風干擾引起的飛行器附加攻角和附加側滑角計算方法
2016-04-10 07:19:16李爭學賀元軍張廣春李杰奇
導彈與航天運載技術 2016年5期
李爭學,賀元軍,張廣春,李杰奇,張 永
(1. 中國運載火箭技術研究院研究發展中心,北京,100076;2. 中國載人航天工程辦公室,北京,100720)
風干擾引起的飛行器附加攻角和附加側滑角計算方法
李爭學1,賀元軍2,張廣春1,李杰奇1,張 永1
(1. 中國運載火箭技術研究院研究發展中心,北京,100076;2. 中國載人航天工程辦公室,北京,100720)
研究了標稱無側滑飛行基礎上受到水平風干擾時的飛行器附加攻角和附加側滑角計算方法,完善了導彈與運載領域長期、廣泛使用的傳統的簡化計算公式,修正了最大附加攻角和附加側滑角出現條件的工程經驗。提出了標稱無側滑飛行基礎上受到水平風干擾時的飛行器附加攻角和附加側滑角計算方法、水平風方向任意時附加攻角和附加側滑角最大和最小值計算方法、傾側角任意時附加攻角和附加側滑角最大和最小值計算方法、水平風方向和傾側角均任意時附加攻角和附加側滑角最大和最小值計算方法,這些方法比航天傳統方法使用范圍更廣、更準確,數值算例驗證了其正確性。
風干擾;附加攻角;附加側滑角
0 引 言
風干擾對大氣層內飛行器有顯著影響,飛行器的彈道、制導、控制、載荷等多專業的分析和設計工作一般都需要考慮風干擾影響[1~8]。對于主要依靠大推力發動機進行控制的傳統運載火箭,發動機控制能力極強,完全可以抵消風干擾的影響,一般不存在發動機控制能力不足、風干擾導致失控的問題。而對于控制能力較弱或控制手段不豐富的飛行器,尤其是主要依靠偏轉范圍有限的氣動舵和較小的姿態控制發動機進行控制的先進面對稱飛行器,比如典型的HTV-2,在大攻角飛行階段或者大風區飛行時控制力矩與風干擾的強弱相當,沒有明顯優勢,風干擾的影響極為嚴酷,較大的風干擾極可能導致飛行失敗。因此,深入研究風干擾對飛行器的影響對于現代很多飛行器極為關鍵。
風干擾對飛行的直接影響主要體現在有風時實際飛行攻角、側滑角和馬赫數與無風時不一致。攻角、側滑角、馬赫數的改變進一步引起氣動力和力矩的改變,最終造成姿態改變以及相應的閉環情況下對操縱機構需求的改變,同時產生作用在飛行器上的氣動載荷,對機體結構產生影響。當控制需求超過操縱機構的最大能力時,飛行器便會失控;當載荷超出飛行器結構承受能力時便會解體。
根據航天工程經驗,對于高超聲速飛行器,風干擾引起的飛行攻角和側滑角的改變,也就是附加攻角和側滑角,對飛行影響更為顯著,而馬赫數變化的影響則相對次要。因此本文主要關心風干擾——特指航天領域關心更多的水平風引起的附加攻角和側滑角的計算問題,這是深入分析風干擾對飛行器各系統影響的第1步。
按照中國目前仍在廣泛使用的航天傳統經驗,在設計初期進行控制能力評價時,或者在載荷計算中,水平風引起的附加攻角和附加側滑角按照下式計算[1]:
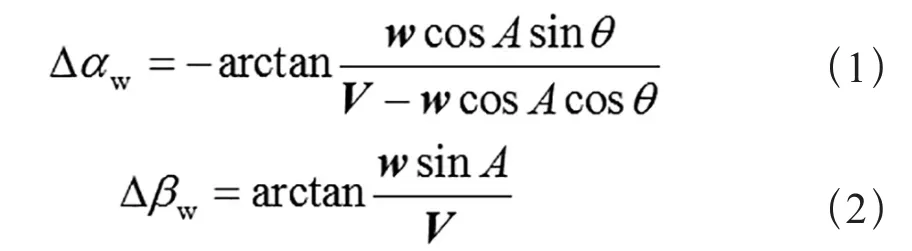
式中 Δαw和Δβw分別為風干擾引起的附加攻角和附加側滑角;θ為彈道傾角;V為飛行器速矢量;A為風速方向和射面的夾角;ω為風速矢量。并且目前的工程經驗認為在水平風的所有方向中,最大側滑角發生在風速與射面垂直的情況,即A=±π/2的情況。
對于傳統的簡化式(1)和式(2),其被廣泛采用的主要原因是服從于火箭運動方程簡化的目的,即把多維非線性空間小擾動運動分解為互相獨立的平面運動,即縱向擾動運動和側向擾動運動,使問題變得容易求解。同時火箭有一個對稱面,在客觀上存在著運動方程簡化的可能性。所以傳統的附加攻角和附加側滑角的簡化計算公式有它存在的必要性。
客觀上,作為傳統經驗的式(1)和式(2)只是近似公式,具有特定的適用范圍,超過該范圍后誤差可能難以接受(例如在火箭起飛段,風速與火箭速度非常接近情況下)。式(1)只適用于零傾側角飛行的情況,式(2)只適用與零傾側角飛行并且風速遠小于飛行器地速的情況,大傾側角或風速較大的情況下,式(1)和式(2)誤差較大,具體參見2.2節算例。同樣,在大傾側角或風速較大情況下,工程經驗給出的最大側滑角及其發生條件與實際情況也相差顯著,具體參見3.2節算例。
本文給出了飛行器在標稱無側滑飛行基礎上受到水平風干擾時的附加攻角和附加側滑角準確計算公式,比航天領域目前仍在廣泛使用的式(1)、式(2)更準確并且應用范圍更廣;同時在標稱無側滑飛行的前提下,給出了水平風方向任意、傾側角任意、兩者均任意時附加攻角和附加側滑角最大和最小值計算方法及對應的最值出現條件,也比航天傳統工程經驗更準確并且應用范圍更廣。
1 附加攻角和附加側滑角計算需求
本文研究了飛行器在標稱無側滑(即β=0)飛行的基礎上受到水平風干擾時附加攻角、附加側滑角計算問題和最大附加攻角、最大附加側滑角確定,具體如下:
a) 給 定V、θ、ν、α、ω和A,計 算ΔαW和ΔβW;
b)A任意,給定V、θ、ν、α和ω,確定ΔαW和ΔβW的最大值和對應的A;
c)V任意,給定V、θ、α、ω和A,確定ΔαW和ΔβW的最大值和對應的ν;
d)A、ν均任意,給定V、θ、α和ω,確定ΔαW和ΔβW的最大值和對應的A和ν。
附加攻角和附加側滑角計算需求意義為:a)標稱零側滑飛行狀態和風矢量均確定情況下的附加攻角和附加側滑角計算;b)飛行器無明顯姿態機動進行穩定的標稱無側滑飛行的條件下不確定的風向可能產生的最惡劣影響;c)飛行器在進行標稱無側滑快速傾側機動的過程中確定的風矢量可能產生的最惡劣影響;d)飛行器在進行標稱無側滑快速傾側機動過程中不確定的風向可能產生的最惡劣影響。實際工程中沿飛行剖面的風向是否確定取決于沿途風場本身特點以及飛行器任務具有單一性還是呈現多樣性。
本文中的風向與射面的夾角A定義為飛行器地速矢量與風矢量之間的夾角(見圖1),即:

式中 σw為風向角;σ為彈道偏角。
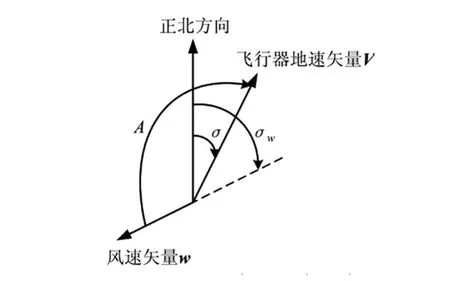
圖1 風向與射面夾角示意
2 飛行狀態下附加攻角和附加側滑角計算
2.1 附加攻角和附加側滑角計算
根據半速度坐標系的定義[2]以及夾角A的定義可知,水平風的風速在半速度坐標系中的矢量描述為

式中 上標(H)為矢量在半速度坐標系中描述。進一步由半速度系到飛行器體坐標系的轉換關系[2]可得風速在體坐標系中為

式中 上標(b)為矢量在體坐標系中描述。
從而風干擾影響下飛行器的空速在體坐標系中的描述,即:

式中 V(b)=[VxVv0]飛行器地速在體坐標系中的分量。根據從速度坐標系到飛行器本體坐標系的轉換關系[2],在標稱零側滑(β=0)飛行狀態下,有:

標稱攻角α滿足:

有風干擾時,攻角αw和側滑角βw滿足[2]:

式中 VT為空速VT的大小。
由式(8)和式(9)可得,風引起的附加攻角Δαw滿足:

結合式(5)和式(11),并經過整理可得:

式(12)中κ=ω/V為風速大小與飛行器地速大小的比值。
由式(10)得風引起的附加側滑角Δβw滿足:

式(12)和(13)即為飛行器標稱零側滑飛行狀態和水平風矢量均確定情況下附加攻角和附加側滑角的準確計算公式。
當時式1+κ2-2κcosAcosθ=0(13)無意義,1+κ2-2κcosAcosθ=0而等價于風速與飛行器地速矢量重合,且合成后的飛行器空速為0,此時討論攻角和側滑角沒有意義,因此本文不考慮這種情況。同時,本文也不考慮κcosθ≥1(即風速可能使飛行器空速與地速反向)的異常情況,這種情況一般只可能發生在飛行器水平起飛初始短暫時間或者水平降落基本結束時。
2.2 與傳統工程計算方法對比
由文獻[1]給出的傳統工程計算公式(1)和本文給出的公式(12)對比可知,當且僅當傾側角為零時,式(1)與式(12)一致,因此,式(1)只適用于零傾側角飛行狀態。大傾側角時,式(1)不再適用。(見圖3)
由文獻[1]給出的傳統工程計算公式(2)和本文給出的公式(13)對比可知,當傾側角為零且飛行器飛行地速遠大于風速時,式(2)與(13)近似一致,式(2)為附加側滑的近似計算公式,式(2)的計算誤差隨κ的增大而增大(見圖2);當傾側角較大時,式(2)不再適用(見圖3)。
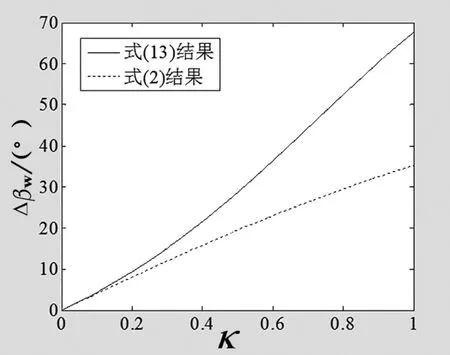
圖2 式(2)與式(13)比較結果
圖2給出了v=0 rad、θ=0 rad、A=π/4 rad情況下式(2)與(13)的比較。圖3給出了v=π/3 rad、θ=0 rad、 A=π/4 rad情況下式(1)和(2)與式(12)、(13)的比較。
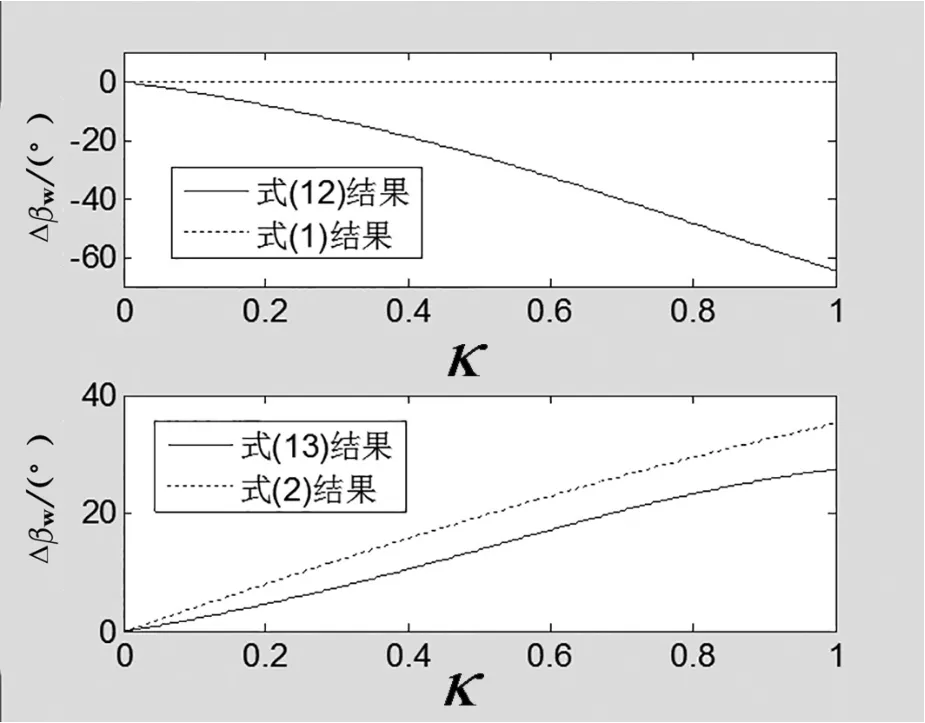
圖3 式(2)與式(13)比較結果
綜上,本文給出的附加攻角和附加側滑角計算公式為任意飛行狀態下的準確計算公式。而文獻[1]給出的附加攻角計算公式為零傾側角情況下的準確計算公式,只適用于近似零傾側角飛行情況,大傾側角時不適用;文獻[1]給出的附加側滑角計算公式為零傾側角情況下的近似計算公式,只適用于近似零傾側角且風速遠小于飛行器地速的情況。
3 任意水平風向下最大附加攻角和附加側滑角分析
本節給出飛行器在確定的標稱零側滑飛行基礎上受到的水平風向任意時可能產生的附加攻角和附加側滑角最大、最小值。
3.1 附加攻角最大、最小值分析

