汽車主動安全的防碰撞技術研究現狀
2016-05-17 11:18:31廣東工業大學信息工程學院吳海生吳黎明王桂棠何瑞進
電子世界 2016年8期
關鍵詞:機器視覺
廣東工業大學信息工程學院 吳海生 吳黎明 王桂棠 何瑞進
?
汽車主動安全的防碰撞技術研究現狀
廣東工業大學信息工程學院 吳海生 吳黎明 王桂棠 何瑞進
【摘要】汽車防碰撞技術作為汽車主動安全系統的主要研究方向之一,一直受到研究者們的高度重視。在防碰撞技術研究中,具有視場廣、信息量大、功能多的機器視覺已經代替信息量單一的微波雷達成為研究重點。本文重點介紹在汽車主動防撞技術研究中,基于機器視覺的運動目標檢測算法,并對粒子濾波算法和Mean Shift算法進行對比分析。
【關鍵詞】防碰撞;主動安全;機器視覺;檢測算法
0 引言
據報載,全世界每年因交通事故死亡的人數約130萬,交通事故是“世界第一公害”,這已成為世界范圍內的共識[1][2]。據美國聯邦公路局相關統計數字顯示,在各種交通事故中,因換道操作引起的事故占9%,車道偏離引起的占23%,十字交叉路口搶行的占25%,而追尾碰撞的高達28%[3]。研究數據表明,如果能準確地進行安全預警為駕駛員采取避撞措施避免碰撞贏得足夠的反應時間,可以避免62%追尾碰撞[4]。可見防追尾碰撞技術在汽車主動安全技術研發的重要性。
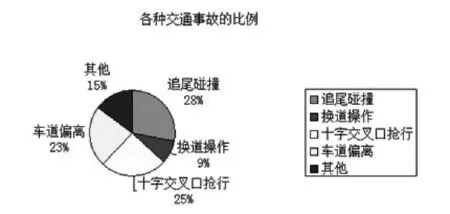
圖1 各種交通事故所占比例
1 測距技術
在汽車防碰撞應用技術研發過程中,車輛間距離的準確判斷是技術實現的基礎。目前在汽車安全系統中應用較多的測距技術有激光、超聲波、微波和機器視覺,這四種測距方式的性能比較如表1所示。
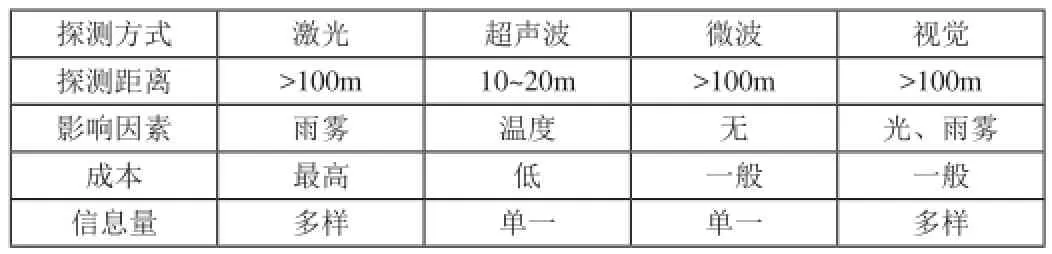
表1 四種測距方式比較
激光雷達在目標探測中可以捕獲目標距離、方位、高度、速度、姿態形狀等重要信息,在GOOGLE等無人汽車中作為核心距離傳感器得到應用[5]。但是激光雷達容易受到粉塵、雨霧等工作環境因素影響,且成本高,目前遠距激光測距儀單價在20萬元以上[6]。
超聲波具備方向性好,穿透力強等特點,且硬件成本低廉。但是超聲波傳遞速度受介質的密度和穩定影響,且傳播速度較慢。因此常用于測量精度不高、量程較短的場景中。
微波又稱毫米波。微波雷達探測距離遠、精度高,同時可以實現多目標跟蹤且不受工作環境因素影響,微波雷達在汽車主動安全方面已得到普遍的應用。但微波雷達獲取的信息量過于單一,難以滿足防碰撞系統對環境信息多樣化的要求。
機器視覺系統是由攝像機將被攝取目標轉換成圖像信號,通過圖像處理系統進行各種算法運算從而提取目標的特征信息。機器視覺對環境信息獲取能力強,即可以實現目標的跟蹤和測量[7],為防追尾碰撞提供技術依據,同時在車道偏離預警[8]、盲區檢測[9]等領域得到廣泛應用。雖然機器視覺系統對工作環境較為敏感,如強光、雨霧天氣等會影響視覺檢測效果;但是由于機器視覺具有視場廣、運行速度快、信息量大、功能多等優點,在汽車主動安全技術研究已得到廣泛應用,是目前主動防碰撞系統研究的主要技術手段之一。
