新概念穿梭艇自航模操控系統試驗研究
2016-04-18 01:41:38王健劉旌揚魏成柱李英輝易宏
中國艦船研究 2016年1期
王健,劉旌揚,魏成柱,李英輝,易宏
上海交通大學海洋工程國家重點實驗室,上海200240
?
新概念穿梭艇自航模操控系統試驗研究
王健,劉旌揚,魏成柱,李英輝,易宏
上海交通大學海洋工程國家重點實驗室,上海200240
摘要:自航模試驗是研究船舶性能的有效手段。針對新概念穿梭艇,設計一種自航模操控系統。該系統包括岸上操控系統和船載自航控制系統2部分,利用無線局域網完成岸上操控系統與船載自航控制系統之間的通信;執行機構配備傳感器獲取反饋數據,驅動器采用成熟的可編程元件;使用Python語言編寫下位機和上位機軟件。將系統成功應用于新概念穿梭艇的自航模試驗中,試驗表明所設計的自航模操控系統可以減小開發工作量,操作方便,可擴展性和可移植性強,能夠反映新概念穿梭艇的操縱性能。最后經與船模拖曳水池試驗結果進行對比,證明所設計系統應用于自航模試驗時能夠有效獲取可靠數據。
關鍵詞:穿梭艇;自航模;操控系統
0 引 言
近年來,高性能排水型船(如常規高速雙體船、小水線面雙體船、穿浪雙體船、三體船、多體船、高性能排水型穿浪單體內傾船型等)逐漸成為新的研究方向。在高性能排水型穿浪單體內傾船型方面,美國和英國分別建造了DDG 1000“朱姆沃爾特”級驅逐艦和VSV“極細長艇”[1]。這些高性能船與傳統排水型船相比,具有高速、高平穩性等優勢。
本文所涉及的新概念穿梭艇就是針對惡劣航行條件下的高速船艇需求提出的具有內傾式船艏的排水型單體高速穿浪船[2],具有穿浪、高速等優點。魏成柱等[2-4]對該艇的船型特征進行了數值分析和試驗研究。為了研究新概念穿梭艇的運動和操縱等性能,需要進行船模試驗,包括拖曳試驗和自航模試驗。拖曳試驗在拖曳試驗水池進行,試驗條件具有通用性;而對于自航模試驗,需要人工搭建動力系統和操控系統,試驗條件往往不具備通用性或可移植性。趙楊[1]設計了一套基于AVR單片機的自航操控系統,對目標船舶的單槳單舵系統進行控制,但是AVR單片機的接口數量較少,當船模需要添加多個傳感器時,AVR單片機將很難勝任;蘇威[5]介紹了上海交通大學自主研發的新型自航模系統,其能在試驗水池中得到船舶的各種操縱性數據,而且具有非常高的精度,但該套系統沒有在室外開闊自然水域進行試驗驗證;Shin等[6]使用一套自航系統對某船型進行試驗并獲取了船舶參數,系統具有很高的可靠性和精度,但由于采用了視覺定位技術,所用定位設備龐大,且需要220 V供電,而自然開闊水域往往不具備供電條件,設備搭建較為困難,因此在自然開闊水域的應用具有局限性;李成福[7]設計了以ATmega128單片機和復雜可編程邏輯器件(CPLD)為核心的下位機系統和由PC機構成的上位機系統,通過無線數據傳輸模塊,實現上、下位機的串行通信從而實現對船模電機伺服控制和實驗數據的采集,但ATmega128單片機接口數量少,擴展能力有限,在某種程度上限制了系統的可擴展性。蒲浩等[8]設計了一種基于Matlab軟件的新概念潛浮平臺自航操控系統,能夠有效地進行自航試驗,但是Matlab軟件較為昂貴且對計算機的硬件要求較高;高雷等[9]設計了一套基于PLC的“可控船模研究系統”并成功應用于船舶操縱性試驗。本文所針對的穿梭艇是一種新概念排水型單體高速穿浪船,具有細長、內傾式船艏、穿浪功能、橫搖頻率高[4]等特點。對該新概念船型的研究需要大量的航行狀態數據,即需要給船模擴展多種不同的傳感器,對自航系統的靈敏度和處理能力要求高,并且數據通信量大。同時,由于穿梭艇是一種新概念艇型,根據其實際航行效果,可能有必要對添加主動T型水翼、主動壓浪板等輔助機構展開進一步的研究,要求自航系統留有足夠的接口,方便擴展這些功能。針對新概念穿梭艇的特點,本文將為穿梭艇自航模研究和設計一套通用性和擴展性強的自航操控系統。系統將使用PC/ 104和ARM作為主控制器,其處理能力高且接口豐富,可擴展性強;使用開源的Python語言進行軟件模塊化開發,軟件成本低、運行效率高。所設計的系統將能有效解決新概念穿梭艇的試驗需求,且對于普通船舶和其他新型船舶,如小水線面雙體船等的自航試驗,該系統同樣適用,具有一定的通用性和可移植性。
1 穿梭艇自航模操控系統設計
1.1自航模介紹
穿梭艇自航模縮尺比為1∶6,采用雙槳雙舵的動力系統,模型簡圖如圖1所示,相關尺寸參數如表1所示。

