基于自適應SENT協議的電機控制系統設計
2016-05-21 08:53:24杜克奎天津工業大學電子與信息工程學院天津300387
天津工業大學學報 2016年2期
黃 鵬,杜克奎,榮 鋒,魯 勇(天津工業大學電子與信息工程學院,天津 300387)
?
基于自適應SENT協議的電機控制系統設計
黃鵬,杜克奎,榮鋒,魯勇
(天津工業大學電子與信息工程學院,天津300387)
摘要:針對傳統電機的模擬信號輸出和PWM信號輸出分辨率不高、抗電磁干擾能力差的問題,開發了一套電機控制系統.該系統兼容模擬信號輸出和多種SENT協議的信號解析方式,以32位的STM32F103VCT6單片機為核心處理器,接收三軸霍爾傳感器的角度信息,并根據上位機下發的目標角度對電機進行PID閉環驅動.經實驗測試驗證,該系統能夠精準地控制電機的旋轉位置,能夠實現多種協議的兼容.在SENT協議模式下,電機旋轉的角度誤差均在0.12%以內,誤差低于傳統的模擬信號輸出方式.
關鍵詞:STM32F103VCT6;自適應SENT協議;電機控制系統;三軸霍爾傳感器
電動機是發明和使用最早的電機之一,可以實現平滑而經濟地調速,不需要其他設備配合,只要改變輸入或勵磁電壓電流就可實現調速,故在現代生產生活中得到廣泛應用[1].
相比于傳統的電機控制系統,基于三軸霍爾位置傳感器的精確電機控制系統在一些要求比較高的電機控制領域逐步得到了應用[2].但是一般是基于模擬和PWM的輸出方式.這2種信號輸出方式抗電磁干擾能力弱,精度不夠高,成本較高.美國汽車工程師學會(SAE)于2008年制定了SENT 2008(SAE J2716-2008)協議標準,2010年又制定了新的SENT 2010(SAE J2716-2010)協議標準,旨在于提供更精確有效并且低成本的電機控制解決方案. SENT為汽車傳感器新型接口標準.相比于模擬信號輸出和PWM輸出方式,基于SENT協議的電機控制是一種可以有效降低成本、節省線束、節省插針結頭的低成本方案,具有很好的EMC特性,并且能傳輸故障代碼從而使傳感器系統具有很強的故障診斷能力.它有助于取代傳感器和微控制器之間的模擬信號傳輸.本文正是采用了基于這種協議的電機系統控制方式,并設計了整套的電機控制系統.
本文中用到的霍爾位置傳感器為MLX90324和MLX90367,它們是CMOS Triaxis霍爾傳感器,給出了一個平行于芯片表面磁場的角位置,是專為非接觸式旋轉位置傳感器設計的. CMOS Triaxis霍爾傳感器檢測出定位和轉動在設備表面上的一塊小磁鐵的絕對角位置. MLX90324既能支持模擬輸出,也支持2008版協議的SENT信號輸出,而MLX90367只支持2010版協議的SENT信號輸出.對于一個未知信號輸出的電機模塊,MCU如何去自適應它將是今后面臨的一個問題.本文將討論這3種信號輸出方式以及解析方法,并設計一套自適應SENT協議的電機控制系統.
1 SENT2008 和SENT2010 協議分析
SENT協議的全稱為單邊半字節傳輸(single edge nibble transmisson)協議,是一種單線異步串行通信協議,是一種類PWM的信號輸出方式. 2008版協議一幀數據的長度包含8個Nibble和1個校驗位(1個Nibble由4個Bit組成,Nibble值的范圍是0~15,由12~27個Tick表示,1個Tick的范圍是3~10 μs,一般是3 μs左右),如圖1所示.
