基于振動機理的馬鈴薯挖掘機的試驗研究
2016-03-23 06:10:20李紫輝尚琴琴王英博呂金慶
農機化研究 2016年9期
李紫輝,楊 穎,尚琴琴,王英博,呂金慶
(東北農業大學 工程學院,哈爾濱 150030)
?
基于振動機理的馬鈴薯挖掘機的試驗研究
李紫輝,楊穎,尚琴琴,王英博,呂金慶
(東北農業大學 工程學院,哈爾濱150030)
摘要:為解決西南地區、部分北方及中原地區馬鈴薯機械化收獲問題,結合國內馬鈴薯的種植模式和農藝要求,對單行振動式馬鈴薯挖掘機進行了試驗研究。以馬鈴薯挖掘機的前進速度、挖掘深度、振動頻率為試驗因素,以機具的牽引阻力為試驗指標,進行正交試驗。結果表明:牽引阻力最小時的參數組合為挖掘深度139~155mm,振動頻率13~14Hz,前進速度2.5~3km/h;在此條件下進行驗證試驗,此時平均牽引阻力為956.6N,該機具在有振動條件下的牽引阻力較無振動時降低36.2%;田間收獲試驗的明薯率和傷薯率分別為97.20%和3.52%,符合相關標準要求。該研究為小地塊和復雜耕地條件的馬鈴薯機械化收獲問題提供了解決方案,為小型馬鈴薯挖掘機的深入研究提供了參考。
關鍵詞:馬鈴薯挖掘機;牽引阻力;參數優化
0引言
馬鈴薯因其營養豐富、食用后產熱量高,且在中國的種植面積大(約占世界種植面積的1/4),已成為重要的糧食安全作物[1-5]。2015年,農業部把馬鈴薯主糧化工作列入了重要議程。馬鈴薯的主糧地位確立后,其種植面積還將進一步擴大,以期增加產量[6-7]。但目前中國馬鈴薯的單產量卻遠低于世界平均單產量,主要原因之一是中國各地區耕作條件、農藝標準不一,造成了馬鈴薯產業的綜合機械化水平低[8-9]。其中,馬鈴薯收獲的機械化水平急需提高。
在西南一、二季混作區和南方冬作區,地區多石塊,山地丘陵地帶眾多,田地分散、坡度大,成階梯狀分布,目前普遍使用的馬鈴薯挖掘機因體積大和配套動力大,不適用于山區行走和運作。北方一季作區和中原二作區有大量分散的小戶農田,也無法使用大型機器作業。最終造成近50%的產區依然采取人工收獲,導致工人勞動強度大、作業效率低,不利于馬鈴薯產業的發展[10]。
針對上述問題,結合各地區馬鈴薯種植模式,對基于振動機理的馬鈴薯挖掘機進行了試驗研究。該振動式馬鈴薯挖掘機為適用于我國各地農藝種植要求的新型馬鈴薯收獲機具,其體積小巧,配套動力小于18.4kW,在山地行走靈活,消耗油量小;運用振動原理,明顯提高土壤濕度大的壟作時的土薯分離效果,減小了機具作業時的行進阻力。為此,進行牽引阻力試驗獲得了最小功耗作業參數,并在此參數條件下進行田間挖掘試驗,驗證振動減阻原理。通過以上試驗獲得較合理的作業速度、挖掘鏟的挖掘深度和振動篩的振動頻率,進而提高馬鈴薯挖掘機的各項收獲性能指標,提高收獲效率、降低能耗及使用成本。
1總體方案及技術參數
1.1 種植模式及農藝要求
由于各地自然條件、耕作制度和馬鈴薯的用途等不同,不同地區馬鈴薯作物機械化挖掘的行距與栽培制度也不相同。根據調查,近幾年來機械化收獲的各地區馬鈴薯地區的種植模式,歸納其種植模式為壟作,壟高約150~300mm,壟寬約180~300mm,行距約750~900mm。
1.2 整機結構及技術參數
