差值定理在離散數(shù)據(jù)一階導(dǎo)數(shù)解算中的應(yīng)用
2016-05-07 07:56:04梁紅
西北工業(yè)大學(xué)學(xué)報(bào) 2016年1期
梁紅
(中國(guó)人民解放軍91550部隊(duì)94分隊(duì), 遼寧 大連 116023)
?
差值定理在離散數(shù)據(jù)一階導(dǎo)數(shù)解算中的應(yīng)用
梁紅
(中國(guó)人民解放軍91550部隊(duì)94分隊(duì), 遼寧 大連116023)
摘要:針對(duì)差值定理在離散數(shù)據(jù)一階導(dǎo)數(shù)解算中易受測(cè)量誤差影響而導(dǎo)致一些測(cè)量數(shù)據(jù)難以獲得解算結(jié)果的問(wèn)題,對(duì)差值定理的適用條件進(jìn)行了解析,更正了已有文獻(xiàn)中的錯(cuò)誤,并對(duì)其應(yīng)用方法進(jìn)行了分析和推導(dǎo),提出了基于極值點(diǎn)判別原則下差值定理與最小二乘算法相結(jié)合并對(duì)三次擬合多項(xiàng)式的一次項(xiàng)系數(shù)和二次項(xiàng)系數(shù)進(jìn)行調(diào)整的一種新的離散數(shù)據(jù)一階導(dǎo)數(shù)解算方法,給出了等間隔采樣條件下的計(jì)算公式。仿真數(shù)據(jù)和實(shí)測(cè)數(shù)據(jù)驗(yàn)證結(jié)果表明,新算法能夠?qū)y(cè)量序列不包括端點(diǎn)在內(nèi)的所有數(shù)據(jù)的一階導(dǎo)數(shù)進(jìn)行有效解算,解算結(jié)果不受測(cè)量誤差限的影響,且解算精度總體上優(yōu)于不進(jìn)行多項(xiàng)式系數(shù)調(diào)整的情況,使差值定理能夠更好地進(jìn)行工程化應(yīng)用,可顯著改善測(cè)量序列端點(diǎn)附近和劇烈變化段一階導(dǎo)數(shù)解算精度差的狀況。
關(guān)鍵詞:差值定理;微分;一階導(dǎo)數(shù);數(shù)字濾波;截?cái)嗾`差
一階導(dǎo)數(shù)的解算有著十分廣泛的應(yīng)用,比如,在氣象、化學(xué)、地質(zhì)學(xué)、航空航天、工程力學(xué)、機(jī)械制造等眾多領(lǐng)域都有很高的應(yīng)用價(jià)值。在這些工程應(yīng)用中,測(cè)量數(shù)據(jù)經(jīng)常以離散點(diǎn)的形式給出,往往需要用近似函數(shù)對(duì)其進(jìn)行擬合,并進(jìn)行微分,才能獲得其一階導(dǎo)數(shù)。在應(yīng)用數(shù)學(xué)領(lǐng)域,像這樣通過(guò)離散點(diǎn)上的觀測(cè)值來(lái)求取觀測(cè)量的近似(偏)導(dǎo)數(shù)問(wèn)題稱為數(shù)值微分問(wèn)題[1]。數(shù)值微分往往是不適定的[1]。由于測(cè)量數(shù)據(jù)變化規(guī)律的復(fù)雜性、擬合模型的近似性、算法的局限性以及測(cè)量誤差的影響,要獲得準(zhǔn)確的計(jì)算結(jié)果具有相當(dāng)?shù)碾y度,因此,離散數(shù)據(jù)的一階導(dǎo)數(shù)解算在某些領(lǐng)域一直是工程計(jì)算中的難點(diǎn)。
為了能夠?qū)y(cè)量數(shù)據(jù)進(jìn)行盡可能準(zhǔn)確的微分,人們嘗試了許多方法以提高解算精度,主要有以下幾種方法:①盡量采用一些逼近程度好的模型,比如多項(xiàng)式最優(yōu)線性濾波[2]、分段曲線擬合[3];②采用一些正則化[1]調(diào)整算子,如積分算子[4];③采取一些特殊的技巧,如樣條擬合[5]、自適應(yīng)學(xué)習(xí)算法[6]等。這些算法的基本特征是用近似函數(shù)對(duì)測(cè)量數(shù)據(jù)進(jìn)行擬合,然后按照一定的原則在近似函數(shù)上找到一點(diǎn),把該點(diǎn)的微分結(jié)果作為測(cè)量數(shù)據(jù)在該點(diǎn)的微分結(jié)果,必要時(shí)對(duì)微分結(jié)果進(jìn)行優(yōu)化。通過(guò)多方努力,很多微分算法在理論上獲得了“最佳逼近”的效果,即在理論上無(wú)限趨近于“真值”。2004年,差值定理及其推論[7]的發(fā)現(xiàn),從另一個(gè)角度改善了“最佳逼近”的效果,以至于在理論上達(dá)到了“相等”,而非“無(wú)限逼近”,即在測(cè)量數(shù)據(jù)連續(xù)且可導(dǎo)、測(cè)量誤差為零的理想條件下,微分結(jié)果與“真值”是相等的,為解決數(shù)值微分問(wèn)題提供了良好的途徑。