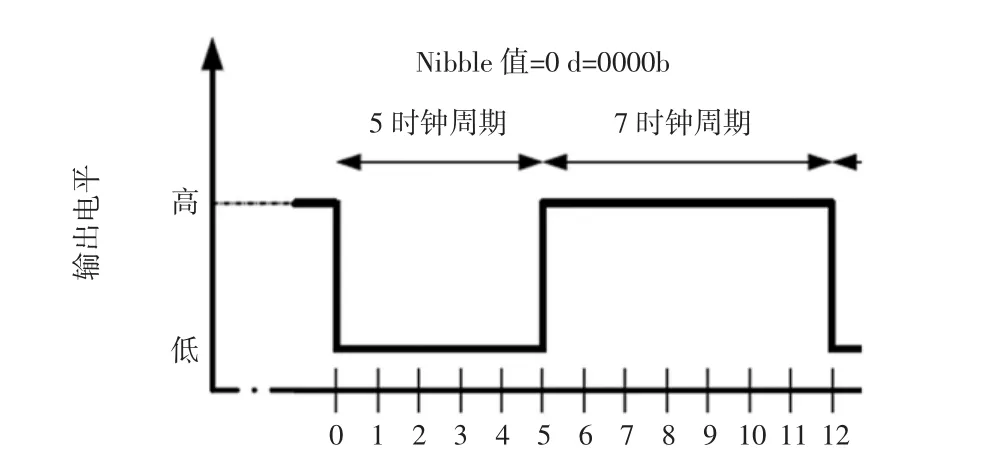
圖1 Nibble值為0Fig.1 Nibble value is zero
圖1中內容分別如下:
Nibble 0:56個Tick的同步校驗位
Nibble 1:狀態位(判斷芯片是否工作正常)
Nibble 2:角度的高4個Bit
Nibble 3:角度的中間4個Bit
Nibble 4:角度的低4個Bit
Nibble 5:滾動計數器的高4個Bit(用來判斷芯片是否在正常工作)
Nibble 6:滾動計數器的低4個Bit
Nibble 7:Nibble 2的反轉
Nibble 8:CheckSum位
2010版的SENT報文包含8個Nibble,1個校驗位以及1個可變暫停位,如圖2所示.
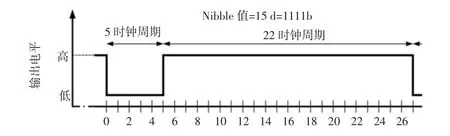
圖2 Nibble值為15Fig.2 Nibble value is fifteen
圖2中內容分別如下:
Nibble 0:56個Tick的同步校驗位
Nibble 1:狀態位(判斷芯片是否工作正常)
Nibble 2:角度的高4個Bit
Nibble 3:角度的中間4個Bit
Nibble 4:角度的低4個Bit
Nibble 5:滾動計數器的高4個Bit(用來判斷芯片是否在正常工作)
Nibble 6:滾動計數器的低4個Bit
Nibble 7:Nibble 2的反轉
Nibble 8:CheckSum位
Nibble 9:可變暫停位(12~768個Tick)
SENT是一種點對點的單方向從傳感器到控制端的協議,每一個Nibble數據被編碼成PWM方式.先輸出5個Tick的低電平,然后輸出7+n(n的范圍是0~15)個Tick的高電平.傳感器信號以一串方波來傳送,方波下降沿之間時間的長短表示信號的大小.傳感器上電后會立即發送數據,接收機不需要任何同步校驗信號.設計這種協議的目的是用在與汽車ECU快速交互信息的傳感器上,以此來取代低精確度的12 bit AD 和PWM.
2 系統設計
本系統以意法半導體公司的STM32F103VCT6為控制核心.驅動器使用的是飛思卡爾的MC33886.控制器與上位機之間通過CAN-232轉換模塊進行通信.如圖3所示.圖3中,上位機通過CAN-232模塊向MCU發送目標角度命令,控制電機旋轉到目標位置,電機旋轉過程中磁鐵與霍爾傳感器的相對位置發生變化,MCU可檢測到電機當前角度. MCU實時的將當前角度和目標角度兩個參數送入PID算法中計算出一個控制量PWM_OUT.這樣就組成了一個帶閉環PID算法的電機控制系統.
