免耕播種機播種深度實時監測系統
2016-03-23 06:10:22朱龍圖于婷婷黃東巖賈洪雷
農機化研究 2016年9期
關鍵詞:單片機
閆 荊,朱龍圖,于婷婷,黃東巖,賈洪雷
(1.吉林農業大學 信息技術學院,長春 130118; 2. 吉林大學 工程仿生教育部重點實驗室,長春 130022)
?
免耕播種機播種深度實時監測系統
閆荊1,朱龍圖1,于婷婷1,黃東巖1,賈洪雷2
(1.吉林農業大學 信息技術學院,長春130118; 2. 吉林大學 工程仿生教育部重點實驗室,長春130022)
摘要:為了提高秸稈覆蓋地免耕播種作業后的出苗一致性,應用聚偏二氟乙烯Polyvinylidence fluoride PVDF壓電薄膜制作兩種不同粘貼模式胎面形變傳感器,實時監測限深輪的形變量,由此間接測量播種機播種深度,并對兩種傳感器進行對比試驗。系統硬件電路對傳感器產生的信號放大濾波,提取信號峰值,系統根據峰值信號實時監測播種深度。試驗結果表明:兩種傳感器的輸出電壓均與限深輪承受的載荷成線性的正比關系;拱形傳感器的靈敏度明顯高于平鋪形傳感器,在作業速度為5~8km/h時,系統測量準確率達到85%。
關鍵詞:實時監測;免耕播種機;播種深度;壓電薄膜;單片機
0引言
旱作保護性耕作是現代農業耕作技術,代表著先進農業耕作制度、耕作方式,是目前旱作農業推崇的先進、適用、經濟、環保的耕作方法。在保護性耕作系列流程中包括有秸稈殘留物管理技術、深松替代深翻技術、殘留物覆蓋耕作技術及藥劑鋤草免中耕4項技術,其核心技術是覆蓋免耕播種技術[1-3]。覆蓋免耕播種技術是以作物秸稈殘茬覆蓋在地表,不翻耕土壤,通過免耕播種機一次完成破茬、開溝、播種、施肥、覆土、鎮壓等作業。由于地表覆蓋殘茬增加了地表的粗糙度,免耕播種機播種深度控制成為能否完成高效、優質、快捷的機械化播種任務成為關鍵。
近年來,免耕播種機播種深度自動控制技術發展較快[4-7],不少科研工作者將電液控制仿形系統應用在大豆、玉米精播機上控制播種深度。進行播種作業時,系統由超聲波傳感器感應地面起伏的變化,實時將地面起伏信號轉換成電信號;根據該電流信號驅動液壓缸控制四連桿機構上下浮動,實現播種深度的控制。這種仿形機構雖然能夠在一定程度的起伏地表自動控制播種深度,但土壤堅實度差異較大時,僅依靠超聲波傳感器檢測地表的起伏變化,很難使播種深度一致性達到預期效果[8-11]。