圖1穿梭艇自航模示意圖Fig.1 Shuttle vessel free-running model

表1穿梭艇自航模參數Tab.1 Parameters of the shuttle vessel model
穿梭艇自航模要求所設計的操控系統能夠實現手動操控與自動控制,同時要能實時完成數據的采集和存儲。其中,手動操控要能實現穿梭艇自航模加減速航行、轉向、倒車動作,自動控制要求能夠實現Z形操縱、航向自動保持等。
1.2系統硬件設計
本文所設計的自航模操控系統采用基于網絡通信的上、下位機體系,由以下幾部分組成。
1)核心控制單元。
核心控制單元包括上位機和下位機。上位機用于監測自航模航行狀態、發送操控指令。下位機安裝在自航模內,用于執行控制命令、采集數據。系統上位機使用普通便攜式個人電腦。考慮到船模尺度以及系統的擴展性,下位機使用研華公司的PCM-3362型PC/104 CPU模塊,同時搭載PCM-3644型PC/104串行接口擴展板、PCM-3910 型PC/104電源板。上位機和下位機均使用Windows XP操作系統。
2)無線通訊系統。
操控系統通過Windows XP的遠程桌面功能,實現上位機對下位機的遠程操控。選用TP-LINK公司的TL-WR742N無線路由器建立無線局域網,能夠覆蓋半徑200 m左右的水面。上位機和下位機都配備無線網卡,通過建立的局域網,可實現上、下位機的遠程操控。
3)底層驅動系統。
底層驅動系統包括底層驅動器和執行器。
底層驅動器使用STM32核心板,該核心板采用ARM Cortex-M3系列嵌入式微處理器。
執行器包括推進系統和轉舵系統。自航船模一般選用直流電機、步進電機、舵機作為其執行器,新概念穿梭艇的推進系統選用2個直流無刷霍爾電機,額定電壓24 V,額定轉速3 000 r/min,額定功率180 W。配套螺旋槳外徑50 mm,雙槳外旋。使用ZM-6508直流無刷霍爾驅動器驅動2個直流無刷霍爾電機,驅動器讀取電機霍爾信號,實現轉速閉環控制。轉舵系統使用Tower Pro公司的MG995型大扭力伺服舵機控制垂直舵轉動。
下位機通過RS232串行通信接口發送指令至STM32核心板,STM32核心板產生脈寬調制(PWM)信號并將其發送至ZM-6508驅動器和舵機,實現電機調速和舵角控制。對于不同的船舶自航模,如果其執行器能夠通過PWM方式調節,該底層驅動系統仍然適用,則可方便移植到不同的船舶自航模中進行試驗。
4)數據采集系統。
數據采集系統由各種傳感器組成,其功能為采集自航模航行信息和執行機構信息,包括航速、自航模姿態、加速度、角速度、位置、舵角、螺旋槳轉速等信息。所選傳感器如表2所示,它們具有通用性,可在其他類型船舶自航模上使用。