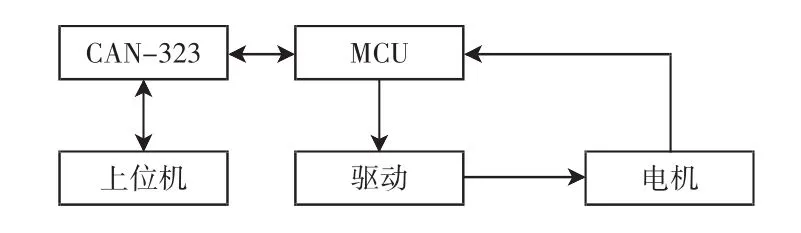
圖3 系統整體框圖Fig.3 Overall block diagram of system
2.1硬件設計
本系統分別設計了基于MLX90324和MLX90367 的3組電機信號輸出電路.信號處理單元采用單片機實現. STM32F103VCT6是ARM公司的STM32增強型系列,內部使用32位的Cortex-M3內核,工作頻率為72 MHz,內置高達128 kB的閃存和20 kB的SRAM,所有型號的器件均包含2個12位的ADC、3個通用16位定時器和一個PWM定時器,還包含標準和先進的通信接口:多達2個I2C和SPI、3個USART、一個USB和一個CAN.工作溫度范圍為-40~105℃,供電電壓為2.0~3.6 V.該內核是專門設計用于滿足集高性能、低功耗、實時應用、具有競爭性價格于一體的嵌入式領域的要求[3-4].
2.1.1傳感器設計
位置傳感器采用的是Melexis公司的MLX90324 和MLX90367,MLX90324和MLX90367的優點如下:
(1)絕對旋轉位置傳感器IC;
(2)Trixis霍爾技術-非接觸式;
