
定點(diǎn)巡視與帶電清理平臺(tái)的研究與設(shè)計(jì)
2016-04-25 10:13:28張樹立楊天順陳運(yùn)正馬曉歡
中國(guó)科技博覽 2016年9期
張樹立++楊天順++陳運(yùn)正++馬曉歡
[摘 要]隨著社會(huì)經(jīng)濟(jì)的高速發(fā)展和城鄉(xiāng)建設(shè)速度的加快,架空輸電線路所處的地理環(huán)境發(fā)生了很大的變化,原本偏僻的曠野和農(nóng)田現(xiàn)在變成了居民區(qū)和開發(fā)區(qū),人類活動(dòng)的增多加大了架空輸電線路發(fā)生事故的隱患,如春秋季風(fēng)把風(fēng)箏、地膜等異物刮落并纏繞在導(dǎo)地線活桿塔上,如果不及時(shí)清理可能引發(fā)架空輸電線路的跳閘故障。基于此,本文研究并設(shè)計(jì)了一種定點(diǎn)巡視與帶電清理平臺(tái),可以利用機(jī)械臂、無人機(jī)等進(jìn)行導(dǎo)地線異物的帶電清理,對(duì)于確保架空輸電線路的供電可靠性具有重要的現(xiàn)實(shí)意義。
[關(guān)鍵詞]定點(diǎn)巡視;帶電清理;無人機(jī);機(jī)械臂;航拍攝像機(jī)
中圖分類號(hào):TP274 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1009-914X(2016)09-0092-01
1 問題提出
以往架空輸電線路上纏繞異物的清理,主要有如下兩種方式:
第一種是停電處理,即對(duì)于已經(jīng)跳閘線路和垂直排列的導(dǎo)線等帶電處理安全距離不夠的情況,采用停電后由人工進(jìn)行登塔處理。
第二種是帶電處理,比較常見的有懸掛軟梯處理法和穿全套屏蔽服處理法,前者是在纏繞異物的導(dǎo)地線上安裝絕緣軟梯,然后由等電位作業(yè)人員攀登軟梯進(jìn)入電場(chǎng)進(jìn)行異物處理;后者是等電位作業(yè)人員采用吊籃法、載人旋轉(zhuǎn)式平梯法直接沿耐張絕緣子串進(jìn)入強(qiáng)電場(chǎng),然后清理纏繞異物。
上述兩種方式都存在很大的不足之處,如停電處理不僅會(huì)影響用戶的正常用電,而且受到停電時(shí)間和運(yùn)行方式的限制,因此并不適宜大面積使用;帶電處理存在一定的安全隱患,使用流程也比較繁瑣。基于此,如何構(gòu)建一種安全、高效且適宜大范圍使用的定點(diǎn)巡視與帶電清理平臺(tái)就迫在眉睫了。
2 定點(diǎn)巡視與帶電清理平臺(tái)的設(shè)計(jì)
2.1 總體思路
本文所設(shè)計(jì)的定點(diǎn)巡視與帶電清理平臺(tái),將在多旋翼無人機(jī)上安裝機(jī)械臂、航拍攝像機(jī)及適用的鉤子等部件,針對(duì)架空線路上的風(fēng)箏、包裝帶等異物,利用無人機(jī)帶電進(jìn)入現(xiàn)場(chǎng)、帶電消除的方法與措施,來降低勞動(dòng)強(qiáng)度,提高異物清理的安全性。
2.2 多旋翼無人機(jī)