表2傳感器型號Tab.2 Type of sensors
其中,GNSS RTK差分系統包括DGPS基站和DGPS移動站,使用時基站固定在岸邊開闊位置,移動站安裝在自航模上合適的位置,可以測量自航模經緯度、航向角和航速數據。AHRS5110M慣性導航系統可測量自航模三軸角度、三軸加速度和三軸角速度;E6B2-CWZ1X旋轉編碼器能夠測量舵角角度和螺旋槳轉速;DGPS系統、慣性導航系統通過串行接口通信方式將數據實時發送給PC/104下位機;STM32核心板讀取旋轉編碼器數據,并通過串行接口將編碼器數據發送給PC/104下位機。
5)通訊保護系統。
由于局域網覆蓋面積及信號強度有限,為防止因網絡通訊中斷導致自航模失控的情況發生,設計了一套通訊保護系統,如圖2所示。使用繼電器實現對STM32核心板電源的通斷。當上位機程序啟動時,繼電器閉合,STM32核心板通電;當網絡通訊中斷時間達到3 s時,下位機的通用輸入輸出(GPIO)接口驅動繼電器切斷STM32核心板電源,底層驅動信號消失,所有執行機構就會停止動作,直到網絡暢通并收到控制指令后再進行下一次動作,可避免因通信中斷導致的意外發生。

圖2通訊保護系統Fig.2 Protection system for communication
6)供電系統。
穿梭艇自航模供電電壓為24,12和5 V。使用2塊并聯24 V(10 A·h)鋰電池作為總電源,使用24 V轉12 V變壓器提供12 V電壓。其中:2個直流電機使用24 V電源供電;慣性導航系統、DGPS移動站使用12 V電壓供電。下位機PC/104電源模塊使用24 V電源供電,該電源模塊能夠輸出+5 V電源,為STM32核心板、旋轉編碼器供電。各個硬件與電源之間通過插拔式接線端子連接。穿梭艇自航模操控系統硬件搭建結構如圖3所示。

圖3穿梭艇自航模操控系統硬件搭建結構圖Fig.3 Hardware structure of the shuttle vessel manipulation and control system
大部分船舶的自航模都選用步進電機、直流電機和舵機作為其執行機構,不過在型號和數量上會有所不同,比如有些自航模會選用步進電機作為執行機構的動力、配備單槳單舵或全回轉槳等;船舶自航模在進行試驗時,需要測得航行姿態、航速及位置等信息。新概念穿梭艇自航操控系統的底層驅動系統所選用的ARM Cortex-M3系列嵌入式微處理器最多可以同時產生30路PWM信號,具有至少16路A/D轉換通道、5個通用異步收發器(UART)通道,而步進電機、直流電機和舵機均可以采用PWM方式進行控制;穿梭艇自航系統所選用的姿態、位置、航速等傳感器可直接用在不同的船舶自航模上,具有通用性。這就使得穿梭艇自航操控系統可模塊化移植到具有一定數量的直流電機、舵機、步進電機的船舶自航模上,具有良好的通用性和可移植性,減少了不同船舶自航模自航系統的開發工作量。
1.3系統軟件設計
控制系統軟件采用開源編程語言Python進行編寫,可在主流操作系統(如Windows,Linux等操作系統)上免費使用,使得操控系統的軟件通用性提高,且能夠降低開發成本。同時,Python語言具有豐富的功能擴展模塊,開發方便、快捷,能夠減小軟件制作工作量,加速軟件開發進度,節省操控系統開發時間。
1)執行機構控制程序。
執行機構包括螺旋槳和垂直舵。STM32核心板的PWM通道產生脈寬調制信號、GPIO通道產生脈沖信號,發送給電機驅動器,實現螺旋槳的運動控制。STM32產生頻率為50 Hz的PWM數字信號驅動舵機,實現垂直舵的控制。使用C語言編寫STM32驅動程序,具體編程方法詳見文獻[10]。
STM32核心板使用RS232協議與下位機通信。所設計的通信協議如圖4所示。
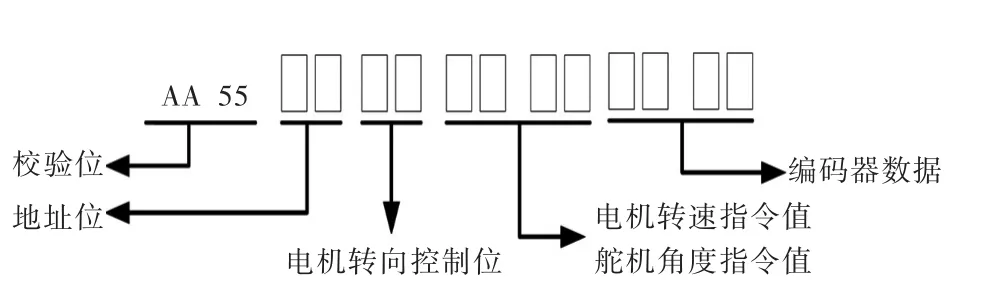
圖4 STM32與下位機之間的通信協議Fig.4 Communication protocol between the lower computer and STM32
當上位機通過遠程桌面操控下位機PC/104工控機發送控制指令、下位機接收和發送數據時,都需按照圖4所示的通信協議對控制指令進行封裝,STM32核心板根據收到的指令進行解碼,實現電機調速、舵機轉角等相應的功能。
2)數據采集軟件設計。
穿梭艇自航試驗過程中需要采集的數據有:執行機構動作數據,包括電機轉速指令數據、舵角指令數據、電機轉速實時數據、舵角實時數據;航行狀態數據,包括穿梭艇三軸角度、角速度、加速度、穿梭艇航速、絕對經緯度坐標值。進行軟件設計時,根據傳感器的數據協議,使用Python語言的串行接口讀取模塊進行編寫,讀取掛載在PC/104串行接口上各傳感器的數據;使用C語言編寫脈沖采集程序并在STM32核心板上運行,用以讀取旋轉編碼器數據。讀取的所有數據發送至PC/104操控軟件中,在同一頻率下,以.txt格式文件的形式實時保存至PC/104硬盤中,供后期處理使用。
3)操控界面設計。
穿梭艇自航操控系統具有的功能包括設備初始化、開環操控、自航閉環控制、實時數據顯示、急停及倒車等操作。自航模操控軟件程序流程簡圖如圖5所示。采用Python語言的Tkinter模塊[11]編寫操控界面。新概念穿梭艇自航操控系統軟件界面分為航行狀態區、開環控制區和閉環控制區3個部分,其中航行狀態區用以顯示自航模航行姿態、航速信息、位置信息、螺旋槳轉速信息等,開環控制區設置加減速指令按鈕、左右舵指令按鈕等功能,閉環控制區設置Z形操縱指令按鈕、正弦操控指令按鈕,如圖6所示。

