雙繞組永磁容錯電機矢量控制系統研究
2016-04-07 10:27:54李小慶朱景偉孫軍浩曹林柏周博文
電工技術學報 2016年5期
關鍵詞:故障
李小慶 朱景偉 孫軍浩 曹林柏 周博文
(大連海事大學 大連 116026)
?
雙繞組永磁容錯電機矢量控制系統研究
李小慶朱景偉孫軍浩曹林柏周博文
(大連海事大學大連116026)
摘要針對雙繞組三相永磁容錯電機的結構,以在無故障和電機繞組開路及短路故障情況下獲得相同的輸出轉矩為目標,提出雙繞組三相永磁容錯電機的矢量控制策略。電機的每相電流采用電流滯環控制技術。利用Matlab軟件搭建了雙繞組三相永磁容錯電機矢量控制系統的仿真模型,設計調試了以TMS320LF28335 DSP為核心的硬件實驗平臺,仿真和實驗結果證明了該矢量控制策略的正確性。
關鍵詞:雙繞組永磁容錯電機故障矢量控制
Study on the Vector Control System for Dual Winding Fault-Tolerant Permanent Magnet Motors
LiXiaoqingZhuJingweiSunJunhaoCaoLinbaiZhouBowen
(Dalian Maritime UniversityDalian116026China)
AbstractBased on the structure of the dual winding fault-tolerant permanent magnet (FTPM) motor,for the objective of same output electromagnetic torque in both no fault and open or short circuit fault conditions within motor windings,the vector control strategy for the dual-winding motor control system is derived.The hysteresis current control technology is used in each phase current of the motor.The MATLAB simulation model of the dual winding FTPM motor drive is built,and the hardware experiment platform based on TMS320LF28335 DSP is established.The correctness of the proposed vector control strategies for the dual winding FTPM motor drive is verified by the simulation and experiment results.
Keywords:Dual-winding,fault-tolerant permanent magnet motor,fault,vector control
0引言
永磁容錯電機是永磁同步電機與開關磁阻電機相結合的新型電機,由于其可靠性高、容錯性能好,廣泛應用于機車牽引、航空航天、船舶運輸、壓縮機組等領域[1-3],這些領域不僅要求電機的可靠性和工作效率要高,而且要求供電直流母線的電流諧波含量要小[4,5]。為實現這一目標,一些學者將兩個相同的永磁容錯電機(FTPMM)共軸連接,每個電機采用獨立的供電電源、控制器和反饋系統,既可獨立工作,也可同軸驅動負載,當其中任意一臺電機出現故障而無法運行時,另一臺電機也能夠繼續帶載工作,當出現電源失效、控制器故障以及反饋系統故障等嚴重故障時也不會使整個系統完全癱瘓[6]。雖然這種方法在一定程度上保證了電機的可靠性,但依靠兩臺電機共軸驅動,不僅增加了系統成本,而且為保證電機的可靠性及冗余度,每臺電機都不能達到額定負載運行,對電機自身也有影響[7]。為解決兩臺電機冗余結構帶來的問題,一些學者提出將兩臺永磁電機結合到一臺電機中,組成雙繞組電機結構。雙繞組三相永磁電機結構是多相電機和同步電機交叉融合的產物,在低壓大功率驅動場合受到廣泛關注[8]。近年來,許多學者對永磁同步電機的控制方法進行了較深入的研究。文獻[9-12]對同步電機如何抑制轉矩脈動以及穩定轉矩波形提出了新型算法。為使同步電機也能實現容錯控制,文獻[13]提出了六相永磁同步電機容錯控制方法,但容錯控制性能不夠理想。如果將雙繞組永磁同步電機和永磁容錯電機的優點相結合,在永磁容錯電機中采用雙繞組結構,該電機控制系統既能提高電機的利用率及可靠性,同時具有較好的容錯控制能力。
本文結合多相電機與容錯控制技術,并參照文獻[14]中六相永磁電機的設計與優化方案,提出一種雙繞組三相永磁容錯電機結構和矢量控制方法,通過控制繞組的給定電流,使該系統在開路與短路故障時,電機能夠維持正常運行,并使電機具有良好的動態和靜態性能。
1雙繞組永磁容錯電機的特點
雙繞組三相永磁容錯電機的結構如圖1所示,電機定子由兩套三相繞組組成,轉子上安裝8極表貼式永磁體。為實現物理隔離,并保證容錯電機相與相之間的磁、熱耦合程度降到最小,電機采用單層集中式繞組,而且每個定子槽只包含單個繞組。為了實現各相繞組之間的電氣隔離,電機定子的每相繞組都用H橋式拓撲結構電路作為驅動電路。H橋驅動電路也為容錯電機實現開路與短路容錯控制提供了硬件條件[15]。

