基于ADVISOR的純電動汽車動力系統匹配
2016-05-18 08:18:31楊維健常志超
汽車實用技術 2016年7期
關鍵詞:汽車
楊維健,常志超
(長安大學汽車學院,陜西 西安 710054)
基于ADVISOR的純電動汽車動力系統匹配
楊維健,常志超
(長安大學汽車學院,陜西 西安 710054)
發展純電動汽車已經成為當今汽車行業的主流,在電動汽車核心技術中動力系統的參數匹配是其中之一,合理的參數匹配對汽車的動力性與續駛里程都有很大的影響。文章首先列出了純電動汽車整車參數和性能指標,根據汽車受力分析,初步計算各部件的基本參數。然后,利用ADVISOR 仿真軟件,仿真了動力性和經濟性,為以后其他車型的匹配研究提供依據。
純電動汽車;動力性;經濟性;匹配;仿真
CLC NO.:U469.7 Document Code: A Article ID: 1671-7988 (2016)07-32-03
前言
能源與環境問題成為困擾傳統汽車發展的瓶頸,因而發展純電動汽車已經成為當今汽車行業的主流。然而,純電動汽車面臨一系列的問題沒有解決。其中,電池容量和電機性能成為困擾電動汽車走進千家萬戶的重要因素。在短時間內無法有效提高電池容量、新能源電機技術不成熟的前提下,合理利用現有條件,對純電動汽車動力系統參數進行合理匹配變得越來越重要。
1、 某型純電動汽車的整車參數和性能指標
2、動力匹配的計算過程
2.1 汽車受力分析
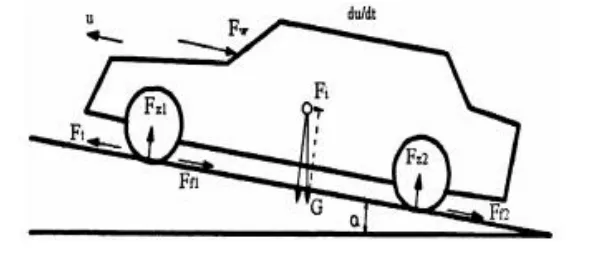
圖1 汽車加速上坡時的受力圖
雖然純電動汽車與傳統汽車有著很大的區別特別是在驅動方式上,但是它們在行駛過程中的受力情況是一樣的。
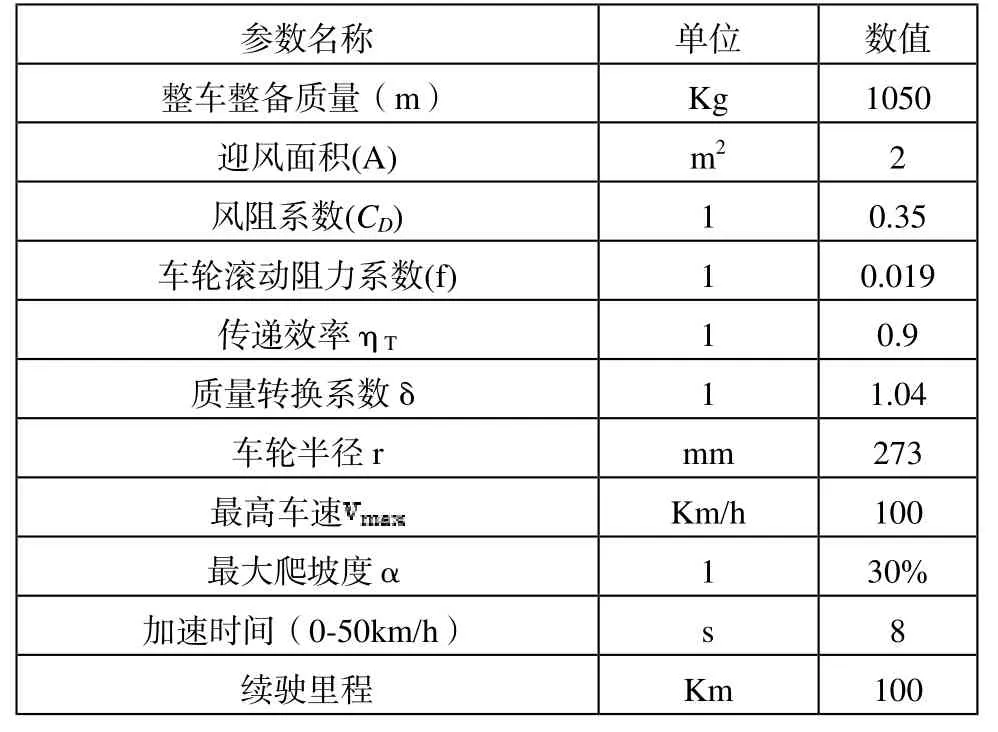
表1 整車參數和性能指標
汽車的行駛方程式是:
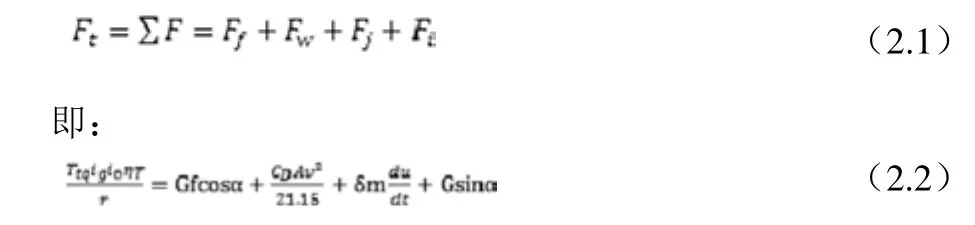
上式中,Ft為驅動力;ΣF為各種阻力之和;r為輪胎半徑;ηT表示動力系統的效率;Ttq表示電動機轉矩;ig表示變速器的傳動比;io主減速器的傳動比;Ff為滾動阻力;Fi的為坡度阻力;Fw為空氣阻力;Fj為加速阻力。
2.2 動力性能分析
2.2.1 最高車速分析
汽車在水平良好路面上的以最高車速行駛時,只考慮空氣阻力和滾動阻力,可得:

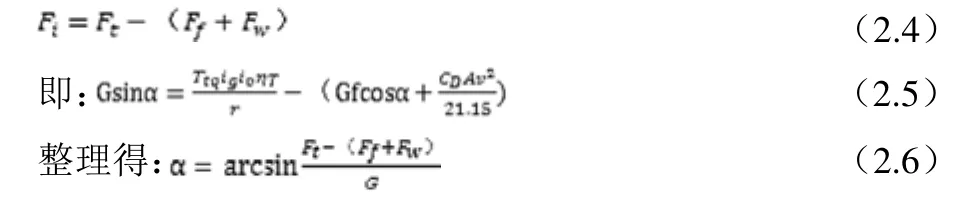
2.2.2 爬坡能力分析
爬坡時車速較低,忽略空氣阻力和加速阻力。因此其坡度阻力為:
2.2.3 加速性能分析

2.3 經濟性能分析
純電動汽車以一定速度,在水平路面等速行駛時所消耗的能量和等速行駛工況下的續航里程為:

式中,η表示電機以及控制器的傳動效率;W表示電池總能量。
聯立式(2.10)和(2.11)可得等速時續航里程公式為:

3、驅動電機參數設計
3.1 驅動電動機功率的選擇
①根據最高車速確定電動機功率:
式中,x為擬合系數,一般約為0.5;tm為起步加速過程的時間(s),vm為末車速。
假設整車在平坦路面加速,根據整車加速過程動力學方程,其瞬態過程總功率為:

電動汽車的電動機功率應同時滿足最高行駛車速、爬坡度和加速性能的要求,所以電動汽車的電動機峰值功率Pm為:
式中,λ為電動機的過載系數,一般取2~3。
3.2 電動機轉速的選擇
電動機額定轉速ne的計算式為:

在式中,ne表示電動機的額定轉速(r/min),nmax表示電動機的最大轉速(r/min),通常一般取2~β~4[5]。
3.3 電動機轉矩的選擇
根據轉速轉矩和功率之間的關系,可得額定轉矩Te:

4、驅動系統傳動比的選擇
(1)最小傳動比的確定:

(2)最大傳動比的確定(忽略空氣阻力和加速阻力):

最大傳動比確定以后,還應計算驅動輪的附著率,檢查附著條件是否滿足要求:

式中,φ為附著系數,一般可取0.5~0.6。
5、動力電池的參數設計
(1)根據最大功率選擇電池組數目:

Pbamx為單個電池的最大輸出功率,ηe為電機的效率,ηec為電機控制器的效率。
(2)根據續駛里程選擇電池組的數目:

式中L為續駛里程(km),W為汽車行駛1km所消耗的能量(kw),Vs為單個電池的電壓(V),Cs為單位電池的容量(Ah)。
由上述兩種方法確定的電動汽車電池組數目為:

6、匹配結果

表2 純電動汽車動力系統匹配結果
7、仿真軟件ADVISOR的應用
隨著仿真理論發展和計算機技術的應用,利用仿真軟件對純電動汽車的整體性能進行模擬,逐漸成為一種重要的研究方法。仿真技術的應用,很大程度上改善了電動汽車的性能,縮短了研發周期,提高了工作效率。
本文選用CYC_ECE_EUDC作為循環工況。如圖2為該循環工況的數據關系曲線:
圖2 CYC_ECE_EUDC道路循環工況
該循環工況是有兩部分構成的。前800s分成四個相同的小部分,每一個小部分包括15種行駛方式,所以又稱“十五工況法”, 共進行4個十五工況。測試時間持續780s,總行駛里程為4.052km,平均車速18.7km/h。第二部分為一個附加的市郊行駛工況(EUDC),代表市郊車輛運行過程,測試時間為400s,行駛里程6.955km,平均車速62.6 km/h,該部分最高速度為120km/h。
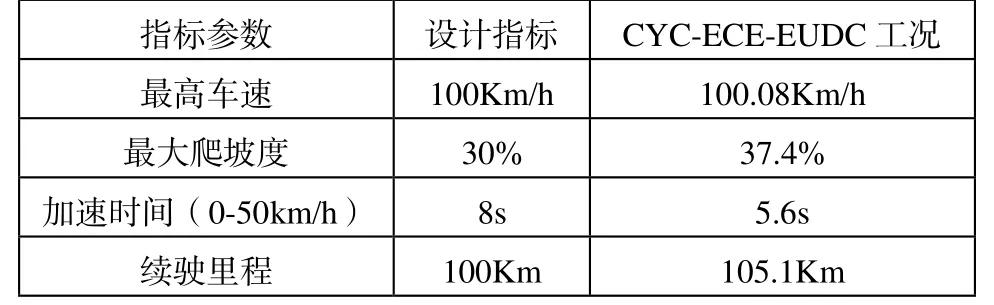
表3 ADVISOR仿真結果與對比
從表3中仿真結果以及設計指標的比較可以看出:汽車的最大行駛速度接近設計指標,說明了減速器速比或者電機功率比較合理;仿真結果所顯示的0~50(km/h)的加速性能和爬坡度優于設計的指標,這就體現了驅動機的低速扭矩特性良好;該工況下的續駛里程稍微大于設計指標,說明蓄電池能量正好。
[1] 謝明潔.電動汽車發展現狀及前景[J].中國科技信息,2013(22): P120-P122.
[2] 陳清泉,孫逢春,祝嘉光.現代電動汽車技術[M].北京:北京理工大學出版社,2004.
[3] 余志生.汽車理論(第四版)[M].北京:機械工業出版社,2006.
[4] 徐國凱,張秀春.電動汽車的驅動與控制[M].北京:電子工業出版社,2010.6.
[5] 李曉林.電動汽車整車控制系統介紹[J].科技資訊,2012(19): P27-P29.
[6] 包建超.基于ADVISOR仿真的純電動汽車動力系統匹配研究[D].西安:長安大學,2014.
Pure electric automobile power transmission parameter match and study based on ADVISOR
Yang Weijian, Chang Zhichao
( School of automobile, Chang’ an university, Shaanxi Xi’an 710054 )
Nowadays, the development of pure electric vehicles has become the mainstream of automotive industry. The optimal matching of dynamic transmission device parameters is one of the key techniques and optimal matching has a great influence on dynamic performance and driving rang. Firstly, the parameters and performance indexes of the pure electric vehicle are listed in this paper. According to the force analysis of the vehicle,the basic parameters of each device are calculated. Then, using the ADVISOR, the dynamic performance and driving rang are simulated.As a model, it provides a basis for the matching of other models in the future.
pure electric vehicles; dynamic; driving rang; matching; simulation
U469.7
A
1671-7988(2016)07-32-03
楊維健,就讀于長安大學。
10.16638/j.cnki.1671-7988.2016.07.010
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
