考慮J2項(xiàng)攝動(dòng)的空間共振軌道特性分析
2016-05-07 07:55:44吝琳方群
西北工業(yè)大學(xué)學(xué)報(bào) 2016年1期
吝琳, 方群
(1.西北工業(yè)大學(xué) 航天學(xué)院, 陜西 西安 710072; 2.航天飛行動(dòng)力學(xué)技術(shù)國(guó)家級(jí)重點(diǎn)實(shí)驗(yàn)室, 陜西 西安 710072)
?
考慮J2項(xiàng)攝動(dòng)的空間共振軌道特性分析
吝琳1,2, 方群1,2
(1.西北工業(yè)大學(xué) 航天學(xué)院, 陜西 西安710072; 2.航天飛行動(dòng)力學(xué)技術(shù)國(guó)家級(jí)重點(diǎn)實(shí)驗(yàn)室, 陜西 西安710072)
摘要:共振軌道是建立在新型坐標(biāo)系下的非開(kāi)普勒軌道,應(yīng)用于空間機(jī)動(dòng)軌道的設(shè)計(jì),具有節(jié)省能量的優(yōu)勢(shì)。針對(duì)地球形狀攝動(dòng)J2項(xiàng)對(duì)共振軌道特性的影響分析問(wèn)題,建立了一種新的考慮J2項(xiàng)攝動(dòng)影響的共振軌道數(shù)學(xué)模型。通過(guò)與傳統(tǒng)受J2項(xiàng)攝動(dòng)影響的共振軌道數(shù)學(xué)模型的仿真對(duì)比分析可以看出,新的數(shù)學(xué)模型雖然形式較為復(fù)雜,但卻能夠揭示不同階段J2項(xiàng)攝動(dòng)使系統(tǒng)產(chǎn)生偏差的原因,比傳統(tǒng)模型更為精確,因此更適用于工程實(shí)際中分析J2項(xiàng)攝動(dòng)對(duì)共振軌道特性的影響。
關(guān)鍵詞:非開(kāi)普勒運(yùn)動(dòng);共振軌道;J2項(xiàng)攝動(dòng)
史格非[3]通過(guò)研究與仿真,一方面,說(shuō)明共振軌道的推力峰值遠(yuǎn)小于應(yīng)用Lambert轉(zhuǎn)移時(shí)所需的最小速度增量;另一方面,肯定了共振軌道在星際探測(cè)應(yīng)用中的可行性,并且證明了其在能量消耗方面優(yōu)于Lambert軌道。陳詩(shī)瑜引入J2攝動(dòng)和新的類(lèi)Sundman轉(zhuǎn)換關(guān)系,推導(dǎo)了參數(shù)平面下含J2攝動(dòng)的空間共振軌道方程及轉(zhuǎn)換矩陣,并分析了攝動(dòng)因素對(duì)軌道特性的影響。下文中,我們將陳詩(shī)瑜推導(dǎo)所得數(shù)學(xué)方程稱(chēng)為傳統(tǒng)數(shù)學(xué)模型,簡(jiǎn)稱(chēng)傳統(tǒng)模型。
然而,文獻(xiàn)[3]在進(jìn)行模型建立時(shí)并未考慮攝動(dòng)因素對(duì)軌道的影響。而傳統(tǒng)模型雖然考慮了J2項(xiàng)攝動(dòng)力對(duì)軌道的影響問(wèn)題,但在建立數(shù)學(xué)模型時(shí),忽略了J2項(xiàng)攝動(dòng)內(nèi)所含的位置矢量r,而將J2項(xiàng)攝動(dòng)看做標(biāo)量,這樣所得結(jié)果不是很精確。