(3)完整的360°角或有限角度的應用;
(4)-40~150℃環境溫度范圍.
3組電機控制系統如圖4—圖6所示.
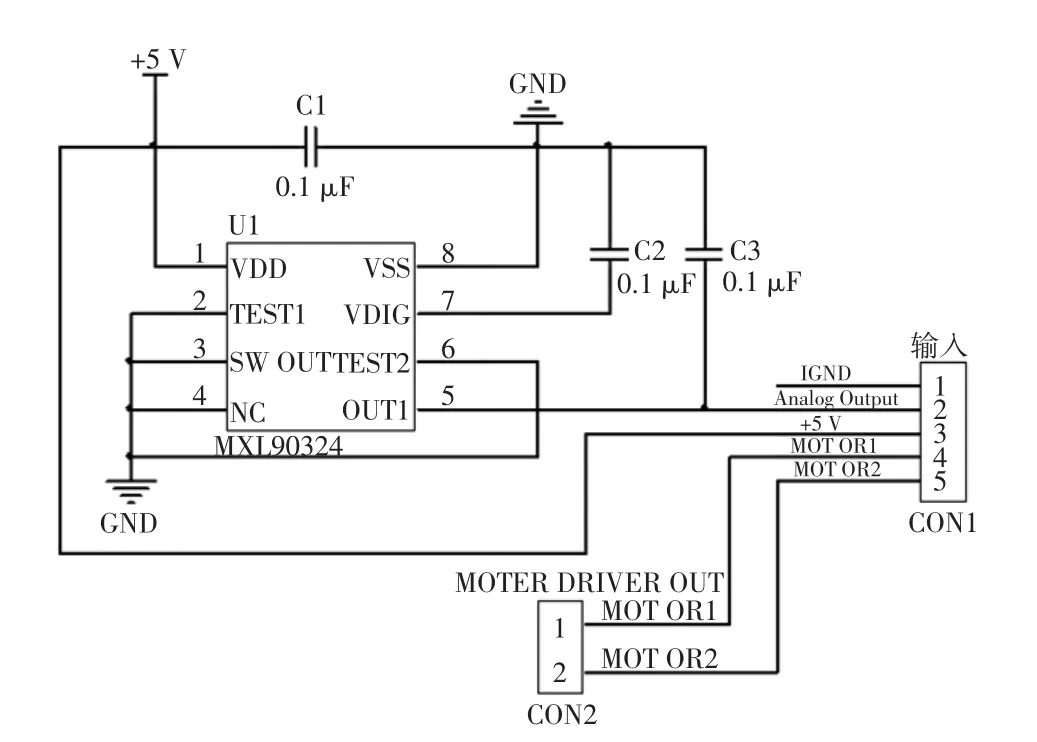
圖4 MLX90324模擬信號輸出Fig.4 MLX90324 analog output
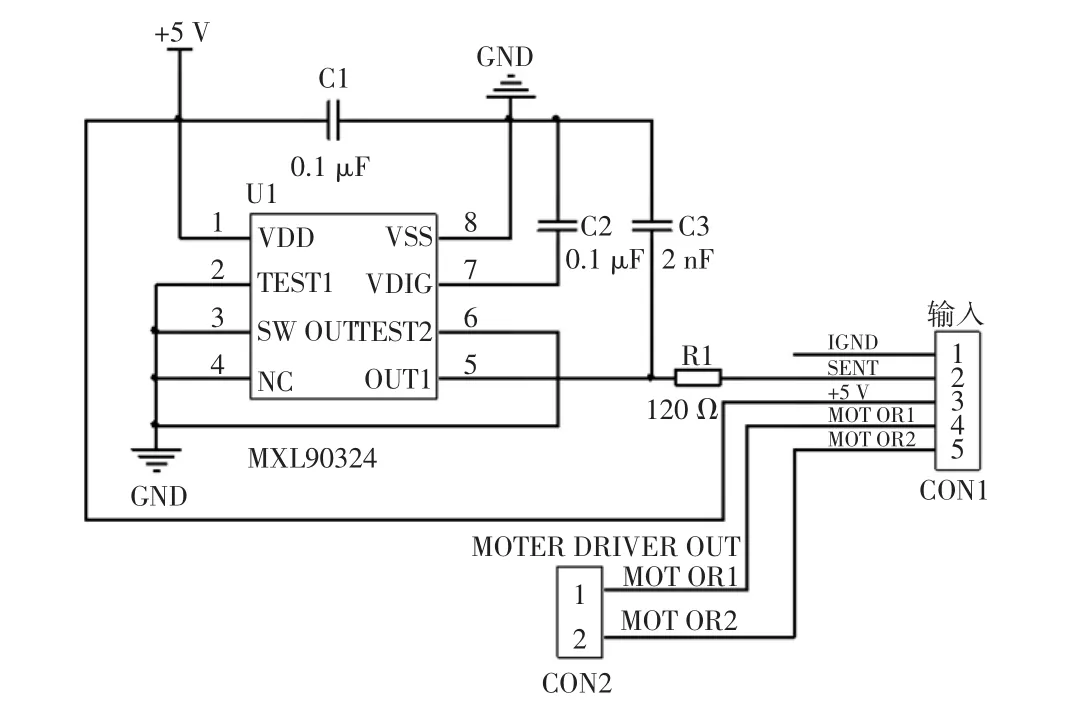
圖5 MLX90324 SENT信號輸出Fig.5 MLX90324 SENT output

圖6 MLX90367 SENT信號輸出Fig.6 MLX90367 SENT output
2.1.2電機驅動模塊設計
直流電機驅動采用飛思卡爾公司的5 A集成H橋芯片MC33886. MC33886芯片內置了控制邏輯、電荷泵、門驅動電路以及低導通電阻的MOSFET輸出電路,適合用來控制感性直流負載,可以提供連續的5 A電流,并且集成了過流保護、過熱保護、欠壓保護.通過控制MC33886的四根輸入線可以方便地實現電機正轉、能耗制動及反接制動.使用2片MC33886并聯,一方面減小導通電阻對電機特性的影響,另一方面減小MC33886內部的過流保護電路對電機啟動及制動時的影響[5-6],如圖7所示.