由于采用差值定理及其推論對(duì)一階導(dǎo)數(shù)進(jìn)行解算時(shí),算法誤差為零,使得不適定問(wèn)題轉(zhuǎn)化為了適定問(wèn)題,獲得了理想情況下數(shù)值微分的精確解,因此具有很大的優(yōu)越性,在離散數(shù)據(jù)一階導(dǎo)數(shù)解算的實(shí)際應(yīng)用中,不僅能有效降低數(shù)據(jù)劇烈變化段微分求導(dǎo)的截?cái)嗾`差,而且受近似函數(shù)的形式及擬合區(qū)間的大小等因素的影響很小,解算精度很高,具有良好的適應(yīng)性、穩(wěn)定性。但是,在工程實(shí)踐中,實(shí)測(cè)數(shù)據(jù)所包含的測(cè)量誤差不僅會(huì)降低計(jì)算結(jié)果的準(zhǔn)確度,而且可能導(dǎo)致某些測(cè)量數(shù)據(jù)不滿足差值定理的應(yīng)用條件,無(wú)法得到一階導(dǎo)數(shù),因此,怎樣才能減小或消除測(cè)量誤差的影響,獲得理想的解算結(jié)果就成了需要研究的課題。本文立足于此,對(duì)差值定理用于離散數(shù)據(jù)一階
導(dǎo)數(shù)解算的適用條件進(jìn)行了分析和比較,找到了比較實(shí)用的算法。
1差值定理及其物理意義
差值定理的基本內(nèi)容是:設(shè)函數(shù)F(t)和f(t)在某定義域Ω內(nèi)的任一點(diǎn)均存在n階導(dǎo)數(shù),且G(t)=F(n-1)(t)-f(n-1)(t),則F(n)(t0)=f(n)(t0) ?G′(t0)=0 (t0∈Ω)。其推論為:設(shè)函數(shù)G(t)=F(t)-f(t)的定義域?yàn)棣?且函數(shù)F(t)和f(t)的一階導(dǎo)數(shù)、二階導(dǎo)數(shù)均存在,則F′(t1)=f′(t1)?G′(t1)=0(t1∈Ω)且F″(t2)=f″(t2)?G″(t2)=0(t2∈Ω)。
對(duì)于差值定理及其推論的物理意義,文獻(xiàn)[7]中的表述為“差值定理表明:2個(gè)函數(shù)n階導(dǎo)數(shù)相等的點(diǎn)是它們的n-1階導(dǎo)數(shù)的差值的極值點(diǎn);其推論表明:2個(gè)函數(shù)的一階導(dǎo)數(shù)相等的點(diǎn)是它們的差值曲線的極值點(diǎn),二階導(dǎo)數(shù)相等的點(diǎn)是它們的差值曲線的拐點(diǎn)”。該表述忽略了“導(dǎo)數(shù)為零的點(diǎn)不一定是極值點(diǎn)”的特殊情況。因此,差值定理及其推論的物理意義應(yīng)表述為“2個(gè)函數(shù)的n-1階導(dǎo)數(shù)的差值的駐點(diǎn)是它們的n階導(dǎo)數(shù)相等的點(diǎn);2個(gè)函數(shù)的差值曲線的駐點(diǎn)是它們的一階導(dǎo)數(shù)相等的點(diǎn),差值曲線的拐點(diǎn)是它們的二階導(dǎo)數(shù)相等的點(diǎn)。”由于極值點(diǎn)即為駐點(diǎn),所以,應(yīng)用差值定理及其推論進(jìn)行一階導(dǎo)數(shù)解算時(shí),只要求出測(cè)量數(shù)據(jù)與擬合數(shù)據(jù)的差值曲線的極值點(diǎn),即可把擬合數(shù)據(jù)在該極值點(diǎn)處的一階導(dǎo)數(shù)作為測(cè)量數(shù)據(jù)在該點(diǎn)的微分結(jié)果。在工程實(shí)際中,判別差值曲線的極值點(diǎn)比判別其他形式的駐點(diǎn)更容易把握,因此,本文主要基于極值點(diǎn)進(jìn)行討論。
2差值定理的適用條件解析
2.1差值定理的適用條件
應(yīng)用差值定理及其推論進(jìn)行一階導(dǎo)數(shù)解算時(shí),判別差值曲線的極值點(diǎn)可嘗試采用如下2種判別條件:
式中:k-1表示差值曲線的極值點(diǎn)前一點(diǎn)的斜率,k+1表示差值曲線的極值點(diǎn)后一點(diǎn)的斜率。我們稱1)中的判別條件為“斜率判別條件”。
采用斜率判別條件時(shí),不需要知道差值曲線上每一點(diǎn)的斜率的確切值,而只需要知道與極值點(diǎn)相鄰的點(diǎn)的斜率孰大孰小即可。
式中:yi表示差值曲線的極值點(diǎn)的縱坐標(biāo),yi-1表示差值曲線的極值點(diǎn)前一點(diǎn)的縱坐標(biāo),yi+1表示差值曲線的極值點(diǎn)后一點(diǎn)的縱坐標(biāo)。我們稱2)中的判別條件為“極值判別條件”。
2.2斜率判別條件解析
根據(jù)1)中的判別條件,在不考慮測(cè)量誤差的情況下,可推出差值曲線上下標(biāo)為0的點(diǎn)是極大值點(diǎn)時(shí)
(1)下標(biāo)為0的點(diǎn)是極小值點(diǎn)時(shí)

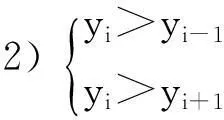
