基于ARM-STM32的手勢感應無線遙控小車
2016-05-17 11:18:33長江大學電子信息學院潘宗春王小剛
電子世界 2016年8期
長江大學電子信息學院 潘宗春 王小剛 孫 健 石 勝
?
基于ARM-STM32的手勢感應無線遙控小車
長江大學電子信息學院 潘宗春 王小剛 孫 健 石 勝
【摘要】手勢感應無線遙控小車是基于MEMS加速度傳感器的手勢檢測技術,采用手持板傾斜時加速度向量幅值和微分加速度幅值的絕對平均值描述手勢的運動狀態,進而控制小車的執行動作。兼顧算法的準確性和實時性的同時具備防止誤觸發,設計采用多級探測的思想,在檢測時設定閥值。當檢測出手勢姿態變化超過設定的閥值時,處理器才會發出相關指令,使小車執行相關動作。小車與指令發射端通過無線模塊NRF244L01進行通信,控制范圍更廣泛。
【關鍵詞】STM32F4;M4內核;無線收發;傾角檢測
1 引言
無線傳輸已廣泛應用于各個領域,與傳統的有線傳輸相比,無線傳輸無需布線,在安裝,監控節點增加和節點的移動等方面都比較方便[1]。本作品使用無線傳輸系統將手勢通過處理之后生成指令發送給小車,使小車擁有更靈活的執行動作和更廣泛的運動范圍。基于ARM-STM32的手勢感應無線遙控小車采用MEMS加速度傳感器感應使用者的手勢變化來控制小車的運行動作[2],在小車行進的同時通過使用者持板的角度控制小車的轉向角度,保證小車控制的實時性和準確性。
在惡劣狹小等人體不宜進去但肉眼可觀察的區域以及火災、排雷等存在危險的地方[3],基于ARM-STM32的手勢感應無線遙控小車能行動自如,代替人執行任務。
2 系統方案
基于ARM-STM32的手勢感應無線遙控小車主要涉及的模塊有手持端控制板,小車控制板、加速度傳感器模塊、無線信號通訊模塊以及電機驅動模塊。下面為各模塊的選型方案比較
2.1手持端及小車控制板模塊論證
手持端控制板主要用來采集手持板的傾斜角度,通過無線傳輸給小車控制板;小車控制板根據接收到的信號經過處理運算后修正小車的運行姿態,包括小車前進、后退、左轉彎、右轉彎和速度控制等。
選擇STM32F4-DISCOVERY作為手持板硬件平臺,該硬件平臺上集成硬件資源豐富[4],具備集成仿真器,加速度傳感器,MEM話筒,音頻功放芯片等資源,而且加速度計適合本設計使用。