針對(duì)上述問(wèn)題,本文在傳統(tǒng)模型的研究基礎(chǔ)上,利用KS變換,將J2項(xiàng)攝動(dòng)看做矢量,考慮其所含位置矢量r對(duì)軌道特性的影響,建立一種新的考慮J2項(xiàng)攝動(dòng)影響的共振軌道數(shù)學(xué)模型,隨后,采用本文提出數(shù)學(xué)模型,進(jìn)行了J2攝動(dòng)因素對(duì)軌道特性影響的仿真分析,并與傳統(tǒng)模型的仿真結(jié)果進(jìn)行比較,結(jié)果表明:2種受攝共振軌道模型的仿真結(jié)果變化趨勢(shì)相同,但由于所考慮的影響因素有所不同,因而導(dǎo)致偏差的具體變化程度不同;另外,由于考慮了J2項(xiàng)攝動(dòng)方向?qū)壍捞匦缘挠绊?本文所建立的模型比傳統(tǒng)模型更為精確,更適用于工程實(shí)際中分析J2項(xiàng)攝動(dòng)對(duì)共振軌道特性的影響。
1受J2項(xiàng)攝動(dòng)影響的傳統(tǒng)共振軌道建模
地球是一質(zhì)量分布不均勻、形狀也不規(guī)則的橢球體,這使得航天器在軌運(yùn)行時(shí),不僅受到徑向引力的作用,在軌道的切線(xiàn)和法線(xiàn)方向也會(huì)受到攝動(dòng)力的作用,這些附加的切向、法向力因素統(tǒng)稱(chēng)為地球形狀攝動(dòng)。
地球引力場(chǎng)位函數(shù)的一般表達(dá)式見(jiàn)(1)式:
(1)

若只考慮J2項(xiàng)攝動(dòng),則位函數(shù)可簡(jiǎn)化為:
(2)
航天器在中心引力,J2攝動(dòng)力和推力作用下的非開(kāi)普勒運(yùn)動(dòng)微分方程為:
(3)
通過(guò)定義新的時(shí)間尺度和軌道描述參數(shù),將(3)式中物理平面地心赤道坐標(biāo)系下航天器的運(yùn)動(dòng)微分方程,經(jīng)過(guò)數(shù)學(xué)變換,可以改為參數(shù)平面內(nèi)的受迫振動(dòng)方程。
傳統(tǒng)模型在推導(dǎo)過(guò)程中,忽略了fJ2的方向,將其看做標(biāo)量進(jìn)行推導(dǎo),得到的結(jié)果為:
(4)
式中,M為轉(zhuǎn)換矩陣:
(5)
q為參數(shù)平面內(nèi)的推力加速度,稱(chēng)為準(zhǔn)推力加速度。取q為簡(jiǎn)諧振動(dòng)信號(hào),則有
(6)
由(4)式和(6)式可以看出,當(dāng)準(zhǔn)推力加速度q各分量的頻率與固有頻率一致時(shí),即可產(chǎn)生共振。
2考慮J2項(xiàng)攝動(dòng)方向影響的共振軌道建模


航天器在中心引力、J2項(xiàng)攝動(dòng)力和推力作用下的非開(kāi)普勒運(yùn)動(dòng)微分方程如(3)式所示。引入新的時(shí)間尺度廣義偏近點(diǎn)角s,其與物理時(shí)間t的關(guān)系為
(7)
則有
(8)
(9)
y=2(u1u2-u3u4)
z=2(u1u3+u2u4)
(10)
(11)
式中
(12)
另一方面,根據(jù)KS變換的性質(zhì)有:


(13)


(14)
將(14)式等號(hào)左右兩邊左乘LT(u)整理得:
(15)
(15)式即為考慮J2項(xiàng)攝動(dòng)方向影響的新型共振軌道數(shù)學(xué)模型。可以看出,考慮fJ2中所含的矢量r之后所建立的模型中,fJ2被分為兩部分,一部分對(duì)系統(tǒng)固有頻率ω0產(chǎn)生干擾,另一部分對(duì)連續(xù)小推力產(chǎn)生干擾,從而使軌道偏離目標(biāo)位置,產(chǎn)生偏差。