圖1 雙繞組3相8極容錯電機結構圖Fig.1 Structure diagram of a dual-winding fault tolerant motor with three-phase and eight-pole
電機故障主要包括開路與短路故障,其中開路故障時繞組電流為零,使得電機產生較大的轉矩脈動,而短路故障會使電機繞組電流過大,可能會燒毀電機,并使電機產生更大的轉矩脈動。電機繞組的短路電流為
(1)
式中,E0為空載反電動勢;ωe為電角速度;Ls為繞組自感;R為繞組電阻;Is為短路電流。對于雙繞組永磁容錯電機,由于R?ωeLs,可忽略電阻影響,繞組電感與短路電流呈反比,因此增大電感可抑制短路電流。在設計永磁容錯電機時可采用深而窄的槽口,增加電機電感,抑制短路電流。
圖1為電機內部切面圖,電機共有12個槽口,電機定子采用集中式繞線方式,兩個槽口繞成一相繞組,電機分布有A、B、C、A0、B0與C0相繞組,其中A、B、C三相繞組的反電動勢波形互差120°,而且A與A0、B與B0、C與C0為同相的兩套繞組。在控制電機時,兩套繞組用兩套獨立直流電源供電,兩套驅動器驅動,即使其中的一套繞組出現故障,電機也可用另一套繞組繼續工作。
2雙繞組永磁容錯電機矢量控制策略
2.1矢量控制系統結構
目前較為先進的電機控制方式有直接轉矩控制、矢量控制等。為實現電機的容錯控制,需要雙繞組三相永磁容錯電機在開路與短路故障狀態下能夠正常運行,而直接轉矩控制在故障狀態下計算磁鏈較為困難,所以本文采用矢量控制[16]。為保證控制方便,電機采用電流滯環控制策略,直接控制電機繞組上的電流大小,保證可通過控制電機每相的電流對輸出轉矩進行控制,即使電機在開路與短路狀態下也可進行電機的轉矩分配[17,18]。
電機控制采用直軸電流Id為零的矢量控制方法,其電機輸出轉矩與交軸電流關系為
(2)
式中,ψf為轉子磁鏈;iq為交軸電流值;np為磁極對數;Te為電磁轉矩。
本電機中有兩套三相繞組,A、B、C三相繞組的反電動勢分別為eA、eB、eC,A0、B0、C0三相繞組的反電動勢分別為eA0、eB0、eC0。電機正常運行時電機反電動勢具有如下關系
eA+eB+eC=0
eA0+eB0+eC0=0
(3)
電磁轉矩為
(4)
式中,iA、iB、iC分別為A、B、C三相繞組的瞬時電流;iA0、iB0、iC0分別為A0、B0、C0三相繞組的瞬時電流;ωm為電機機械角速度。
圖2為電機矢量控制系統結構框圖。本文中雙繞組三相永磁容錯電機的兩套繞組采用兩套獨立的逆變電路,矢量控制系統采用串聯式雙余度結構,用一臺DSP作為控制器,同時用兩個獨立電源供電,為實現電機的開路與短路容錯控制提供穩定的電源保障。電機連接速度環PI調節器,根據所述給定轉矩獲得直軸電流給定值和交軸電流給定值,通過2r/2s變換和2s/3s變換后得到正常狀態下各相繞組電流給定值。連接電流檢測單元,根據三相永磁容錯電機的各相繞組電流變化判斷任一相繞組是否發生短路或開路故障。根據判斷故障結果,在電機開路與短路時,DSP重新分配電流信號,將轉矩重新分配以達到實驗效果。