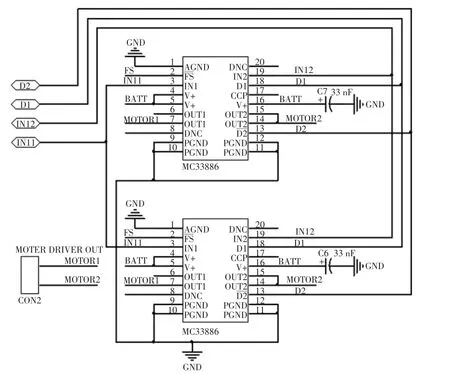
圖7 MC33886電機驅動電路Fig.7 MC33886 motor drive circuit
2.1.3 CAN收發模塊設計
本設計采用的CAN總線驅動器是由Philips公司生產的TJA1040,該器件設計的目的是用以替代82C250的高速CAN總線驅動器. TJA1040提供了CAN控制器與物理總線之間的接口以及對CAN總線的差動發送和接收功能,同時還具有極低功耗的待機模式,以及通過總線喚醒能力.當TJA1040斷電時,總線反向電流為零,這樣,沒有接通電源的節點不會對網絡其他部分造成影響[7-12],實際上它們此刻是不可見的.這種特性使得TJA1040非常適用于局部網絡中的供電與點火開關相連的節點.設計電路如圖8所示.
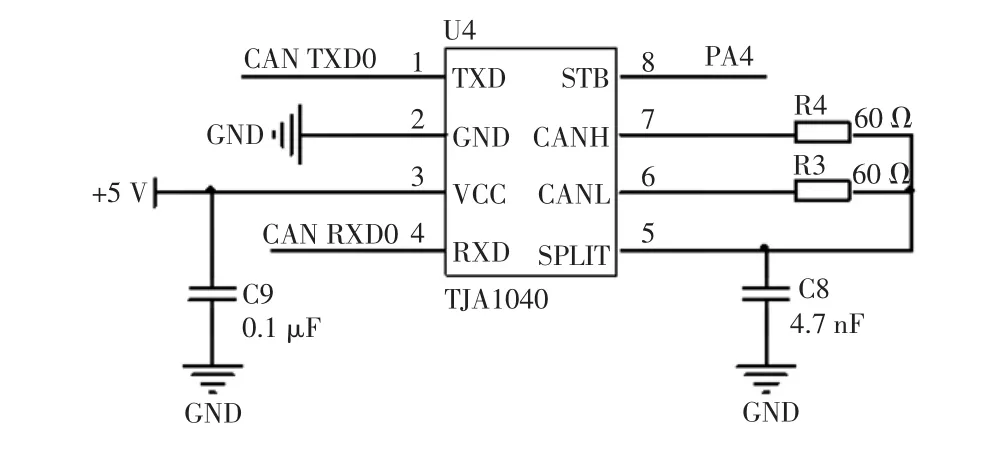
圖8 CAN總線接口設計Fig.8 Design of bus interface
2.2軟件設計
由于2010版SENT協議比2008版SENT協議多出一個可變的暫停位,這個暫停位的變化范圍為12~768 個Tick.該暫停位可能與幀頭56個Tick相等,所以就不能用56個Tick的同步位來判斷幀頭了.
SENT協議的解析是使用定時器來采集2次下降沿之間時間的長短來解析數據大小的,SENT信號的下降沿觸發定時器中斷.當采集到56個Tick的數據時,先暫時認為這是幀頭,當再次采集到56個Tick長度的數據時,判斷在這期間觸發了幾次中斷,若一次,說明上次采集到的值是暫定位,這次才是真正的幀頭,并且可以判定連接的是MLX90367.若觸發了10次,則說明上次采集的就是幀頭,而這次采集的是第二幀的開始,并且可以判斷出連接的芯片是MLX90367.若觸發了9次,則說明這2次采集的都是幀頭,而且通過一幀數據的長度可以判定出連接的芯片是MLX90324.只要能判定出連接的是哪種芯片,就可以做到2種協議的兼容.
系統軟件設計流程圖如圖9和圖10所示.
圖9為主函數流程圖和目標角度接收流程圖.通過CAN中斷接收上位機發送的目標角度命令.主函數對當前角度與目標角度進行實時處理,若當前角度與目標角度不相等,則PID算法不斷的改變輸出量來驅動電機向目標位置旋轉.當前角度與目標角度相減滿足一定的誤差范圍便停止輸出,使電機停止轉動.
圖10為SENT解析流程圖. SENT的解析是通過定時器的輸入捕捉中斷功能實現的,捕捉2次下降沿之間的時間大小來解析代表的數值.