為進(jìn)一步了解J2項(xiàng)攝動(dòng)對(duì)系統(tǒng)頻率的影響,假設(shè)(15)式中J2項(xiàng)攝動(dòng)對(duì)推力的影響為零,得到新的數(shù)學(xué)模型為
(16)
為方便起見(jiàn),我們稱(chēng)(15)式為受攝共振軌道模型,稱(chēng)(16)式為頻率受攝的共振軌道模型。對(duì)(15)式進(jìn)行仿真所得的航天器位置偏差稱(chēng)為整體偏差,對(duì)(16)式進(jìn)行仿真所得的航天器位置偏差為局部偏差。
3仿真分析
本文采用(15)式為數(shù)學(xué)模型,針對(duì)J2項(xiàng)攝動(dòng)因素對(duì)共振軌道特性的影響進(jìn)行分析。為比較方便,仿真初始參數(shù)與傳統(tǒng)模型仿真時(shí)所取參數(shù)相同,具體數(shù)值如表1和表2所示,參數(shù)平面下推力加速度q的形式如(6)式所示。
表1 初始軌道根數(shù)

表2 推力加速度的初始參數(shù)
仿真結(jié)果如圖1~圖6所示:
圖1和圖2分別為(u1,u3)和(u3,u4)參數(shù)平面內(nèi)的軌道圖像。可以看出,在J2項(xiàng)攝動(dòng)影響下,(u1,u3)參數(shù)平面內(nèi)的受攝共振軌道與理想共振軌道相比,軌道變寬,向外擴(kuò)展的程度減小。(u3,u4)參數(shù)平面內(nèi),受攝共振軌道向外擴(kuò)展的最大值減小,因此,J2項(xiàng)攝動(dòng)使得共振軌道的軌道形狀發(fā)生改變。
圖3到和圖4分別為仿真時(shí)間為50rad和400rad時(shí),受攝共振軌道在參數(shù)平面內(nèi)各個(gè)分量方向上的偏差。當(dāng)選擇偏心率為0.8時(shí),從仿真結(jié)果可以看出,初始階段,整體偏差隨時(shí)間積累,但偏差曲線(xiàn)不光滑,變化并不十分規(guī)律。從大約25rad開(kāi)始,偏差開(kāi)始保持在某一穩(wěn)定狀態(tài),甚至有略微的減少。到大約180rad時(shí),偏差開(kāi)始增長(zhǎng),增幅穩(wěn)定。
圖5、圖6為采用陳詩(shī)瑜推導(dǎo)所得的傳統(tǒng)模型,在同等條件下,得到的受攝共振軌道在參數(shù)平面內(nèi)各個(gè)分量方向上的偏差。
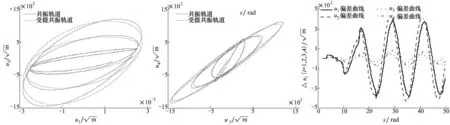
圖1 (u1,u3)平面下理想共振 圖2 (u3,u4)平面下理想共振圖3 50 rad內(nèi)參數(shù)平面各分量 軌道與受攝共振軌道 軌道與受攝共振軌道 方向上的整體偏差
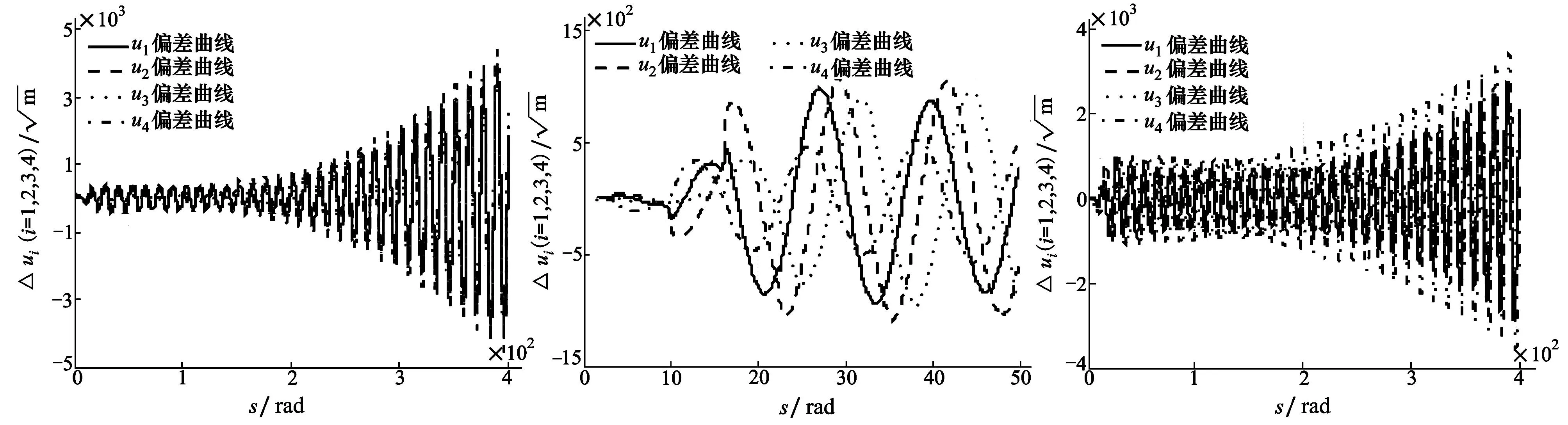
圖4 400 rad內(nèi)參數(shù)平面各分量 圖5 50 rad內(nèi)參數(shù)平面內(nèi)各個(gè)分量圖6 400 rad內(nèi)參數(shù)平面內(nèi)各個(gè) 方向上的整體偏差 方向上的偏差 分量方向上的偏差