圖2 電機矢量控制系統結構框圖Fig.2 Structure diagram of motor vector control system
2.2電機開路故障容錯控制方法
當電機無故障時,電磁轉矩關系式如式(4)所示。當系統出現故障時,則電機運行由對稱狀態變為不對稱狀態,此時電機將產生較大的轉矩脈動[19],為了使矢量控制在電機故障時也能適用,需要將電機故障時的不對稱運行狀態,通過矢量的疊加分解,使電機運行變為對稱狀態。圖3為雙繞組三相永磁容錯電機正常運行狀態下的電流矢量示意圖。

圖3 正常工作電流矢量圖Fig.3 Current vector diagram in normal operation
本文以電機一相開路故障為例,當電機A相繞組開路故障時,電機的電磁轉矩為
(5)
若電機按正常工作狀態下的矢量控制,計算電機各相繞組給定電流,但A相繞組電流的作用因斷路而消失,此時電機會產生較大的轉矩脈動。故可將A相繞組故障時,由于其電流缺失而產生的轉矩脈動平均分配給其他幾相繞組,用其他繞組電流產生的轉矩對其故障相的轉矩脈動進行抵消。具體方式為將A相繞組的給定電流分為3份,由其余5相繞組通過合成、疊加A相電流的作用:其中用B相和C相合成第一份電流作用,因為A、B、C三相繞組的電角度互差120°,僅需在B相和C相繞組原給定電流的基礎上,再減去1/3倍A相繞組的給定電流;用B0相和C0相繞組合成第二份電流作用,因為A、B0、C0三相繞組的電角度互差120°,只需在B0相和C0相繞組給定的基礎上,再減去1/3倍A相繞組的給定電流;用A0相繞組承擔第三份電流作用,因為A和A0同相,在A0相繞組的給定電流的基礎上,再加上1/3倍A相繞組的給定電流。圖4為開路故障時電流分配矢量圖。當A 相繞組發生開路故障時,其余5相繞組的電流給定值為
(6)
按式(6)給定的參考電流控制電機各相繞組的電流后,電機輸出的電磁轉矩就等于無故障時的輸出轉矩,而且此方法在理論上可實現消除電機開路故障所造成的轉矩脈動。此方法也可適用于其他相開路故障時對電機的容錯控制。

