坡耕地運輸車爬坡性能
2016-04-11 17:20:54孟長伊莊麗娜楊海天李廣宇
江蘇農業科學 2016年2期
孟長伊++莊麗娜+++楊海天+++李廣宇

摘要:分析了不同分類下的坡耕地機械使用界限及特性。對四輪、兩輪、履帶型、六輪型運輸車的爬坡性能進行了比較,計算了4種運輸車的推力系數。通過推力比,求出不同類型運輸車在不同情況下的爬坡極限角,并對它們的爬坡性能進行了推算。
關鍵詞:坡耕地;爬坡;性能
中圖分類號: S222.5文獻標志碼: A文章編號:1002-1302(2016)02-0418-02
收稿日期:2015-02-05
基金項目:吉林省農業機械研究院項目(編號:201407001)。
作者簡介:孟長伊(1971—),女,吉林長春人,碩士,高級工程師,主要從事農業工程、農業技術研究。E-mail:1006946222@qq.com。坡耕地是指與水平地面呈一定角度的旱耕地。除坡度問題外,坡耕地普遍具有溫度低、水利條件差、土壤不良等問題,水土流失嚴重[1]。因此,坡耕地農業普遍比平地農業的勞動生產率低,因作業種類不同而異,其中運輸作業的效率最低,勞動強度也明顯增大。通用型手扶拖拉機在安全、操縱、爬坡性能上是不完善的,近年來,開發專用坡耕地機械已成為中國農業工程界的研究重點。目前出現了坡耕地專用運輸機械,性能也在不斷提高;但目前國內有關坡耕地機械的研究較少,相關產品的研發還處于起步階段。國外有關坡耕地機械的研究處于前沿,向全功能、微型化方向發展,以意大利Ferrari系列微型拖拉機為代表。因此,配合目前的農藝模式,研究易操作、穩定性好、爬坡能力強的坡耕地專用運輸車,具有重要意義[2]。本研究針對坡耕地運輸車在不同角度、地況上的爬坡性能進行理論探討,以期為研發專用坡耕地運輸車提供參考。
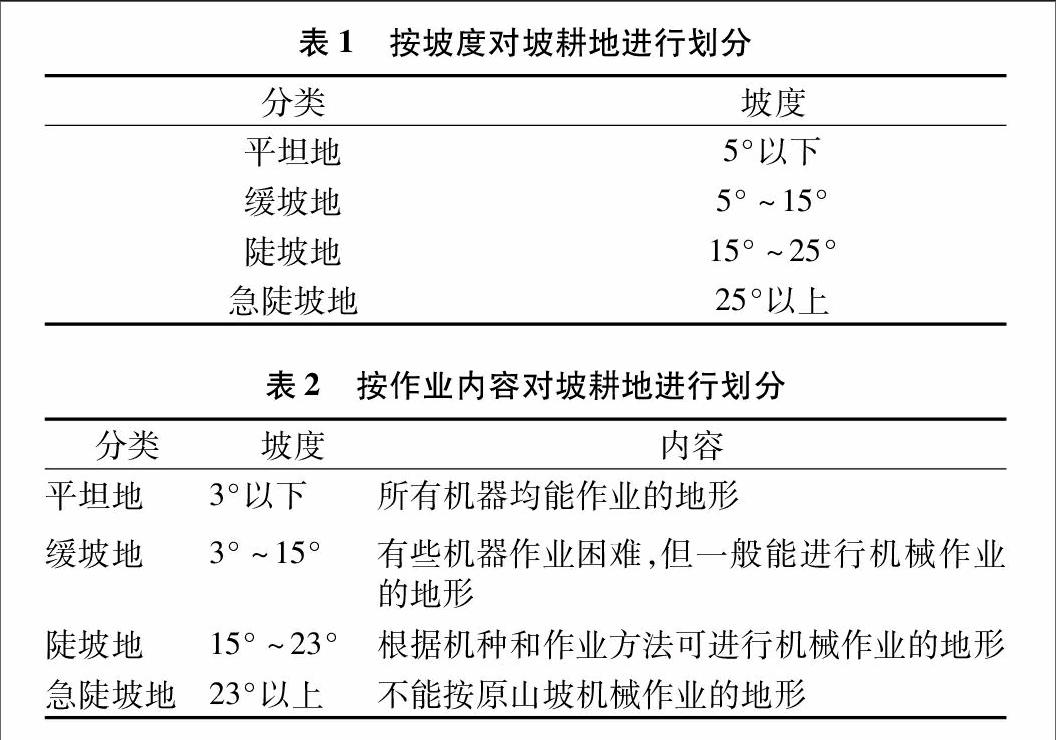
1坡耕地分類和坡度界限
根據目前坡耕地生產的農藝要求,按照不同情況對坡耕地進行劃分(表1、表2)。
分類坡度內容平坦地3°以下所有機器均能作業的地形緩坡地3°~15°有些機器作業困難,但一般能進行機械作業的地形陡坡地15°~23°根據機種和作業方法可進行機械作業的地形急陡坡地23°以上不能按原山坡機械作業的地形
平地農業機械在坡耕地利用界限見表3;不同耕作方式下坡耕地用農機作業坡度界限見表4。
表3平地農業機械在坡耕地利用界限
分類坡度內 容14°以下和平地一樣進行作業24°~8°機器性能稍有下降,熟練的操作者可用平地機器進行作業38°~12°須要對平地機器進行改裝,且需要熟練的操作者才能進行作業412°以上利用平地機器有困難。機器須要改裝,有時還要設置坡地用特殊裝置
表4不同耕作方式下坡耕地用農機作業坡度界限
耕作方式作業機種坡度界限犁耕犁6°以上時不易完全翻轉圓盤犁耕偏置圓盤耙、重型耙超過7°時效率降低旋耕手扶式旋耕機(牽引式)沿等高線方向的作業界限為6°,6°以上按爬坡、下坡方向牽引,但功效顯著下降旋耕機(懸掛式)15°左右則作業困難
