基于DSAS算法的直升機貼地飛行在線航跡規劃
2016-05-23 09:36:08陳潔石鵬飛王琳
飛行力學 2016年2期
陳潔, 石鵬飛, 王琳
(西安飛行自動控制研究所 飛控部, 陜西 西安 710065)
?
基于DSAS算法的直升機貼地飛行在線航跡規劃
陳潔, 石鵬飛, 王琳
(西安飛行自動控制研究所 飛控部, 陜西 西安 710065)
摘要:通過改進優化傳統A* 算法,利用動態稀疏A* 搜索(DSAS)算法在線設計了直升機貼地飛行軌跡。該算法采用逆向搜索方式規劃航跡,在遇到新生探測威脅時,只需局部調整受到影響的航跡,減少了重新規劃的范圍,提高了搜索效率。此外,在生成節點時考慮了直升機性能及飛行約束, 優化了搜索范圍;并且根據影響貼地飛行航跡性能的各種因素,設計了航跡代價計算方法;利用層次分析法結合專家分析計算得到最優代價權值。仿真結果表明,該方法在線設計的飛行軌跡能夠較全面地滿足避障、貼地功能,相比稀疏A* 搜索(SAS)算法節省了計算時間。
關鍵詞:貼地飛行; DSAS算法; 在線航跡規劃; A* 算法
0引言
隨著現代防空技術的不斷發展,非隱身飛行器難以從高、中空域突防,貼地飛行戰術成為發展的主要趨勢。直升機作為一種超低空火力平臺,可在30 m以下高度利用地形起伏及雜波對抗防御雷達,在雷達盲區內貼地飛行,具有巨大優勢[1]。
在貼地飛行實際任務中,由于規劃環境是動態變化的,預先未知威脅只有在直升機飛行到附近時才能探測識別到準確數據,因此在線航跡規劃是直升機貼地飛行的關鍵技術之一[2]。目前在線航跡規劃算法主要有純數學算法及人工智能算法[3]。純數學算法包括動態規劃方法[4]、能量狀態法和梯度法等,但在多約束條件下,存在計算繁瑣、計算量較大和時間較長問題。人工智能方法包括A*搜索算法[5]、蟻群算法[6]、粒子群算法[7]和進化算法[8]等。這類算法具備較好的運算簡易性,相對于其他方法容易達到實時性要求,但為保證最優性和智能性,還需加以改進。