采用某組實(shí)測(cè)數(shù)據(jù),以(1)式和(2)式為差值定理及其推論的適用條件判別差值曲線的極值點(diǎn),進(jìn)行一階導(dǎo)數(shù)解算,改變對(duì)差值曲線進(jìn)行直線擬合的濾波半徑,將解算的數(shù)據(jù)點(diǎn)數(shù)列入表1。
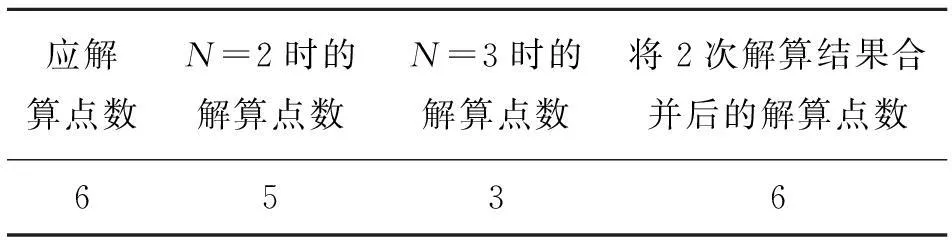
表1 某實(shí)測(cè)數(shù)據(jù)解算結(jié)果統(tǒng)計(jì)表
由表1可以看出,當(dāng)濾波半徑不變時(shí),并不是所有的測(cè)量點(diǎn)都能獲得一階導(dǎo)數(shù)的解算結(jié)果。

圖1 部分?jǐn)?shù)據(jù)無(wú)解算結(jié)果的原因分析示意圖
如圖1所示,在離散情況下,A為極值點(diǎn),而點(diǎn)B和點(diǎn)C的斜率均小于0,所以無(wú)法正確判別出極值點(diǎn)。因此,當(dāng)離散點(diǎn)出現(xiàn)如圖1所示的極限情況時(shí),極值點(diǎn)A不能夠被有效判別。這是表1中有一些數(shù)據(jù)點(diǎn)沒(méi)有解算結(jié)果的原因。
由表1可知,將不同濾波半徑的解算結(jié)果合并后,則可能獲得所有測(cè)量數(shù)據(jù)的一階導(dǎo)數(shù)解算結(jié)果,也就是說(shuō),調(diào)節(jié)直線擬合的濾波半徑后重新解算,可以彌補(bǔ)原來(lái)未解算出來(lái)的數(shù)據(jù)。
由(1)式和(2)式可以看出,當(dāng)測(cè)量數(shù)據(jù)等間隔采樣時(shí),若采用中心平滑直線擬合法求解測(cè)量數(shù)據(jù)與近似擬合函數(shù)的差值曲線上的極值點(diǎn),則判別條件與采樣間隔的大小無(wú)關(guān),與測(cè)量值、近似函數(shù)值和直線擬合的濾波半徑有關(guān)。因此,調(diào)節(jié)濾波半徑N,有可能使判別極值點(diǎn)的充要條件得到滿足,從而使一些無(wú)法解算的測(cè)量數(shù)據(jù)獲得一階導(dǎo)數(shù)解算結(jié)果。
對(duì)于離散數(shù)據(jù)極值點(diǎn)的判別條件是取目標(biāo)點(diǎn)的前一點(diǎn)和后一點(diǎn)各自的斜率是否為異號(hào),這其實(shí)是一種比較模糊的判別方法。當(dāng)采樣率足夠大時(shí),這種算法判別得到的所謂“極值點(diǎn)”是真正的極值點(diǎn)的臨近的一個(gè)離散點(diǎn),而且,由于受斜率判別的影響,該點(diǎn)不一定是離散點(diǎn)中的“極值點(diǎn)”,如圖2所示。
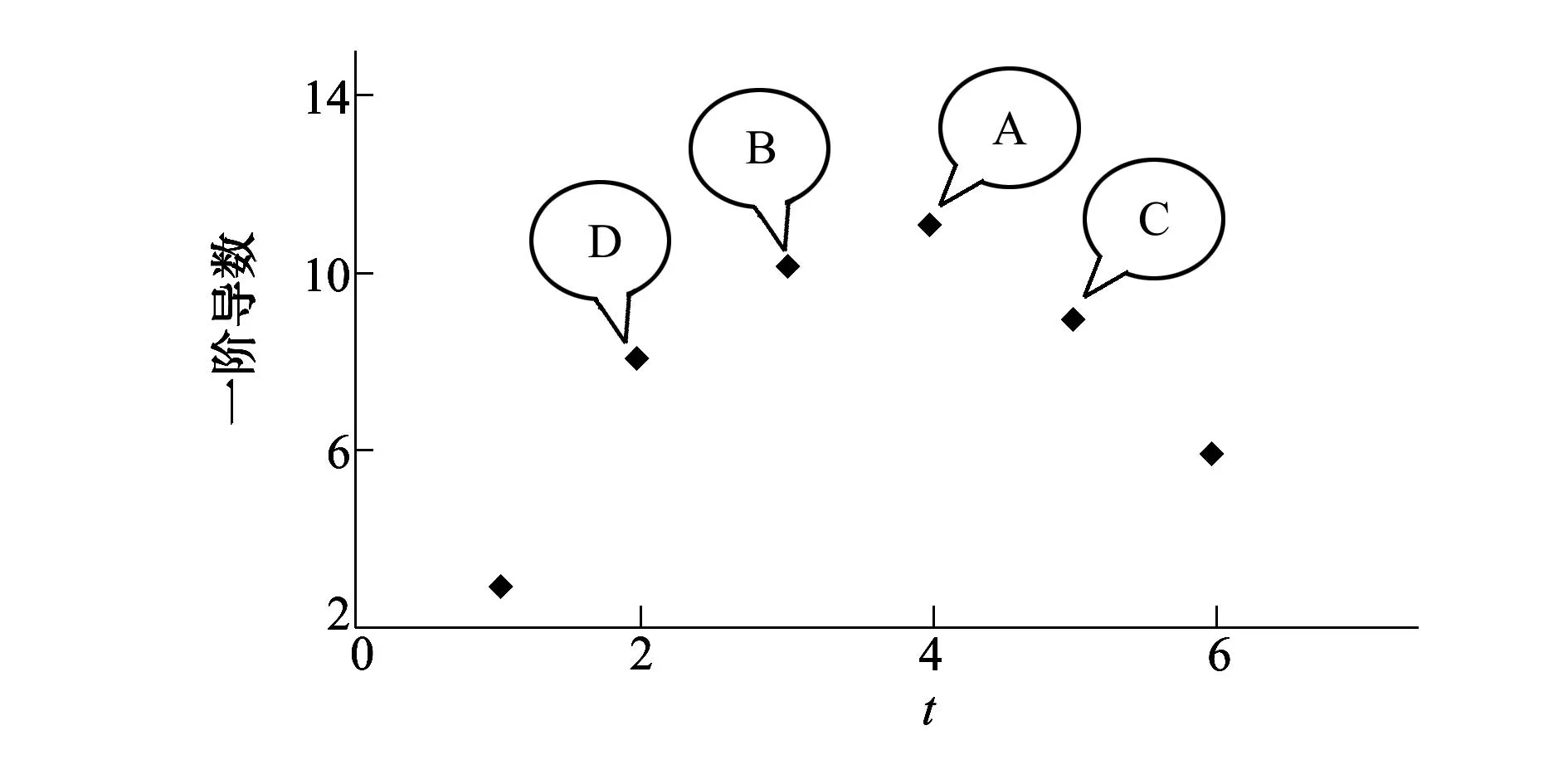
圖2 極值點(diǎn)分析示意圖
在圖2中,目測(cè)很明顯點(diǎn)A為離散點(diǎn)中的極值點(diǎn),但點(diǎn)D處的斜率為正值,點(diǎn)A處的斜率為負(fù)值,若按照判斷條件,則點(diǎn)B為極值點(diǎn),顯然與實(shí)際情況不符。因此,從嚴(yán)格意義上講,“目標(biāo)點(diǎn)的前一點(diǎn)和后一點(diǎn)各自的斜率異號(hào)”只是判別極值點(diǎn)的必要條件,而非充分條件。
2.3極值判別條件解析
根據(jù)2)中的判別條件,可推出差值曲線上下標(biāo)為i的點(diǎn)是極大值點(diǎn)的充要條件是
(3)
是極小值點(diǎn)的充要條件是
(4)
是極大值點(diǎn)的充分條件是
(5)是極小值點(diǎn)的充分條件是
2.4極值點(diǎn)的屬性
由于測(cè)量數(shù)據(jù)往往是離散的,差值曲線的極值點(diǎn)受測(cè)量值和擬合值的影響,可能位于離散點(diǎn)處,也可能位于2個(gè)離散點(diǎn)之間,故使用上述方法判斷出來(lái)的極值點(diǎn)并不一定是真正的“極大值點(diǎn)”或“極小值點(diǎn)”,而極有可能是真正的極值點(diǎn)附近的比較接近于極值點(diǎn)的離散點(diǎn),在測(cè)量數(shù)據(jù)的差值曲線上,我們僅近似地把它看作是極值點(diǎn)。因此,稱文中所說(shuō)的極值點(diǎn)為“近似極大值點(diǎn)”或“近似極小值點(diǎn)”更為貼切。
3差值定理的應(yīng)用方法
3.1分析與推導(dǎo)
上述分析表明,當(dāng)差值曲線極值點(diǎn)與其鄰點(diǎn)數(shù)值之差大于測(cè)量誤差限的2倍時(shí),斜率法可能會(huì)造成極值點(diǎn)的誤判;當(dāng)差值曲線極值點(diǎn)與其鄰點(diǎn)數(shù)值之差小于測(cè)量誤差限的2倍時(shí),極值點(diǎn)不能確定。故在測(cè)量誤差允許的情況下采用極大或極小值的直接判別法,比斜率參與判別的方法更有效。因此,推薦使用極值判別條件,當(dāng)求出擬合值F(t)后,根據(jù)(5)式和(6)式找到差值曲線的近似極值點(diǎn),即可根據(jù)差值定理得到該點(diǎn)的一階導(dǎo)數(shù)。