進入中斷后先判斷幀頭,然后判斷出所選的芯片是基于哪個版本的SENT協議,進而可以判斷出需要接收多少個Nibble的數據.如果是基于SENT 2008協議,則需要接收8個Nibble的信息,如果是基于SENT 2010協議,則需要接收9個Nibble的信息.這樣就完成了一幀數據的接收.完成一幀數據接收后,開始CRC驗證,驗證通過后解析SENT信息中的角度.
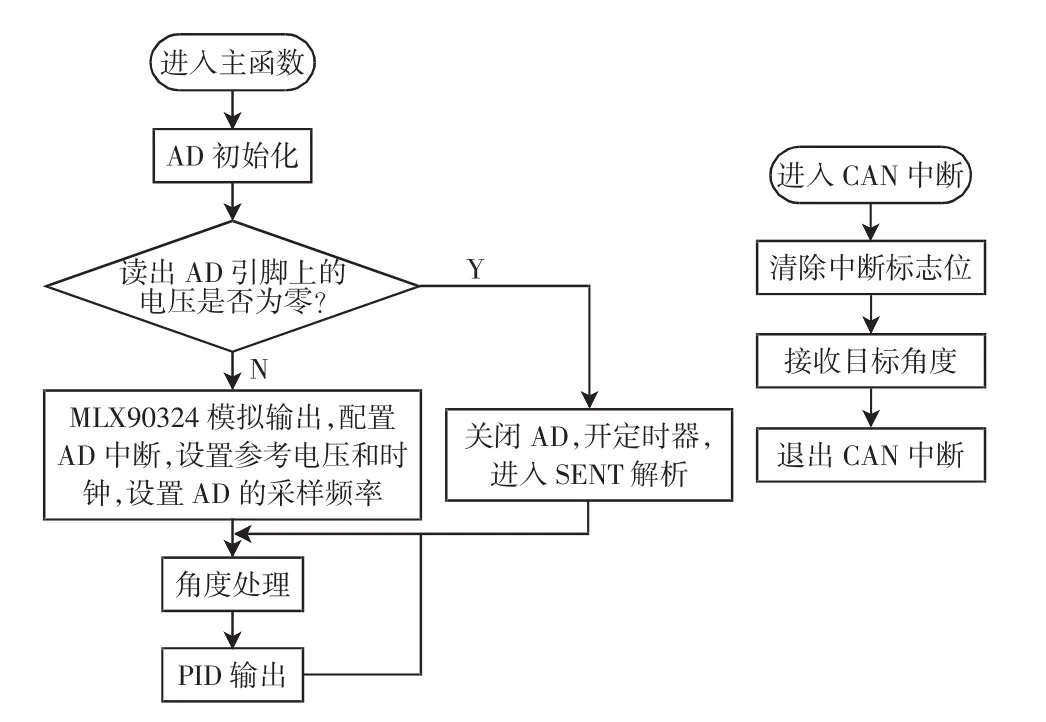
圖9 主函數流程圖和目標角度接收流程圖Fig.9 Main function flow chart and target angle to receive a flow chart

圖10 SENT解析流程圖Fig.10 SENT analysis flow char
3 測試結果與分析
圖11為上位機控制電機旋轉的上位機界面,圖中的曲線1為目標角度的時間-角度曲線圖,曲線2為實際角度的時間-角度曲線圖.電機按照預先設定好的時間-角度旋轉.