本文針對直升機貼地飛行階段,改進了Szczerba等[9]提出的稀疏A*搜索 (Sparse A*Search, SAS) 算法,采用動態稀疏A*搜索(Dynamic Sparse A*Search, DSAS)算法在三維空間在線設計生成了可行的飛行航跡,通過改進搜索機制,結合飛行約束條件,對代價函數進行加權選取,達到了縮小搜索空間、提高搜索效率的作用。
1算法介紹
1.1傳統A*算法
A*搜索算法進行路徑規劃時,將規劃環境表示為網格形式。首先對當前位置的每個可達網格單元計算代價,然后選擇最低代價的網格單元加入搜索空間。加入搜索空間的新網格單元又被用來產生更多的可能路徑。A*算法采用的代價函數為:

(1)
式中:g(x)為從起始節點START到當前節點x的真實航跡代價;h(x)為啟發函數,表示從當前節點x到目標節點GOAL航跡代價的估值。
1.2DSAS算法
DSAS在線規劃算法是對傳統A*搜索算法的改進。原理如下:當遇到新探測威脅時,采用逆向搜索實時地重新規劃航跡,提高搜索效率。
DSAS算法基于A*算法的節點擴展方式,改進搜索方向,將目標節點作為根節點,從目標位置向直升機當前位置逆向搜索。通過這種改進,當環境威脅發生變化時,只需局部調整搜索圖中受到影響的路徑,可大大減少計算量。
DSAS算法搜索原理如圖1所示。當直升機探測到當前航跡前方存在新的威脅時,DSAS算法將威脅覆蓋區域的航跡節點及其所有后代節點(小實心點)刪除,并將其父節點(空心點)重新插入OPEN表,然后計算擴展節點的代價值,繼續其搜索過程,直到獲得最優的航跡。
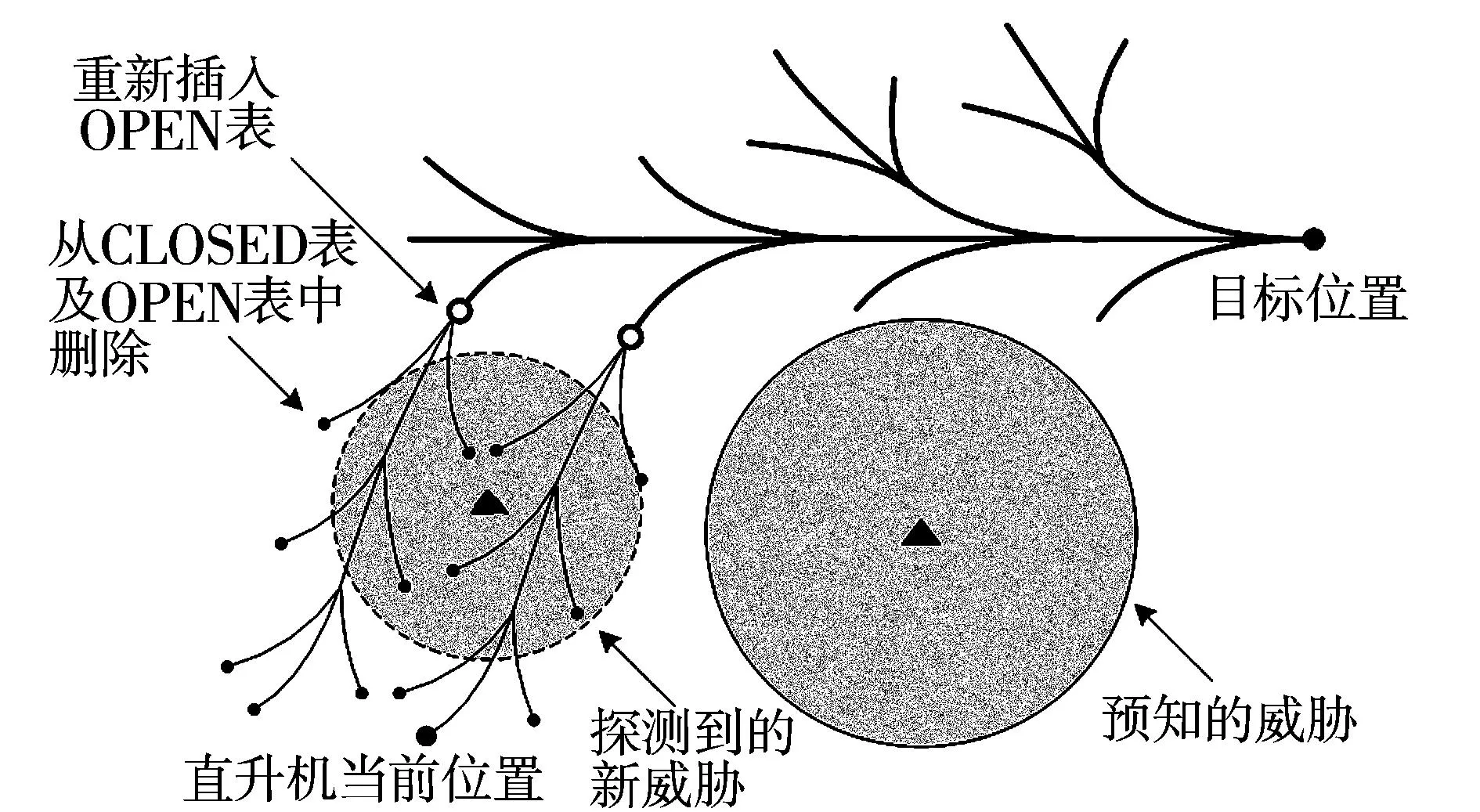
圖1 DSAS算法搜索原理Fig.1 Searching principles of DSAS algorithm
2直升機貼地飛行軌跡設計
2.1規劃空間
本文所研究的直升機貼地飛行階段的在線航跡規劃空間是一個三維網格空間。采用啟發式搜索算法確定規劃空間時,搜索當前節點的擴展鄰域范圍越大,生成的航跡精度越高。然而,若擴展所有鄰域中的網格單元,收斂到最優解則需要大量的時間和內存,并隨規劃區域的增大呈指數增長。因此,本文進行三維航跡搜索擴展節點時,把飛行約束條件結合到搜索算法中去,可以有效優化傳統A*算法的搜索效率。
2.2飛行約束的轉化及航跡節點的生成