由此可見(jiàn),采用本文所建模型得到的仿真結(jié)果,與傳統(tǒng)模型的仿真結(jié)果不同。其原因是由于J2項(xiàng)攝動(dòng)對(duì)系統(tǒng)頻率產(chǎn)生干擾,使系統(tǒng)頻率無(wú)法保持在0.5不變,而參數(shù)平面中的推力加速度分量仍選擇0.5為頻率以期達(dá)到共振的效果。這樣一來(lái),推力的頻率與系統(tǒng)表現(xiàn)出的頻率不相等,實(shí)際上并未產(chǎn)生共振,因此也無(wú)法依靠共振實(shí)現(xiàn)小輸入產(chǎn)生大的軌道變化以實(shí)現(xiàn)節(jié)省能源的效果。同時(shí),時(shí)間越長(zhǎng),二者差距越大,因此偏差也越來(lái)越大。
為進(jìn)一步深入分析J2項(xiàng)攝動(dòng)對(duì)固有頻率的影響,選(16)式為數(shù)學(xué)模型,取表1、表2中的初始參數(shù)進(jìn)行仿真,結(jié)果如圖7和圖8所示。
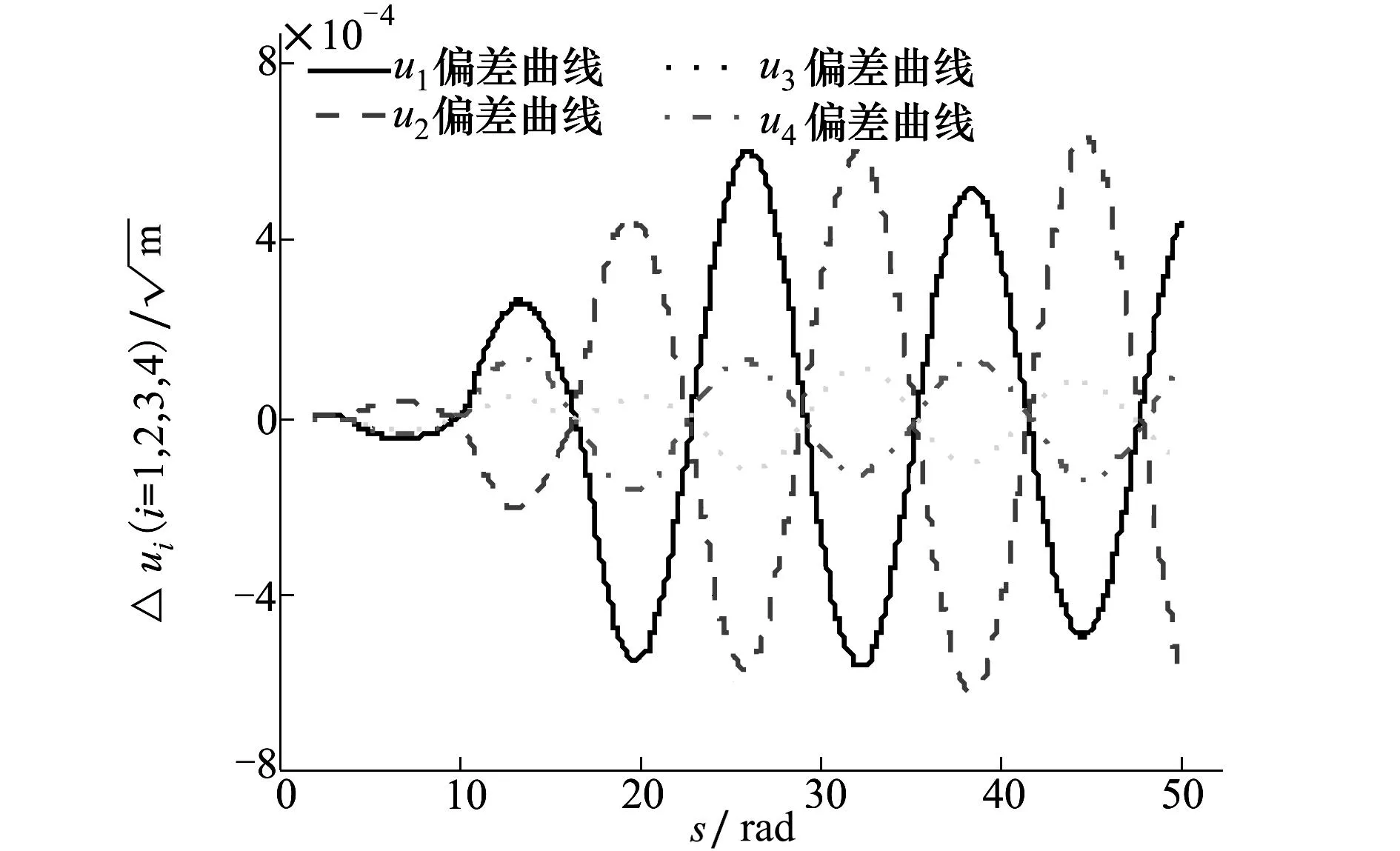
圖7 50 rad內(nèi)參數(shù)平面內(nèi)的局部偏差曲線(xiàn)
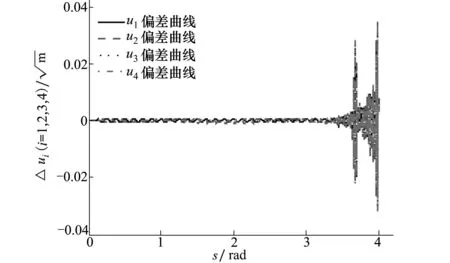
圖8 400 rad內(nèi)參數(shù)平面內(nèi)的局部偏差曲線(xiàn)

由圖4、圖6可以看出,大約前200rad,圖4的偏差峰值明顯小于圖6。其原因是由于在該階段,J2項(xiàng)攝動(dòng)對(duì)推力的干擾所產(chǎn)生的偏差占主要地位,從(15)式可以看出,J2項(xiàng)攝動(dòng)并不是將所有力都用來(lái)干擾推力,故與(4)式的模型相比,產(chǎn)生的偏差峰值較小。可是從200rad開(kāi)始,攝動(dòng)力對(duì)固有頻率的影響開(kāi)始變得越來(lái)越顯著,直接導(dǎo)致整體偏差明顯增大,因此400rad結(jié)束時(shí),圖4的偏差峰值大于圖6。由此可以進(jìn)一步看出,(15)式的數(shù)學(xué)模型更精確地揭示了J2項(xiàng)攝動(dòng)使系統(tǒng)產(chǎn)生偏差的原因。
綜合上述分析可以看出,考慮J2項(xiàng)攝動(dòng)中的參數(shù)r進(jìn)行推導(dǎo)所得的數(shù)學(xué)模型(15)式更準(zhǔn)確。另一方面,J2項(xiàng)攝動(dòng)對(duì)共振軌道的影響非常顯著,需要施加適當(dāng)?shù)目刂葡蛘呦魅跗鋵?duì)軌道特性的影響。
4結(jié)論
本文通過(guò)推導(dǎo),得到了一種新的受J2攝動(dòng)影響的共振軌道數(shù)學(xué)模型,并在此基礎(chǔ)上進(jìn)行仿真分析,研究了J2項(xiàng)攝動(dòng)因素對(duì)共振軌道特性的影響。通過(guò)與傳統(tǒng)受J2項(xiàng)攝動(dòng)影響的共振軌道數(shù)學(xué)模型進(jìn)行對(duì)比分析,確定了本文所建數(shù)學(xué)模型的價(jià)值。通過(guò)研究表明:
1)在大偏心率情況下,受攝共振軌道相對(duì)于理想共振軌道的偏差十分明顯。初始階段,整體偏差隨時(shí)間積累,偏差曲線(xiàn)不光滑,變換并不十分規(guī)律。從大約25rad開(kāi)始,偏差開(kāi)始保持在某一穩(wěn)定狀態(tài),甚至有略微的減少。從大約180rad時(shí)候,偏差開(kāi)始增長(zhǎng),增幅穩(wěn)定。偏差在仿真時(shí)間內(nèi)沒(méi)有收斂的趨勢(shì),增幅隨著時(shí)間增長(zhǎng)越來(lái)越大。