筆者所在項目組研制開發了基于PVDF壓電薄膜的氣動免耕播種機播種深度自動控制系統[7],系統應用PVDF壓電薄膜測量免耕播種機限深輪的胎面形變量,根據限深輪的胎面形變量控制空氣彈簧推力,控制四連桿上下浮動,從而控制播種深度。該系統響應速度快,仿形性能可靠,能夠精確控制播種深度。為進一步提高該系統靈敏度,對比分析了壓電薄膜傳感器的兩種不安裝模式,設計了播種深度實時監測系統的信號處理電路,對兩種不同安裝模式的壓電薄膜傳感器信號進行了對比測試,說明了其各自的優缺點,為深入研究基于PVDF壓電薄膜的氣動免耕播種機播種深度自動控制系統提供了依據。
1系統工作原理
如圖1(a)所示:免耕播種機的四連桿機構可以使播種單體根據地表的起伏變化上下浮動。播種單體的開溝部件主要有爪輪、圓盤波紋刀、限深輪和開溝圓盤,一對爪輪左右對稱安裝在圓盤波紋刀兩側靠前位置,一對橡膠限深輪左右對稱安裝在開溝圓盤的兩側靠后位置。播種作業時,播種單體靠自重與空氣彈簧推力使爪輪、圓盤波紋刀和開溝圓盤的下部切入到土壤中,限深輪壓在種床土壤表面避免開溝圓盤切入土壤過深,開溝圓盤與限深輪的高度差為播種機開溝深度。播種機前進時,爪輪旋轉并撥開秸稈與雜草,波紋圓盤刀切開地表與根茬并松土,開溝圓盤切入到土壤中,并且在其兩側堆積足夠的土壤以便填埋種子。作業時必須保證播種單體對地表有足夠壓力,播種單體對地表壓力能夠反映出開溝圓盤的開溝效果以及種子的填埋效果,橡膠限深輪在壓力的作用下產生變形,壓力越大變形越大。因此,可以根據橡膠限深輪產生的變形量間接判斷播種機的播種深度。
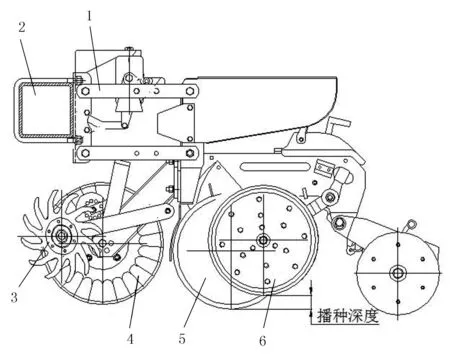
1.機架 2.四連桿機構 3.爪輪 4.圓盤波紋刀
2PVDF壓電薄膜傳感器
傳感器選用美國Measurement Specialty公司生產的型號為DT2-028K/L壓電薄膜傳感器,如圖2所示,其尺寸參數如表1所示。
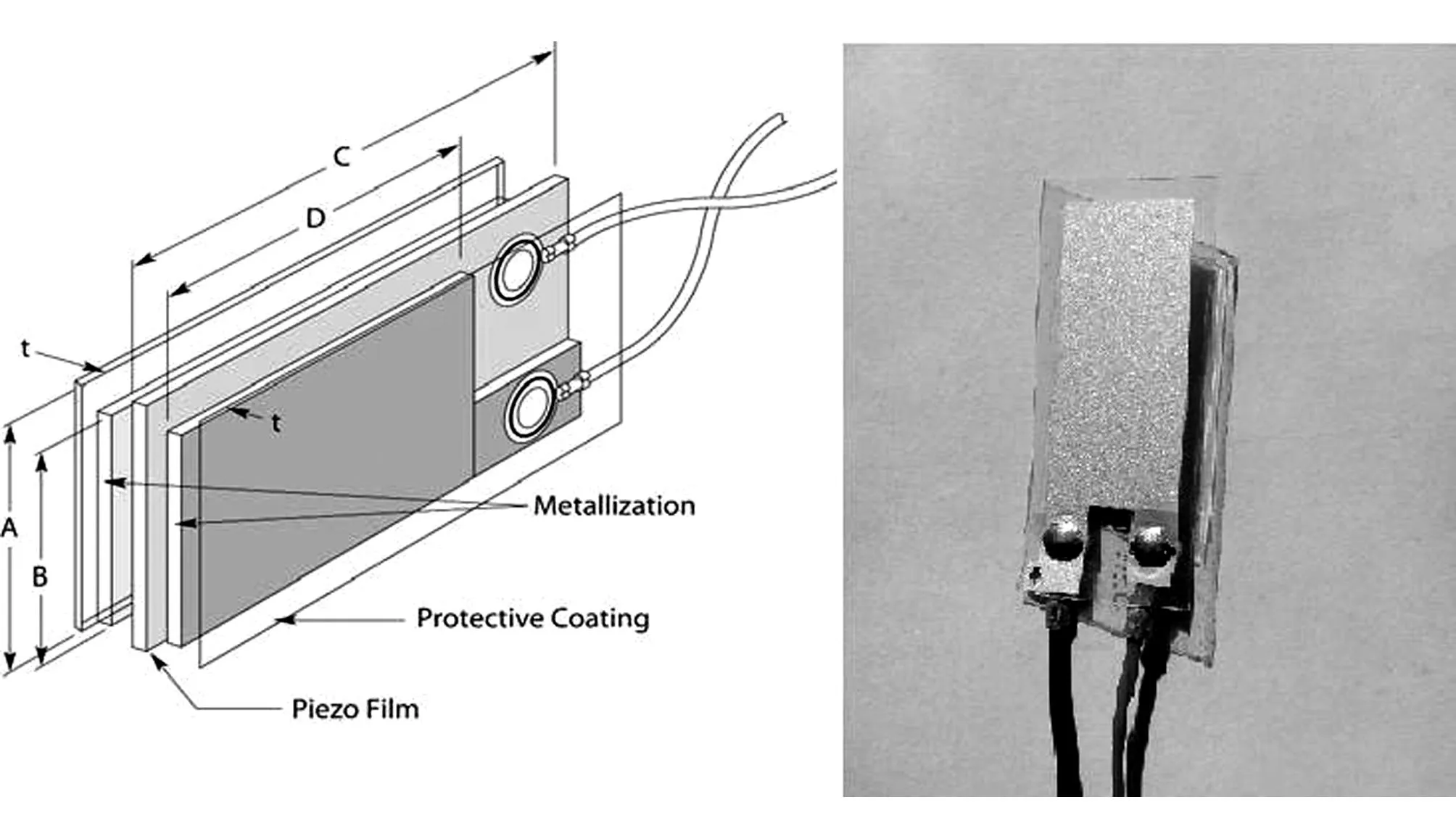
圖2 PVDF壓電薄膜傳感器外形圖

mm
如圖3所示:PVDF壓電薄膜傳感器分別以兩種不同的安裝模式粘貼在橡膠限深輪內表面:一種以平鋪的模式粘貼,另一種以拱形的模式粘貼。橡膠限深輪與地面的接觸部分稱為印痕區,傳感器進入和離開印痕區時會產生周期性形變,形變使PVDF壓電薄膜的兩個上下金屬電極表面出現正負相反的電荷。對壓電薄膜產生的電荷信號進行放大濾波后,其峰值信號能夠反映限深輪胎面形變量的大小,從而可以間接判斷此時播種機的播種深度。

圖3 PVDF壓電薄膜傳感器安裝模式
