基于水聲傳播時延補償的慣導誤差修正方法
2016-05-18 09:23:28陳建華郭正東欒祿雨海軍潛艇學院山東青島266042
艦船科學技術 2016年3期
陳建華,朱 海,郭正東,欒祿雨(海軍潛艇學院,山東 青島 266042)
?
基于水聲傳播時延補償的慣導誤差修正方法
陳建華,朱海,郭正東,欒祿雨
(海軍潛艇學院,山東青島 266042)
摘要:針對潛器慣導定位誤差修正問題,提出慣導/多信標水聲測距組合導航實現方法,并主要針對由于潛器運動與水聲傳播時間延遲導致的誤差進行分析,提出一種基于水聲傳播時延補償的水下慣導定位誤差修正方法,該方法利用擴展卡爾曼濾波,通過對慣導系統位置誤差狀態的前推,重構量測方程,實現量測方程與系統量測量時間的一致性,補償時間延遲產生的誤差。仿真結果表明,該方法可有效提高慣導/多信標水聲測距組合導航系統對慣導定位誤差修正的精度。
關鍵詞:慣導;定位誤差;EKF;水聲傳播時間延遲
0 引 言
目前,長航時潛器水下自主導航主要依靠推算導航與慣性導航[1],但2種導航方式都存在定位誤差隨時間積累的缺點,當前水下隱蔽定位修正比較實用的是水聲定位方法,因此,國內外在水聲定位系統輔助潛器定位方面進行了大量研究,如文獻[2]將測距聲信標與載體低成本導航傳感器的導航數據相融合,提出基于 EKF 的導航數據融合算法,解決復雜環境下的深水機器人位置估計問題。文獻[3-4]研究了基于移動長基線的 AUV 協同導航算法。文獻[5-6]研究了只依靠航跡推算和潛器之間相對測距的情況下,潛器的相對定位問題。文獻[7–8]則針對移動長基線 AUV 協同導航中的水聲傳播延遲誤差進行分析,并給出補償方法。然而這些研究的前提都是 AUV 上不裝備慣導系統,只裝備簡單的導航設備,系統模型則為 AUV 運動學模型。而隨著大型遠程 AUV 的發展,以及其他潛器慣導系統水下校正的需求日益迫切,針對慣導/水聲測距組合導航的研究具有重要意義。本文以慣導系統誤差模型為基礎,提出慣導/多信標測距組合導航實現方法,用于潛器慣導定位誤差修正,并主要針對由于潛器運動及水聲傳播時間延遲導致的誤差進行分析及補償方法研究。
1 時間延遲誤差分析
由于水聲信號在水中傳播速度較慢(1500 m/s),而潛器處于運動狀態,因此必須考慮時間延遲導致的誤差。如圖1 所示,潛器發送 Ping 詢問信號后收到信標的應答信號需要一定的時間。同時,由于潛器與各信標之間的距離不等,潛器收到每個信標應答信號的時刻也不相同,加上潛器的自身運動,因而潛器在不同位置不同時刻收到信標應答信號。文獻[7]對此進行分析,但存在問題,下面給出詳細分析。
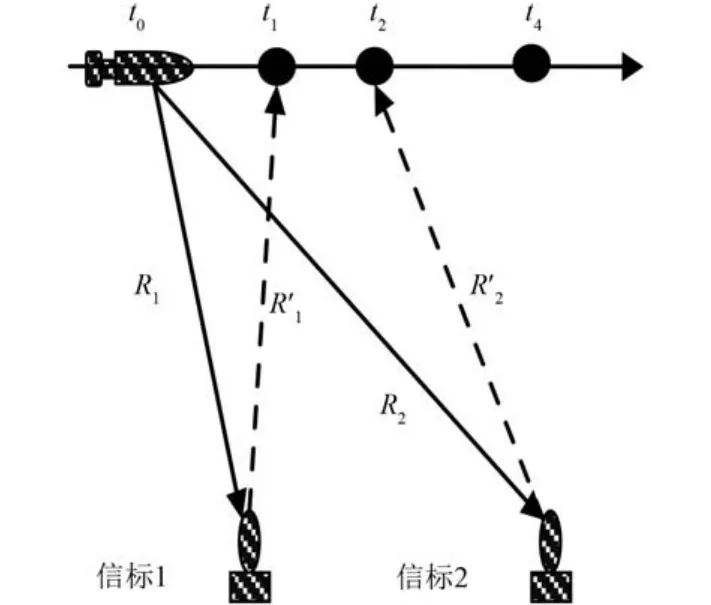
圖1 時間延遲誤差示意圖Fig. 1 Schematic diagram of the time-delay error
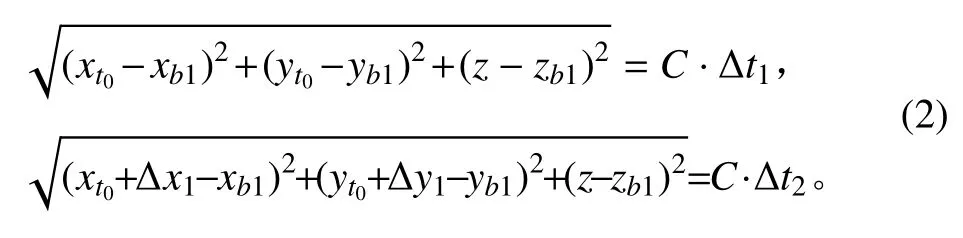
通常長基線定位系統布放 4 個信標,如圖2 所示。若不考慮時間延遲,根據長基線定位原理,可得潛器與信標 1 之間的定位方程如下[9]:

其中(x, y, z)為潛器在陣位坐標系下的位置坐標。此處,陣位坐標系原點設在信標 1 所在位置,坐標軸指向與東北天地理坐標系相同。
在陣位坐標系下,潛器從 t0時刻發出 Ping 到應答器收到應答信號用時為,其中詢問信號傳播時間,應答信號傳播時間,其間潛器定深航行位移為 ΔS1= (Δx1,Δy1) 。考慮到慣導具有較高的短時相對精度,該位移可由慣導輸出速度進行推算。從而可得方程
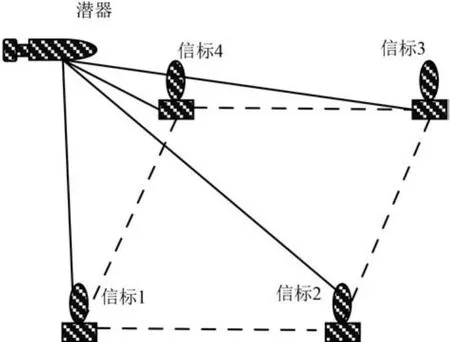
圖2 長基線定位系統Fig. 2 The LBL positioning system
上式兩邊平方并相加

整理為
對于等式右邊,令Δt1≈Δt2=ΔT1,則有
值得指出的是,上述推導過程中的聲速 C 為水聲系統利用水聲傳播特性相關理論進行修正過的聲速,即 R1為水聲系統輸出的距離量測值。

2 考慮水聲傳播時間延遲的慣導定位誤差修正算法
2.1系統方程
在本系統中,深度 z 可由深度傳感器直接獲取,故誤差模型中不考慮 z 方向速度誤差及深度 z 的誤差。
選取狀態變量X=[αβγδVXδVYδLδλ]T,可根據捷聯慣導系統誤差模型寫出系統方程

系統矩陣F及w的具體形式見文獻[10]。
2.2重構量測方程
由前述推導,可得量測方程(以信標 1 為例)
為補償時間延遲造成的誤差,重構量測方程。
潛器在 t0時刻的位置狀態可由 t4時刻位置向前推求得

其中,(Δx4, Δy4)為潛器從 t0時刻到 t4時刻的航行位移,(xk,yk)是 t4時刻真實位置。

代入上式有

以 R 為量測量,可得 EKF 的量測方程,
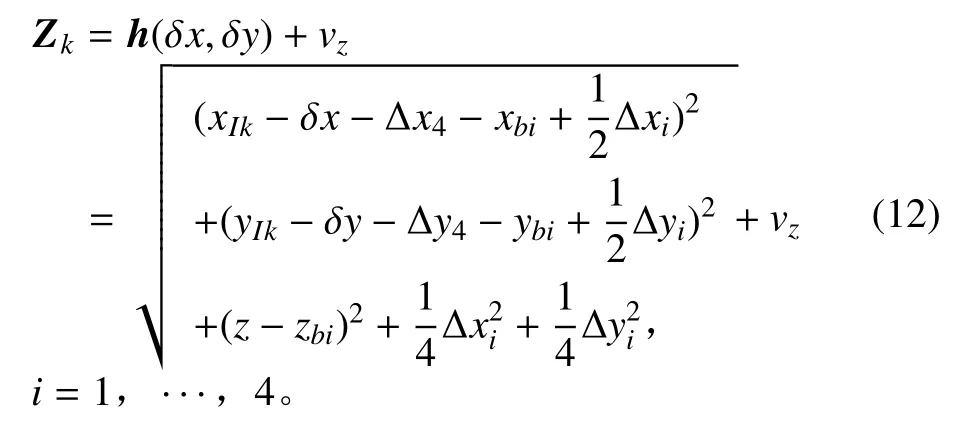
式中:vz為量測噪聲,設為獨立且不相關的零均值高斯白噪聲,其方差為
量測方程的雅克比矩陣為
其中,
可得系統量測矩陣為