由式(14)可得:


式中 A*和v*分別為附加攻角或附加側滑角取最值時A和V的值。
下面分析式(16)和式(17)對應的Δαw的最大值和最小值。當A*取式(16)時,代入式(12)可得:

故當A*取式(16)時,Δαw*<0為Δαw的最小值。
當A*取式(17)時,代入式(12)可得:

故當A*取式(17)時,Δαw*>0為Δαw的最大值。
在傾側角為零時,Δαw取最值的條件為A*=0或A*=π與通常的工程經驗一致。在傾側角不為零時,通常的工程經驗偏差較大。
3.2 附加側滑角最大、最小值分析

式(20)為附加側滑角取最值的條件。
一般情況下式(20)無解析解。當v=0時,式(20)簡化為

求解方程(21)可得:

將式(22)代入式(13)可得的最值為

當式(22)右邊取“+”號時,式(23)取“+”號,Δβw達到最大值;反之,Δβw達到最小值。
在κ<<1也就是水平風速遠小于飛行器地速的情況下,式(22)近似為A*≈±π/2,這與通常的工程經驗一致。否則,通常的工程經驗偏差較大(如圖4、圖5所示)。
圖4給出了ν=0 rad、θ=0 rad時由式(23)給出的Δβw最大值與由工程經驗確定的Δβw最大值A=π/2 rad時式(2)給出的Δβw的值的比較。圖5給出了ν=π/3 rad、θ=0.1 rad時由式(23)給出的Δβw最大值與工程經驗確定的最大值的比較。
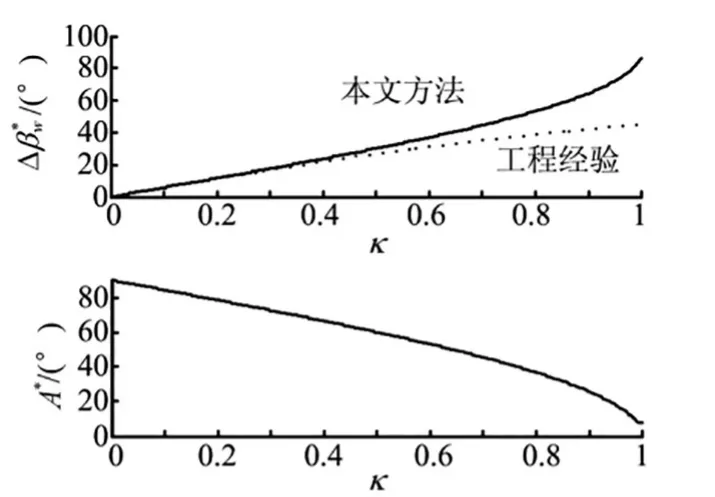
圖4 ν=0 rad時本文與工程經驗給出的Δβw最大值差別
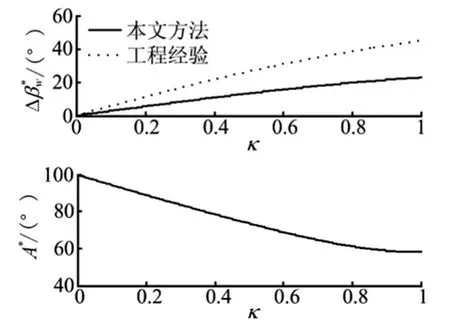
圖5 ν=π/3 rad時本文與工程經驗給出的Δβw最大值差別
4 任意傾側角下最大附加攻角和附加側滑角分析
本節給出確定的水平風矢量下飛行器在標稱零側滑任意傾側角飛行時可能產生的附加攻角和附加側滑角最大、最小值。記:

根據式(12)和式(13),并由簡單的三角函數知識可得:
a)當:

或:

時附加攻角取得最值,最小、最大值分別為
b)當:

或:

時附加側滑角取得最值,最大、最小值分別為
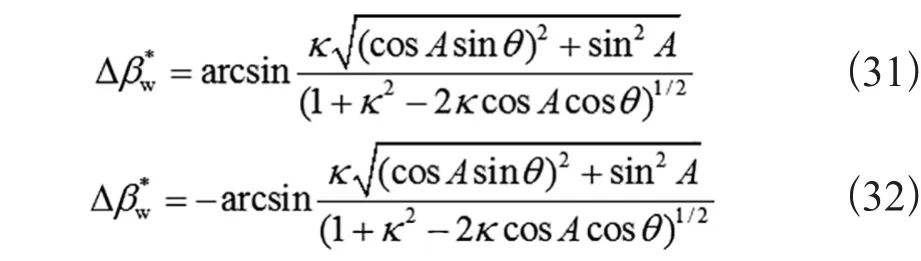
5 任意傾側角和任意水平風向下最大附加攻角和最大附加側滑角分析
本節給出水平風的方向和飛行器標稱零側滑飛行的傾側角均任意時可能產生的附加攻角和附加側滑角最大、最小值。
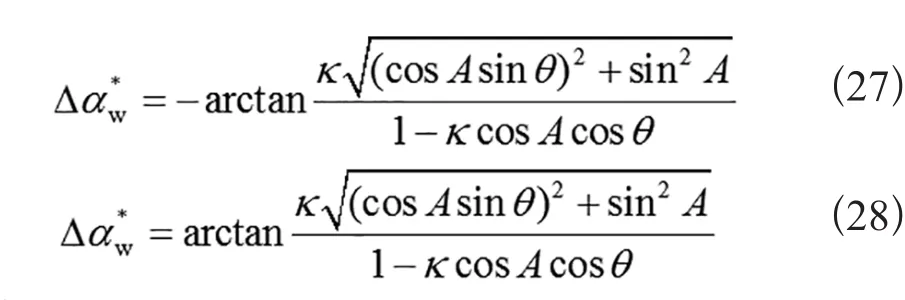
式(27)、式(28)、式(31)、式(32)描述了風矢量固定、傾側角任意時附加攻角和附加側滑角的最值,進一步,式(27)、式(28)、式(31)、式(32)關于風向A的最值即為風向和傾側角均任意時附加攻角和附加側滑角的最值。
5.1 附加攻角最大、最小值分析