2)2種受攝共振軌道模型的仿真結(jié)果變化趨勢(shì)相同,但由于偏差的影響因素有差別,因而偏差的具體變化程度不同。(15)式表示的數(shù)學(xué)模型雖然形式較為復(fù)雜,無(wú)法得到解析解,但所得結(jié)果能夠解釋不同階段J2項(xiàng)攝動(dòng)使系統(tǒng)產(chǎn)生偏差的原因,因此更為精確。而(4)式所得結(jié)果僅趨勢(shì)正確,雖然形式簡(jiǎn)潔一些,但準(zhǔn)確度較低。若是對(duì)短時(shí)間的共振軌道進(jìn)行粗略估計(jì),可以選擇(4)式,但是若要精確求解,則建議采用(15)式。
3)J2項(xiàng)攝動(dòng)對(duì)共振軌道的影響非常顯著,需要施加適當(dāng)?shù)目刂葡蛳魅跗鋵?duì)軌道特性的影響。
參考文獻(xiàn):
[1]陳記爭(zhēng). 航天器非開(kāi)普勒軌道研究[D]. 西安: 西北工業(yè)大學(xué), 2010
ChenJizheng.ResearchonNon-KeplerianOrbitsforSpacecrafts[D].Xi′an,NorthwesternPolytechnicalUniversity, 2010 (inChinese)
[2]陳記爭(zhēng), 袁建平, 朱戰(zhàn)霞. 航天器共振軌道研究[J]. 宇航學(xué)報(bào), 2010, 31(1): 82-86
ChenJizheng,YuanJianping,ZhuZhanxia.ResonanceOrbitforSpacecrafts[J].JournalofAstronautic, 2010, 31(1): 82-86 (inChinese)
[3]史格非. 航天器共振軌道機(jī)理及設(shè)計(jì)方法研究[D]. 西安:西北工業(yè)大學(xué), 2014
ShiGefei.ResearchonResonanceOrbitsTheoryandDesignforSpacecrafts[D].Xi′an,NorthwesternPolytechnicalUniversity, 2010 (inChinese)
[4]史格非, 方群, 殷毅. 一般形式的共振軌道研究[J]. 力學(xué)與實(shí)踐, 2014, 36(5):1-6
ShiGefei,FangQun,YinYi.GeneralFormResonanceOrbits[J].MechanicsinEngineering, 2014, 36(5):1-6 (inChinese)
[5]史格非, 方群. 航天器共振軌道特性研究[J]. 飛行力學(xué), 2014, 32(4):334-337
ShiGefei,FangQun.AnalyzeandSimulationontheCharacteristicsofSpacecraftResonanceOrbit[J].FlightDynamics, 2014, 32(4): 334-337 (inChinese)
[6]FangQun,ShiGefei,YinYi.Spacecraft′sResonanceOrbitDesignandApplicationAnalysis[C]∥65thInternationalAstronauticalCongress,Toronto,Canada, 2014