圖4 開路故障時電流矢量圖Fig.4 Current vector diagram in open-circuit fault condition
2.3電機短路故障容錯控制方法
對于電機繞組的一整相短路故障來說,短路故障的處理方式相對開路故障的處理方法較麻煩,不僅要將短路相繞組本應提供的電磁轉矩平均分配到其他相繞組上面,而且還要抵消短路故障相繞組自身短路時作為發電狀態所產生的制動轉矩,這也需要用其他相繞組提供相應的配合,同時電機的轉子為永磁體,其磁動勢是定值,故障相繞組處于發電狀態下,其繞組電壓和頻率與電機的轉速呈正比,但當電機轉速達到額定轉速時,即使轉速一再增加,電機的電流都保持在一定范圍內,關系式見式(1),實現短路容錯時需要實時監控繞組電流,并加入到DSP運算中,具體分配方案與實現方法如下。
這里以A相繞組短路故障為例介紹電機短路故障容錯控制方法。A相短路時,電機的電磁轉矩為
(7)
式中,ishort為A相繞組瞬時短路電流。此時,其余5相繞組需要將A相繞組正常工作時的電流作用補充上,同時抵消A相繞組短路電流的作用,電機系統才能維持平穩運行。其中要將A相繞組正常工作時電流作用補充上,其方法與開路故障的處理方法相同,即將A相繞組的給定電流分為3份,平均分配到剩余5相繞組上。此外,A相繞組的短路電流將產生阻礙轉矩,因此需要用剩下的5相繞組,產生一個與A相繞組短路電流相反的電流,抵消A相繞組短路電流所產生的阻礙轉矩。具體方法為將A相繞組的短路電流取反、并平均分為3份,用剩余5相繞組通過合成、疊加其作用:由B相和C相繞組合成第一份電流作用,因為A、B、C三相繞組的電角度互差120°,僅需在B相和C相繞組的電流給定值的基礎上,再加上1/3倍A相繞組的短路電流;由B0相和C0相繞組合成第二份電流作用,因為A、B0、C0三相繞組的電角度也互差120°,僅需在B0相和C0相繞組的電流給定值的基礎上,再加上1/3倍A相短路電流;由A0相繞組承擔第三份電流作用,因為A和A0同相,在原A0相電流給定值的基礎上,再減去1/3倍A相繞組的短路電流,圖5為短路故障時電流矢量圖。當A相繞組發生短路故障時,其余5相繞組的給定電流為
(8)

圖5 短路故障電流矢量圖Fig.5 Current vector diagram in short-circuit fault condition
式(8)中各無故障相的給定電流包括兩部分:一是補償A相繞組開路故障時電機輸出轉矩的減少;二是補償A相繞組短路電流產生的阻礙轉矩。按式(8)給定的參考電流控制電機各相繞組的電流后,電機輸出的電磁轉矩就等于無故障時的輸出轉矩,而且此方法在理論上可實現消除電機短路故障所造成的轉矩脈動。此方法也可適用于其他相短路故障時對電機的容錯控制。
3仿真驗證
為驗證本文所提出的雙繞組永磁容錯電機的容錯控制方法的正確性,采用Matlab仿真軟件對電機容錯控制方案進行仿真驗證。為保證電機控制效果較明顯,電機外加1.59 N·m的負載運行。在電機運行50 ms后,A相繞組突然發生開路故障,在無容錯控制工作20 ms后采用開路容錯控制策略對電機進行控制,電機的仿真結果如圖6~圖8所示,由仿真結果可知,電機在無故障工作時,電機轉矩脈動為3.3%,一相繞組開路故障時,轉矩脈動為14.2%,加入容錯控制方法后轉矩脈動為3.2%。電機無容錯開路運行時,正常相電流幅值增大,轉速波動變大,容錯后轉矩與轉速都趨于平穩,證明本文所述容錯控制可有效抵消轉矩脈動,穩定轉速,分配電流較合理。

圖6 單相開路故障時轉矩仿真波形Fig.6 Electromagnetic torque curve with single open circuit fault

圖7 單相開路故障時轉速仿真波形Fig.7 Speed curve with single open circuit fault

圖8 單相開路故障時電流仿真波形Fig.8 Current curve with single open circuit fault
電機在正常運行50 ms時A相繞組發生短路故障,在無容錯控制工作20 ms后,采用短路容錯控制策略進行控制,其仿真波形如圖9~圖11所示。由圖可知,電機正常工作時轉矩脈動為3.5%,進入短路故障時轉矩脈動為18.6%,用容錯控制時轉矩脈動恢復到3.8%,正常相工作電流為1.75 A,短路電流為3.4 A,通過容錯控制轉速波動也趨近穩定,因此該短路容錯方法能有效抵消轉矩脈動,使轉速趨于穩定。

圖9 單相短路故障時轉矩仿真波形Fig.9 Electromagnetic torque curve with single short circuit fault