式(33)存在解A*=0,以及A*=π

式(34)在cosθ≥κ條件時成立。
將A*=0和A*=π代入式(28)檢驗可知A*=0時Δαw*比A*=π時大,因此下文不考慮A*=π。
當A*=0時,由式(24)、式(25)和式(27)可得:
A*=0時,由式(24)、式(26)和式(28)可得
當A*取式(34)時,由式(24)、式(25)和式(34)可得:
A*取式(34)時,由式(24)、(26)和(34)可得:
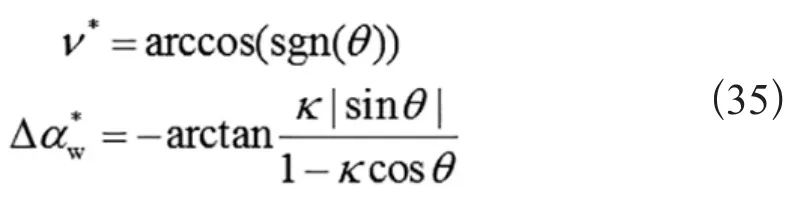
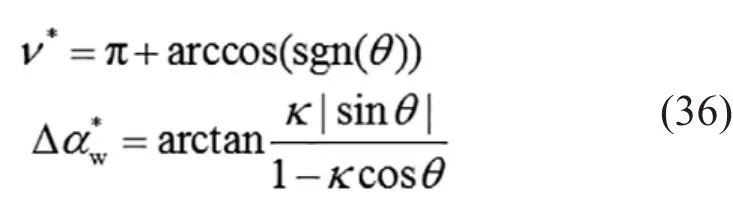
a)若κ>cosθ,則附加攻角最小值按式(35)計算,最大值按式(36)計算;
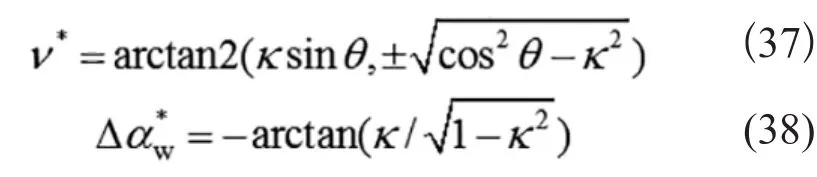
b)若κ≤cosθ,則附加攻角最小值按式(38)計算,最大值按式(40)計算。
5.2 附加側滑角最大、最小值分析

式(41)存在解A*=0、A*=π和以下解:

式(42)與式(34)一致,在cosθ≥κ條件時成立,式(43)在κcosθ≥1條件時成立,不在本文考慮范圍內。
將A*=0和A*=π代入式(31)檢驗可知A*=0時Δβw
*比A*=π時大,因此下文不考慮A*=π。
當A*=0時,由式(24)、式(29)和式(31)可得:
當A*=0時,由式(24)、(30)和(31)可得:
當A*取式(42)時,由式(24)、(29)和(31)可得:
當A*取式(42)時,由式(24)、(30)和(32)可得:

經簡單的代數運算可知:

式(52)中等號成立當且僅當κ=cosθ。綜上:
a)若cosθ<κ,則附加側滑角最大值按式(45)計算,最小值按式(47)計算;
b)若cosθ≥κ,則附加側滑角最大值按式(49)計算,最小值按式(51)計算。
6 數值驗證
本節采用幾個特例驗證本文方法的正確性。驗證方法為把本文公式計算結果與根據恒等關系式(8)~式(10)計算的精確結果進行比較,兩種結果一致則說明本文方法正確。
表1給出了隨機選取的幾組數據下的式(12)、式(13)結果與精確結果的比較。
圖6和圖7給出了κ=0.1、θ=-0.3 rad、v=0.7 rad情況下風向任意時式(17)、式(19)、式(20)所得ΔαW和ΔβW最大值及出現條件與采用式(8)~(10)精確方法進行數值遍歷結果的比較。
圖8和圖9給出了κ=0.1,θ=-0.3 rad,A=0.7 rad情況下傾側角任意時式(26)、(28)、(29)、(31)所得Δαw和Δβw最大值及出現條件與采用精確方法進行數值遍歷結果的比較。
圖10和圖11分別給出了κ=0.1、θ=0.3 rad情況下風向和傾側角任意時式(42)~(51)所得Δαw和Δβw最大值與精確方法數值遍歷結果的比較。
圖6~圖11中,水平虛線與豎直虛線的交點為本文方法所給附加攻角和附加側滑角的最大值點和最大值大小,實線曲線或曲面為精確方法遍歷結果。
由表1可知中精確結果與本文方法結果完全一致,驗證了本文方法所給結果與精確結果的一致性。
圖1~圖6表明3種情況下本文方法給出的附加攻角和附加側滑角最大值及出現條件與精確方法數值遍歷結果均完全一致,因而驗證了本文方法給出的3種情況下附加攻角和附加側滑角最大值及出現條件的正確性。

