異結構不等精度測量的融合估計分析
2016-05-06 06:11:48周海銀何章鳴
長沙大學學報 2016年2期
尹 晨,周海銀,何章鳴
(國防科學技術大學理學院, 湖南 長沙 410073)
?
異結構不等精度測量的融合估計分析
尹晨,周海銀,何章鳴
(國防科學技術大學理學院, 湖南 長沙 410073)
摘要:融合估計是提高參數估計精度的有效手段.針對異結構和不等精度測量條件,利用合同變換、跡函數和矩陣微分等數學工具,分析了融合估計問題.分析表明:第一,單設備估計、最優融合估計和聯合估計都是融合估計的特例;第二,聯合估計的精度高于低精度單設備估計的精度;第三,最優估計的精度高于高精度單設備估計的精度,而且總是高于聯合估計的精度;第四,只有滿足一定條件,聯合估計的精度才高于高精度單設備估計的精度.上述理論在V2導彈參數融合估計的仿真中得到了驗證.
關鍵詞:參數估計;融合估計;聯合估計;最優融合估計;合同變換;跡函數;矩陣微分
在眾多參數估計領域中,融合估計是提高參數估計精度的有效手段[1-3].在實際靶場數據處理中,往往存在多臺測量設備,不同設備的觀測幾何往往是不同的,即所謂的異結構測量;同時,不同設備的測量精度也是不同,即所謂的不等精度測量.由于設備的類型不同、采樣周期的差異、設備位置的站址不同、周圍氣象的差異等原因,造成了設備的觀測幾何的差異,這個差異往往表現在設計矩陣上.異結構測量條件下,不同設備對應的基函數及其各階導數都不同,因而對應的設計矩陣也不同.單測量設備精度差異主要是由設備的制造工藝的差別和設備測量人員的調校差異引起的.融合估計理論對靶場數據融合處理具有重要指導意義,為其提供了理論支撐[4,5].對于線性回歸模型的參數估計,Gauss-Markov定理給出了不等精度測量數據的最優融合估計的加權因子計算方法[6].Gauss-Markov假設下,觀測數據的隨機誤差是獨立同分布[7-12],然而不等精度測量條件下,不同設備的測量精度往往是不同的,而且這些精度參數往往是未知的,因此在實際數據處理過程中,難以得到最優融合估計[11,12,14-18],從而經常用到的是聯合估計(即等權估計).本文關注下面幾個問題:第一,如何用統一的公式概括單設備估計、最優融合估計和聯合估計?第二,單設備估計、最優融合估計和聯合估計的估計精度存在什么關系?第三,在什么條件下,聯合估計的估計精度高于單設備估計的精度?
1參數估計和精度分析
1.1線性模型和參數估計
考慮如下線性測量模型:
y=Xβ+e
(1)
模型(1)中參數β的最小二乘估計,如下:
(2)
(3)


(4)
在靶場數據處理中,往往會出動多臺設備對目標進行觀測,本文不妨假設有兩臺設備,如下:
(5)
如果只使用其中的一臺設備數據進行參數估計,那么單設備的參數估計的精度分別為:
(6)
記
(7)
其中λ稱為測量精度比,下文總是假定:
(8)
1.2融合估計
若依據下述準則估計參數
(9)

(10)
參數的融合估計如下:
(11)
容易驗證
(12)
(13)
(14)
1.3特殊的融合估計
1.3.1單設備估計
若在優化準則(9)中ρ=1或者ρ=0,則融合估計轉化為單設備參數估計.
依據附錄A,可以證明
(15)
即融合估計的精度總是比低精度單臺設備估計的精度高.
1.3.2最優融合估計
(16)
(17)
依據附錄A,可以證明
(18)
即多臺設備的最優估計的精度總是高于單臺設備估計的精度,甚至比高精度單臺設備估計的精度還要高.從信息論的觀點來看,所有設備都蘊含了對參數估計有用的信息,因此,只要方法合適,就可以通過增加測量設備的方法提高參數估計的精度,即使增加的設備測量精度很低,也可以提高參數估計的精度.
1.3.3聯合估計
(19)
(20)
依據附錄B,可以證明
(21)
即多臺設備的最優估計的精度總是高于多臺設備的聯合估計的精度,而且聯合估計的精度總是高于低精度單臺設備估計的精度,但是不一定高于高精度單臺設備估計的精度,即下式成立需要一定的條件:
(22)
如果(22)式不成立,則說明低精度設備的參與使得參數估計的精度變差了,這意味著聯合估計不如用單臺高精度設備,下一節分析(22)式成立的條件.