圖10 單相短路故障時轉速仿真波形Fig.10 Speed curve with single short circuit fault

圖11 單相短路故障時電流仿真波形Fig.11 Current curve with single short circuit fault
4實驗驗證
本文使用的電機為雙繞組三相八極永磁容錯電機,該電機額定功率為0.75 kW,額定轉速為2 000 r/min,額定轉矩為3.18 N·m,額定電流為3.14 A,短路最大電流為3.60 A,電機可做短路容錯實驗。系統控制器采用數字信號控制器TMS320F28335。系統整體硬件設計平臺如圖12所示。

圖12 實驗平臺照片Fig.12 Photos the experimental setup
系統硬件平臺搭建完成后,對DSP進行編程并下載系統程序,對硬件電路進行實際的硬件調試。本實驗所用電機給定轉速均為500 r/min,為保證控制電機的電流便于觀察,電機帶有一定負載。當電機采用電流滯環矢量控制,正常運行時,電機的各項數據如圖13~圖16所示,電機的電流有效值為1.3 A,轉速為500 r/min,轉速誤差為0.5%,輸出轉矩為1.85 N·m,轉矩脈動為3.0%。

圖13 A、B、C三相繞組電流波形Fig.13 A、B、C winding current waveform

圖14 A0、B0、C0三相繞組電流波形Fig.14 A0、B0、C0 winding current

圖15 正常工作時轉速波形Fig.15 Speed waveform when normal operation

圖16 正常工作時轉矩波形Fig.16 Torque waveform when normal operation
當電機A相繞組開路故障,電機無容錯控制時,電機各項數據如圖17~圖19所示,正常相電流有效值為1.25 A,輸出轉速為500 r/min,最大轉速為517 r/min,最小轉速為483 r/min,轉速波動為3.5%,轉矩為1.57 N·m,最大轉矩為1.84 N·m,最小轉矩為1.30 N·m,轉矩脈動為17.2%。

圖17 A相開路故障運行時A、B、C三相繞組電流波形Fig.17 A、B、C winding current waveforms when phase A open-circuit fault operation

圖18 A相故障開路運行時轉速波形Fig.18 Speed waveform when phase A open-circuit fault operation
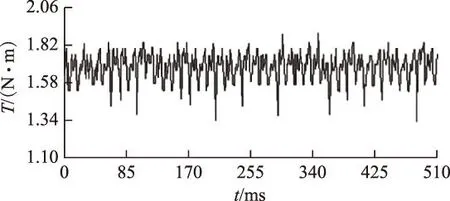
圖19 A相開路故障運行時轉矩波形Fig.19 Torque waveform when phase A open-circuit fault operation
當電機A相繞組短路故障,無容錯控制時,電機各項數據如圖20~圖22所示,正常相電流有效值為1.48 A,短路相電流為3.5 A,輸出轉速為506 r/min,最大轉速為525 r/min,最小轉速為488 r/min,轉速波動為3.5%,轉矩為1.80 N·m,最大轉矩為2.11 N·m,最小轉矩為1.48 N·m,轉矩脈動為17.6%。

圖20 A相短路故障運行時A、B、C三相繞組電流波形Fig.20 A、B、C winding current waveforms when phase A short-circuit fault operation

圖21 A相短路故障運行時轉速波形Fig.21 Speed waveform when phase A short-circuit fault operation

圖22 A相短路故障運行時轉矩波形Fig.22 Torque waveform when phase A short-circuit fault operation
電機A相繞組開路故障,采用本文的容錯控制方法時,實驗數據如圖23~圖25所示,電機平均轉矩輸出為1.62 N·m,最大轉矩為1.67 N·m,最小轉矩為1.56 N·m,轉矩脈動為3.5%,輸出轉速為500 r/min,最大轉速為510 r/min,最小轉速為490 r/min,轉速波動為2%。相對無容錯控制,電機開路故障時17.2%的轉矩脈動與3.5%的轉速波動,電機采用容錯控制后電機擁有3.5%的轉矩脈動與2%的轉速波動,電機運行更加平穩。