圖5自航模操控軟件程序流程簡圖Fig.5 Flow chart of the free-running model's manipulation and control software

圖6自航模操控軟件界面Fig.6 Software interface of the free-running model's manipulation and control system
1.4軟、硬件性能分析
對新概念穿梭艇的研究,需要采集大量的航行狀態數據,數據通信量大;試驗過程中有必要添加多種不同的傳感器,對自航系統的靈敏度和處理能力要求高;根據其實際航行效果,有可能需要對添加主動T型水翼、主動壓浪板等輔助機構展開進一步的研究,這就要求自航系統留有足夠的接口,方便擴展這些功能。表3和表4所示為該自航操控系統的硬件和軟件性能。
由表3可以看出,自航硬件控制系統性能良好,且具有豐富的接口,數據處理能力和可擴展性強;由表4可以看出,軟件開發效率、執行效率高,能夠滿足新概念穿梭艇試驗需求。

表3硬件性能Tab.3 Hardware performance

表4軟件性能Tab.4 Software performance
2 自航試驗
自航模操縱性試驗通常在露天水池、天然湖泊或室內操縱性水池中進行[12]。穿梭艇自航模操控系統硬件、軟件開發完成后,以模塊化的形式搭建在穿梭艇自航模上,在上海交通大學閔行校區的涵澤湖進行試驗,水域長160 m,寬78 m,湖底平整,水深5 m,微弱風。通過試驗驗證操控系統軟、硬件設計的有效性。圖7所示為正在進行試驗的自航模。因螺線試驗和逆螺線試驗可以評價船舶的運動穩定性和回轉穩定性[13],同時也是對操控系統穩定性的有力考驗,故本研究使用螺線試驗和逆螺線試驗方法對穿梭艇自航模的運動特點進行分析,同時驗證操控系統的可行性。

圖7穿梭艇自航模試驗Fig.7 Experiment of the shuttle vessel free-running model
試驗開始前,先將穿梭艇自航模放入水中,使其處于自由靜止狀態,讀取傳感器初始數據。然后將螺旋槳轉速逐漸加速至900 r/min,當DGPS測得船模航速達到穩定時(試驗測得在螺旋槳轉速900 r/min下船模直線穩定航速為1.3 m/s),下達螺線試驗指令,舵角按照30°→20°→10°→0°→-10°→-20°→-30°→-20°→-10°→0°→10°→20°→30°依次變化以使穿梭艇回轉運動,每回轉一周更換一次舵角,進行3組試驗。選取其中一組試驗數據,從中選取經緯度數據導入谷歌地球,顯示出的穿梭艇運動軌跡衛星圖如圖8所示;選取舵角、橫傾角、艏向角速率繪制曲線,如圖9所示。

