基于目標(biāo)跟蹤的數(shù)據(jù)挖掘研究
2016-05-06 06:04:07蔡娟娟
長沙大學(xué)學(xué)報(bào) 2016年2期
蔡娟娟
(福建師范大學(xué)人民武裝學(xué)院,福建 福州 350007)
?
基于目標(biāo)跟蹤的數(shù)據(jù)挖掘研究
蔡娟娟
(福建師范大學(xué)人民武裝學(xué)院,福建 福州 350007)
摘要:針對具有相對固定背景的監(jiān)控視頻數(shù)據(jù)中運(yùn)動(dòng)目標(biāo)特征的挖掘問題,提出了一種以背景差法檢測和Meanshift+Kalman綜合算法跟蹤視頻目標(biāo)對象為基礎(chǔ),提取對象的運(yùn)動(dòng)軌跡, 并對其進(jìn)行數(shù)據(jù)挖掘的系統(tǒng)模型,實(shí)現(xiàn)了對異常行為軌跡的有效識(shí)別.
關(guān)鍵詞:背景差法;Meanshift;Kalman;聚類分析
隨著計(jì)算機(jī)軟硬件技術(shù)、網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,視頻以其囊括信息豐富、表現(xiàn)力強(qiáng)等優(yōu)勢逐漸成為多媒體中應(yīng)用越來越廣泛的一種重要媒體.面對涌現(xiàn)出來的大量視頻數(shù)據(jù),人們希望計(jì)算機(jī)能自動(dòng)對視頻中一幅或多幅畫面進(jìn)行處理,從中提取有效、新穎、有價(jià)值的知識(shí),獲取蘊(yùn)含于其中的語義理解.它不但要求計(jì)算機(jī)能模擬人的視覺感官功能,感知視頻圖像中特定目標(biāo)的外觀、位置、形體姿態(tài)、運(yùn)動(dòng)軌跡等幾何內(nèi)容,而且還要能對其進(jìn)行描述、存儲(chǔ)、識(shí)別和理解,通過數(shù)據(jù)挖掘?qū)@取的這些信息和理解知識(shí)用于支持用戶進(jìn)行決策[1].通過對視頻中的圖像序列進(jìn)行自動(dòng)處理,從而識(shí)別目標(biāo),對它進(jìn)行跟蹤,進(jìn)而提取目標(biāo)的運(yùn)動(dòng)軌跡特征.基于這些數(shù)據(jù),選用恰當(dāng)?shù)臄?shù)據(jù)挖掘方法,挖掘出潛在的特征含義及知識(shí),用于分析、判斷目標(biāo)的行為,對異常軌跡予以重點(diǎn)關(guān)注.
1視頻處理
1.1視頻預(yù)處理
在攝錄監(jiān)控視頻過程中可能有一些傳輸過程中的噪聲或周圍環(huán)境的噪聲,這些噪聲會(huì)引起視頻圖像模糊或不完整,不利于進(jìn)一步對其進(jìn)行處理,為避免這些不利因素干擾到后續(xù)視頻處理算法的效率,需要對視頻進(jìn)行預(yù)處理,以得到高質(zhì)量的視頻對象,提高后續(xù)算法的精確度.
1.2目標(biāo)檢測
在對監(jiān)控視頻中的目標(biāo)對象進(jìn)行跟蹤、提取運(yùn)動(dòng)軌跡并進(jìn)行數(shù)據(jù)挖掘之前,需要將目標(biāo)對象從視頻序列圖像的背景中檢測分割出來,也就是目標(biāo)檢測.通常要求算法在無人工干預(yù)的情況下,實(shí)現(xiàn)自動(dòng)檢測.但是由于環(huán)境的影響,比如晝夜的光照變化、風(fēng)吹引起的樹葉搖動(dòng)等干擾,給目標(biāo)檢測工作增添了相當(dāng)多的困難[2].常見的檢測算法主要有:
(1)光流法可以用于未知的場景中對目標(biāo)運(yùn)動(dòng)對象進(jìn)行檢測,能夠在場景變化如攝像機(jī)運(yùn)動(dòng)的狀態(tài)下使用,但它的算法較為復(fù)雜,計(jì)算量大,計(jì)算時(shí)間長,并且容易受噪聲影響.
(2)幀間差分法根據(jù)前后兩幀圖像間的差分檢測運(yùn)動(dòng)目標(biāo)對象,抗噪聲干擾性強(qiáng),常用于背景動(dòng)態(tài)變化下的目標(biāo)檢測.缺點(diǎn)是分割的對象輪廓經(jīng)常不完整,容易形成空洞,不適用于對靜止或變化較小的目標(biāo)檢測.