3系統硬件電路設計
系統硬件電路包括電荷放大器、信號濾波器、峰值保持器、A/D轉換器、微處理器和PC機等。PVDF傳感器所產生的信號太過微弱,不便于直接采集,需要經過電荷放大器放大處理。電荷放大器除了起到放大電荷信號的作用,還能將電荷信號轉換成便于測量的模擬電壓信號。之后,信號濾波器將對該模擬電壓信號再進行濾波處理,用以濾除電壓信號中的低頻干擾信號。然后,模擬電壓信號經峰值保持器后,其峰值電壓將會被保持,而A/D轉換器則將該峰值信號變為數字信號;該數字電壓信號經微處理器采集、處理后,再被傳至PC機上,以完成相關的處理、顯示和分析等操作。同時,微處理器將會給峰值保持器一個復位電平,以便峰值保持器能夠持續反復的工作。
本文采用的微處理器為STC12C5A60S2單片機,內部集成專用復位電路、PWM調制器及10位A/D轉換器等。本文所用的A/D轉換器為該單片機內部所集成;選用的峰值保持器為AD公司PKD01,能跟蹤模擬輸入信號,并能保持該信號達到最大值;采用LCD12864液晶屏作為顯示屏;微處理器與PC機之間通過RS-232串行接口進行通信。
圖4中,電荷放大器和信號濾波器是整個信號處理中最為關鍵的兩部分。電荷放大器除了具有放大微弱信號的功能外,還具有將高阻抗輸入轉換成低阻抗輸出的能力;而信號濾波器則可以起到消減和抑制噪聲信號的作用。
電荷放大器是一個帶反饋電容器的高增益運算放大器,其輸出電壓Vo正比于輸入電荷量Q,并由反饋電容Cf所決定,與信號的頻率特性無關。在該測量系統中采用電荷放大器的另一優勢是輸出模擬電壓信號不受導線間的電容影響。
由于PVDF薄膜在放電過程中存在漏電現象,這使得誤差得以產生,因此可以通過增加放大器中的放電時間常數來達到最小化誤差的目的。在電路的電荷轉換部分采用高輸入阻抗運算放大器CA3140來實現電荷到電壓的轉換功能。該運算放大器的輸入阻抗可達1.5TΩ,帶寬為4.5MHz,典型偏置電流強度為10pA,輸入偏移電壓小于5mV。
系統噪聲包括來自所使用的元器件、50Hz的工頻干擾、電磁干擾和熱電效果等。本研究分別采用低通濾波器和50Hz雙T陷波濾波器來消減、抑制器件噪聲和50Hz工頻干擾。
PVDF壓電傳感器是一種弱阻尼振蕩系統,在高頻段,存在較高的諧振峰,從而引起高頻噪音。此外,在一些動態測量中,有時候通頻帶遠遠超過了實際的需求,造成低頻帶的測試精度被不需要的高頻帶所干擾。因此,在本研究中使用低通濾波器是非常有必要的,其能夠讓低頻交流分量通過,并極大地衰減不需要的高頻分量。