[7]ChenShiyu,LinLin,FangQun.StudyonResonanceOrbitConsideringAirDrag[C]∥14thInternationalSpaceConferenceofPacific-BasinSocieties,Xi′an,China, 2014
[8]DanielCondurache,VladimirMartinusi.ACompleteClosedFormVectorialSolutiontotheKeplerProblem[J].Meccanica, 2007, 42: 465-476
[9]MariaDinaVivarelli.TheKS-TransformationRevisited[J].Meccanica, 1994, 29:15-26
[10]NemesF,Mik′ocziB.PerturbedKeplerProbleminGeneralRelativitywithQuaternions[J].InternationalJournalofModernPhysicsD, 2013, 22(8): 1-22
[11]LegE,GuzzoM,Froeschl′eC.DetectionofCloseEncountersandResonancesinThree-BodyProblemsthroughLevi-CivitaRegularization[J].MonNotRAstronSoc, 2011, 418: 107-113
[12]PrasenjitS.InterpretingtheKustaanheimo-StiefelTransforminGravtionalDynamics[J].MonNotRAstronSoc, 2009, 400: 228-231
[13]KatsuhikoYamada,TakeyaShima,ShojiYoshikawa.EffectofJ2PerturbationsonRelativeSpacecraftPositioninNear-CircularOrbits[J].JournalofGuidance,Control,andDynamics, 2010, 33(2): 584-590
[14] 馬慶甜. 連續(xù)小推力衛(wèi)星的幾種典型非開(kāi)普勒軌道設(shè)計(jì)[D]. 北京:清華大學(xué), 2011
MaQingtian.DesignofSeveralTypicalNon-KeplerianOrbitsforSatellitewithContinuousLow-thrust[D].Beijing,TsinghuaUniversity, 2011 (inChinese)
[15] 李俊峰, 孟鑫, 高云峰, 李響. J2攝動(dòng)對(duì)編隊(duì)飛行衛(wèi)星相對(duì)軌道構(gòu)形的影響[J]. 清華大學(xué)學(xué)報(bào):自然科學(xué)版, 2004, 44(2): 224-251
LiJunfeng,MengXin,GaoYunfeng,LiXiang. J2PerturbationEffectonRelativeOrbitalConfigurationofSatellitesinFormationFlying[J].JTsinghuaUniv(Sci&Tech,) 2004, 44(2): 224-251 (inChinese)
Studying Spacial Resonance Orbit withJ2Perturbation Considered