3 仿真分析
為驗證算法的有效性,進行仿真試驗。在仿真試驗中,在水下 500 m 深度布放 4 個浮標,組成 4 000 m × 2 000 m 的長方形基陣。潛器直線航行,速度 2 m/s,航向 90°,深度 50 m。潛器 SINS 數據更新周期為 1 s。其中慣性元件參數如表 1 所示。
在進入信標作用范圍之前, SINS 導航誤差為:緯度誤差–200 m,經度誤差 200 m,失準角為(2′, 2′, 1′)。信標 1 位置為 L = 30°, λ = 120°。潛器開始發射第1個Ping 信號的位置在陣位坐標系中表示為(–2 000 m, 1 000 m),潛器每隔 10 s 向外發送一次 Ping 詢問信號,完全收到各信標的應答信號后進行慣導定位誤差解算。修正過程持續 500 s。位置誤差曲線如圖3 所示。
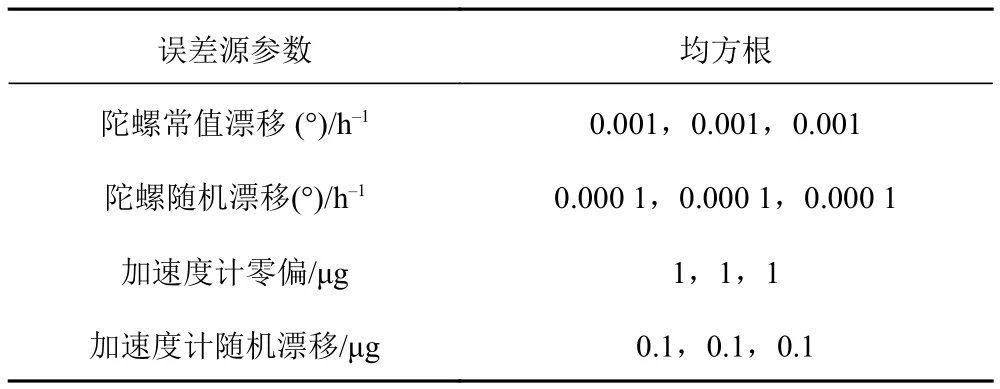
表1 SINS誤差源參數Tab. 1 SINS error source parameters
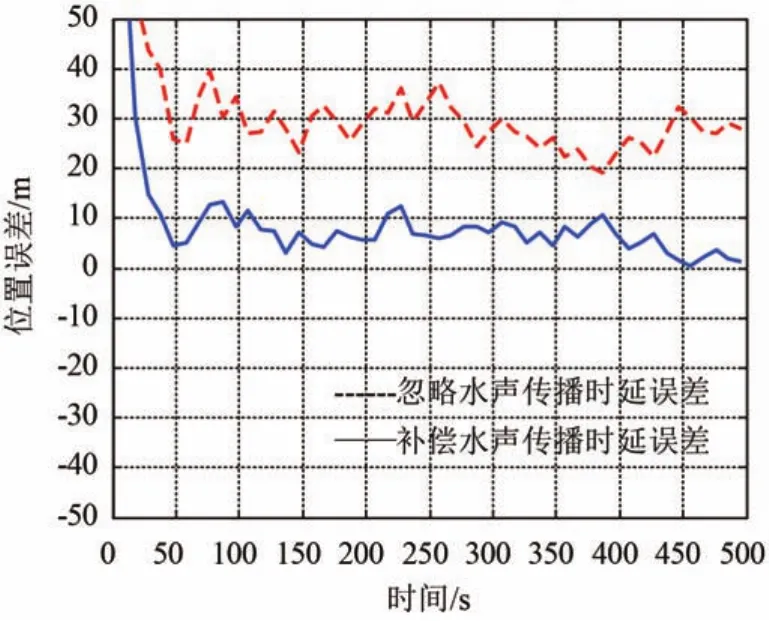
圖3 慣導定位誤差曲線Fig. 3 INS positioning error curve
由圖3 可以看出,如果不進行水聲傳播時延誤差補償,則經過水聲測距修正后,慣導定位誤差仍然超過 30 m,采用本文方法進行補償后,定位精度可達到10 m 以內。可見,本文方法可有效補償潛器運動和水聲傳播時延帶來的誤差。
4 結 語
本文提出慣導/多信標測距組合導航實現方法,用于潛器慣導定位誤差修正,并主要針對由于潛器運動及水聲傳播時間延遲導致的誤差進行分析,并給出補償方法。即利用潛器在一個 Ping 采樣周期內,慣導短時相對精度較高的特點,通過對慣導位置誤差狀態的前推,重構量測方程,與量測信息時間匹配,以修正時間延遲造成的誤差。最后進行數學仿真,驗證了方法的有效性。
參考文獻:
[1]劉芙蓉, 陳輝. 自主式水下潛器研究開發綜述[J]. 艦船科學技術, 2008, 30(5): 20–23. LIU Fu-rong, CHEN Hui. A review of the development and research of autonomous underwater vehicles[J]. Ship Science and Technology, 2008, 30(5): 20–23.
[2]冀大雄, 劉健, 周波, 等. 深水機器人低成本導航系統的位置估計方法研究[J]. 儀器儀表學報, 2009, 30(1): 35–38. JI Da-xiong, LIU Jian, ZHOU Bo, et al. Position estimation method for deep water vehicle using low-cost navigation sensors[J]. Chinese Journal of Scientific Instrument, 2009, 30(1): 35–38.
[3]張立川, 徐德民, 劉明雍. 雙偽測量的多水下航行器移動長基線協同導航算法[J]. 火力與指揮控制, 2013, 38(1): 34–36. ZHANG Li-chuan, XU De-min, LIU Ming-yong. Cooperative navigation method of multiple autonomous underwater vehicles based on double acoustic measurement[J]. Fire Control &Command Control, 2013, 38(1): 34–36.
[4]張福斌, 馬朋. 一種基于虛擬移動長基線的多AUV協同導航算法[J]. 魚雷技術, 2013, 21(2): 115–119. ZHANG Fu-bin, MA Peng. A cooperative navigation algorithm of multiple AUVs based on synthetic moving long baseline[J]. Torpedo Technology, 2013, 21(2): 115–119.
[5]ENGEL R, KALWA J. Relative positioning of multiple underwater vehicles in the GREX project[C]//Proceedings of the 2009-EUROPE Oceans. Bremen: IEEE, 2009: 1–7.
[6]WOITHE H C, KREMER U. Using slocum gliders for coordinated spatial sampling[C]//Proceedings of the 2011 IEEESpain Oceans. Santander: IEEE, 2011: 1–8.