無源低通濾波器具有結構簡單、抗干擾性強等特點,然而由于其阻抗頻率特性具有弱共振性能,使其具有弱選擇性的特征。為了克服這些缺點,將有源元器件(如運算放大器)加入到RC濾波器的設計之中,從而形成了有源RC濾波器。在有源RC濾波器中,通頻帶內的信號不但不會衰減,反而能夠得到增益。
圖4中濾波單元屬于5階巴特沃思低通濾波器,其截止頻率為500Hz。采用低噪聲前置放大器、高精密金屬膜電阻和陶瓷電容來消減由元器件所引入的噪音。

圖4 系統硬件電路
50Hz雙T陷波濾波器電路主要包括兩部分:第1部分是一個雙T陷阱,可以看著作為2階帶阻濾波器。對于50Hz陷波濾波器,其中心頻率和中心角頻率分別為50Hz和100rad/s。該電路只對50Hz的信號起作用。第2部分是一個集成運算放大器,選用的是LM324,可以為信號提供有源反饋,提高了信號質量。
4系統軟件設計
系統程序流程圖如圖5所示。系統工作開始后,首先對系統工作模塊、相關寄存器和I/O口進行初始化設置;接著,系統運行A/D采集程序,以獲取峰值保持器所保持的峰值信號;然后,由程序控制單片機給峰值保持器一個復位電平,以清除所保持的峰值信號;之后,再清除所給的復位電平,即讓峰值保持器處于峰值檢測狀態,以便A/D采集器能夠完成下次峰值信號的采集;接著,程序將執行數據處理操作,并將處理后的結果顯示在LCD液晶屏上;最后,通過串口傳輸程序將處理后的數據上傳至PC機。

圖5 程序流程圖
5試驗結果與分析
5.1 PVDF壓電薄膜傳感器承載試驗
試驗使用平鋪與拱形兩種不同粘貼模式的傳感器,為研究不同地表狀況對系統輸出信號的影響,在土槽中鋪設出平均堅實度為1.4kg/cm2和3.5kg/cm2,長度5m,寬度0.5m的軟硬兩條種床。限深輪的行進速度為5km/h。傳感器輸出電壓與限深輪承載的關系曲線如圖6所示。其中,曲線1為限深輪行進在硬種床時,拱形傳感器的輸出電壓;曲線2為限深輪行進在軟種床時,拱形傳感器的輸出電壓;曲線3為限深輪行進在硬種床時,平鋪形傳感器的輸出電壓;曲線4為限深輪行進在軟種床時,平鋪形傳感器的輸出電壓。由圖6可以看出:隨著限深輪承受載荷的增加,限深輪胎面變形量變大,兩種傳感器的輸出電壓增加,傳感器的輸出電壓與限深輪承受的載荷成線性的正比關系;拱形傳感器的靈敏度明顯高于平鋪傳感器的靈敏度;拱形傳感器受地表堅實度影響較大,平鋪形傳感器幾乎不受地表堅實度的影響。

圖6 傳感器輸出電壓與限深輪承載關系曲線