根據(jù)無人機(jī)的結(jié)構(gòu),可將其分為如下三類:(1)固定翼無人機(jī),其飛行速度可達(dá)到100~200km/h,并且持續(xù)時(shí)間長(zhǎng),適合進(jìn)行大范圍、大面積及長(zhǎng)距離巡檢,但不能懸停,只能沿線路進(jìn)行單方向快速巡檢;(2)無人直升機(jī),其能夠定點(diǎn)起飛、降落及固定懸停,飛行速度多在100km/h以內(nèi),但續(xù)航時(shí)間較短,不適宜長(zhǎng)距離巡線;(3)多旋翼無人機(jī),其體積小且巡線時(shí)不會(huì)占用航道,可快速充電來保障持續(xù)飛行,具有車載大范圍機(jī)動(dòng)和個(gè)人攜帶能力,可實(shí)行高精度控制來獲取目標(biāo)高清圖像。
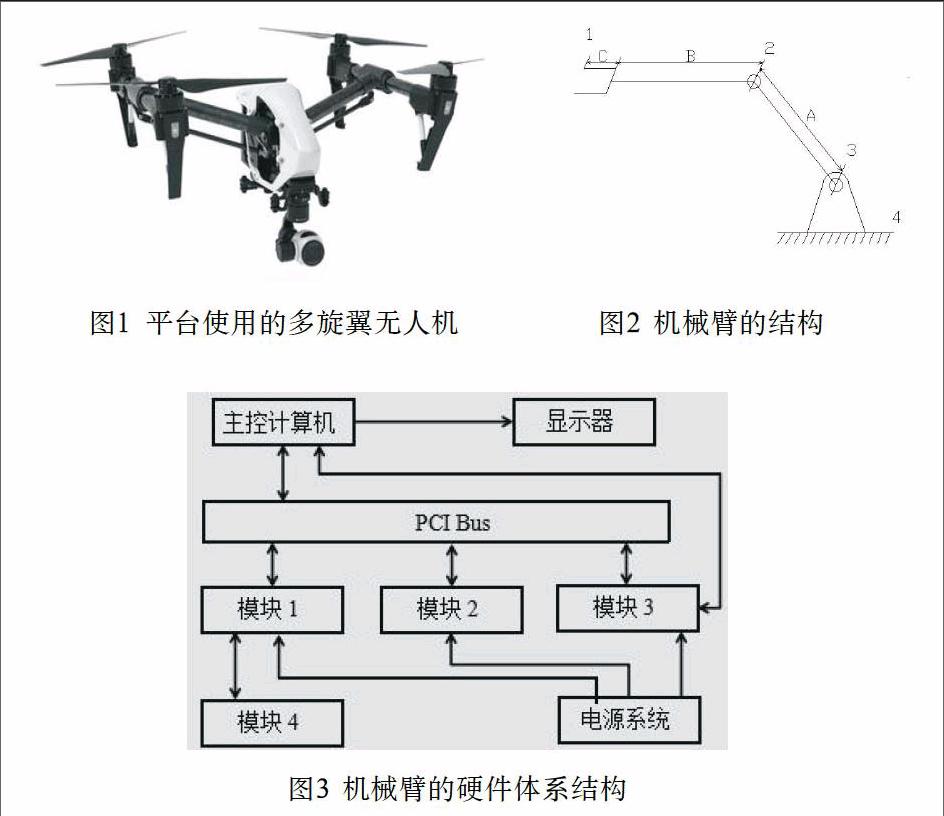
無人機(jī)的價(jià)格比較高,固定翼無人機(jī)和無人機(jī)直升機(jī)的價(jià)格都是百萬以上,性能較的甚至超過了千萬。這樣的成本對(duì)于一般的電力部門是難以承受的,而且現(xiàn)階段超長(zhǎng)距離的整體巡線頻率也不高,因此價(jià)格便宜而且巡線方式靈活的多旋翼無人機(jī)是現(xiàn)階段最容易得到推廣的機(jī)型,故本文最終選擇了多旋翼無人機(jī),如圖1所示。
2.2 航拍攝像機(jī)
以往輸電線路巡線多采用目測(cè)法,即在視距中用人眼直接觀測(cè)或用望遠(yuǎn)鏡對(duì)導(dǎo)線等進(jìn)行觀測(cè),沿著輸電線路走,這種方法簡(jiǎn)單易行,但是實(shí)際應(yīng)用中,由于受地理、氣候等條件的限制,有很多的地方不能觀測(cè)到或無法準(zhǔn)確的觀測(cè),因此通常只有輸電線路破損部分狀況嚴(yán)重時(shí)才能被發(fā)現(xiàn)。
針對(duì)目測(cè)法的缺陷,本文采用在多旋翼無人機(jī)安裝航拍攝像機(jī)(由高清攝像機(jī)及自動(dòng)云臺(tái)組成)的方式,來對(duì)輸電線路及相關(guān)設(shè)施(輸電線、架空地線、金具、絕緣子、桿塔等)的狀況進(jìn)行檢測(cè),例如利用航拍攝像機(jī)所拍攝的輸電線路圖像,工作人員可以通過肉眼識(shí)別出圖像中的異常現(xiàn)象,如果發(fā)現(xiàn)輸電線路上有風(fēng)箏等異物,就可以通過操作機(jī)械臂及鉤子來進(jìn)行清除。
2.3 機(jī)械臂
作為一款多功能異物消除裝置,為完成抓取風(fēng)箏、包裝袋等異物的任務(wù),本裝置必須能夠靈活地到指定目標(biāo)位置進(jìn)行異物抓取,能夠方便地伸長(zhǎng)、旋轉(zhuǎn)到不同的姿態(tài),如果自由度太小將大大限制機(jī)械臂的工作空間而無法抓取目標(biāo)物。考慮到有時(shí)目標(biāo)物可能置于不利空間中,還應(yīng)該使機(jī)械手能夠有效達(dá)到避障的目的。
考慮到上述因素,本裝置的機(jī)械臂具有3個(gè)自由度(手部、臂部和肩部),圖2為機(jī)械臂的具體結(jié)構(gòu),其的相關(guān)參數(shù)如下:大臂380mm、小臂420m、手爪160mm,折疊時(shí)總長(zhǎng)≤650mm,單臂桿轉(zhuǎn)動(dòng)范圍為150°,旋動(dòng)速度0.5rad/s, 抓取重量為3kg,抓取對(duì)象為直徑40mm、長(zhǎng)度360mm的圓柱體。機(jī)械臂設(shè)計(jì)中,繞水平軸旋轉(zhuǎn)的自由度肩部使用了蝸輪蝸桿副,臂部使用了圓錐齒輪傳動(dòng),手部使用了直齒圓柱齒輪及左右螺旋的形式傳動(dòng)。