2 防撞模型
預警碰撞模型主要分為安全時間模型和安全距離模型兩類[10]。安全時間模型主要以 TTC(Time to Collision)為研究對象 ,由日本東京農工大學首創,即TTC 模型[11];而安全距離模型主要以車輛之間的實際距離為研究對象,按研究思路不同又可以分為固定車距模型、運動學模型和駕駛員模型等[12]。在這兩種模型的基礎上又相繼提出基于概率、減速度等指標的改進模型。其中基于避免沖突的最大減速度模型DRAC(Deceleration Rate to Avoid Crash)相對實用性更強。
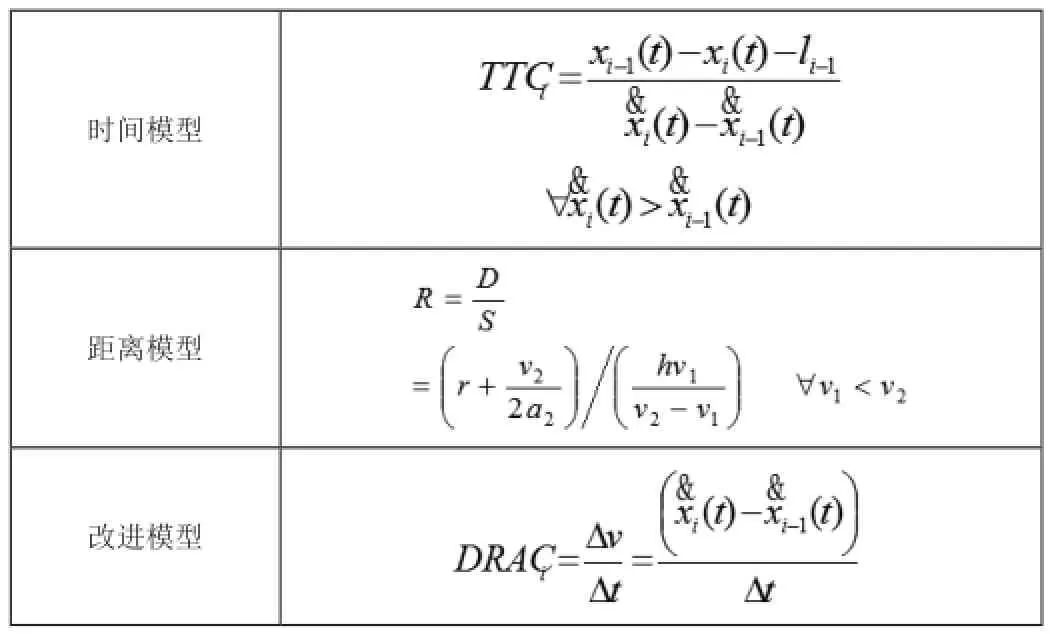
表2 預警碰撞模型
表2中,TTCi是第i輛車的追尾碰撞時間;xi-1(t)是t時刻i-1車的位置;xi(t)是t時刻i車的位置;i-1(t)是t時刻i-1車的速度;i(t)是t時刻i車的速度。在距離模型中,v1、a1和v2、a2前后車的速度和加速度,車間距為h;后車反應時間為r,實際制動距離為D,從產生沖突到發生碰撞的距離記為S,R是制動距離比。DRACi是第i輛車為避免碰撞沖突所采取的減速度;是兩車的運動時間差,即TTC值。
3 運動目標檢測跟蹤算法
在防碰撞研究中,對運動目標的檢測是算法研究的重中之重。對運動目標的經典檢測跟蹤算法有光流法[13]、時域差分法(又稱幀差法)[14]和背景減除法[15]。經典的算法難以解決運動目標檢測中出現的遮擋、陰影等問題,而且魯棒性較差、檢測效率低,難以滿足汽車主動防碰撞系統智能化的檢測需求。目前基于視覺的防撞技術研究中對運動目標的常用檢測算法有:粒子濾波算法[16]和Mean Shift算法[17]。
3.1粒子濾波算法
粒子濾波算法是一種用來對非線性動態系統的目標概率分布進行逼近的新技術,在視覺目標跟蹤研究領域得到廣泛應用。粒子濾波算法具有靈活、易于實現、并行化、應用前景廣闊以及有效處理非線性問題等特點。其基本思想是構造一個基于樣本的后驗概率密度函數。假設動態系統狀態空間模型如下所示:
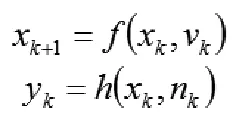
其中,函數f(x,v)、h(x,n)可以是線性也可以是非線性的;x為系統狀態變量,y為系統測量變量,v、n分別代表系統噪聲和測量噪聲。
假設系統狀態x服從一階馬爾可夫過程,系統狀態x與量測變量y相互獨立,初始狀態x0的先驗分布為p(x0)。從p(x0:k/y0:k)中抽取N 個獨立同分布的樣本{xi0:k;i =1,…,N},狀態的后驗概率密度(Posteriori probability density)可以用經驗分布逼近為:
式中δ(g)表示狄拉克函數。
在實際應用中,后驗概率密度常常是多變量、非標準概率,因此需要基于先驗條件描述目標狀態對應的加權值ω,再利用加權和的形式描述目標狀態的后驗概率密度,如式:
式中,加權值ωk(x0:k)稱為重要性權值。
重要性分布函數為:

選取重要性函數的準則是使重要性權值的方差最小。
粒子濾波算法的一個主要問題是退化問題,即經過幾步迭代以后,除了極少數粒子外,其他的粒子權值小到可以忽略不計的程度。針對粒子濾波的退化現象,主要的解決方法有兩種。一是選擇好的重要密度函數;二是使用重采樣技術。通過重采樣去除權值較小的粒子并復制權值較大的粒子。粒子濾波跟蹤算法具有較強的穩定性、魯棒性以及抗遮擋能力。但是粒子濾波跟蹤算法采樣依舊是基于全局搜索采樣,其算法效率有待提升。
3.2Mean Shift算法
Mean Shift即均值漂移,其概率密度分布最大的方向即漂移的方向。Mean Shift算法是利用核密度估計方法,對給定d維空間Rd中n個樣本點集S=﹛xi,i=1,…,n﹜,利用核函數k(x)和函數窗寬h,在x點處的進行概率密度估計,為確定漂移方向提供基礎。基于核函數的無參數密度估計如式:
核函數直方圖:

目標密度函數:
其中,b(xi):R→{1,…,m}是將坐標為xi的像素的量化值,m是直方圖階數;u是直方圖索引。相似度函數:
式中加權因子wi為:
Mean Shift目標跟蹤算法的運行步驟如下。
Step1:初始化y0的目標密度函數pu(y1);
Step2:計算加權因子wi,并根據迭代公式更新位置y1;
Step3:根據更新的位置信息計算其目標密度函數pu(y1)及相似度ρ(y1)。如果有ρ(y1)< ρ(y0),則y1=(y0+y1)/2重新計算相似度ρ(y1);如果‖y0+y1‖<ε,則停止;否則y0=y1,回到step2。
Mean Shift目標跟蹤算法避免了全局搜索,極大提升了算法運行效率。在實際應用中快速的模式匹配能更好滿足對目標跟蹤實時性的要求。除此之外,采用核函數顏色直方圖對目標進行建模,對目標一定程度的形變干擾不敏感,識別準確度高。由于Mean算法基于密度估計進行局部有效的搜索,但是也造成Mean Shift算法對處理目標遮擋等問題能力不強。
3.3算法研究趨勢
無論粒子濾波還是均值漂移算法,都針對運動目標檢測跟蹤具體出現的問題提出有效的解決方法,同時也暴露了單個算法本身的缺陷,難以兼顧檢測準確性及效率。對于實用性要求較高的防碰撞技術研究過程中,更多精力集中在多算法融合,提升算法整體檢測的準確性和檢測效率。董慧芬等人提出基于自適應卡爾曼濾波與Mean Shift算法相結合,很好解決了背景圖像陰影和遮擋對目標跟蹤造成的干擾問題[18];廖逸琪則基于目標特征檢測融合蟻群算法實現對運動目標的軌跡跟蹤[19];張廣秀則基于小波變換實現汽車前向防撞技術研究[20]。
4 總結
汽車主動防碰撞技術研究從開始的車與車之間的防碰撞擴展到后來車與人的防撞,甚至要求具備一定程度的路線規劃及決策能力,其探測手段也從原來微波雷達轉向檢測能力更強的視覺技術。而在算法研究上,更加趨向多算法融合。深度學習作為機器學習領域一個新的研究方向,也逐漸在汽車防碰撞技術研究中得到推廣應用。
參考文獻
[1]劉志強,趙艷萍,汪澎.道路交通安全工程[M].北京:高等教育出版社,2012.