由于利用差值定理解算一階導(dǎo)數(shù)時(shí),測(cè)量數(shù)據(jù)在差值曲線極值點(diǎn)處的一階導(dǎo)數(shù)值由擬合曲線在該點(diǎn)的一階導(dǎo)數(shù)值決定,所以在極值點(diǎn)處,測(cè)量數(shù)據(jù)的一階導(dǎo)數(shù)的解算精度只與測(cè)量值的一階導(dǎo)數(shù)和擬合曲線的一階導(dǎo)數(shù)的局部接近程度有關(guān),因此,考慮2點(diǎn):①采用最小二乘法來(lái)構(gòu)造擬合曲線F(t),使之與測(cè)量曲線有較好的接近程度,且由于利用差值定理進(jìn)行一階導(dǎo)數(shù)解算時(shí),解算精度受擬合模型的影響較小,因此,綜合考慮解算精度和解算速度,可采用三次多項(xiàng)式作為擬合模型;②考慮到測(cè)量數(shù)據(jù)是離散的,很可能會(huì)導(dǎo)致判斷出來(lái)的差值曲線的極值點(diǎn)偏離真正的極值點(diǎn)而引起一階導(dǎo)數(shù)的解算結(jié)果產(chǎn)生誤差,為盡量減小這種誤差,應(yīng)使差值曲線極值點(diǎn)附近擬合曲線與測(cè)量曲線的曲率有較好的吻合度,即應(yīng)使擬合值盡可能滿足或接近(7)式
(7)

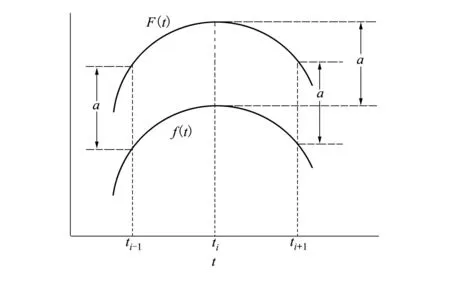
圖3 曲率吻合示意圖

故

即在極值點(diǎn)附近擬合曲線與測(cè)量數(shù)據(jù)的真值曲線二者的一階導(dǎo)數(shù)和二階導(dǎo)數(shù)均相同,由曲率的計(jì)算公式
可知,二者的曲率也相同,因此,(7)式確保了數(shù)據(jù)離散時(shí)在極值點(diǎn)附近二者的曲率有較好的吻合度。
將(7)式與(3)式和(4)式比較可知,(7)式是(3)式和(4)式的極限情況,因此可合成下式:
(8)
或
(9)
(8)式及(9)式即為滿足差值定理?xiàng)l件,使得擬合值與測(cè)量值的差值曲線的一階導(dǎo)數(shù)為零的點(diǎn),一般為極值點(diǎn),也可能是其它形式的駐點(diǎn)。
若有的點(diǎn)在差值曲線上沒(méi)有對(duì)應(yīng)的駐點(diǎn),雖然可通過(guò)改變擬合區(qū)間的長(zhǎng)度或擬合模型來(lái)使該點(diǎn)成為駐點(diǎn),但在工程應(yīng)用上難以把握,因此,考慮采用系數(shù)調(diào)節(jié)法來(lái)改變多項(xiàng)式的系數(shù),使得該點(diǎn)成為駐點(diǎn)。

(10)在a0、a1、a2、a3這4個(gè)系數(shù)中,常數(shù)項(xiàng)a0對(duì)于F(t)的一階導(dǎo)數(shù)沒(méi)有影響,而若改變a2和(或)a3,則很可能會(huì)改變擬合曲線F(t)的彎曲程度,也就改變了擬合曲線與測(cè)量曲線在該點(diǎn)局部性能的接近程度,使得一階導(dǎo)數(shù)解算精度被改變。這種改變雖然在總體上是穩(wěn)定的,但在小范圍內(nèi)既可能使精度提高,又可能使精度降低,因此,為了使解算精度在小范圍內(nèi)仍保持穩(wěn)定,擬采用盡可能調(diào)整低次項(xiàng)系數(shù)的方法,比如調(diào)整a1或a2。
將(10)式代入(8)式和(9)式,得
即
(11)
(12)
當(dāng)|si|≤S時(shí),由(11)式得
(13)
由(12)式得
(14)
由(11)式可知,若a3一定,則當(dāng)
(15)
時(shí),a1有解。
假設(shè)測(cè)量數(shù)據(jù)為等間隔采樣,則(15)式可化為
故
(16)把測(cè)量誤差限S代入(16)式,得
(17)同理,對(duì)于(12)式,有
(18)由(7)式和(10)式可知,當(dāng)a0、a3固定時(shí),若a1、a2是方程組的解,可使擬合曲線與測(cè)量曲線在點(diǎn)i附近的曲率獲得較好的吻合度。因此,a1與a2的取值應(yīng)盡可能滿足或接近(7)式的解。
由(7)式和(10)式得
(19)
當(dāng)a2取(17)式中的最大值時(shí), si+1=si-1=S,
si=-S,將其代入(19)式中,得方程組(7)的解是
(20)
同理,當(dāng)a2取(18)式中的最小值時(shí),si+1=si-1=-S,si=S,方程組(7)的解是
(21)