圖23 A相開路故障補償時A、B、C三相繞組電流波形Fig.23 A、B、C winding current waveforms when phase A open-circuit fault compensation
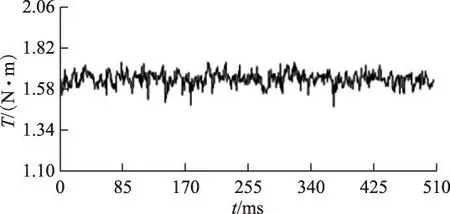
圖24 A相開路故障補償時轉矩波形Fig.24 Torque waveform when phase A open-circuit fault compensation

圖25 A相開路故障補償時轉速波形Fig.25 Speed waveform when phase A open-circuit fault compensation
電機A相繞組短路故障,采用本文的容錯控制方法時,實驗數據如圖26~圖28所示,短路故障時轉矩輸出為1.63 N·m,最大轉矩為1.70 N·m,最小轉矩為1.55 N·m,轉矩脈動為4.5%,輸出轉速為508 r/min,轉速波動為2.5%,相對無容錯控制,電機短路故障時,電機擁有17.6%的轉矩脈動和3.5%的轉速波動,電機運行更加平穩。

圖26 A相短路故障補償時A、B、C三相繞組電流波形Fig.26 A、B、C winding current waveforms when phase A short-circuit fault compensation

圖27 A相短路故障補償時轉速波形Fig.27 Speed waveform when phase A short-circuit fault compensation

