電動汽車轉矩分配與橫擺力矩控制研究
2016-05-18 08:18:26曹兢哲李中豪
汽車實用技術 2016年7期
曹兢哲,李中豪
(長安大學汽車學院,陜西 西安 710064)
新能源汽車
電動汽車轉矩分配與橫擺力矩控制研究
曹兢哲,李中豪
(長安大學汽車學院,陜西 西安 710064)
由于在結構布置、動力性等方面的突出優勢,采用輪轂電機驅動已經成為未來汽車的重要發展方向。在文章中,對采用輪轂電機驅動的汽車進行了深入分析,建立整車動力學模型,進行了輪胎驅動力分配、橫擺力矩控制的仿真研究。結果表明,輪轂電機可以大幅度提高車輛的動力性及操縱穩定性。
電動汽車;輪轂電機;轉矩分配;橫擺力矩控制
CLC NO.:U463.3 Document Code: A Article ID: 1671-7988 (2016)07-11-03
引言
由輪轂電機驅動的電動汽車是一種新型的電動汽車驅動方式。由于這種驅動結構相對簡單,且使得各車輪驅動力可靈活分配,大幅度提高車輛動力學,所以其已經成為未來電動汽車的發展方向。在電動汽車中,電機控制是整車控制的重點部分,而電機轉矩分配控制又是電機控制的這一重點之中的難點。
1、轉矩分配控制
電動汽車既可以前輪驅動,亦可以后輪驅動或者四輪驅動,驅動力控制可由電機獨立控制,具有快速的轉矩響應,從而使電動汽車的驅動控制更加靈活,而且可以提高汽車的操縱穩定性。所以研究電動汽車的轉矩分配控制就變得迫在眉睫。
如果可以合理控制每一個電機的驅動力矩或者制動力矩,就可以實現傳統內燃機汽車上所有的底盤控制系統,比如ABS、TCS、ESP等系統的功能,而且能夠實現制動能量回收,充分利用制動能量,減少消耗。電動輪汽車技術研究的難點在于電子差速和轉矩分配,而且電動輪汽車的整車控制設計的核心主要就是這兩點,尤其是轉矩分配。所以對轉矩分配的控制策略研究是本文的重點。
首先,車輛行駛過程中,由于各輪胎與地面間的接觸情況不盡相同,且車輪間存在復雜的載荷轉移現象,使得各輪胎的附著能力差別很大。而輪轂電機電動汽車可對各車輪的驅動力矩獨立控制,由此便實現了根據各輪胎的附著能力進行驅動轉矩分配的控制。其中,較常用的一種方法為基于附著裕度進行各車輪間的驅動轉矩分配。電動輪汽車的結構簡單,可以利用其結構優勢,直接通過控制驅動電機讓其產生反向的制動轉矩,或者減小特定的電動輪驅動轉矩,從而產生橫擺力矩達到傳統ESP的功能。
2、整車動力學模型搭建

圖1 整車非線性動力學模型
為對整車電機驅動轉矩控制策略進行研究與分析,首先建立某阿克曼轉向輪轂電機電動汽車整車7自由度動力學模型。模型建立時,假設:
車輛質心位于左右對稱面上;忽略越野工況,則不考慮車輛的俯仰、側傾、垂向運動和車輪的垂向運動;假設轉向時,兩前輪轉角相同。
利用牛頓第二定律,對車輛的縱向自由度、側向自由度、橫擺自由度和四個車輪的旋轉自由度列動力學方程為:

其中,m為整車質量;Iz為懸掛質量繞z軸的轉動慣量,Je為車輪轉動慣量,ωij為車輪旋轉角速度,Ti為車輪h驅動力矩(制動時為負值),Fzij為地面法向反作用力,f滾動阻力系數,Re為車輪半徑。
3、基于最優附著裕度的轉矩分配
3.1 控制目標
本文將以最優附著裕度為控制目標進行電機驅動轉矩分配。此種控制方法的控制目標函數為:

其中:Fxi, Fyi, Fzi分別為各車輪的縱向力、側偏力和垂直載荷。輪胎的側向力采用HSRI輪胎模型的表示方式:

其中:各參數分別為各輪胎的滑移率,側偏角,靜態縱向剛度和側向剛度。此種控制方法的優化目標即為使P最小,此時便可充分利用輪胎與地面間的附著能力。
3.2 仿真分析
以前文的整車動力學模型為基礎,對最優附著裕度驅動力矩分配控制策略進行驗證,驗證方式為,利用虛擬樣機仿真手段,仿真結果如圖:

圖2 最優附著裕度分配控制策略仿真結果
由上圖可知,在最優分配策略作用下,車輛的車速先達到最大速度。在驅動過程中,各輪胎的垂直載、滑移率等出現了明顯的差距,則此時各輪胎的附著裕度相差較大,而平均分配策略下車輛各驅動電機輸出轉矩相同,明顯不適于當前工況。但最優分配策略下,各驅動電機輸出轉矩有明顯的差異,此時,各驅動電機根據具體工況輸出了符合其附著能力情況的驅動力矩,增強了車輛的動力性。
3.3 車輛橫擺力矩控制分配
輪轂電機電動汽車可以通過控制電機轉矩,輕松的實現對直接橫擺力矩的控制。輪轂電機的驅動轉矩可以快速、精確、獨立的響應。所以電機驅動直接橫擺力矩控制相對于主動制動橫擺力矩控制更加直接和容易實現。因此綜合的制動轉矩分配控制策略應該是:根據車輛的狀態通過控制車輛縱向的驅動力矩或者制動力矩來達到控制車身的橫擺力矩的效果。
本文,以提高低速轉向的動力性和高速轉向的穩定性為目的,制定了如下圖所示控制策略。