上述分析表明:按(13)式、(17)式或(14)式、(18)式選取a1、a2的值,可使沒(méi)有在差值曲線上取到近似駐點(diǎn)的測(cè)量數(shù)據(jù)能夠取到近似駐點(diǎn);按(20)式或(21)式可獲得更好效果,使擬合曲線與測(cè)量曲線在駐點(diǎn)附近的曲率盡可能接近或吻合。
綜上所述,利用差值定理進(jìn)行下標(biāo)為i的離散數(shù)據(jù)一階導(dǎo)數(shù)解算時(shí),可采用下列步驟:
1) 選取擬合區(qū)間,進(jìn)行最小二乘三次多項(xiàng)式擬合,獲得擬合多項(xiàng)式的系數(shù)A0、A1、A2、A3,它們分別表示常數(shù)項(xiàng)、一次項(xiàng)系數(shù)、二次項(xiàng)系數(shù)和三次項(xiàng)系數(shù);
2) 根據(jù)(20)式或(21)式確定調(diào)整后的系數(shù)a1、a2;
3) 計(jì)算擬合多項(xiàng)式F(t)=A0+a1t+a2t2+A3t3在點(diǎn)i處的一階導(dǎo)數(shù),即可作為該處測(cè)量數(shù)據(jù)的一階導(dǎo)數(shù)。
上述的系數(shù)調(diào)節(jié)法對(duì)于在差值曲線上能夠獲得近似駐點(diǎn)的測(cè)量數(shù)據(jù)也同樣適用,可使擬合曲線上該點(diǎn)附近的曲率與測(cè)量曲線的曲率盡可能接近或吻合,獲得更高的解算精度。因此,可依此計(jì)算擬合區(qū)間內(nèi)不包括端點(diǎn)的所有點(diǎn)的一階導(dǎo)數(shù)。
3.2仿真計(jì)算與討論
A0=87 930.576
A1=1 179.644
A2=-38.890
A3=0.434
將擬合結(jié)果列入表2,并將差值繪入圖4。
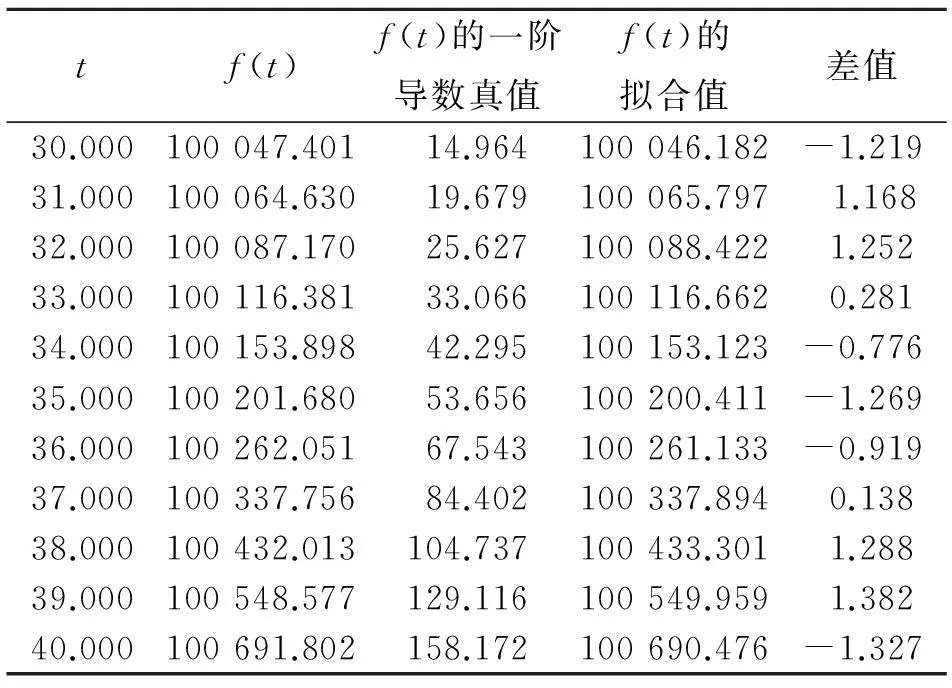
表2 仿真數(shù)據(jù)及其擬合結(jié)果
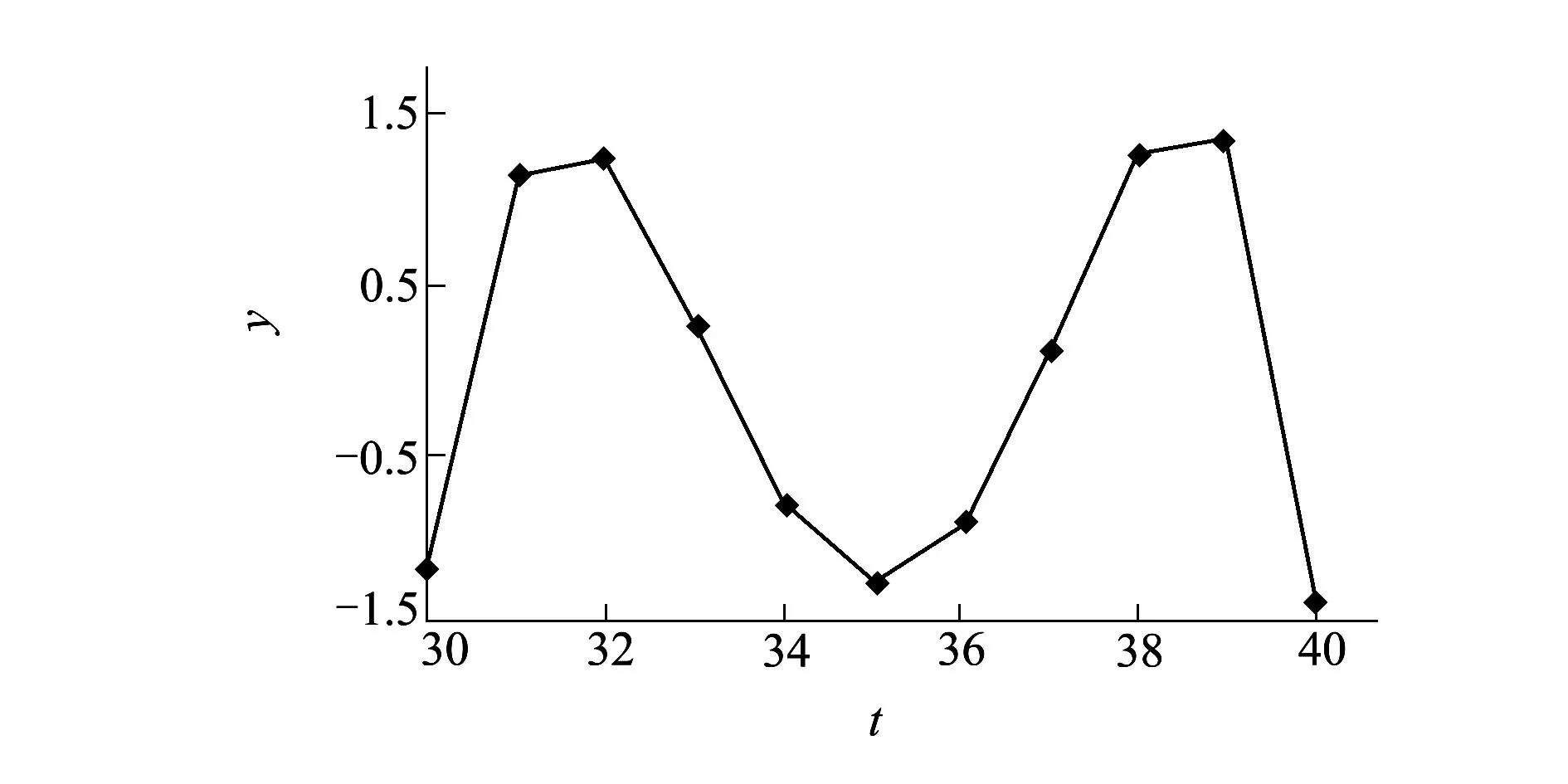
圖4 3次多項(xiàng)式擬合的差值曲線圖
如表2和圖4所示,差值曲線極值點(diǎn)的橫坐標(biāo)是t=32、35、39。以橫坐標(biāo)為37的點(diǎn)為例,利用(17)式和(13)式對(duì)擬合多項(xiàng)式A0+A1t+A2t2+A3t3的系數(shù)進(jìn)行調(diào)節(jié):在S=0.000 01的情況下,根據(jù)(17)式得
a2≤-38.936 792
取a2的值為-38.936 793。
根據(jù)(13)式得
1 181.986 670≤a1≤1 181.986 712
取a1=1 181.986 691。

表3 以t=37為目標(biāo)點(diǎn)調(diào)整多項(xiàng)式系數(shù)后的擬合結(jié)果
將A0=87 930.576 404 105、a1=1 181.987、a2=-38.937、A3=0.434 351 685作為擬合多項(xiàng)式系數(shù)進(jìn)行計(jì)算,結(jié)果列入表3,并將差值繪入圖5。

圖5 以t=37為目標(biāo)點(diǎn)調(diào)整多項(xiàng)式系數(shù)后的 差值曲線圖
由表3和圖5可看出,按(17)式和(13)式對(duì)擬合多項(xiàng)式的系數(shù)A1和A2進(jìn)行調(diào)整后,仿真數(shù)據(jù)與擬合多項(xiàng)式的差值曲線在t=37處以微小的差別獲得了極大值點(diǎn)。一階導(dǎo)數(shù)的解算結(jié)果為a1+2a2t+3A3t2=84.546,誤差為0.145,解算效果良好。
2) 取S=20.0,按照(20)式確定的多項(xiàng)式系數(shù)調(diào)節(jié)方法及3.1節(jié)中應(yīng)用差值定理對(duì)一階導(dǎo)數(shù)進(jìn)行解算的步驟,對(duì)表2中的仿真數(shù)據(jù)f(t)擬合區(qū)間中不包括端點(diǎn)的所有數(shù)據(jù)進(jìn)行一階導(dǎo)數(shù)計(jì)算,結(jié)果列入表4。
從表4中的數(shù)據(jù)可以看出,采用3.1節(jié)中的方法的確可以構(gòu)造三次多項(xiàng)式,使擬合區(qū)間中不包括端點(diǎn)在內(nèi)的任一點(diǎn)成為差值曲線的極值點(diǎn),且解算精度及穩(wěn)定性總體上優(yōu)于未經(jīng)系數(shù)調(diào)節(jié)獲得的極值點(diǎn),并且使和端點(diǎn)臨近的點(diǎn)獲得幾乎同樣好的精度。
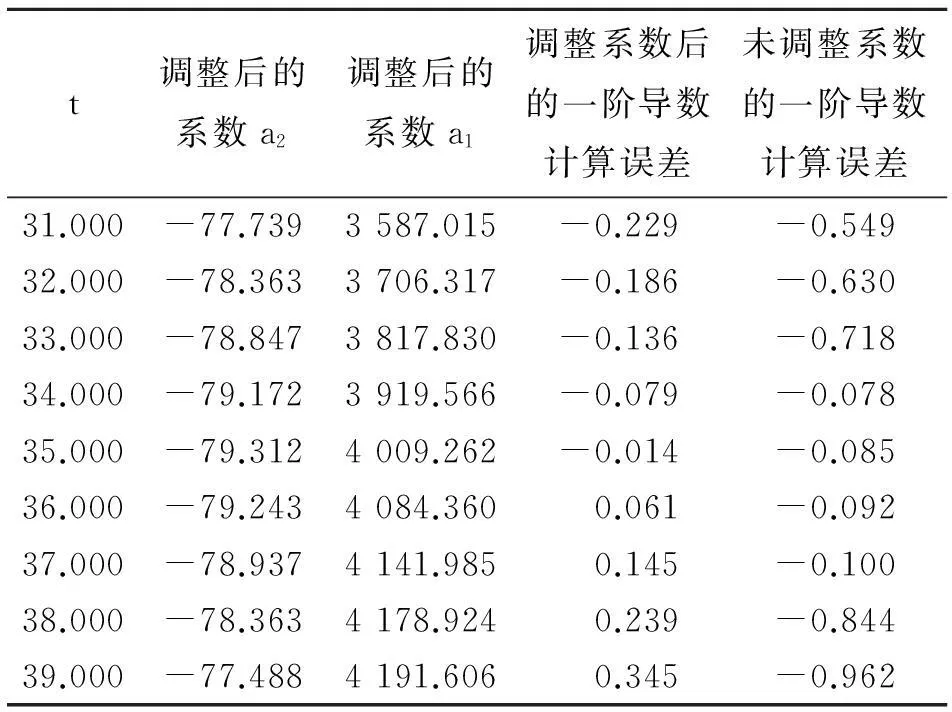
表4 仿真數(shù)據(jù)一階導(dǎo)數(shù)解算