圖8螺線試驗軌跡衛星圖Fig.8 Satellite image of spiral test

圖9螺線試驗數據曲線Fig.9 Curve of the spiral test
分析圖9的試驗數據可知,在初始階段,穿梭艇直線航行,艏向角速率和橫傾角都為0,舵處于零位。當t=40 s時下達螺線試驗指令。在同一航速下,不同舵角將引起船舶航行回轉半徑的不同,艏向角變化率也將不同。從圖9可以看出,穿梭艇舵角從30°逐漸變小時,艏向角速率逐漸變小,而橫傾角的變化則很小;且自航系統能夠連續穩定工作較長時間,系統能有效工作,可靠運行。根據IMO操縱性標準[13],從試驗數據分析看出,穿梭艇具有良好的動穩定性和回轉穩定性,自航操控系統能夠連續穩定工作。此外,可以利用該系統進行Z形操舵試驗和制動試驗等,獲取的數據可用來分析和衡量船舶的回轉能力、制動能力及偏轉抑制性能等,也可通過參數辨識等方法,獲取船舶操縱性K,T參數及船舶運動模型參數等。
為進一步驗證穿梭艇自航操控系統的有效性,對穿梭艇船模不同航速下的姿態數據進行采集,并將自航操控系統測得的數據同穿梭艇船模拖曳水池試驗(圖10)數據進行對比。表5所示為二者的對比數據。

圖10穿梭艇船模拖曳水池試驗Fig.10 Towing experiment data of the shuttle vessel model

表5自航試驗與拖曳試驗數據的對比Tab.5 Comparison of experimental data between the free-running model and the towing one
繪制縱傾角隨航速變化的曲線,如圖11所示。由于試驗條件所限,無法得到平靜的水面和無風的環境,同時自航操控系統所使用的慣性導航系統性能較差,有小角度的隨機漂移。在低速段,由于穿梭艇自航模傾角較小,這些外界隨機因素干擾占比較大,導致與水池試驗的偏差較大。可以看到,在高速段,偏差占比逐步縮小,穿梭艇自航模縱傾角與拖曳水池試驗結果趨勢基本一致。可以看出,自航操控系統是有效的。后續在經費和條件允許的情況下,會嘗試安裝精度更高的慣性導航系統,同時在室內大型泳池等干擾小的環境下重復該試驗,以期得到更準確的結果。