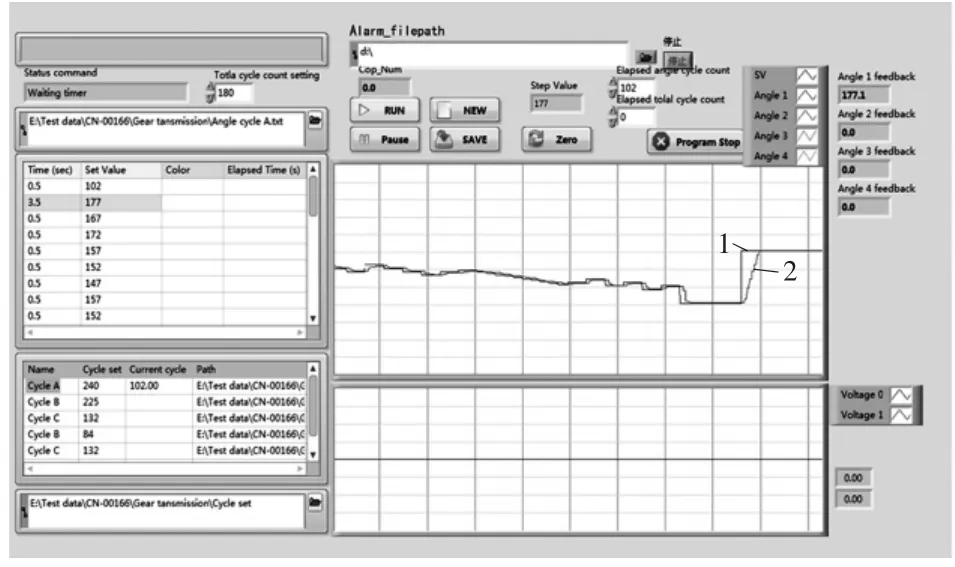
圖11 上位機界面Fig.11 PC interface
圖12、圖13和圖14為電機旋轉主控軟件界面,可設定電機旋轉的目標角度,按ENTER鍵電機就會旋轉到相應的角度,并且自動設別出接口類型.

圖12 2008版SENT協議輸出Fig.12 2008 edition SENT protocol output

圖13 2010版SENT協議輸出Fig.13 2010 edition SENT protocol output
圖14為捕捉到的處于旋轉路徑上的電機主控軟件界面圖.分別實測了3種信號輸出方式下目標角度與實際角度的數值,每組重復測試了50次,分析實驗數據得到,SENT 2008協議下的角度誤差約為0.116%,SENT 2010協議下的角度誤差約為0.103%,而模擬信號輸出方式下的角度誤差約為0.977%,2種SENT協議下的電機旋轉控制精度明顯高于傳統的模擬信號輸出方式.

圖14 模擬信號輸出Fig.14 Analog output
4 結語
本文在傳統電機控制模擬信號輸出和PWM的基礎上,結合了近年提出的基于SENT協議的電機控制方法,設計了一套電機控制系統,并給出了一種判別電機模擬信號輸出和基于SENT協議信號輸出的自適應方法.經過實驗驗證,該套系統能做到信號輸出模式自適應.上位機通過向MCU發送目標角度,MCU根據當前角度輸出控制量驅動電機旋轉,然后實時將當前角度上傳到上位機進行顯示.測試結果表明電機的旋轉角度誤差均在0.12%以內,得到了精確控制.
參考文獻:
[1]曾華.有刷直流電機振動轉矩的解析與實驗研究[J].輕工機械,2014,32(1):70-74. ZENG H. Analytical and experimental study of vibration torque DC motor [J]. Light Industry Machinery. 2014,32(1):70-74. (in Chinese)
[2]劉榮先,崔守鷙,秦永法.霍爾元件的后置油門優化設計[J].重慶大學學報,2013,12:98-102. LIU R X,CUI S Z,QIN Y F. Rear throttle optimization based on the Hall element [J]. Journal of Chongqing University,2013,36(12):98-102(in Chinese).
[3]陳科球,劉彭義.基于MLX90316的汽車油門踏板的設計與研究[J].電子技術應用,2013,39(10):53-55. CHEN K Q,LIU P Y. Design and research for automobile accelerator pedal based on MLX90316 [J]. Application of Electronic Technique,2013,39(10):53-55(in Chinese).
[4]朱何,李勝,阮健.基于Mlx90316的電-機械轉換器角位移測控系統[J].機電工程,2012,29(9):1046-1049. ZHU H,LI S,RUAN J. Angular position test system of electromechanical convertor based on Mlx90316 [J]. Mechanical & Electrical Engineering Magazine,2012,29(9):1046- 1049 (in Chinese).
[5]蔣莉,胡建人,秦會斌.基于FFT與STM32 MCU的渦街信號處理系統設計[J].杭州電子科技大學學報,2010,30 (5):5-8. JING L,HU J R,QIN H B. Design of vortex signal processing system based on FFT & STM32MCU [J]. Journal of Hangzhou Dianzi University,2010,30(5):5-8(in Chinese).