3) 取不同的S值,按照(20)式確定的多項(xiàng)式系數(shù)調(diào)節(jié)方法及3.1節(jié)中應(yīng)用差值定理對(duì)一階導(dǎo)數(shù)進(jìn)行解算的步驟,對(duì)表2中的仿真數(shù)據(jù)f(t)擬合區(qū)間中不包括端點(diǎn)的所有數(shù)據(jù)進(jìn)行一階導(dǎo)數(shù)計(jì)算,結(jié)果列入表5。

表5 不同測(cè)量誤差限時(shí)調(diào)整多項(xiàng)式系數(shù)后的
從表5中的數(shù)據(jù)可看出,當(dāng)采用3.1節(jié)中的步驟對(duì)一階導(dǎo)數(shù)進(jìn)行解算時(shí),測(cè)量精度對(duì)于計(jì)算結(jié)果沒(méi)有影響。
設(shè)采樣間隔為h,令
則(20)式對(duì)應(yīng)的方程組(7)式的解可表示為
或令
則(21)式對(duì)應(yīng)的方程組(7)式的解可表示為
故下標(biāo)為i的點(diǎn)的一階導(dǎo)數(shù)為
(22)
從(22)式中可看出,一階導(dǎo)數(shù)的解算結(jié)果與測(cè)量誤差限無(wú)關(guān),表明3.1節(jié)中的一階導(dǎo)數(shù)解算步驟基本可以消除測(cè)量誤差的影響。(22)式還表明一階導(dǎo)數(shù)的解算結(jié)果與a3的取值有關(guān),由于a3是在最小二乘條件下獲得的擬合多項(xiàng)式的系數(shù),從中可看出最小二乘算法為解算結(jié)果的準(zhǔn)確度所做出的巨大貢獻(xiàn)。
3.3實(shí)測(cè)數(shù)據(jù)驗(yàn)證
以(5)式或(6)式作為離散狀態(tài)差值曲線近似極值點(diǎn)的判斷條件,應(yīng)用差值定理及其推論,在不同的測(cè)量精度下,以10個(gè)測(cè)量點(diǎn)為擬合區(qū)間,以三次多項(xiàng)式作為擬合模型在最小二乘條件下對(duì)一組測(cè)量數(shù)據(jù)進(jìn)行一階導(dǎo)數(shù)解算;完成某個(gè)擬合區(qū)間的計(jì)算后,即把擬合區(qū)間向后移動(dòng)繼續(xù)計(jì)算,然后把各個(gè)區(qū)間的一階導(dǎo)數(shù)解算結(jié)果合并在一起,獲得整段數(shù)據(jù)的解算結(jié)果。解算結(jié)果的點(diǎn)數(shù)列入表6。
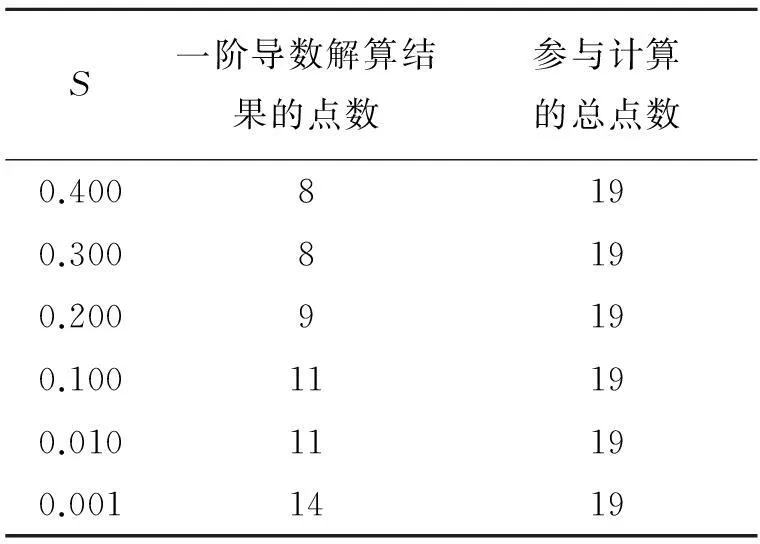
表6 實(shí)測(cè)數(shù)據(jù)解算結(jié)果統(tǒng)計(jì)表
將表6中S=0.001的解算結(jié)果繪入圖6。
將該組實(shí)測(cè)數(shù)據(jù)分為1~10點(diǎn)、9~18點(diǎn)2個(gè)區(qū)間,分別用最小二乘算法進(jìn)行三次多項(xiàng)式擬合,得到2段的系數(shù)分別為A3(1~10點(diǎn))=0.632,A3(9~18點(diǎn))=0.076,再根據(jù)(22)式計(jì)算一階導(dǎo)數(shù),將結(jié)果繪入圖7。
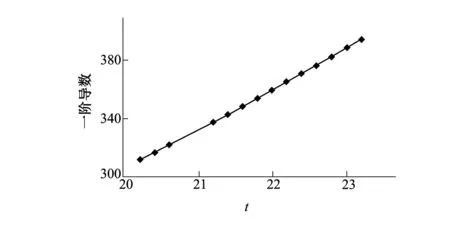
圖6 未調(diào)整多項(xiàng)式系數(shù)時(shí)的解算結(jié)果
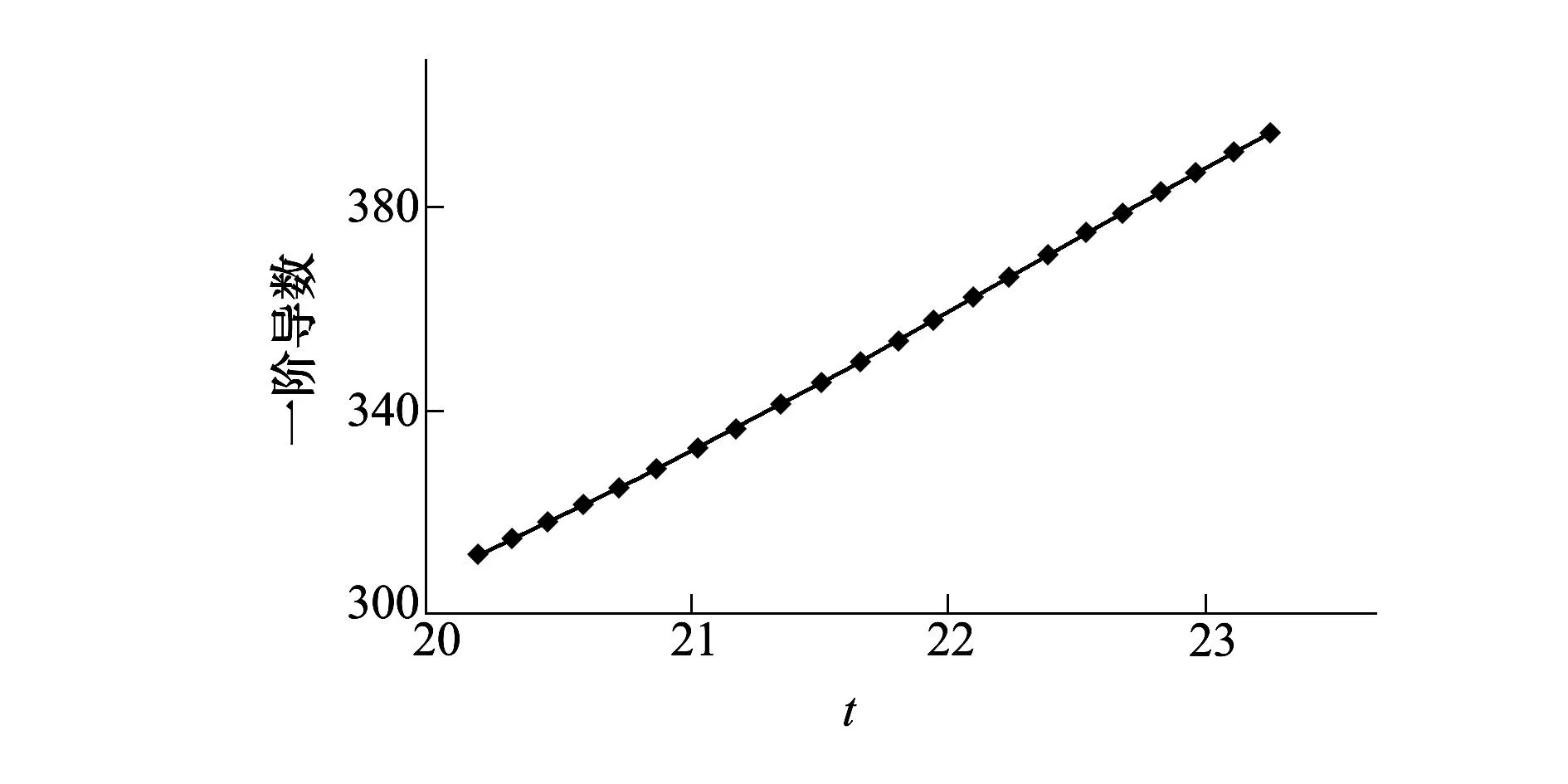
圖7 調(diào)整多項(xiàng)式系數(shù)后的解算結(jié)果
比較圖6和圖7可知,在最小二乘擬合條件下,采用(22)式進(jìn)行實(shí)測(cè)數(shù)據(jù)的一階導(dǎo)數(shù)解算,不僅能夠計(jì)算擬合區(qū)間內(nèi)不包括端點(diǎn)的所有點(diǎn)的一階導(dǎo)數(shù),而且解算精度良好。
4結(jié)論
差值定理及其推論在離散數(shù)據(jù)一階導(dǎo)數(shù)解算中的適用條件為:
1) 離散狀態(tài)差值曲線上下標(biāo)為 的點(diǎn)為近似極大值點(diǎn)的充要條件是(3)式,為近似極小值點(diǎn)的充要條件是(4)式。
2) 離散狀態(tài)差值曲線上下標(biāo)為i的點(diǎn)為近似極大值點(diǎn)的充分條件是(5)式,為近似極小值點(diǎn)的充分條件是(6)式。
3) 當(dāng)采用三次多項(xiàng)式對(duì)測(cè)量數(shù)據(jù)進(jìn)行最小二乘擬合時(shí),在等間隔采樣條件下,保持?jǐn)M合多項(xiàng)式的常數(shù)項(xiàng)和三次項(xiàng)系數(shù)不變,則按(13)式和(17)式調(diào)整一次項(xiàng)系數(shù)和二次項(xiàng)系數(shù),可使下標(biāo)為i的點(diǎn)成為差值曲線的極大值點(diǎn),按(14)式和(18)式調(diào)整一次項(xiàng)系數(shù)和二次項(xiàng)系數(shù),可使下標(biāo)為i的點(diǎn)成為差值曲線的極小值點(diǎn),而按(20)式或(21)式調(diào)整一次項(xiàng)系數(shù)和二次項(xiàng)系數(shù),則在總體上可獲得更好的一階導(dǎo)數(shù)解算結(jié)果。