圖3 動力學轉向參考模型橫擺MAP圖
在0-30km/h的低速區間內,ESP系統不參與工作,以保證低速區間的直駛動力性。在30-60km/h的中速區間內,ESP系統開始參與工作,這段區間的目標是提高機動性、但又不與原車輛相差太多,設計其中性轉向倍數為 0.85-1倍,之所以從1倍開始降低,也是因為需要保證車輛在進入30km/h以上區間內,ESP系統不會突然將車輛操縱特性改變太多,隨著車速增加,倍數逐漸降低,換言之車輛的不足轉向特性逐漸增強,這與一般車輛的操縱感受相同。在60-100km/h的高速區間內,ESP系統的目標是降低機動性、提高穩定性并與原車輛操縱性能感受不至相差過多,此時倍數斜率有所降低,換言之,在原來的基礎上增大不足轉向特性,也就是增強車輛的穩定性。
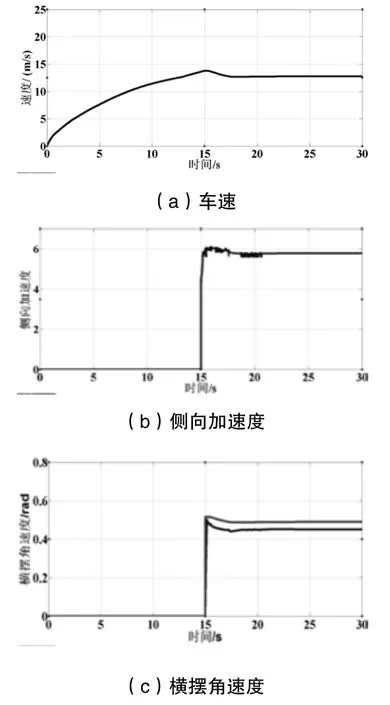
圖4 橫擺力矩控制仿真結果
同樣基于上文中的整車動力學模型對ESP控制策略進行仿真分析,結果如圖4。
圖5中給出了12°前輪轉角15秒階躍輸入并付諸ESP系統作動時車輛的操縱穩定性表現,車輛此時仍處于中高速度段,但側向加速度已經高達0.6g,ESP系統控制目標仍然是提高車輛機動性。圖中反應了理想橫擺角速度和實際橫擺角速度的對比,車輛不足轉向特性被明顯削弱,隨著穩態時間的不斷推進,車輛的橫擺角速度響應并沒有增大或減小,換言之,車輛嚴格表現出了與中性轉向呈某種倍數關系的“假中性轉向”,這一點,是我們希望看到的。但是也出現了明顯不足,車輛的橫擺角速度并沒有與理想橫擺角速度嚴格重合,分析認為:這是因為車輛此時的側向加速度明顯達到了較大值,基本處于車輛轉向極限邊緣,故而對車輛操縱特性的控制已處于相對“吃力”階段。
4、結論
近年來,輪轂電機電動汽車由于其傳動鏈短、機械結構簡單、驅動輪控制靈活性高等特點,得到了大力發展。在電動汽車中,電機控制是整車控制的重點部分,而電機轉矩分配控制又是電機控制的這一重點之中的難點。所以主要針對這一重點做了如下研究:
(1)針對電機驅動力矩控制策略,簡單對比了平均分配控制策略和最優附著裕度控制策略下車輛的動力學性能表現。結果證明,最優附著裕度控制策略下,各驅動電機能根據各車輪的工況驅動車輛,充分利用輪胎與地面間的附著能力,車輛動力性能得到明顯提高。
(2)對輪轂電機橫擺力矩控制策略進行研究。基于提高中、低速轉向機動性和高速轉向穩定性的目的,設計了ESP控制系統,且仿真結果表明,該控制策略效果良好。
[1] 陳清泉,孫逢春,祝嘉光.現代電動汽車技術[M].北京理工大學出版社.
[2] 余卓平,熊璐.分布式驅動車輛動力學控制系統發展現狀[J],機械工程學報.2013.
[3] 邊耀璋.汽車新能源技術[M].人民交通出版, 2003.
[4] Manfred Mischke.汽車動力學[M].北京: 清華大學出版社, 2009.
Research on torque distribution and yaw moment control of electric vehicle
Cao Jingzhe, Li Zhonghao
( Automobile School of Chang'an University, Shaanxi Xi'an 710064 )
Due to the outstanding advantages in structural arrangement, power and other aspects of the use of in-wheel motor drive has become an important future direction of the car. In this paper, on the use of in-wheel motor drive auto-depth analysis, vehicle dynamics model, the tire driving force distribution, simulation of the yaw moment control. The results show that the in-wheel motor can significantly improve the power performance and handling stability of the vehicle.
electric vehicle; hub motor; Torque distribution; Yaw moment control
U463.3
A
1671-7988(2016)07-11-03
曹兢哲,就讀于長安大學。
10.16638/j.cnki.1671-7988.2016.07.004
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