5.2 田間性能試驗
2015年春季,在吉林農業大學試驗農場進行留茬地表的田間試驗,如圖7所示。試驗地土壤為黑鈣土,前茬作物為玉米,地表土壤含水率0~5cm深度為 16.7%,土壤容重1.6g/cm3,種床土壤平均堅實度2.4kg/cm2,留茬高度10~16cm。系統安裝在吉林康達2BMZF-2X型免耕精量施肥播種機上,設定播種深度為50mm。隨機選取3個測區,測區長度10m。拖拉機勻速通過試驗區,拖拉機作業速度5~8km/h;播種機通過后,將開溝器推出的松散土壤刮掉,以壟體的初始平面為測量基準,不同作業速度下重復測量播深,試驗結果如表2所示。

圖7 田間試驗效果圖

作業速度/km·h-1電壓值/mV拱形傳感器平鋪形傳感器播深/mm5121605161296255712863538985845
在吉林農業大學試驗農場進行秸稈覆蓋地表的田間試驗,試驗地為玉米保護性耕作,地表土壤含水率0~5cm深度為 19.4%,土壤容重1.2g/cm3,種床平均堅實度2.7kg/cm2;播種前地表秸稈覆蓋率平均為75.15%,播后平均為47.1%,地表的秸稈植被覆蓋量為0.73kg/m2。設定播種深度為 50mm;隨機選取3個測區,測區長度10m,為便于測量,卸下播種機覆土裝置。試驗結果如表3所示。

表3 秸稈覆蓋地試驗結果
綜上所述,對比兩種不同模式的傳感器,無論在留茬地與秸稈覆蓋地,均能夠反映播種深度變化;播種速度不影響傳感器的輸出;拱形傳感器相對比較靈敏。由于所選擇地塊土壤堅實度變化不大,拱形傳感器的輸出電壓沒有受到地表狀況的影響,兩種傳感器的測量準確度均達到85%以上。
6結論
1)應用PVDF壓電薄膜制作兩種不同粘貼模式胎面形變傳感器,實時監測限深輪的形變量,由此間接測量播種機播種深度。對兩種傳感器進行對比試驗,試驗結果表明:兩種傳感器的輸出電壓均與限深輪承受的載荷成線性的正比關系;拱形傳感器的靈敏度明顯高于平鋪形傳感器,但拱形傳感器受地表堅實度影響較大,平鋪形傳感器幾乎不受地表堅實度的影響。
2)設計了結構簡單的播種深度監測系統硬件電路及相應軟件,系統硬件電路能夠有效地對PVDF傳感器所產生的信號進行放大濾波,采集傳感器信號的峰值,計算峰值平均值。
3)田間試驗結果表明:播種深度監測系統在播種機作業速度為5~8km/h時,測量準確率達到85%。
參考文獻:
[1]臧英,高煥文,周建忠. 保護性耕作對農田土壤風蝕影 響的試驗研究[J]. 農業工程學報,2003,19(2):56-60.