2聯合估計分析
若第一臺設備的估計方差更小,即
(23)
由公式(6)、(7)、(20)可知,公式(22)與下式等價:
(24)
(25)
由公式(6)、(7)、(20)可知,公式(22)與下式等價:
(26)
2.1觀測幾何相同
如果兩臺設備的觀測幾何相同,即A=B,那么,公式(24)和(26)分別等價于
(27)
和
(28)
綜上,若以下公式成立,則公式(22)成立
(29)
2.2觀測幾何不相同
如果兩臺設備的觀測幾何不相同,即A≠B,那么分兩種情況討論:
第一種情況下:公式(24)成立,則依據附錄A,必然存在可逆矩陣P使得
(30)
(31)
即
(32)
第二種情況下:公式(25)成立,則依據附錄A,必然存在可逆矩陣P使得
(33)
所以,若以下公式成立,則公式(24)成立
(34)
即
(35)
綜合公式(32)和(35)得公式(24)成立的充分條件:
(36)
3仿真分析
本文以著名的德國V2彈道導彈為仿真對象,V2導彈垂直上升到24km~29km后,在發動機噴口燃氣舵的作用下以40度的傾角彈道上升,一分鐘后導彈飛到48km高度,速度達到5796km/h,發動機關閉,火箭靠慣性繼續上升到97km,然后以3542km/h的速度大致沿拋物線自由下落,大約2.5分鐘后擊中目標.其中重力加速度為g=9.7ms-2.

4種融合估計策略下的參數估計方差見表1和圖1.可以得到如下結論:
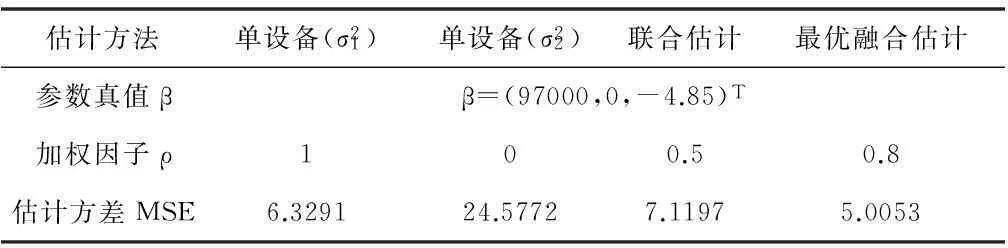
表1 四種融合估計的比較
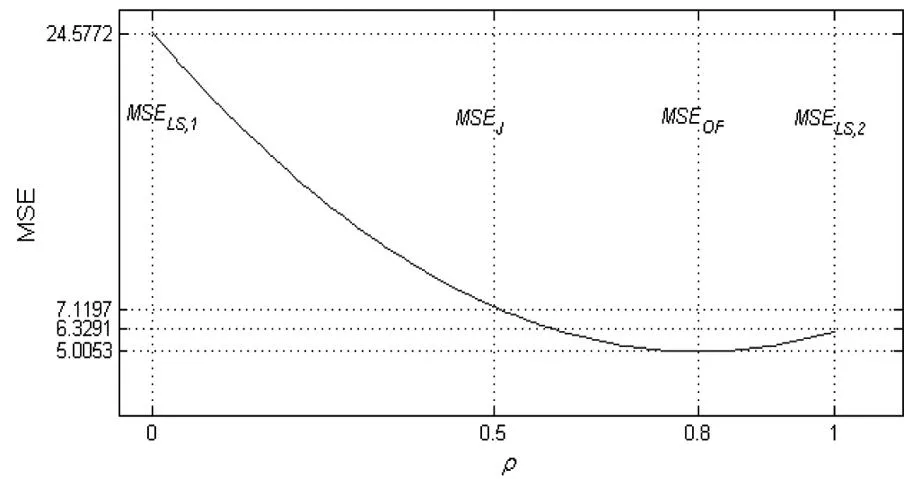
圖1 融合方差與加權因子關系
4結論

由于本文沒有考慮系統建模誤差,所以本文的理論還有待改進.比如,因為存在空氣阻力、重力加速度變化和彈體自身抖動,致使導彈自由下落段的軌跡不是嚴格的拋物線.如果選用二次多項式基函數建模,必然存在系統建模誤差.系統誤差是如何影響融合估計的,尤其是如何影響聯合估計的,是未來要研究的問題.
參考文獻:
[1]Bar-Shalom Y, Chen H, Mallick M. One-step solution for the multi-step out of sequence measurement problem in tracking [J]. IEEE Transactions on Aerospace and Electronics Systems, 2004, (1): 27-37.
[2]Li X R, Vesselin P. A Survey of maneuvering target tracking-Part V: multiple-model methods [A]. Proceeding of SPIE Conference on Signal and Data Proceeding of Small Targets[C]. San Diego, CA, USA, 2003.