機(jī)械臂的硬件體系結(jié)構(gòu)的設(shè)計(jì)采用了模塊的設(shè)計(jì)思想(如圖3),模塊1為基于運(yùn)動(dòng)控制卡的平臺(tái)驅(qū)動(dòng)模塊;模塊2為基于運(yùn)動(dòng)控制卡的機(jī)械臂模塊;模塊3為包含圖像采集卡的視覺模塊;模塊4為基于單片機(jī)的超聲和接觸傳感器處理模塊。
上述結(jié)構(gòu)中,模塊1實(shí)現(xiàn)平臺(tái)的轉(zhuǎn)動(dòng);模塊2實(shí)現(xiàn)各關(guān)節(jié)的轉(zhuǎn)動(dòng);模塊3實(shí)現(xiàn)利用圖像采集卡將攝像頭傳入的模擬信號(hào)轉(zhuǎn)化為數(shù)字視頻信號(hào),同時(shí)通過RS232串口同主控計(jì)算機(jī)連接,提供當(dāng)前的路徑情況。以上3個(gè)模塊都通過PCI總線擴(kuò)展槽和主控計(jì)算機(jī)進(jìn)行通訊。傳感器處理模塊利用單片機(jī)系統(tǒng)實(shí)現(xiàn)對(duì)各個(gè)傳感器的數(shù)據(jù)采集,然后利用平臺(tái)運(yùn)動(dòng)控制卡的I/O接口和主控計(jì)算機(jī)相連。主控計(jì)算機(jī)完成各個(gè)部件模塊的數(shù)據(jù)處理和計(jì)算任務(wù),顯示器是監(jiān)控人員和的交互界面。
3 結(jié)語
采用本文所設(shè)計(jì)的定點(diǎn)巡視與帶電清理平臺(tái)來去除架空線路上的風(fēng)箏、塑料包裝等異物時(shí)不用停電,人員無需帶電作業(yè),需用人力大大減少,時(shí)間大大縮短,規(guī)避了不安全的的因素且避免了長(zhǎng)時(shí)間停電帶來的經(jīng)濟(jì)損失,對(duì)保證線路的可靠運(yùn)行起到了重要的作用。因此筆者認(rèn)為,本定點(diǎn)巡視與帶電清理平臺(tái)具有很強(qiáng)的實(shí)用價(jià)值和推廣意義。
參考文獻(xiàn)
[1]甄鴻俊,唐小亮.輸電線路導(dǎo)、地線異物清理機(jī)上下線結(jié)構(gòu)的研制與應(yīng)用[J].中國(guó)新技術(shù)新產(chǎn)品,2015(2).
[2]李勝華,戴亮,劉峰,袁莉,李敬豪,張雄.一種實(shí)用的電力線路異物清除裝置[J].農(nóng)村電工,2015(11).
[3]陳義忠.對(duì)架空配電線路實(shí)施旁路帶電作業(yè)法進(jìn)行探討[J].商品與質(zhì)量·學(xué)術(shù)觀察,2011(3).
猜你喜歡
物聯(lián)網(wǎng)技術(shù)(2017年2期)2017-03-15 17:04:47
中國(guó)科技博覽(2016年27期)2017-01-23 01:32:28
農(nóng)機(jī)使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學(xué)學(xué)報(bào)·自然科學(xué)版(2016年1期)2016-12-14 22:15:06
計(jì)算機(jī)教育(2016年7期)2016-11-10 09:01:27
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
現(xiàn)代電子技術(shù)(2015年17期)2015-09-23 22:07:14