選擇 STM32F103MINI板作為小車控制板控制平臺,MINI板擁有豐富的例程,板上外設齊全,功耗小,價格合適。
2.2加速度傳感器模塊論證
加速度傳感器是判斷小車運行狀態的核心器件,通過對手持板狀態的采集從而來控制小車的運行狀態。常用的加速度傳感器有ADXL345三軸加速度傳感器,使用I2C接口,精度高,數據穩定,需要另外添加模塊。選用STM32F4-DISCOVERY作為硬件平臺時,板上自帶加速度傳感器LIS302DL,使用SPI接口,而且加速度計適合本設計使用。綜合上述,采用STM32F4-DISCOVERY自帶的加速度傳感器。
2.3無線信號通訊模塊論證
無線信號通訊模塊主要實現手持板與小車控制板間的通訊,用來傳輸加速度傳感器采集的手持板狀態。選擇紅外無線通訊模塊作為通訊模塊,紅外收發模塊結構較為簡單,搭載方便,但是紅外通訊范圍小,傳送速度慢,容易被干擾。選擇無線NRF24L01通訊模塊,NRF24L01收發速度快,傳輸距離遠,使用SPI接口,傳輸更穩定。綜合上述,選擇無線NRF24L01通訊模塊。
3 系統硬件設計
3.1加速度傳感器模塊
ST公司的LIS302DL 小型低功耗(低于1mW)MEMS三軸線性加速度計,具有線性的數字輸出[5],包括有傳感元件和能通過I2C/SPI串行接口提供測量加速度的IC接口,滿刻度量程是±2g/±8g,數據輸出速率是100Hz或400Hz,廣泛應用在自由降落檢測,運動檢測,游戲和虛擬現實輸入設備以及震動檢測和補償等。圖1所示為LIS302DL電路圖。
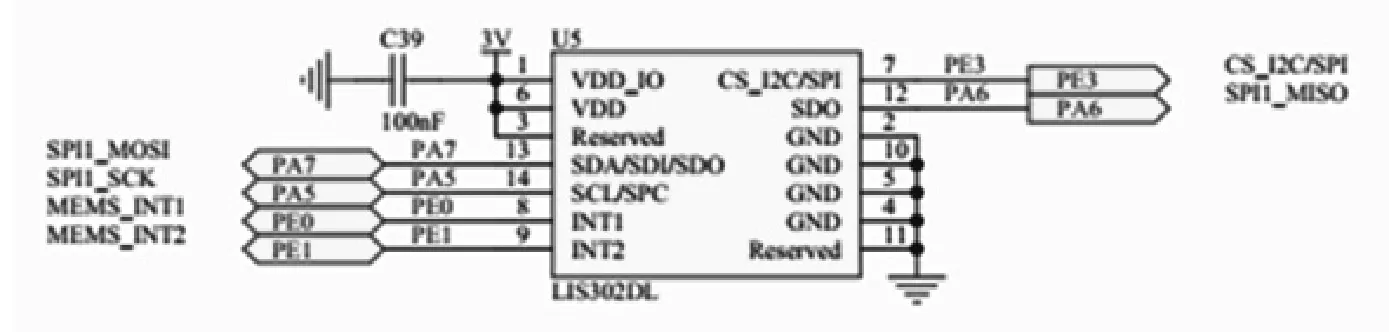
圖1 加速度傳感器
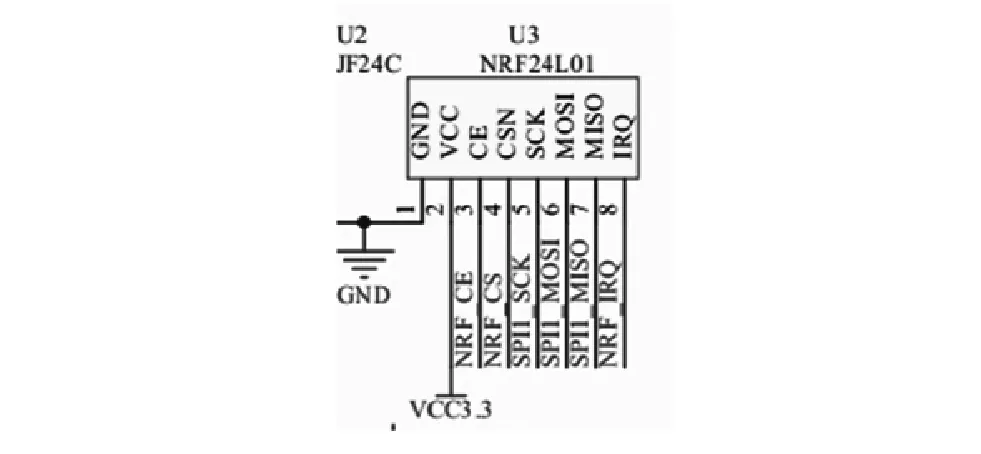
圖2 無線通訊模塊
3.2無線信號通訊模塊
NRF24L01是工作在2.4GHz~2.5GHz的ISM 頻段的單片無線收發器芯片。無線收發器包括:頻率發生器、增強型“SchockBurst”模式控制器、功率放大器、晶體振蕩器、調制器和解調器。輸出功率頻道選擇和協議的設置可以通過SPI 接口進行設置。幾乎可以連接到各種單片機芯片,并完成無線數據傳輸工作。其接線圖如圖2所示。
3.3電機驅動模塊