[7]劉明雍, 黃博, 蔡挺. 一種基于量測偽距的EKF移動長基線AUV協同導航方法[J]. 魚雷技術, 2012, 20(6): 432–436. LIU Ming-yong, HUANG Bo, CAI Ting. A cooperative navigation method of EKF moving long baseline for AUV based on pseudo-range measurements[J]. Torpedo Technology, 2012, 20(6): 432–436.
[8]高偉, 楊建, 劉菊, 等. 基于水聲通信延遲的多UUV協同定位算法[J]. 系統工程與電子技術, 2014, 36(3): 539–545. GAO Wei, YANG Jian, LIU Ju, et al. Cooperative location of multiple UUVs based on hydro-acoustic communication delay[J]. Systems Engineering and Electronics, 2014, 36(3): 539–545.
[9]陳云飛, 李桂娟, 賈兵, 等. 水下合作目標三維定位技術[J].艦船科學技術, 2010, 32(5): 48–51. CHEN Yun-fei, LI Gui-juan, JIA Bing, et al. Underwater cooperate target 3D positioning[J]. Ship Science and Technology, 2010, 32(5): 48–51.
[10]葛錫云, 申高展, 潘瓊文, 等. 基于慣性導航/地磁的水下潛器組合導航定位方法[J]. 艦船科學技術, 2014, 36(11): 120 –124. GE Xi-yun, SHEN Gao-zhan, PAN Qiong-wen, et al. The underwater integrated navigation method of underwater vehicle based on INS/geomagnetic[J]. Ship Science and Technology, 2014, 36(11): 120–124.
INS positioning error correction based on acoustic propagation time compensation
CHEN Jian-hua, ZHU Hai, GUO Zheng-dong, LUAN Lu-yu
(Navy Submarine Academy, Qingdao 266042, China)
Abstract:In allusion to positioning error correction for underwater vehicle INS(Inertial Navigation System), the INS/multi-becons acoustic range measurements integrating method is proposed. The error result from vehicle motion and acoustic propagation time is mainly analyzed, and a correcting positioning error algorithm based on acoustic propagation time compensation is presented. In this algorithm, the EKF(Extended Kalman Filters) is adopted, and the measurement equation is reconstructed via pushing-forward the INS’s position error states. As a result, the measurement equation and the system measurement become synchronous, and the error from time delay is eliminated. The simulation results indicate that the algorithm can significantly improve the accuracy of correcting INS positioning error with INS/multi-becons acoustic range measurements integrated navigation system.
Key words:INS;positioning error;EKF;acoustic propagation time
作者簡介:陳建華(1987–),男,博士研究生,主要從事水下導航及信息融合技術研究。
收稿日期:2015–07–16; 修回日期: 2015–09–06
文章編號:1672–7619(2016)03–0097–04
doi:10.3404/j.issn.1672–7619.2016.03.020
中圖分類號:U666.11
文獻標識碼:A