針對我國較為普遍的馬鈴薯種植模式和農藝要求,從國情出發,并考慮大坡度、多石塊、丘陵山地的地理條件,以及育種產品的分段挖掘和種植面積較小的小戶農田的適用性,該機具設計為雙牽引式小型單行振動式馬鈴薯挖掘機,總體結構如圖1所示。整機主要由機架、偏心機架、振動架、振動篩、挖掘鏟、鉸接臂、偏心輪及傳動軸等部件組成。

1.機架 2.偏心機架 3.振動架 4.后支架 5.調節手柄
該機可一次完成挖掘、輸送、分離及集條鋪放等作業。具體功能及工作過程為:機具行進過程中,由小四輪拖拉機牽引前進;振動動力由拖拉機動力輸出軸傳遞至機具的偏心輪,帶動相連的鉸接臂轉動,經鉸接臂將相應動力傳遞給振動架;振動架兩端裝設的雙搖桿機構隨之轉動,從而使挖掘鏟和分離柵產生相對往復振動。土薯混合物被挖掘鏟掘起后,被推遞至分離篩上;篩條位于挖掘鏟的后方,較小塊土壤在篩條及分離篩的往復運動的作用下直接落到地表,較大的土塊和馬鈴薯受到振動后沿著篩條流向機具尾部,被鋪放于地表,以便收集。整機主要技術參數如表1所示。

表1 振動式馬鈴薯挖掘機主要技術參數
該機具設計合理,工作可靠,故障率低。作業時,挖掘鏟與振動篩同時反向振動,不僅提高了土薯分離效果,又使得挖掘鏟和振動篩因振動產生的部分慣性力得以相互抵消,提高了機具的穩定性[11]。由于振動的作用,機具作業時受到來自土壤等的阻力明顯降低,節省了機具的使用能耗及使用成本。
2牽引阻力試驗
2.1 試驗條件
為了證明該機具采用的振動減阻設計原理合理有效,在東北農業大學試驗田進行牽引阻力試驗,試驗田地形平坦,坡度小于5°,土壤含水率為19.02%,堅實度為25.36%。
2.2 試驗設計
進行牽引阻力試驗時,使用兩臺拖拉機:第1臺為動力輸入拖拉機(豐收180-13),其動力輸出軸與機具的傳動軸連接,為機具的振動機構提供動力;第2臺為牽引拖拉機(約翰迪爾280),安裝在動力輸入拖拉機的前方,負責牽引機具前進。試驗的實際作業如圖2所示。

圖2 實際作業
本試驗采用Box-Behnken設計方法,以挖掘鏟的挖掘深度、振動篩的振動頻率和機具前進速度為試驗因素,牽引阻力為評價指標,因素水平編碼如表2所示。將挖掘機空行時(挖掘深度為0mm)牽引設備的滾動阻力記為F1,挖掘鏟入土時牽引設備的滾動阻力記為F2,則馬鈴薯挖掘機實際工作時的牽引阻力F為
F=F2-F1
(1)
式中F—實際牽引阻力;
F1—空行時牽引設備的滾動阻力;
F2—挖掘鏟入土時牽引設備的滾動阻力。
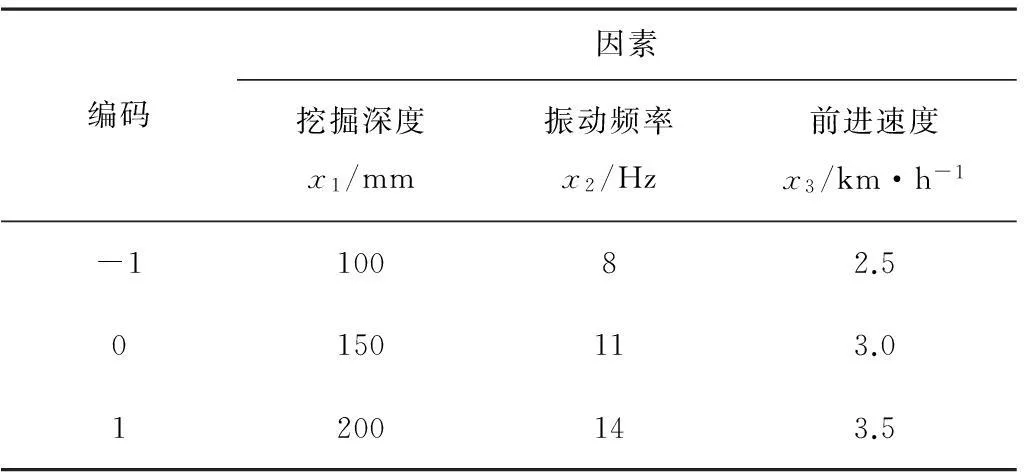
表2 因素水平編碼表
為保證測得的試驗數據穩定可靠,每組處理的試驗長度為100m,記錄機具穩定運行的中間60m的數據用于結果分析。每組處理重復5次,記錄平均值。試驗方案及結果如表3所示。

表3 試驗方案和結果分析
2.3 試驗結果分析
對數據進行方差分析,分析結果如表4所示。由方差分析的結果,得到各因素關于牽引阻力Y的回歸方程為
Y=1322.00+90.75x1-277.87x2+66.63x3-46.00x1x2+
(2)