[6]賈鵬輝,陳輝,周平義.基于STM32F103VCT6的振弦式傳感器數據采集系統[J].儀表技術與傳感器,2015(2):67-70. JIA P H,CHEN H,ZHOU P Y. Design of vibrating-wiresensor data acquisition system based on STM32F103VCT6[J]. Instrument Technique and Sensor,2015(2):67-70(in Chinese).
[7]林濤,馬騰煒,陳亞勛,等.基于MCU的自動尋跡智能車控制系統的設計[J].自動化與儀表,2012,27(11):1-4. LIN T,MA T W,CHEN Y X,et al. Control system of automatically tracing intelligent vehicle based on the MCU[J]. Automation & Instrumentation,2012,27(11):1-4(in Chinese).
[8]孫梅,張森林.基于Arduino模塊化機器人視覺系統的研究與設計[J].華中師范大學學報:自然科學版,2014,48 (4):511-515. SUN M,ZHANG S L. The research and design of robot′s vision system based on Arduino modular[J]. Journal of Huazhong Normal University:Nat Sci,2014,48(4):511-515(in Chinese).
[9]沈三民,李俊,譚秋林,等.基于C8051F040的CAN總線技術的多節點通信網絡設計[J].儀表技術與傳感器,2011(2):60-62. SHEN S M,LI J,TAN Q L,et al. Design of multi-point communications network based on CAN bus of C8051F040 [J]. Instrument Technique and Sensor,2011(2):60-62(in Chinese).
[10]冉振亞,周智慶,李越,等.電動汽車CAN總線驅動控制系統設計[J].重慶大學學報,2008,31(6):603-609. RAN Z Y,ZHOU Z Q,LI Y,et al. A controller area networkbased electric vehicle drive system design [J]. Journal of-Chongqing University,2008,31(6):603-609(in Chinese).
[11] SREEDHAR V. Plug-in hybrid electric vehicles with full performance[C]// Electric and Hybrid Vehicles. Pune:IEEE Press,2006:1-2.
[12] KRAFTD.Controllerareanetwork(CAN)[J].VDI-Buch,2006,58(4):37-40.
[13]李晉華,邱春玲,田地,等.基于CAN總線數據采集系統的設計與實現[J].吉林大學學報:信息科學版,2004,22 (2):134-137. LI J H,QIU C L,TIAN D,et al. Design and realization of data acquisition system based on CAN bus [J]. Journal of Jilin U-niversity:Information Science Edition,2004,22(2):134-137(in Chinese).
[14] Philips Semiconductors. DATA SHEET TJA1040 High speed CAN transceiver [DB/OL]. http://www. zlgmcu. com/philips/can/ tja1040. asp. [2003-02-19].
Design of motor control system based on adaptive SENT protocol
HUANG Peng,DU Ke-kui,RONG Feng,LU Yong
(School of Electronics and Information Engineering,Tianjin Polytechnic University,Tianjin 300387,China)
Abstract:To solve the problems such as low resolution ratio,poor ability to resist electromagnetic interference of traditional motor analog signal output and PWM output,a motor control system is designed. The system is compatible with analog output signals and a variety of analytical methods SENT protocol,the system uses a 32 bit microcontroller STM32F103VCT6 as the core processer unit to receive angle information from the triaxis Hall sensor and drive the motor by the target angle sent by the HOST computer as PID closed-loop control. The experiment results show that the system can control the rotational position of the motor precisely and achieve compatibility with multiple protocols. In the SENT protocol mode,the motor rotation angle error is less than 0.12%,lower than the traditional analog signal output.
Key words:STM32F103VCT6;adaptive SENT protocol;motor control system;triaxis Hall sensor
通信作者:黃鵬(1979—),女,副教授,碩士生導師,主要研究方向為汽車電子學. E-mail:huangpeng@tjpu.edu.cn
基金項目:國家自然科學基金資助項目(61405144)
收稿日期:2015-09-01
DOI:10.3969/j.issn.1671-024x.2016.02.016
中圖分類號:TN913
文獻標志碼:A
文章編號:1671-024X(2016)02-0083-06
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00