直升機貼地飛行航跡規劃中考慮的基本約束主要包括:最小航跡段長度l、最高/最低飛行高度hmax/min、最大拐彎角φ以及最大爬升/下滑角θ。
最小航跡段長度指直升機在開始改變飛行姿態前必須保持直飛的最短距離。這一限制主要取決于直升機的機動能力與直升機的導航要求。合適的最小航跡段長度應大于飛機的最小轉彎半徑。
限制最高飛行高度的目的是防止直升機被敵方雷達探測識別,達到貼地隱蔽飛行的目的;限制最低飛行高度的目的是防止直升機意外撞地。
最大拐彎角限制了生成航跡只能在小于等于最大拐彎角范圍內轉彎。拐彎角計算如下:
(2)
最大爬升/下滑角限制了生成航跡只能在小于等于最大爬升/下滑角范圍內爬升/俯沖。爬升/下滑角計算如下:
(3)
假設給定了直升機的當前節點以及最小航跡段長度、最高/最低飛行高度、最大拐彎角和最大爬升/下滑角,那么從當前節點生成的子節點如圖2所示,僅有有限數量的位置單元。這些單元被限制在一個由四棱錐和球面所包圍的區域內。四棱錐在頂點x處縱向的張角為2θ,在水平方向的張角為2φ,球面半徑為l。
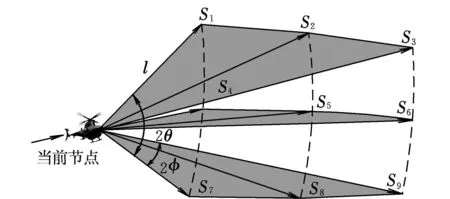
圖2 當前節點的可行搜索范圍Fig.2 Available searching space of present pitch point
本文基于以上分析,考慮直升機的上述制約因素,并進行適當簡化,得到搜索空間如圖3所示。圖中,每個網格取作一個正方體,水平剖面滿足最大拐彎角限制,垂直剖面滿足最大爬升/下滑角限制,最小航跡段長度為其邊長,假設當前節點為x,其三維空間滿足飛行約束的可行子節點的點集為S={S1,S2,…,S21}。
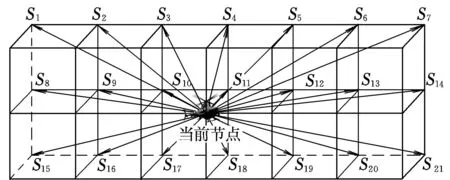
圖3 DSAS算法三維空間搜索示意圖Fig.3 3-D searching diagram of DSAS algorithm
2.3代價函數的選取
代價函數的選取直接影響到規劃航跡的性能。直升機貼地飛行過程中,為了隱蔽飛行,規劃航跡的高度應在安全范圍內盡可能低;考慮到直升機的機動性能,規劃航跡的拐彎次數、拐彎半徑、俯仰角應盡可能小;考慮到直升機的飛行安全性,飛行時間應盡可能短,故規劃航跡的總長應盡可能短,距威脅源的距離應盡可能遠。