4) 利用差值定理進(jìn)行下標(biāo)為i的點(diǎn)的離散數(shù)據(jù)一階導(dǎo)數(shù)解算時(shí),在等間隔采樣條件下,可采用下列步驟:
①選取N(N≥5)點(diǎn)擬合區(qū)間,進(jìn)行最小二乘三次多項(xiàng)式擬合,獲得擬合多項(xiàng)式的三次項(xiàng)系數(shù)A3;

③將擬合區(qū)間向后滑動(dòng),用上述方法繼續(xù)計(jì)算,直至完成不包括端點(diǎn)的所有測(cè)量數(shù)據(jù)的一階導(dǎo)數(shù)解算。
5)按4)中方法進(jìn)行一階導(dǎo)數(shù)解算,可不受測(cè)量誤差限的影響,獲得不包括端點(diǎn)在內(nèi)的所有測(cè)量數(shù)據(jù)的一階導(dǎo)數(shù),解算精度只與測(cè)量值、采樣間隔和三次擬合多項(xiàng)式的三次項(xiàng)系數(shù)有關(guān),解算結(jié)果整體上比差值定理算法更準(zhǔn)確,更穩(wěn)定,且可以良好的解算精度獲得端點(diǎn)附近數(shù)據(jù)的一階導(dǎo)數(shù)。
參考文獻(xiàn):
[1]王業(yè)桂,蔡其發(fā),黃思訓(xùn). 一種氣象觀測(cè)數(shù)據(jù)求導(dǎo)的新方法[J]. 物理學(xué)報(bào), 2010, 59(6): 4359-4368
Wang Yegui, Cai Qifa, Huang Sixun. A New Method for Calculating the Derivation of Meteorological Observational Data[J]. Acta Physica Sinica, 2010, 59(6): 4359-4368 (in Chinese)
[2]孫中豪,杜娟,王子龍. 基于白噪聲正交多項(xiàng)式濾波的GPS測(cè)速方法分析[J]. 測(cè)繪地理信息,2013,38(5):21-24
Sun Zhonghao, Du Juan, Wang Zilong. Analysis of GPS Velocimetry Method Based on White Noise Orthogonal Polynomial Filtering[J]. Journal of Geomatics, 2013, 38(5): 21-24 (in Chinese)
[3]呂游. 基于過(guò)程數(shù)據(jù)的建模方法研究及應(yīng)用[D]. 北京: 華北電力大學(xué), 2014
Lü You. The Research and Application of Data-Based Process Modeling Method[D]. Beijing, North China Electric Power University, 2014 (in Chinese)
[4]劉繼軍. 不適定問(wèn)題的正則化方法及應(yīng)用[M]. 北京:科學(xué)出版社,2005
[5]劉也,朱炬波,梁甸農(nóng). 遞推樣條濾波的工程化應(yīng)用研究[J]. 宇航學(xué)報(bào),2010,31(12): 2794-2800
Liu Ye, Zhu Jubo, Liang Diannong. Research of Recursive Spline Filter for Engineering Applications[J]. Journal of Astronautics,2010,31(12):2794-2800 (in Chinese)
[6]袁莉,劉宏偉,保錚. 雷達(dá)高分辨距離像分類器的參數(shù)自適應(yīng)學(xué)習(xí)算法[J]. 電子與信息學(xué)報(bào), 2008,30(1):198-202
Yuan Li, Liu Hongwei, Bao Zheng. Adaptive learning of Classifier Parameters for Radar High Range Resolution Profiles Recognition[J]. Journal of Electronics & Information Technology, 2008,30(1):198-202 (in Chinese)
[7]梁紅. 利用差值定理降低飛行器速度和加速度擬合的截?cái)嗾`差[J]. 飛行器測(cè)控學(xué)報(bào),2005,24(3):51-54