[2]涂孝軍.面向駕駛員輔助系統的換道意圖辨識方法研究[D].江蘇大學,2015.
[3]王家恩.基于視覺的駕駛員橫向輔助系統關鍵技術研究[D].合肥工業大學,2013.
[4]戴榮軍,周俊,王海清.新型主動防撞安全預警距離模型[J].農業裝備與車輛工程,2014(8):42-47.
[5]無人駕駛汽車的“眼睛”,變得更加銳利了[J].電子世界,2015(18).
[6]無人駕駛汽車“眼睛”LIDAR成本降低[EB/OL].http://news. zol.com.cn/538/5388238.html,2015-09-08.
[7]劉銘.基于ORB算法的雙目視覺測量與跟蹤研究[D].哈爾濱工業大學,2014.
[8]許倫輝,羅強,夏新海,胡三根.車道偏離預警系統中偏離時間的估算方法[J].華南理工大學學報,2014,42(3):59-65.
[9]楊思思.基于單目視覺的車輛盲區預警系統的研究及實現[D].浙江大學,2015.
[10]王建強,遲瑞娟,張磊等.適應駕駛員特性的汽車追尾報警-避撞算法研究[J].公路交通科技,2009,26(1):7-12.
[11]Yoshida H,Awano S,Nagai M,et al.Target following brake control for collision avoidance assist of active interface vehicle[C].2006 International Joint Conference,IEEE,2006:4436-4439.
[12]于廣鵬,譚德榮,馬福霞.汽車防碰撞預警/碰撞算法研究現狀及分析[J].山東理工大學學報,2014,28(6):1-5.
[13]袁國武,陳志強,龔健等.一種結合光流法與三幀差分法的運動目標檢測算法[J].小型微型計算機系統,2013,3(3):668-671.
[14]陳春雨,姚秋香,喬玉龍.基于幀差法和邊緣檢測法的視頻分割算法[J].濟南大學學報,2012,26(1):31-36.
[15]王小平,張麗杰,常佶.基于單高斯背景模型運動目標檢測方法的改進[J].計算機工程與應用,2009,45(21):118-120.
[16]陳丁.基于視覺的汽車列車行駛軌跡測量系統[D].東南大學,2014.
[17]劉晴,唐林波,趙保軍,孫景樂.改進的Mean Shift目標跟蹤算法[J].系統工程與電子技術,2013,35(6):1318-1323.
[18]董慧芬,董保磊,丁小芳,張振.基于相關區域分層的改進Mean Shift目標跟蹤算法[J].計算機應用,2014,34(S2):286-290.
[19]廖逸琪.多攝像機下多目標跟蹤相關技術研究[D].南京理工大學,2015.
[20]張廣秀.基于視覺的汽車前向防碰撞技術研究[D].河北工業大學,2008.
吳海生(1989—),男,碩士,主要研究方向:嵌入式系統、圖像處理。
吳黎明(1962—),男,碩士生導師,教授,主要研究方向:光機電一體化,嵌入式系統、測控技術。
王桂棠(1964—),男,碩士生導師,教授,主要研究方向:嵌入式、機器視覺、物聯網等科學技術在智能制造中的應用研究和開發。
何瑞進(1990—),男,碩士,主要研究方向:嵌入式系統,通信與信息系統。
作者簡介:
基金項目:廣州市科技計劃項目(201300000002);廣東省省級科技計劃項目(2015A030401088)。
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