由表4可知:整體模型極顯著(P<0.000 1)、失擬性檢驗結果為不顯著(P=0.515 8),說明試驗有效,回歸方程的擬合性好,所有對試驗指標有顯著影響的因素均已考慮。由各項相關系數檢驗可知:挖掘深度x1、振動頻率x2、前進速度x3及前進速度的二次項x32對試驗指標均達到極顯著影響(P<0.01);挖掘深度與振動頻率的交互項x1x2、振動頻率與前進速度的交互項x2x3、挖掘深度的二次項x12和振動頻率的二次項x22對試驗指標均達到顯著影響(0.01

表4 方差分析
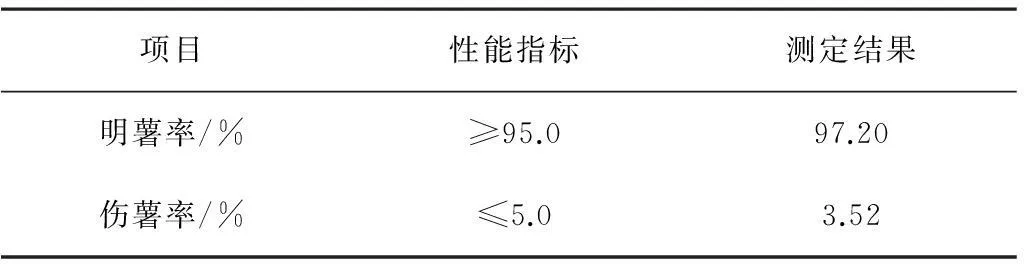
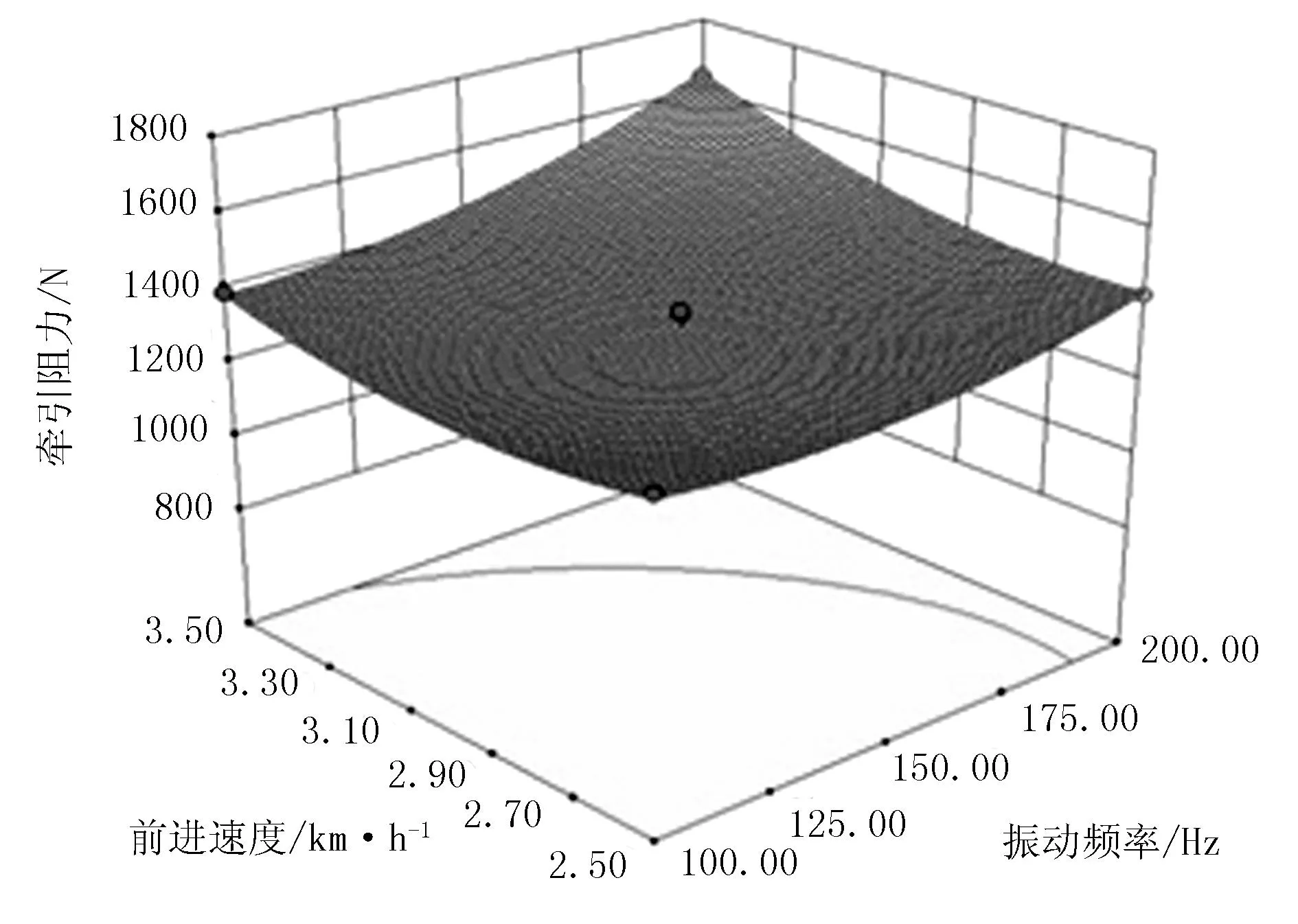
“***”表示影響極顯著,即P<0.01;“**”表示影響顯著,即0.01 前進速度位于零水平時,挖掘深度和振動頻率的交互作用對牽引阻力影響如圖3所示。由圖3可知:當挖掘深度增加時,牽引阻力先減小后增加,但整體變化幅度不大;當振動頻率增加時,牽引阻力明顯減小;振動頻率對牽引阻力的影響強度大于挖掘深度;當挖掘深度為125~150mm,振動頻率為14Hz時,牽引阻力達到最小。 圖3 挖掘深度和振動頻率的交互作用 振動頻率位于零水平時,挖掘深度和前進速度的交互作用對牽引阻力的影響如圖4所示。由圖4可知:牽引阻力隨著挖掘深度和前進速度的增大而增大,兩個因素對牽引阻力的影響強度相當;當挖掘深度為100mm,前進速度為2.5km/h時,牽引阻力達到最小值。 圖4 挖掘深度和前進速度的交互作用 挖掘深度位于零水平時,振動頻率和前進速度的交互作用對牽引阻力的交互作用如圖5所示。由圖5可知:當振動頻率變化時,牽引阻力的變化十分明顯;但是當前進速度改變時,相比而言,牽引阻力僅發生小幅改變;振動頻率對牽引阻力的影響強度明顯大于前進速度;當振動頻率為14Hz,前進速度為2.5km/h時,牽引阻力達到最小值。 圖5 振動頻率和前進速度的交互作用 為求得該機具的最小牽引阻力作業參數,利用Design-Expert8.0.5b軟件的優化模塊,以馬鈴薯挖掘機的牽引阻力為優化目標,進行有約束目標最小化優化,并利用牛頓迭代法進行求解。優化約束條件為 約束函數: 100 馬鈴薯挖掘機作業時,最優參數組合需根據機具的具體作業情況而定。若挖掘鏟的挖掘深度過大,會增加機具的牽引阻力;但挖掘深度過小,雖然牽引阻力降低,但機具的傷薯率增加。振動篩的振動頻率增加,可以有效降低牽引阻力;但振動頻率過大時,機具作業的穩定性受損[11]。機器作業時要有一定的作業速度,以保證收獲效率;但速度過大,不僅增加牽引阻力,還會使土薯分離不夠徹底,影響收獲質量。經響應曲面優化模型迭代收斂,得到馬鈴薯挖掘機的最終優化結果為:挖掘深度為139~155mm,振動頻率為13~14Hz,前進速度為2.5~3km/h,對應平均牽引阻力為948.5N。 3驗證試驗 為驗證該優化參數合理可靠,在東北農業大學試驗田進行驗證試驗,試驗條件與牽引阻力試驗相同。取挖掘深度為145mm、振動頻率為13Hz、前進速度為3km/h,測得10次挖掘作業牽引阻力的平均值為956.6N,與理論值相差較小,驗證了該優化參數的正確性。 各因素取上述水平,以明薯率和傷薯率為試驗指標,在黑龍江省哈爾濱市香坊農場進行田間收獲試驗,試驗結果如表5所示。