Liang Hong. Using Error Theorem to Reduce the Truncation Error Produced in Calculating the Velocity and Acceleration of Spacecraft[J]. Journal of Spacecraft TT & C Technology, 2005, 24(3): 51-54 (in Chinese)
Applying Difference Theorem to Calculating First Order Derivatives of Discrete Data
Liang Hong
(PLA Unit 91550, Dalian 116023, China)
Abstract:When the Difference Theorem is applied to calculating first order derivatives of discrete data, the measurement error can lead to some of the data having no result. To resolve this problem, application conditions of the Difference Theorem are analyzed, and the inaccuracies about them in some literature are corrected. Through analyzing and deducing the application method, a new algorithm on first order derivatives of discrete data is put forward; it combines the Difference Theorem with least squares algorithm and adjusts item coefficient and binomial coefficient of third-order fit polynomial for extreme point identifying, and the calculation-formula is given on the premise that measurement data are at equal intervals. Verification of the algorithm is made with simulation and measurement; the results indicate that: (1)this new algorithm can calculate effectively first order derivatives of all data of the measurement sequence, exclusive of the endpoints; (2)the measurement error bounds do not affect the results; (3)the calculated precision is better in general than that of the case in which polynomial coefficients are not adjusted. These enable the Difference Theorem to improve significantly calculation precision of the first order derivatives of the points in the interval where the data change abruptly or near the endpoints of measurement sequence.
Keywords:algorithms, calculations, efficiency, errors, functions, Kalman filters, least squares approximations, linear regression, measurements, polynomials, schematic diagrams, statistics; Difference Theorem, differential coefficient, digital filtering, first order derivative, truncation error
中圖分類號(hào):V557; O29
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1000-2758(2016)01-0166-10
作者簡(jiǎn)介:梁紅(1971—),女,91550部隊(duì)高級(jí)工程師,主要從事試驗(yàn)數(shù)據(jù)處理方法研究。
收稿日期:2015-04-18