圖28 A相短路故障補償時轉矩波形Fig.28 Torque waveform when phase A short-circuit fault compensation
5結論
本文主要對雙繞組永磁容錯電機開路與短路故障的容錯控制進行了研究。首先在理論上分析了電機發生開路與短路故障時所采用的容錯控制方法,并通過Matlab仿真對理論分析進行了驗證。最后運用DSP28335搭建的硬件平臺,對本文所提出的開路與短路故障容錯控制方法進行了實驗驗證。仿真與實驗結果證明,本文所提出的容錯控制方法對電機故障時的控制效果明顯,且轉矩脈動與速度波動均能達到理想的范圍內。雖然本次實驗僅做了一相繞組開路與短路故障的容錯控制策略驗證,但這種方法適應于所有的容錯電機實現多相故障容錯控制。
參考文獻
[1]郝振洋,胡育文.電力作動器用高可靠性永磁容錯電機控制系統的設計及其試驗分析[J].航空學報,2013,34(1):141-152.
Hao Zhenyang,Hu Yunwen.Design and experimental analysis on the control system of high rellability fault tolerant permanent magnet motor used in electric actuator[J].Acta Aeronautica et Astronautica Sinica,2013,34(1):141-152.
[2]Nagorny A S,Dravid N V,Jansen R H,et al.Design aspects of a high speed permanent magnet synchronous motor/generator for flywheel applications[C]//2005 IEEE International Conference on Electric Machines and Drives,San Antonio,TX,2005:635-641.
[3]Zhao Wenxiang,Cheng Ming,Chau K T,et al.Remedial injected-harmonic-current operation of redundant flux-switching permanent-magnet motor drives[J].IEEE Transactions on Industrial Electronics,2013,60(1):151-159.
[4]Sun Zhigang,Wang Jiabin,Jewell G W,et al.Enhanced optimal torque control of fault-tolerant PM machine under flux weakening operation[J].IEEE Transactions on Industrial Electronics,2010,27(1):344-353.
[5]Zhao Wenxiang,Chau K T,Cheng Ming,et al.Remedia brushless AC operation of fault-tolerant doubly salient permanent-magnet motor drines[J].IEEE Transactions on Industrial Electronics,2010,57(6):2134-2141.
[6]朱景偉,刁亮,任寶珠,等.具有冗余特性的永磁容錯電機短路故障分析與控制[J].電工技術學報,2013,28(3):80-86.
Zhu Jingwei,Diao Liang,Ren Baozhu,et al.Analysis and control of short-circuit fault in a fault-tolerant permanent magnet motor drive with redundancy[J].Transactions of China Electrotechnical Society,2013,28(3):80-86.
[7]郝振洋.六相永磁容錯電機及其控制系統的設計和研究[D].南京:南京航空航天大學,2010.
[8]齊歌.雙三相永磁同步電動機交互飽和模型與特性研究[D].武漢:華中科技大學,2010.
[9]Zhao Wenxiang,Cheng Ming,Hua Wei,et al.A redundant flux-switching permanent magnet motor drive for fault-tolerant applications[C]//IEEE Vehicle Power and Propulsion Conference,Harbin,2008:1-6.
[10]Jabbari A,Shakeri M,Navabi A.Torque ripple minimization in PM synchronous motors using tooth shape optimization[J].Majlesi Journal of Mechanical Engineering,2010(2):27-31.
[11]Hasanien H M.Torque ripple minimization of permanent magnet synchronous motor using digital observer controller[J].Energy Conversion and Management,2010,51(1):98-104.
[12]Zhu Jingwei,Ertugrul N,Soong W L.Minimum torque ripple current control strategy in a dual fault tolerant PM AC motor drive[C]//IEEE Power Electronics Specialists Conference,Rhodes,2008:1542-1547.
[13]薛麗英.六相永磁同步電動機驅動系統故障診斷與容錯的研究[D].西安:西北工業大學,2006.
[14]Zhang Xiaochen,Zhu Jingwei,Liu Qingguan.Design and optimization of a six-phase fault-tolerant permanent magnet motor[C]//2012 7th International Power Electronics and Motion Control Conference (IPEMC),Harbin,2012,2:1314-1318.
[15]Mircea R,Felicia S,Loránd S.Study of a nine-phase fault tolerant permanent magnet starter-alternator[J].Journal of Computer Science and Control Systems,2011,41:90-106.
[16]Liu Wenxin,Liu Li,Chung I Y,et al.Modeling and detecting the stator winding fault of permanent magnet synchronous motors[J].Simulation Modelling Practice and Theory,2012,27(3):1-16.
[17]朱思國,歐陽紅林,晏建玲.電流滯環控制級聯型逆變器的矢量控制[J].高電壓技術,2012,38(5):1260-1266.
Zhu Siguo,Ouyang Honglin,Yan Jianling.Vector control based on current hysteresis for cascaded inverter[J].High Voltage Engineering,2012,38(5):1260-1266.
[18]王偉,程明,張邦富,等.電流滯環型永磁同步電機驅動系統的相電流傳感器容錯控制[J].中國電機工程學報,2012,32(33):59-66+176.
Wang Wei,Cheng Ming,Zhang Bangfu,et al.Phase current sensor fault tolerant control of current hysteresis type for permanent magnet synchronous motor drive system[J].Proceedings of the CSEE,2012,32(33):59-66+176.
[19]Gopalakrishnan S,Omekanda A M,Lequesne B.Classification and remediation of electrical faults in the switched reluctance drive[J].IEEE Transaction on Industry Applications,2006,42(2):479-486.
李小慶男,1990年生,碩士研究生,研究方向為永磁容錯電機控制技術。
E-mail:li827702336@126.com
朱景偉男,1963年生,博士生導師,研究方向為永磁電機及控制、新能源變換技術。
E-mail:zjwdl@dlmu.edu.cn(通信作者)
作者簡介
中圖分類號:TM351
收稿日期2015-01-09改稿日期2015-12-09
國家自然科學基金(51077007)和遼寧省科學技術計劃(2011224004)資助項目。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