(3)背景差法是應(yīng)用較為廣泛的一種算法,適用于背景已知的情況,將當(dāng)前幀與背景幀相減來檢測運(yùn)動(dòng)目標(biāo),可以獲取較完整的檢測對象輪廓,即使目標(biāo)靜止,也可以成功檢測,算法簡單有效.
鑒于監(jiān)控視頻中的數(shù)據(jù)來源于固定攝像頭所拍攝的內(nèi)容,因此通過對以上各種方法的比較,背景差法最適用.該方法運(yùn)行速度快,內(nèi)存占用少,獲得的輪廓比較完整.在實(shí)際視頻處理過程中,視頻運(yùn)動(dòng)對象的檢測往往伴隨著運(yùn)動(dòng)對象的分割,將背景差法用于檢測運(yùn)動(dòng)對象后,直接獲取對象的形狀、大小、位置等信息,等同于對其一并做了分割處理,為后續(xù)更深入的研究做準(zhǔn)備.實(shí)驗(yàn)結(jié)果如圖1所示,左邊場景中包含若干個(gè)行走的人,右邊是通過背景差法得到的運(yùn)動(dòng)前景剪影,可以得到較為清晰的分割對象輪廓.

圖1 運(yùn)動(dòng)目標(biāo)檢測
1.3目標(biāo)跟蹤
視頻目標(biāo)跟蹤是一個(gè)迅速發(fā)展的研究領(lǐng)域,屬于計(jì)算機(jī)視覺的研究范疇.目標(biāo)跟蹤是指在視頻場景中,對序列幀圖像中的目標(biāo)進(jìn)行連續(xù)處理,即根據(jù)目標(biāo)及其所在的位置,選擇能夠唯一表示目標(biāo)的特征,如形狀、速度和紋理等,并在后續(xù)幀中搜索與該特征最為匹配的目標(biāo)位置的過程[3].目標(biāo)跟蹤的目的,是生成目標(biāo)對象在視頻序列中的聯(lián)系,有效地分析處理視頻幀序列中的指定目標(biāo),如:獲得目標(biāo)的輪廓、位置、軌跡等運(yùn)動(dòng)信息,以計(jì)算機(jī)視覺部分代替人類的視覺系統(tǒng)功能,為后續(xù)的目標(biāo)運(yùn)動(dòng)分析提供了可靠的數(shù)據(jù)來源.
1.3.1卡爾曼(Kalman)濾波算法
Kalman算法通過“預(yù)測一實(shí)測一修正”的順序來遞推預(yù)測,根據(jù)卡爾曼遞推公式,即可算出下一幀運(yùn)動(dòng)目標(biāo)可能出現(xiàn)的區(qū)域,加快運(yùn)動(dòng)目標(biāo)搜索匹配速度,實(shí)時(shí)性很強(qiáng),大大減少了計(jì)算量,節(jié)約內(nèi)存占用空間[4].
1.3.2均值漂移(Meanshift)算法
Meanshift算法以跟蹤目標(biāo)的顏色直方圖模型為基礎(chǔ),把圖像轉(zhuǎn)換為顏色概率分布圖.首先,對搜索窗口的大小、位置進(jìn)行初始化,再利用前一幀得到的數(shù)據(jù)自適應(yīng)修改搜索窗口的參數(shù),最后得出圖像中跟蹤目標(biāo)的位置[5].由于跟蹤的目標(biāo)對象是人,人體屬于非剛體運(yùn)動(dòng)對象,而Meanshift算法以目標(biāo)顏色直方圖為特征,該特征不容易受人體形狀在運(yùn)動(dòng)過程中發(fā)生縮放、旋轉(zhuǎn)等變化的影響,因此該算法在背景較為明確的情況下可以取得良好的跟蹤效果.
1.3.3Meanshift+Kalman綜合算法
Meanshift算法在大多數(shù)情況下是較為理想的,但實(shí)踐表明,如果跟蹤的目標(biāo)對象運(yùn)動(dòng)較快或突然出現(xiàn)嚴(yán)重遮擋,導(dǎo)致前后兩幀圖像變化很大時(shí),復(fù)雜性增加,這時(shí)的Bhattacharrya系數(shù)將下降至很低,在下降到某個(gè)值后,跟蹤目標(biāo)會(huì)失效.為克服該缺點(diǎn),將Kalman濾波器融入Meanshift算法中,避免在Bhattacharrya系數(shù)很低時(shí)失去跟蹤目標(biāo).為此,引入閾值=0.4,當(dāng)Bhattacharrya系數(shù)>閾值時(shí),表明運(yùn)動(dòng)目標(biāo)可在后續(xù)幀中用Meanshift算法跟蹤到,否則用Kalman算法代替.該算法設(shè)計(jì)流程圖如圖2所示.
