間。國內企業可以積極尋求與高等院校的技術合作,依托后者的研發實力加速技術產業化的進程。

圖15 全球重點企業農業機器人種類布局
4.2 國內申請人排名
如圖16所示:在所有715件中國專利中,中國申請人申請的專利是656件,占比91.7%,國外申請人申請的專利是59件,占比8.3%。在中國專利申請排名前20位的申請人中,國外申請人有瑞典胡斯華納公司(第10位)、德國博世公司(第12位)和美國迪爾公司(第20位),說明這3家公司更為重視中國的市場,需要在中國生產或銷售相關產品時對相關技術予以保護。除這3家公司外,其余17家均為國內申請人。在這17家國內申請人中,企業只有重慶友武科技有限公司,該公司申請的專利主題有采摘機械臂、采摘夾持器、采摘機器人底盤和采摘機器人視覺處理系統等,可以看出研發重點為收獲機器人中的采摘機器人,其余16家均為高校院所。
對TOP5的國內申請人進行技術布局分析,如圖17所示。由此可以發現:江南大學在末端執行器技術領域具有一定優勢,主要研發分級分選機器人的末端執行器;中國農業大學和西北農林科技大學則是在目標探測與定位和自動導航技術領域具有一定優勢。

圖16 中國專利主要申請人排名

圖17 中國專利主要申請人關鍵技術布局
從圖18可以看出:江蘇大學在收獲機器人的研發上具有一定優勢;浙江理工大學則是在田間作業機器人的研發上具有一定優勢;中國農業大學在植保機器人的研發上具有一定優勢;江南大學在分級分選機器人的研發上具有優勢。
4.3 機構活躍度
在機構活躍度分析中,將擁有專利族量20項以上的機構定義為大型機構,將擁有專利族量6~20項的機構定義為中型機構,將擁有專利族量為1~5項的企業定義為小型機構。
在圖19中,每塊扇形用不同顏色加以區分,代表每一類機構申請專利族數量之和。由圖19中可以看出:在國內外,大型機構專利族總和占到農業機器人專利族總量的19%;中型機構專利族總和占到專利族總量的11%;而小型機構專利族總量占70%。這表明,該領域的技術競爭非常激烈,仍處于發展期,沒有出現技術壟斷的巨頭公司。
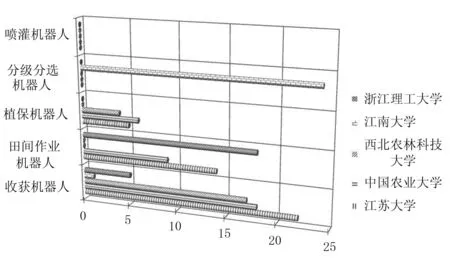
圖18 中國專利主要申請人農業機器人種類布局

圖19 基于機構活躍度的專利族數量分布圖
5技術引證
通過技術引證分析,可以發現專利被其他申請人的引用情況,也可以從中尋求許可機會,追蹤技術發展及識別專利權人的專利保護策略。
從表5可以看出:絕大多數高引專利還是來自美國企業,如美國凱斯紐荷蘭、天寶導航、迪爾和Vision Robotics等,日本則有本田公司,說明這些公司的專利有著很強的基礎性,專利受到關注更多,研究能力很高。