[2]高煥文,李洪文,李問盈. 保護性耕作的發展[J]. 農業機械學報,2008,39(9):43-48.
[3]胡立峰,李洪文,高煥文. 保護性耕作對溫室效應的影響[J]. 農業工程學報,2009,25(5):308-312.
[4]高煥文,李洪文,姚宗路. 我國輕型免耕播種機研究[J].農業機械學報,2008,39(4):78-82.
[5]廖慶喜,高煥文,舒彩霞. 免耕播種機防堵技術研究現狀與發展趨勢[J].農業工程學報,2004,20(1):108-112.
[6]尹彥鑫,鄭永軍,成智華,等.少免耕播種機牽引阻力遠程監測系統[J].農業工程學報,2014,30(6):1-8.
[7]黃東巖,朱龍圖,賈洪雷,等.基于壓電薄膜的免耕播種機播種深度控制系統[J].農業機械學報,2015,46(4):1-8.
[8]Anthonis J, Mouazen A M, Saeys W, et al.An automatic depth control system for online measurement of spatial variation in soil compaction, part 3:Design of depth control system[J].Biosystems Engineering, 2004, 89(1): 59- 67.
[9]Mouazen M, Anthonis J, Saeys W, et al. An automatic depth control system for online measurement of spatial variation in soil compaction, part Ⅰ:Sensor design for measurement of frame height variation from soil surface[J].Biosystems Engineering, 2004, 89(2): 139- 150.
[10]Saeys W, Mouazen A M, Anthonis J, et al.An automatic depth control system for online measurement of spatial variation in soil compaction, part 2:Modelling of the depth control system[J]. Biosystems Engineering, 2004, 89(3): 267-280.
[11]Mouazen M, Anthonis J, Romon H. An automatic depth control system for online measurement of spatial variation in soil compaction, part 4: Improvement of compaction maps by using a proportional integrative derivative depth controller[J].Biosystems Engineering, 2005, 90(4): 409-418.
Abstract ID:1003-188X(2016)09-0214-EA
Seeding Depth Real-time Monitoring System for a No-till Planter
Yan Jing1, Zhu Longtu1,Yu Tingting1,Huang Dongyan1, Jia Honglei2
(1.College of Information, Jilin Agricultural University, Changchun 130118, China; 2.Key Laboratory of Bionics Engineering, Ministry of Education,Jilin University, Changchun 130022, China)
Abstract:In order to improve the consistency of seedling on the straw mulching farmland, a deformation sensor made of polyvinylidene fluoride, or PVDF, film is fixed on the inner surface of depth wheel with two different types to monitor the deformation of the wheel in real-time. According to the deformation, the seeding depth can be measured indirectly, and the two different types of sensor are compared. The system hardware circuit can amplify and filter the signal generated by the sensor, and can extract the signal peak. The system is able to monitor the seeding depth in real-time based on the peak signal. The result shows that the output peak voltage of the two types of sensor is linearly proportional to the load of the depth wheel. And the sensitivity of the arched sensor is significantly higher than that of the tiled sensor. When the speed of the planter is between 5Km/h to 8Km/h, the accuracy of the system is more than 85%.
Key words:real-time monitoring; no-till planter; seeding depth; piezoelectric film; chip microprocessor
中圖分類號:S232.2+6
文獻標識碼:A
文章編號:1003-188X(2016)09-0214-05
作者簡介:閆荊(1990-),女,北京人,碩士研究生,(E-mail)512692688@qq.com。通訊作者:黃東巖(1976-),男,長春人,教授,博士,(E-mail)171228198@qq.com。
基金項目:“十二五”農村領域國家科技計劃項目(2014BAD06B03);長春市科技計劃項目(14KG087); 吉林省省級糧食生產發展專項(2014-2015)
收稿日期:2015-08-13
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