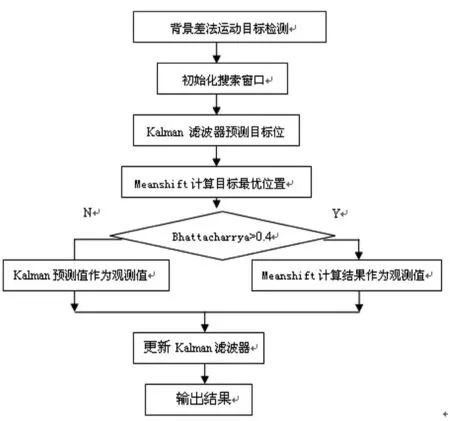
圖2 Meanshift+Kalman綜合算法流程圖
跟蹤結(jié)果及算法綜合前后的對比如圖3所示,當(dāng)跟蹤目標(biāo)即將失去時(shí),Kalman算法才作為第二替代算法.該綜合算法既保留了Meanshift算法在跟蹤非剛性物體方面的高效性,也克服了它在相鄰幀間變化較大時(shí)可能出現(xiàn)跟蹤失效情況的缺點(diǎn).

圖3 跟蹤結(jié)果
2運(yùn)動(dòng)目標(biāo)對象在數(shù)據(jù)挖掘中的應(yīng)用
利用數(shù)據(jù)挖掘技術(shù)分析處理已收集的監(jiān)控視頻圖像, 發(fā)現(xiàn)其中的異常序列,并對其發(fā)出預(yù)警.該應(yīng)用對決策管理者極具吸引力,有著廣泛的應(yīng)用前景.假設(shè)有若干特殊數(shù)據(jù)的行為和模式明顯不同于一般數(shù)據(jù),不符合普遍規(guī)律,這些特殊數(shù)據(jù)序列就是“異常”的[6].以往人們要找出異常部分,需要人工一個(gè)個(gè)鏡頭審閱,費(fèi)時(shí)費(fèi)力,并且可能遺漏部分異常.人工查看監(jiān)控視頻時(shí),可以迅速利用已學(xué)知識(shí)判斷視頻中的場景及目標(biāo)行為等高層次語義信息,而計(jì)算機(jī)只能從中獲取區(qū)域紋理、顏色等低層次圖像特征.數(shù)據(jù)挖掘技術(shù)正是在高層次語義信息和低層次圖像特征之間架設(shè)的一座橋梁,利用上述方法對運(yùn)動(dòng)目標(biāo)進(jìn)行檢測、跟蹤,提取目標(biāo)的運(yùn)動(dòng)軌跡特征,對各個(gè)目標(biāo)的軌跡集運(yùn)用數(shù)據(jù)挖掘技術(shù)的聚類分析方法可以實(shí)現(xiàn)對目標(biāo)的異常軌跡識(shí)別.
2.1對象特征提取

2.2聚類分析
聚類分析算法分析運(yùn)動(dòng)軌跡數(shù)據(jù)之間的相似性,將其合理地劃分為不同的類別.經(jīng)過聚類,劃分在同類中的數(shù)據(jù)之間相似性高,不同類別之間的數(shù)據(jù)相似性低.數(shù)據(jù)間的相似性是依據(jù)對象特征向量間的距離來衡量,距離無窮大的任意兩條軌跡分別屬于不同的類,并且同一聚類中的任意兩條軌跡之間的距離小于它與類外部軌跡間的距離.由上文對異常的定義可知,從運(yùn)動(dòng)軌跡集中抽取若干條軌跡,屬于異常軌跡的是個(gè)小概率事件,屬于正常軌跡的是個(gè)大概率事件,即異常是一種較少發(fā)生的軌跡序列[7].通過聚類分析后,個(gè)別異常軌跡即被篩選出來,提醒決策者予以重點(diǎn)關(guān)注,避免犯罪活動(dòng)的發(fā)生.如圖4所示的異常徘徊軌跡,需要管理者注意可疑分子的異常行動(dòng),對其實(shí)施重點(diǎn)跟蹤.