根據上述影響飛行器航跡性能的各種因素,本文采用如下航跡代價計算方法:
(4)
式中:ω1,ω2,ω3,ω4為權系數;hi為直升機在節點i的海拔高度,通過高度懲罰降低被敵方雷達發現的概率;li為第i段航跡的長度,單航跡段長度越長,則機動角度越大,通過單航跡段長度懲罰降低航跡的機動程度;di為節點i到目標點的距離,即懲罰航跡總長度;fTAi為節點i處的威脅指數,懲罰威脅影響,計算方法如下:
(5)
式中:c為雷達或威脅常數;r為路徑點到威脅中心的距離。
2.4代價函數權系數的確定
權系數ω1,ω2,ω3,ω4分別表示航跡高度、單航跡段長度、距目標點距離以及威脅影響對航跡綜合性能的影響程度。權系數的取值直接影響規劃航跡的性能,本文采用層次分析法[10]確定權系數向量ω=[ω1,ω2,ω3,ω4]T。
首先由業內專家結合貼地飛行目的、環境、威脅等情況,采用9標度法確定指標i與指標j對航跡代價的影響程度比aij,有aij=ωi/ωj,且有aij=1/aji>0。產生判斷矩陣:
(6)
各參數如表1所示。
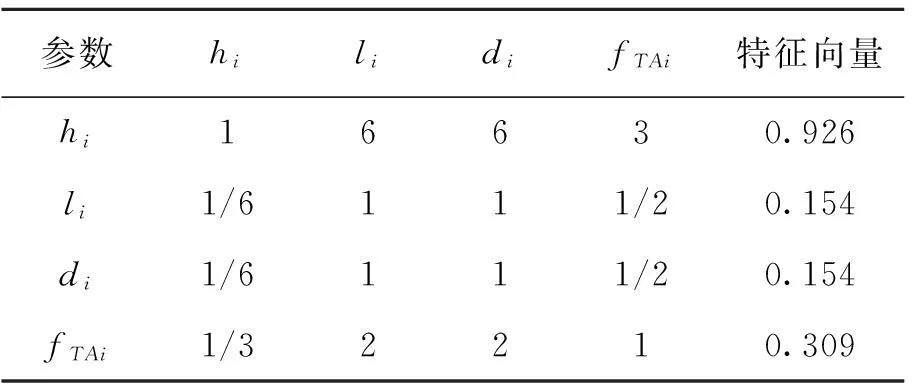
表1 比較判斷矩陣
經驗證:
(7)
(8)
矩陣A具有完全一致性。歸一化后的權系數向量為ω=[0.6,0.1,0.1,0.2]T
3仿真與結果分析
下面對DSAS算法進行仿真驗證,運行環境為Windows XP,編程環境為MATLAB。仿真采用的相關參數取值如下:代價函數權系數ω1=0.6,ω2=0.1,ω3=0.1,ω4=0.2;節點擴展時,選擇3×7=21節點擴展;最小航跡段長度200 m;最低飛行高度5 m,最高飛行高度30 m,最大拐彎角70°,最大爬升/俯沖角45°。
圖4和圖5為根據傳感器探測到的預先未知威脅采用DSAS在線規劃算法所規劃的航跡。圖中:實線區域、短虛線圓形區域分別表示預先已知的禁飛區威脅和雷達威脅;長虛線圓形區域表示預先未知的地形威脅;虛線表示初始規劃航跡;實線表示在線DSAS規劃的路徑。仿真結果表明,直升機在貼地飛行過程中,沿著初始最優航跡飛行到START點時,探測到新生威脅并更新威脅數據,設傳感器為理想傳感器,新探測威脅的中心坐標為(660, 880, 8.066),新威脅覆蓋節點的父節點為P,將P點重新插入OPEN表,從P點向START點繼續規劃得到在線實時規劃的新航跡,如圖4和圖5中的實線所示。