圖11縱傾角隨航速變化曲線Fig.11 Variation of pitch angle with respect to speed
從上述試驗結果可以看出,所設計的自航操控系統有效、可靠,且性能良好,能夠在一定程度上反映新概念穿梭艇的運動效果和操縱性能。
3 結 語
本文針對新概念穿梭艇自航模的自航試驗需求,設計和開發了完整的自航操控系統。自航操控系統采用遠程操控實現上、下位機之間的控制體系功能,使用Python開源語言進行軟件的編寫。使用的STM32核心板和PC/104下位機主板均具有豐富的接口,使得操控系統具有較好的擴展性,如添加傳感器、執行機構及更豐富的閉環控制算法等;同時,所設計的操控系統采用模塊化設計,能夠方便地移植到具有類似執行機構的海洋運載器上,具有較好的可移植性。利用穿梭艇船模拖曳水池試驗數據,驗證了自航操控系統的有效性以及穿梭艇自航系統總體設計的可行性。需要指出的是,本文只利用自航操控系統對穿梭艇的航速和姿態進行了驗證,其他方面的功能還有待后期在自航操控系統的使用過程中進一步優化和驗證。
參考文獻:
[1]趙楊.船舶適航性與操縱性自航模系統設計[D].哈爾濱:哈爾濱工程大學,2010.
[2]魏成柱,李英輝,易宏.基于CAD與CFD的穿梭艇局部船型特征分析[J].船舶工程,2014,36(3):28-32. WEI Chengzhu,LI Yinghui,YI Hong. Analysis of shuttle vessel's local hull form characteristics based on CAD and CFD[J]. Ship Engineering,2014,36(3):28-32.
[3]劉怡錦.基于勢流理論的穿梭船型性能特征研究[D].上海:上海交通大學,2013.
[4]魏成柱.穿梭艇性能特征與船型優化[D].上海:上海交通大學,2013.
[5]蘇威. VLCC波浪中操縱性數值預報與自航模試驗研究[D].上海:上海交通大學,2012.
[6]SHIN H,PARK H S,YANG C S,et al. Motion analy?sis by free-running model test[C]// The Twelfth Inter?national Offshore and Polar Engineering Conference. Kitakyushu,Japan:International Society of Offshore and Polar Engineers,2002.
[7]李成福.自航船模控制系統研究[D].哈爾濱:哈爾濱工程大學,2008.
[8]蒲浩,馮正平,易宏.新概念潛浮平臺自航模操控系統設計[J].上海交通大學學報,2010,44(9):1312-1316. PU Hao,FENG Zhengping,YI Hong. Control system design for self-propelled model of a new concept sub?merging and surfacing platform[J]. Journal of Shang?hai Jiaotong University,2010,44(9):1312-1316.
[9]高雷,李密,葉劉剛. ARMS在船舶操縱性試驗中的應用[J].船舶工程,2008,30(6):4-6,10. GAO Lei,LI Mi,YE Liugang. ARMS for the free run?ning model test on the ship maneuverability[J]. Ship Engineering,2008,30(6):4-6,10.
[10]張洋,劉軍,嚴漢宇.原子教你玩STM32[M].北京:北京航空航天大學出版社,2013.
[11]GRAYSON J E. Python and Tkinter programming [M]. Greenwich:Manning,2000.
[12]盛振邦,劉應中.船舶原理[M].上海:上海交通大學出版社,2004.
[13]International Maritime Organization. IMO standards for ship manoeuvrability[S/OL].[2015-08-01]. http: //www. crs. hr/ portals/ 0/ docs/ eng/ imo_iacs_ed/ imo/ msc_reports/MSC76-23-Add-1. pdf.
Experimental study on the control system for the free-running model test of a new concept shuttle vessel
WANG Jian,LIU Jingyang,WEI Chengzhu,LI Yinghui,YI Hong
State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China
Abstract:The free-running model test is an effective way to evaluate ship performance. In this paper, a Manipulation and Control (MC) system is designed for a new concept shuttle vessel. The MC system in?cludes two parts: an ashore control system and an onboard control system, and the two parts exchange infor?mation through a Wireless Local Area Network (WLAN). The actuators of the shuttle vessel are equipped with sensors to obtain the feedback data, and certain sophisticated programmable elements are incorporated as the drivers of the actuators, where the lower and upper computer software are both written in the Python programming language. The MC system is then successfully applied to the free-running model test of the new concept shuttle vessel. Experimental results indicate that the MC system is efficient in terms of the de?velopment effort, easy to be operated, and has good scalability and portability. The maneuverability of the new concept shuttle vessel is well demonstrated through the free-running model test results. Finally, the free-running experiment results tested with the MC system is compared with the actual towing tank data, which shows high consistency.
Key words:shuttle vessel;free-running model;control system
作者簡介:王健,男,1989年生,博士生。研究方向:海洋運載器運動控制。E-mail:nsms_sjtu@sjtu.edu.cn劉旌揚(通信作者),男,1982年生,博士,講師。研究方向:海洋運載器智能控制。E-mail:jy_liu@sjtu.edu.cn易宏,男,1963年生,教授,博士生導師。研究方向:潛水器與特種船舶開發研究,海上裝備與系統,系統可靠性與人因工程研究。E-mail:yihong@sjtu.edu.cn
基金項目:上海交通大學海洋工程國家重點實驗室自主研究課題(GKZD010061)
收稿日期:2015 - 08 - 08網絡出版時間:2016-1-19 14:55
中圖分類號:U661.73
文獻標志碼:A
DOI:10.3969/j.issn.1673-3185.2016.01.012
網絡出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160119.1455.026.html期刊網址:www.ship-research.com
引用格式:王健,劉旌揚,魏成柱,等.新概念穿梭艇自航模操控系統試驗研究[J].中國艦船研究,2016,11(1):95-101. WANG Jian,LIU Jingyang,WEI Chengzhu,et al. Experimental study on the control system for the free-running model test of a new concept shuttle vesse[lJ]. Chinese Journal of Ship Research,2016,11(1):95-101.