取振動頻率為0Hz,其他參數不變,測得10次挖掘作業的平均牽引阻力為1 499.7N,機具振動狀態下的牽引阻力相比無振動狀態的牽引阻力降低了36.2%,驗證了振動減阻原理的合理性。在此作業條件下收獲馬鈴薯時,明薯率和傷薯率分別為97.20%和3.52%,均能滿足國家標準要求[12]。 表5 田間收獲試驗結果 4結論 1)由試驗結果可知:振動頻率對牽引阻力影響最大,挖掘深度次之,前進速度的影響最小。機具作業的最優參數為:挖掘深度為139~155mm,振動頻率為13~14Hz,前進速度為2.5~3km/h。在此條件下進行驗證試驗,結果顯示牽引阻力為956.6N。 2)在最優參數組合下進行田間收獲試驗,明薯率為97.2%,傷薯率為3.52%,符合國家標準的要求;且此條件下機具作業的牽引阻力較無振動條件時降低36.2%,證明振動減阻原理合理可行。 參考文獻: [1]劉俊霞.中國馬鈴薯國際貿易研究[D].楊凌:西北農林科技大學,2012. [2]謝敬波.脫毒微型馬鈴薯排種器設計與試驗研究[D].武漢:華中農業大學,2012. [3]劉洋,高明杰,何威明,等.世界馬鈴薯生產發展基本態勢及特點[J].中國農學通報,2014,30(20):78-86. [4]隋啟君,李先平,楊萬林.中國馬鈴薯生產情況分析[J].西南農業學報,2008(4):1182-1188. [5]魏延安.世界馬鈴薯產業發展現狀及特點[J].世界農業,2005(3):29-32. [6]王希卓,朱旭,孫潔,等.我國馬鈴薯主糧化發展形勢分析[J].農產品加工,2015(2):52-55. [7]楊帥,閔凡祥,高云飛,等.新世紀中國馬鈴薯產業發展現狀及存在問題[J].中國馬鈴薯,2014,28(5):311-316. [8]謝開云,屈冬玉,金黎平,等.中國馬鈴薯生產與世界先進國家的比較[J].世界農業,2008(5):35-38,41. [9]柳俊.我國馬鈴薯產業技術研究現狀及展望[J].中國農業科技導報,2011,13(5):13-18. [10]呂金慶,田忠恩,楊穎,等.馬鈴薯機械發展現狀、存在問題及發展趨勢[J].農機化研究,2015,37(12):258-263. [11]呂金慶,田忠恩,吳金娥,等.4U1Z型振動式馬鈴薯挖掘機的設計與試驗[J].農業工程學報,2015,31(12):39-47. [12]NY/T 648-2002馬鈴薯收獲機作業質量評價技術規范[S]. Experimental Study of Potato Digger Based on Vibration Mechanism Li Zihui, Yang Ying, Shang Qinqin, Wang Yingbo, Lv Jinqing (College of Engineering, Northeast Agricultural University, Harbin 150030, China) Abstract:To solve the potato mechanized harvest problem in southwest, part of the northern and the central plains region, combined with cropping