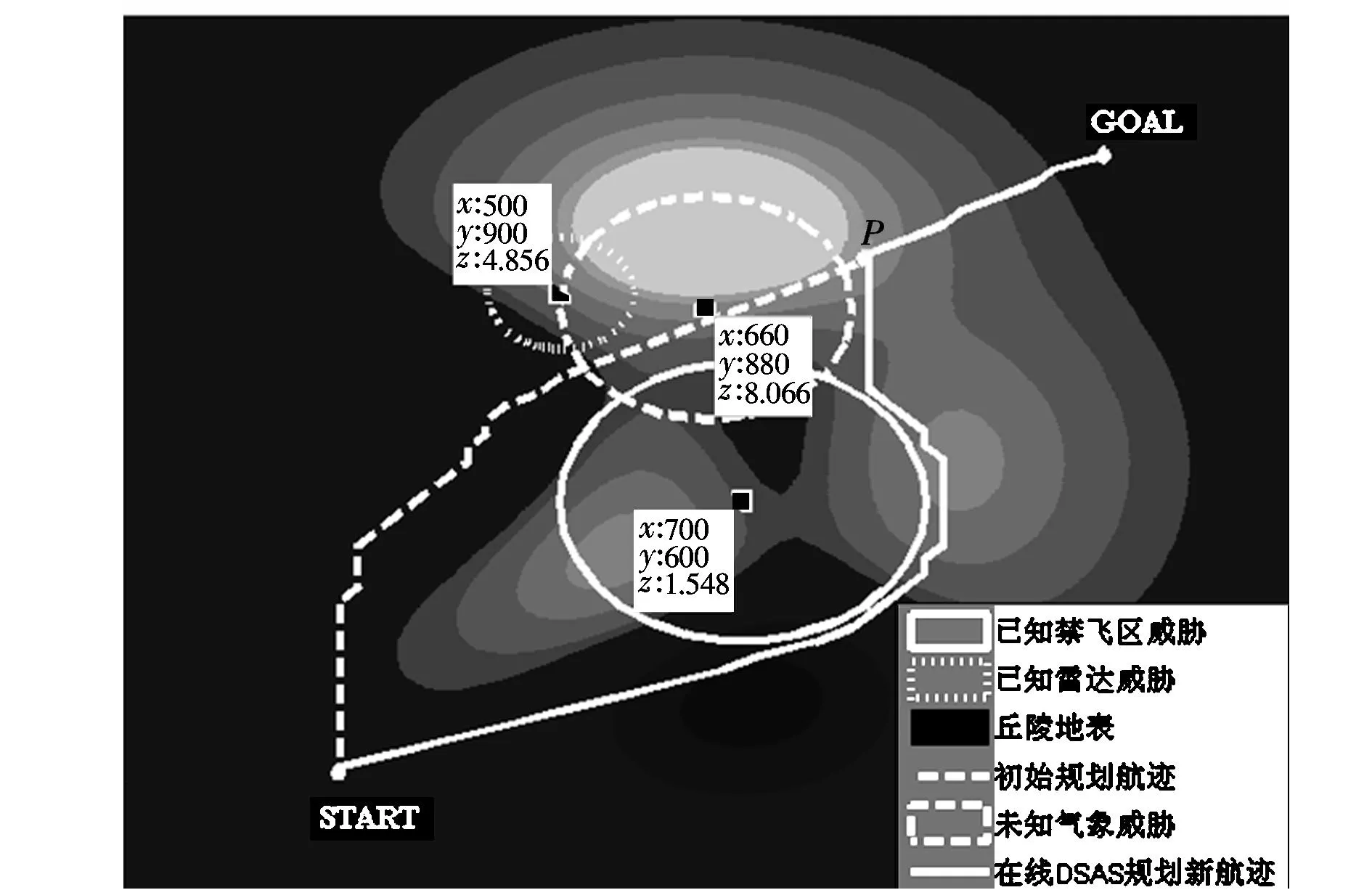
圖4 在線DSAS規劃的2D航跡圖Fig.4 2D chart of online DSAS planned path
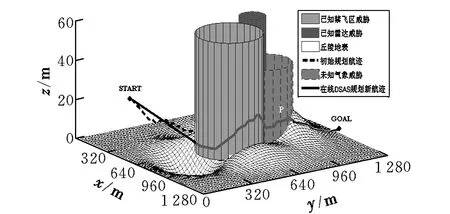
圖5 在線DSAS規劃的3D航跡圖Fig.5 3D chart of online DSAS planned path
在相同仿真條件下,采用SAS算法進行在線重規劃的示意圖如圖6和圖7所示。
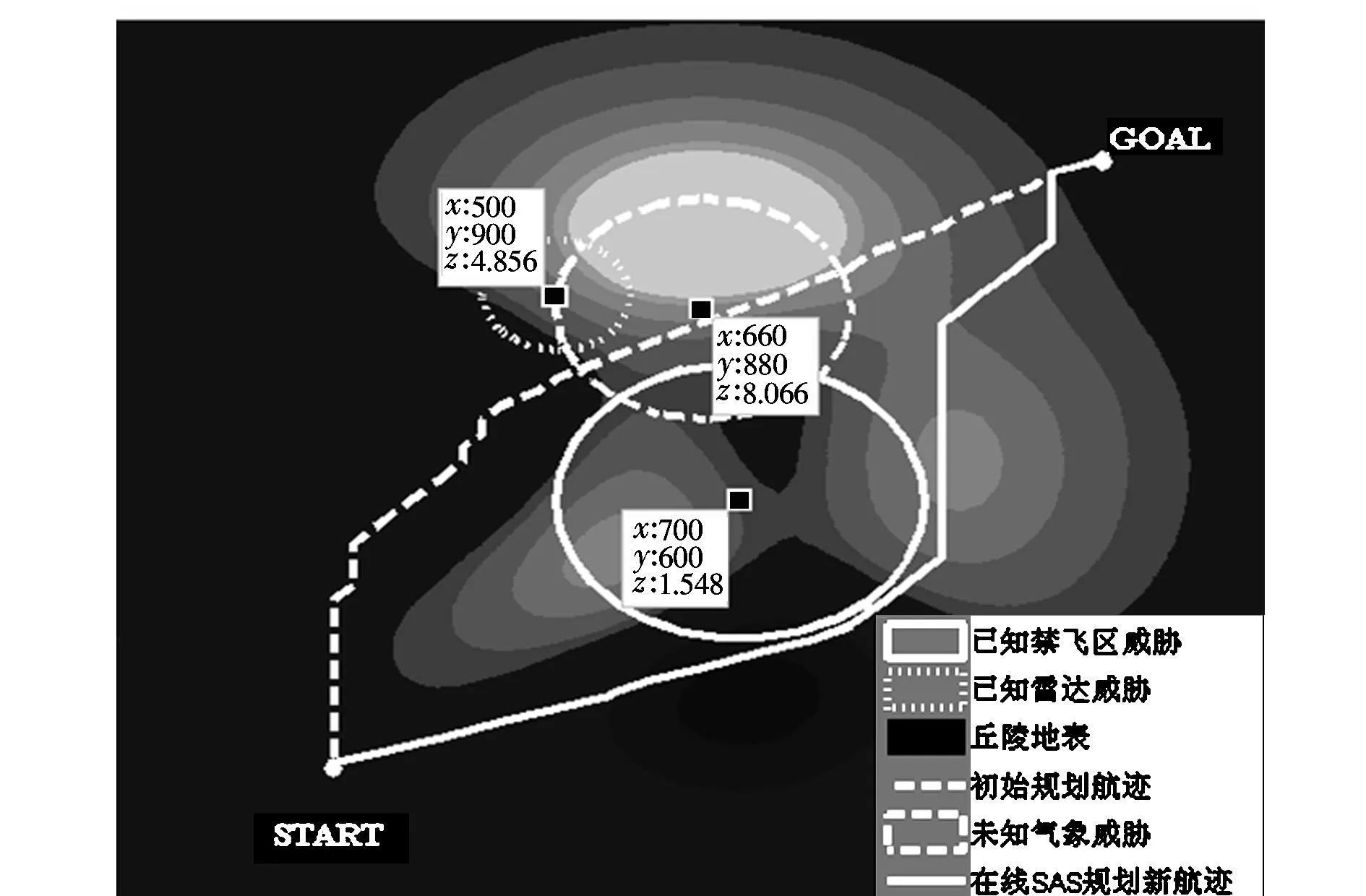
圖6 在線SAS規劃的2D航跡圖Fig.6 2D chart of online SAS planned path

圖7 在線SAS規劃的3D航跡圖Fig.7 Online SAS planned path 3D chart
表2給出了兩種方法仿真結果的比較。從表中可以看出,相比SAS算法,利用DSAS算法規劃路徑節省規劃時間56.03%,減少規劃節點13.3%,減少搜索節點56.17%,航跡總代價減少51.94%。
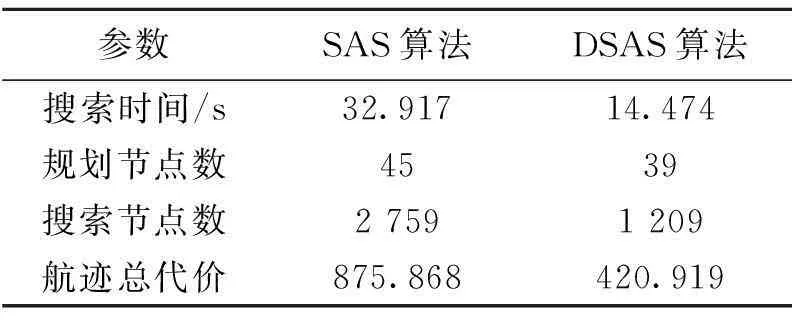
表2 DSAS與SAS仿真結果對比
4結束語
本文將DSAS算法應用到直升機貼地飛行軌跡規劃設計中,通過改進搜索方向,將飛行約束與三維航跡搜索節點結合考慮,確定代價函數的選取,利用層次分析法確定代價函數的權值,有效減小了搜索空間,縮短了搜索時間。從仿真結果可以看出,DSAS算法規劃出的航跡能夠保證直升機有效避開雷達、氣象、地形等障礙威脅,并盡可能地沿著高度低、航跡短的航跡飛行,相比SAS算法計算時間短,實時性更好。
參考文獻:
[1]楊松山.直升機貼地飛行時人-機響應特性研究[J].飛行力學,1992,10(2):36-44.
[2]丁明躍,鄭昌文,周成平,等.無人飛行器航跡規劃[M].北京:電子工業出版社,2009.