[3]Mazuelas S, Prieto J. Adaptive data fusion for wireless localization in harsh environments[J]. IEEE Transactions on Signal Processing, 2012, (4): 1585-1596.
[4]Wang Z M, Yi D Y. Measurement Data Modeling and Parameter Estimation [M]. CRC Press, 2011.
[5]Bar-Shalom Y, Li X R, Kirubarajan T. Estimation with Applications to Tracking and Navigation[M]. New York: Wiley, 2001.
[6]陳希孺, 王松桂. 近代回歸分析[M]. 合肥: 安徽教育出版社, 1987.
[7]Saha R K. Effect of common process noise on two-track fusion [J]. Journal of Guidance, Control & Dynamics, 1996, (4): 829-835.
[8]Gan Q, Harris C J. Comparison of two measurement fusion methods for Kalman filter based multi-sensor data fusion[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, (5): 273-280.
[9]Bates D M, Watts D G. 非線性回歸分析及其應用[M]. 韋博成,萬方煥,朱宏國,譯.北京: 中國統計出版社, 1997.
[10]韋博成. 近代非線性回歸分析[M]. 南京:東南大學出版社, 1989.
[11]Rick A, Brian B, Cliff T. Parameter estimation and inverse problems [EB/OL]. http://www.ees.nmt.edu/Geop/Classes/GEOP529/Docs/draft.pdf, 2003-03-24.
[12]Kaipio J P, Juntunen M. Deterministic regression smoothness priors TVAR modeling [A]. ICASSP’99 Proceedings of the Acoustics,Speech and Signal Processing [C]. IEEE,1999.
[13]Tikhonov A N. Solutions of Ill-Posed Problems [M]. New York: John Wiley & Sons, 1977.
[14]Voutilainen A, Stratmann F, Kaipio J P. A non-homogeneous regularization method for the estimation of narrow aerosol size distributions [J]. J Aerosol Sci, 2000, (4): 1433-1445.
[15]劉繼軍. 不適定問題的正則化方法及應用[M]. 北京:科學出版社,2005.
[16]Bronstein M M. Blind deconvolution of images using optimal sparse representations[J]. IEEE Transactions on Image Processing,2005,(6): 726-736.
[17]Kirsch A. An Introduction to the Mathematical Theory of Inverse Problems [M]. New York: Springer-Verlag, 1996.
[18]Poggio T, Torre V, Koch C. Computational vision and regularization theory [J]. Nature, 1985, (317): 314-319.
附錄
附錄A
已知:已知A和B都是n階方陣,而且都是正定矩陣.
求證:tr(A+B)-1 證明: 第三步:因為(A+B)-1 附錄B 已知:已知A和B都是n階正定矩陣,λ>0. 求證: tr(A+λ-1B)-1≤tr(A+λB)(A+B)-2 ≤max{tr(A-1),λtr(B-1)} 證明: 第二步:記融合估計的方差為: tr(ρ) =tr(ρ2A+λ(1-ρ)2B)(ρA+(1-ρ)B)-2 顯然有: tr(ρ) =trPT(ρ2I+(1-ρ)2λΛ)(ρI+(1-ρ)Λ)-2P-1 可知命題成立. (責任編校:晴川) Fusion Analysis on Estimation of Multi-structure and Unequal-precision YIN Chen, ZHOU Haiyin, HE Zhangming (College of Science, National University of Defense Technology, Changsha Hunan 410073, China) Abstract:Fusion estimation is an effective measure to improve the precision of parameters estimation. In this paper, the fusion estimation problem is analyzed for the measurement conditions with multi-structures and unequal-precisions, using the tools of congruent transformation, trace function and matrix differential. Analysis shows that: Firstly, the single equipment estimation, the optimal fusion estimation and the joint estimation are some special cases of the fusion estimation; Secondly, the precision of the joint estimation is higher than that of the single equipment estimation with smaller random error; Thirdly, the precision of the optimal estimation is higher than that of the single equipment estimation with bigger random error, and is always higher than that of the joint estimation; Forthly, the precision of the joint estimation is higher than that of the single equipment estimation with bigger random error if certain conditions are satisfied. The fusion estimation theories results are validated by the simulation of the V2 missile. Key Words:parameter estimation; fusion estimation; joint estimation; optimal fusion estimation; congruent transformation; trace function; matrix differential 中圖分類號:O29 文獻標識碼:A 文章編號:1008-4681(2016)02-0009-04 作者簡介:尹晨(1992— ),女,湖南衡陽人,國防科學技術大學理學院碩士生.研究方向:數據融合理論及應用、故障診斷理論及應用. 基金項目:國家重點基礎研究項目(批準號:613156030103);國家自然科學基金(批準號:61304119)資助項目;國防科大科研基金(批準號:JC14-09-01)資助項目. 收稿日期:2015-11-20