表1 ΔαW和ΔβW精確值與本文方法所給值比較
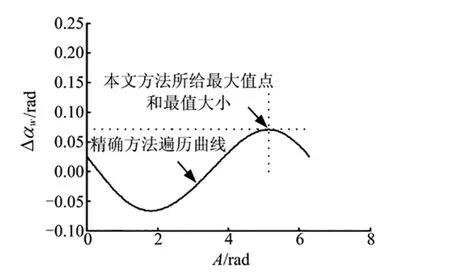
圖6 式(17)、式(19)所給ΔαW最大值與數值遍歷結果比較
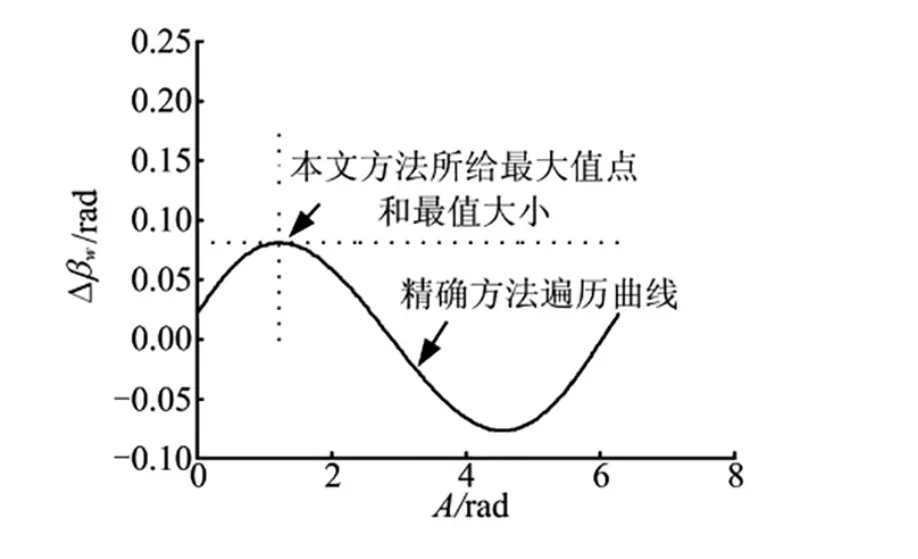
圖7 式(20)所給ΔβW最大值與數值遍歷結果比較
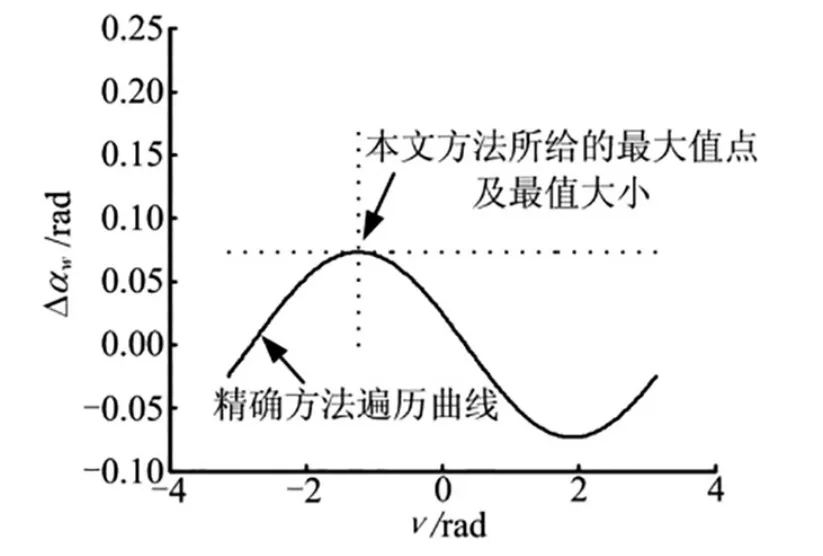
圖8 式(26)、式(28)所給ΔαW最大值與數值遍歷結果比較