[3]胡中華,趙敏.無人飛行器在線航跡規劃技術研究[J].航天電子對抗,2010(4):11-14.
[4]唐振民,趙春霞,楊靜宇,等.基于動態規劃思想的多機器人路徑規劃[J].南京理工大學學報,2003,27(5):610-615.
[5]周成平,陳前洋,秦筱械.基于稀疏 A*算法的三維航跡并行規劃算法[J].華中科技大學學報(自然科學版),2005,33(5):42-45.
[6]張元良,楊巍巍,劉青,等.蟻群算法在路徑規劃中的應用[J].數字技術與應用,2013(5):159-160.
[7]陳冬.基于粒子群優化算法的無人機航跡規劃[D].西安:西北工業大學,2007.
[8]Zhao L,Murthy V R.Trajectory planning with collision avoidance for autonomous helicopter by evolutionary methods path [J].AIAA Journal,2006,10(6):251-264.
[9]Szczerba R J,Galkowski P,Glicktein I S,et al.Robust algorithm for real-time route planning[J].Aerospace and Electronic Systems,IEEE Transactions on,2000,36(3):869-878.
[10]許樹柏.實用決策方法:層次分析法原理[M].天津:天津大學出版社,1988.
(編輯:崔立峰)
Online path planning based on DSAS for helicopter NOE fight
CHEN Jie, SHI Peng-fei, WANG Lin
(Department of Flight Control, Xi’an Flight Automatic Control Research Institute,Xi’an 710065, China)
Abstract:In this paper, dynamic sparse A* search (DSAS) algorithm was used to design helicopter nap-of-earth (NOE) flight path online. DSAS algorithm used backward searching method to plan path, which could reduce re-planning space and improve searching efficiency. Besides, this paper took both helicopter performance and flight restraints into consideration when generating pitch points, which reduced the searching space. The paper also designed the path cost calculating method, and Analytic Hierarchy Process (AHP) was used to figure out the optimal weight value. The simulation results showed that DSAS path planning algorithm could meet the requirements of both obstacle avoidance and NOE flight, and showed significant enhancement over SAS.
Key words:NOE fight; DSAS algorithm; online path planning; A* algorithm
中圖分類號:V249.3
文獻標識碼:A
文章編號:1002-0853(2016)02-0086-04
作者簡介:陳潔(1991-),女,陜西渭南人,碩士研究生,研究方向為先進飛行器控制技術。
收稿日期:2015-04-23;
修訂日期:2015-08-06; 網絡出版時間:2015-09-08 13:57