表5 農業機器人技術領域高引專利列表
6結論
從以上分析結果可以看出:農業機器人技術正處于發展期,目前國際上技術研發熱情很高,短期發展前景毋庸置疑。機械手的末端執行器、自動導航及目標探測與定位是該領域的重點研發技術,而收獲機器人、田間作業機器人、植保機器人是該領域的重點研發種類。該領域絕大多數高引專利來自美國企業,如美國凱斯紐荷蘭、天寶導航、迪爾和Vision Robotics等,日本則有本田公司,說明這些公司的專利有著很強的基礎性,專利受到關注更多,研究能力很高。
我國雖起步較晚,但近年來在該領域的專利申請量出現高速增長,遠遠超出同時期其他國家關于農業機器人的專利申請。這說明我國近年來對于農業機器人技術的研發熱情高漲,正在積極進行技術研發和儲備,為產業化作準備。
但是,也應該看到,中國雖然該領域優先權專利數量遠多于日本和美國,但無論是總被引次數、平均被引次數、專利被引率還是PCT專利數量及美國專利數量等,都遠低于美國,說明我國雖然相關專利數量多,但是專利質量較低,研發水平還有待進一步提高。
我國要想進一步發展農業機器人技術,需要從以下3個層次進行推進:
1)政府。大力實施知識產權戰略,提高知識產權的創造、運用、管理和保護能力,嚴厲打擊侵權行為,在社會層面上為農業機器人專利的創造和運用提供有力的環境和制度保證;完善產學研合作機制,有效整合企業與研究機構的力量,以市場化和實際運用為導向;引導共性科研平臺對農業機器人的投入,設立平臺專項運行經費,重點加強的末端執行器、自動導航及目標探測與定位等技術的研究開發;可在江蘇、浙江、山東等相關專利較多的省份,利用當地的科研成果優勢,構建農業機器人的產業集聚區,實現資源集約利用,提高整體效益。
2)企業。對于農業機器人技術領域,重點研發目標探測與定位技術、末端執行器和自動導航技術,突破路徑規劃、枝葉遮擋/果實重疊/逆光/擾動等條件下的視覺檢測、夜間圖像降噪、末端執行器的通用型等技術難點;重點關注日本井關農機、久保田、洋馬、三菱、美國迪爾、凱斯紐荷蘭、瑞典胡斯華納、德國博世、以色列F ROBOTICS等機構的相關專利申請;加強與江蘇大學、中國農業大學、西北農林科技大學、江南大學、浙江理工大學等高校的產學研合作;在下一步的產品研發、生產和銷售的過程中,可以在國外企業的重要專利(如表6所列出的高引專利)的基礎上進行研發。
3)產業園區。著重引進旨在研發農業機器人的企業,并給予傾斜性稅率補償;著重引進生產農業機器人配套零部件的企業;引導企業在產業園區內建立農業機器人技術研發中心。
參考文獻:
[1]李謙,蔡曉華.機器視覺在除草機器人中的應用[J]. 農機化研究,2014,36(7):204-206,231.
[2]劉立強,蔡曉華,吳澤全.基于OpenCV的除草機器人圖像處理技術[J].農機化研究,2013,35(12): 162-165.
[3]李良,張文愛,馮青春,等.溫室軌道施藥機器人系統設計[J].農機化研究,2016,38(1):109-112,118.
[4]李玉林,崔振德,張園,等.中國農業機器人的應用及發展現狀[J].熱帶農業工程,2014,38(4):30-33.
[5]姬江濤,鄭治華,杜蒙蒙,等.農業機器人的發展現狀及趨勢[J].農機化研究,2014,36(2):1-4,9.
[6]蘇媛,楊磊,宋欣,等.智能移動蘋果采摘機器人的設計及試驗[J].農機化研究,2016,38(1):159-162.
[7]丁巍,戈振揚,盧衷正.GPS組合模糊控制的農田機器人導航系統設計[J].農機化研究,2015,37(9): 109-112.
[8]趙洲,朱新華,何穎,等.機器人在溫室中的應用研究[J].農機化研究,2015,37(1):238-241,268.
[9]王寶梁,薛金林.開放式系統農業機器人技術概述[J].農機化研究,2013,35(6):8-12.
[10]許國瑞.農業機器人視覺導航系統研究[D].哈爾濱:東北農業大學,2013.
Abstract ID:1003-188X(2016)09-0001-EA
Studies on the Development Status of Agricultural Robot Related Technologies Based on Patent Map
Shen Kai, Lin Zhijian, Ying Xiangwei, Qiu Qiufei, Wu Qiaoling, Zhao Yunfei, Wu Yeqing
(Institute of Scientific and Technical Information of Zhejiang Province, Hangzhou 310006, China)
Abstract:Agricultural robot is an important potential development direction for agricultural machinery industry, which can improve the core competitiveness of relevant companies, drive technological innovations and promote the increase of agricultural production efficiency. In this article, based on the patent map of agricultural robot related technologies, the development status is investigated from five aspects, including development trend, key technology fields, regional distribution, rival agencies and highly cited patents, to provide intelligence support for further development of agricultural robot industry and technologies by related government, companies, universities and research institutes. Research results indicate that agricultural robot related technologies began a rapid development around 1995 and up to now. End effector of manipulator, automatic guidance and target detection & location are key technologies of R&D. Harvesting robot, field operation robot and crop protection robot are key species of R&D. China has great R&D enthusiasm towards agricultural robot related technologies in recent years, and has applied a large number of patents. However, compared to USA and Japan, the patent quality of China is a bit lower and China lacks core patents. Thus, the technological level of China in agricultural robot field needs further improvement.Moreover, countermeasures and suggestions are presented for the development of agricultural robot in China from three levels, including government, companies and industrial parks.
Key words:agricultural robot; patent map; competitive intelligence
中圖分類號:S24
文獻標識碼:A
文章編號:1003-188X(2016)09-0001-09
作者簡介:諶凱(1984-),男,武漢人,助理研究員,博士,(E-mail)shenkai@zjinfo.gov.cn。通訊作者:應向偉(1961-),男,浙江永康人,高級記者,(E-mail)yxw@zjinfo.gov.cn。
基金項目:浙江省創新團隊建設與人才培養項目(2013F20009)
收稿日期:2015-08-26