圖9 式(29)、式(31)所給ΔβW最大值與數值遍歷結果比較
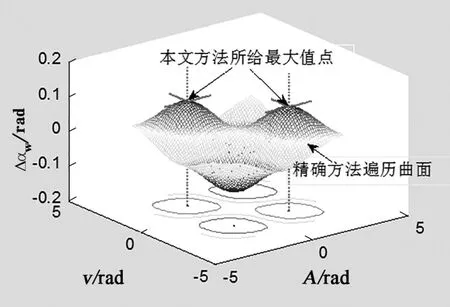
圖10 式(34)、(39)、(40)所給ΔαW最大值與數值遍歷結果比較
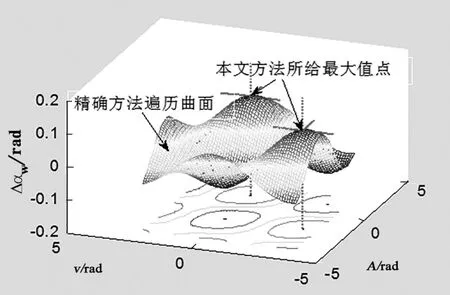
圖11 式(42)、(46)、(47)所給ΔβW最大值與數值遍歷結果比較
7 結 論
本文研究了水平風干擾下附加攻角和附加側滑角的計算問題,得到如下結論:
a)給出了確定飛行狀態和確定水平風矢量下附加攻角和附加側滑角的準確計算公式,適用于一般情況,比航天傳統計算公式更準確且適用范圍更廣;
b)給出了水平風方向任意、傾側角任意、兩者均任意時可能產生的附加攻角和附加側滑角最大、最小值及出現條件,比航天傳統工程經驗更準確且適用范圍更廣;
本文結果具有工程實用性,可為傳統與運載火箭以及先進高超聲速飛行器的總體設計、控制分析和載荷計算等工作提供更準確的輸入條件,提高新研制飛行器設計的可靠性和魯棒性,對于成熟飛行器,可以基于本文結果更準確地評估其安全裕量。
[1] 徐延萬. 液體導彈與運載火箭系列——控制系統(上)[M].北京: 中國宇航出版社, 2005.
[2] 趙漢元. 飛行器再入動力學和制導[M].長沙: 國防科技大學出版社, 1997.
[3] 雷旭升, 陶冶. 小型無人機風場擾動自適應控制方法[J]. 航空學報, 2010, 31(6):1171-1176.
[4] Augiar A P, Hespaha J P, Kokotovic P V. Path-following for nonminimum phase systems removes performance limi-tations[J]. IEEE Transactions on Automatic Control, 2005, 50(2):234-239.
[5] Park S, Deyst J, How J P. A new nonlinear guidance logic for trajectory tracking[R]. AIAA-2004-4900,2004.
[6] 劉剛, 王行仁, 賈榮珍. 綜合自然環境中變化風場的工程仿真方法[J]. 系統仿真學報, 2006, 18(2): 297-300.
[7] 胡孟權, 張登成, 董彥非等. 高等大氣飛行力學[M].北京: 航空工業出版社, 2007.
[8] 彭騰飛. 重復使用運載器無動力自動著陸與制導技術研究[D].南京航空航天大學碩士學位論文, 2013.
Calculation of the Additional Attack Angle and the Additional Sideslip Angle of Craft Caused by Wind Disturbance
Li Zheng-xue1, He Yuan-jun2, Zhang Guang-chun1, Li Jie-qi1, Zhang Yong1
(1. Research and Development Center, China Academy of Launch Vehicle Technology, Beijing, 100076; 2. China Manned Space Agency, Beijing, 100720)
This paper studies the method of calculating additional attack angle and additional sideslip angle caused by wind disturbance based on zero-sideslip nominal flight. The results in this paper are perfect over the simplified formulae widely used in China aerospace engineering. Formulae are given for calculating additional angle of attack and additional sideslip angle for given zero-sideslip nominal flight state and wind disturbance. Formulae about the maximum and the minimum values of additional angle of attack and additional sideslip angle under different conditions are also given. These results are more accurate and more widely used than the traditional method and the engineering experience. Numerical results verified the correctness of the results. Results in this paper can be used for more properly determining inputs of other works during vehicle design, thus improving reliability and robustness of new vehicle. For vehicles in use, the results can also help in evaluating security margins more accurately.
Wind disturbance; Additional attack angl; Additional sideslip angle
V414.33
A
1004-7182(2016)05-0066-08
10.7654/j.issn.1004-7182.20160515
2014-12-12;
2015-06-01
李爭學(1979-),男,高級工程師,主要研究方向為飛行器動力學與姿態控制
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
人大建設(2019年12期)2019-05-21 02:55:32
太空探索(2016年6期)2016-07-10 12:09:06
西南交通大學學報(2016年4期)2016-06-15 20:29:37
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
電網與清潔能源(2015年3期)2015-02-28 16:03:31
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
筑路機械與施工機械化(2014年4期)2014-03-01 02:58:34