2坡耕地運輸的特性分析
2.1坡地上機械的特性
在坡地上作業的農業機械以輪式、連續作業為主,牽引力小。根據調研結果,實地耕作都是按農藝要求,采用等高線方向作業,作業時的主要問題是拖拉機的橫向側翻,關于該問題已經進行了很多研究[3]。在較硬土地上試驗時,隨著地面坡度增大,牽引力下降(表5)。
表5牽引力隨坡度變化幅度
坡度牽引力下降幅度(%)10°10~2015°30~5020°50~70注:表中數據是以干燥土壤為例;如在潮濕或松軟地面上,牽引力下降幅度更大。
2.2特性分析
由于機體傾斜,坡下側和坡上側驅動輪上的質量分配不等,因而減少推進力。在坡地上車輪的橫向滑移一直是難以解決的問題。為使拖拉機沿等高線方向前進,須要計算運輸車的機體偏角和前輪操舵角。把車輪上一部分推進力變成行走阻力,防止橫向滑移[4];沿上坡、下坡方向作業時利用從行走裝置中產生的推進力來克服行走阻力。
3.3橡膠履帶運輸車或多輪型運輸車
履帶型運輸車和六輪車一樣,由于重心位置不同,推力系數也隨之不同。其穩定性尤其重要,容易發生滑移和側翻,在平地履帶型車的極限推力系數為0.74以下,六輪驅動車的極限推力系數在0.86以下,說明它較適合在松軟地使用。近年來,有學者進行履帶式微型拖拉機的研究,采用機、電、液一體化技術,設計了液壓調平裝置,使履帶式運輸車的爬坡極限得到提高,最高可達23.9°[6]。
4結語
本研究表明,在10 ℃以下坡地可以使用行駛速度高、價格便宜的平地拖拉機作為運輸工具;在10°~20°坡地宜用坡地用乘用型運輸車;在20°以上的超陡坡應考慮應用無人駕駛運輸。在10°~20°坡地,采用四輪驅動可充分發揮其爬坡性能。對于橡膠履帶型車和六輪驅動車,通過附加配質量使車輛接地壓力分布均勻,來設定機體的荷質量分配,則其推力系數比四輪驅動型車大。必須注意的是,θ0是根據車輪的推進力計算出的爬坡極限角,有時即使在θ0以下的坡度,有些車輛也會出現側翻。
參考文獻:
[1]姜心祿,池忠志,李旭毅,等. 發展丘陵山地農機化存在的問題與對策[J]. 中國農機化,2012(6):12-14.
[2]張娟利,師帥兵. 拖拉機行走機構的研究現狀[J]. 農機化研究,2010,5(5):243-246.
[3]楊羅成. 農用運輸車車架動靜態有限元分析[D]. 蘭州:甘肅農業大學,2008.
[4]高斯. 車輛動力學穩定系統仿真及優化[D]. 武漢:華中科技大學,2006.
[5]張戰文. 微型履帶山地拖拉機穩定性能研究[D]. 楊凌:西北農林科技大學,2011.
[6]董新建. 履帶車輛行動部分動力學分析與仿真[D]. 長沙:湖南大學,2007.孫愛東,尹令,石凱歌,等. 基于RFID的群養種鵝個體產蛋記錄方法[J]. 江蘇農業科學,2016,44(2):420-423.