電機驅動采用飛思卡爾公司5A集成H橋芯片MC33886。MC33886芯片內置了控制邏輯、電荷泵、門驅動電路以及低導通電阻的MOSFET輸出電路,適合用來控制感性直流負載,可以提供連續的5A電流,并且集成了過流保護、過熱保護、欠壓保護。接線圖如圖3所示。
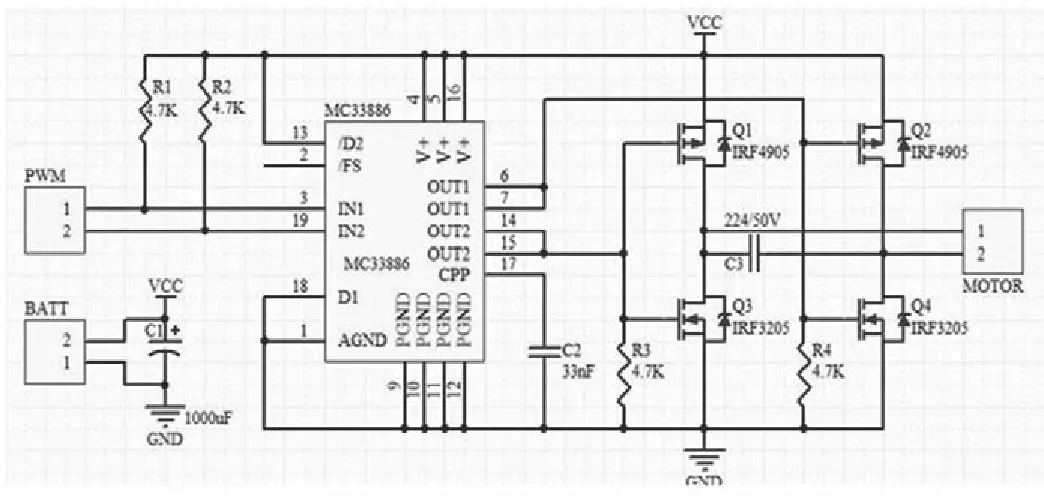
圖3 驅動模塊
4 系統軟件設計
本系統軟件設計分為兩個部分:手持部分、小車部分。手持部分使用STM32F407作為平臺,應用stm32f4-discovery上自帶的加速度傳感器檢測手勢的變化,使用無線模塊NRF24L01作為通訊模塊向小車發送動作指令。手持部分程序流程圖如圖4所示。小車部分接受手持部分的數據進行處理之后驅動小車,具體軟件流程圖如圖5所示:

圖4 手持端軟件流程圖

圖5 小車端軟件流程圖
5 評測與結論
本系統采用加速度計代替傳統的按鍵式遙控器,既可以實現小車的無極轉向,也更加方便、靈活的操作控制小車,使遙控小車更具有可控性,趣味性,以及準確實時性。基于ARM-STM32F4的手勢感應無線遙控小車可以實現根據使用者的持板手勢順利流暢的完成前進、后退、左轉、右轉、急停等動作,完成了預期的方案。下一步可以增加小車的避障、尋跡、圖像采集、圖像的無線傳輸及組網等拓展,實現小車的智能化、多功能化。
參考文獻
[1]譚勇宏,張輝.智能尋跡小車的研究與設計[J].微計算機信息,2008,3-2:310-312.
[2]盛朝強,張瑞成,周志忠.基于微處理器的智能車圖像采集與識別算法研究[J].傳感器與微系統,2011,30(8):22-24.
[3]李國柱.智能車起跑線識別算法及停車策略[J].價值工程,2012(18):166-167.
[4]王紹坤.基于ARMS的無線遙控車系統設計與實現[D].長春:吉林大學,2011.
[5]宋永獻,馬娟麗,賀乃寶,等.基于TMS320F2812的智能循跡小車控制系統設計[J].計算機測量與控制,2011,19(9):2128-2130.
潘宗春(1992—),男,大學本科,主要研究方向:嵌入式技術。
王小剛(1993—),男,大學本科,主要研究方向:檢測技術與自動控制。
孫健(1993—),男,大學本科,主要研究方向:檢測技術與自動控制。
石勝(1993—),男,大學本科,主要研究方向:檢測技術與自動控制。
作者簡介:
基金項目:長江大學大學生創新訓練計劃,批準文號2014014。