圖4 異常軌跡圖
3結(jié)語
通常,場景監(jiān)控視頻既無腳本,也無規(guī)則限制.對于這種無內(nèi)容結(jié)構(gòu)的視頻大都用于對目標(biāo)對象內(nèi)容自適應(yīng)事件的檢測挖掘.從視頻中檢測視頻對象, 利用改進(jìn)后的Meanshift+Kalman綜合算法跟蹤其運(yùn)動(dòng),提取運(yùn)動(dòng)軌跡數(shù)據(jù), 并進(jìn)一步設(shè)計(jì)了一個(gè)對目標(biāo)對象進(jìn)行聚類挖掘的模型,從中獲取有用的知識(shí)和信息,實(shí)現(xiàn)對異常行為軌跡的識(shí)別.該模型,只對獲取的對象運(yùn)動(dòng)軌跡數(shù)據(jù)進(jìn)行挖掘,不考慮視頻中的場景如圖像顏色、區(qū)域紋理等特征,簡化了數(shù)據(jù)維度,提高了數(shù)據(jù)挖掘效率.系統(tǒng)將數(shù)據(jù)挖掘技術(shù)與目標(biāo)檢測跟蹤算法相結(jié)合,而不僅僅是對目標(biāo)對象的跟蹤,因此隨著數(shù)據(jù)挖掘技術(shù)和目標(biāo)跟蹤算法的成熟將不斷地改進(jìn)系統(tǒng),尋求新算法,提高跟蹤準(zhǔn)確度及數(shù)據(jù)挖掘效率,還可參考用于其他相關(guān)領(lǐng)域,如交通分析系統(tǒng)、遠(yuǎn)程遙感、ATM監(jiān)控等[8],對大量的視頻數(shù)據(jù)進(jìn)行監(jiān)控和分析, 從中挖掘有用的潛在信息,盡可能地減少人為識(shí)別工作量,提高監(jiān)控智能化程度.
參考文獻(xiàn):
[1]辛國娟,杜秀華.視頻數(shù)據(jù)的時(shí)間序列挖掘方法研究[J].計(jì)算機(jī)仿真,2007,(11):100-113.
[2]代科學(xué),武德峰,付暢儉,等.中國圖象圖形學(xué)報(bào)[J].電信科學(xué),2006,(4):451-456.
[3]黃浩.基于GIS的視頻監(jiān)控框架設(shè)計(jì)與實(shí)現(xiàn)[D].杭州:浙江大學(xué)碩士學(xué)位論文,2011.
[4]袁燦.體育視頻分析中的運(yùn)動(dòng)挖掘方法研究[D].長沙:國防科學(xué)技術(shù)大學(xué)碩士學(xué)位論文,2011.
[5]陳麗.基于數(shù)據(jù)挖掘理論的跟蹤算法研究[D].上海:上海交通大學(xué)碩士學(xué)位論文,2013.
[6]袁冠.移動(dòng)對象軌跡數(shù)據(jù)挖掘方法研究[D]. 北京:中國礦業(yè)大學(xué)博士學(xué)位論文,2012.
[7]向?qū)W敏.基于Markov隨機(jī)場的視頻異常挖掘研究[D]. 南京:南京航空航天大學(xué)碩士學(xué)位論文,2012.
[8]邱靖邦.面向智能視頻監(jiān)控的事件監(jiān)測建模及優(yōu)化[D]. 上海:上海交通大學(xué)碩士學(xué)位論文,2011.
(責(zé)任編校:晴川)
Data Mining Based on Target Tracking
CAI Juanjuan
(College of the People’s Army, Fujian Normal University, Fuzhou Fujian 350007, China)
Abstract:A data mining model for the target object trajectory using clustering analysis algorithm based on detection algorithm of background subtraction and Meanshift + Kalman integrated algorithm tracking video moving object is proposed in the paper in allusion to the mining problem of moving target features in surveillance videos, whose data are of relatively fixed background.
Key Words:algorithm of background subtraction; Meanshift; Kalman; clustering analysis
中圖分類號:TP311
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號:1008-4681(2016)02-0057-03
作者簡介:蔡娟娟(1984— ),女,福建莆田人,福建師范大學(xué)人民武裝學(xué)院講師,碩士.研究方向:計(jì)算機(jī)應(yīng)用.
基金項(xiàng)目:福建省教育廳B類項(xiàng)目(批準(zhǔn)號:JB14235).
收稿日期:2015-12-01