patterns and agronomic requirements of domestic, an experimental study was carried out on the single-line vibrating potato digger.Forward speed, digging depth and vibration frequency were the test factors.Traction resistance was the evaluation index. The results of the orthogonal test show that when the digging depth is 139~155mm, the vibration frequency is 3~14Hz and the forward speed is 2.5~3.0km/h, the traction resistance reaches a minimum. Under this condition a verification test was carried out and the results show that the average traction resistance is 956.6N, decreased 36.2% compared to the operation with no vibration. While the obvious rate and the injury rate in harvest test were 97.2% and 3.52% respectively. They all comply with the relevant standards. This paper provided a solution for the potato mechanized harvest in small plots and complicated condition arable land and provided a reference for the further development of potato digger. Key words:potato digger; traction resistance; parameters optimization 中圖分類號:S225.7+1 文獻標識碼:A 文章編號:1003-188X(2016)09-0186-05 作者簡介:李紫輝(1961-),男,黑龍江雙城人,高級工程師,碩士,(E-mail)ri501@163.com。通訊作者:呂金慶(1970-),男,哈爾濱人,研究員,國家馬鈴薯產業技術體系崗位科學家,(E-mail)ljq8888866666@163.com。 基金項目:現代農業產業技術體系建設專項(CARS-10-P22);“十二五”國家科技支撐計劃項目(2014BAD06B03);黑龍江省重大科技攻關項目 (GA15B401);云南省冬季無公害高產技術體系構建及應用項目(2014YNC001) 收稿日期:2015-11-02

2.4 參數優化