Lin Lin1,2, Fang Qun1,2
(1.College of Astronautics,Northwestern Polytechnical University,Xi'an 710072,China 2.National Laboratory of Aerospace Flight Dynamics,Xi'an 710072,China)
Abstract:The spacial resonance orbit is a non-Keplerian orbit created in a new coordinate system. It can be applied to the design of the spacial maneuvering orbit and has the advantage of saving fuel. For the spacial resonance orbit affected by J2 perturbation, a new perturbed model, applied to random inherent frequency, is developed in this paper. And then, the J2 perturbation effect on the resonance orbit characteristic is analyzed with simulation. Compared with thesimulation of the traditional perturbed model, it shows that although the new perturbed model has a more complex form, it can explain the source of differences in different stages. So it is more accurate and can analyze the J2 perturbation effect on the resonance orbit characteristic, better.
Keywords:acceleration, computer simulation, design, diffential equations, fuels, functions, maneuverability, mathematical models, mathematical transformations, matrix algebra, natural frequencies, orbits polynomicals, resonance, spacecraft, vectors, vibrations(mechanical); J2 perturbation, non-Keplerian, resonance orbit
中圖分類(lèi)號(hào):V212.1
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1000-2758(2016)01-0147-06
作者簡(jiǎn)介:吝琳(1990—),女,西北工業(yè)大學(xué)碩士研究生,主要從事飛行力學(xué)與控制的研究。
基金項(xiàng)目:國(guó)家自然科學(xué)基金(11272255)資助
收稿日期:2015-03-17
