無刷直流電動機容錯控制中性能波動的抑制研究
2016-05-25 00:37:34董亮輝劉景林
微特電機 2016年5期
董亮輝,劉景林
(西北工業大學,西安 710072)
無刷直流電動機容錯控制中性能波動的抑制研究
董亮輝,劉景林
(西北工業大學,西安 710072)
容錯控制能夠克服霍爾位置傳感器的故障,使無刷直流電動機繼續運行。然而,在故障檢測過程中,電機會產生較大的異常電流和明顯的轉速波動,這源自于故障信號所引入的故障角。此外霍爾傳感器的安裝誤差也會引起三相不對稱電流,造成低頻轉矩脈動。針對霍爾傳感器的安裝誤差和較小的故障角,提出了轉子角度的估計與平均的方法,將誤差角和故障角對換相點的影響減小為1/3或1/2。對于較大的故障角,根據故障檢測結果的變化情況來消除故障角,并利用歷史數據進行角度估計,從而保證故障檢測過程中電流的合理換相。實驗結果表明,所提出的方法能夠有效地減小安裝誤差引起的電流不對稱,并且明顯地抑制了電機在故障發生后的電流和轉速波動。
無刷直流電動機;容錯控制;波動抑制;瞬態電流;轉速波動;霍爾安裝誤差
0 引 言
近年來,無刷直流電動機驅動的可靠性得到了越來越多的關注[1-2],其中位置傳感器的故障檢測和容錯控制是一個新的研究熱點[3-6]。文獻[3]中構建了一個轉子位置觀測器,比較觀測結果與霍爾傳感器的輸出,利用兩者的差值來檢測傳感器的故障。檢測到故障后,改用觀測器輸出作為轉子位置反饋,實現容錯控制。然而位置觀測器的實現需要增加額外的硬件電路,提高了系統的成本和復雜性,實用性不強。文獻[4]則對電機的線電壓進行測量和離散傅里葉變換,通過諧波分析,確定故障類型。這種故障檢測的方法極大地增加了計算量而且檢測效率較低。隨后,文獻[5]對霍爾傳感器的輸出狀態進行了分析,總結了各種故障情況下霍爾信號的獨特變化序列,然后將傳感器的輸出與這些特征序列進行比較,完成故障檢測。這種方法簡便有效,但是檢測速度仍然很慢,影響容錯控制的效果。最近,文獻[6]提出了兩種故障檢測方法,分別基于霍爾信號跳變順序和電機轉向估計,這兩種方法實現簡單、效率高,明顯地改善了容錯控制性能。
雖然故障檢測的效率在不斷提高,但是,從故障發生到檢測完成仍然需要一段時間(記為故障檢測過程)。在檢測過程中,故障帶來的故障角會影響電機電流的正常換相,從而引起較大的異常電流和轉矩波動。除此以外,霍爾傳感器還會有一定的安裝誤差,這也會影響換相的準確度,引起三相電流不對稱,造成低頻轉矩波動[7]。因此,為了提高無刷直流電動機的容錯控制效果,需要對故障及誤差引起的電機性能波動進行抑制。
本文針對霍爾位置傳感器的安裝誤差和故障角展開研究,提出抑制電機性能波動的方法。首先,利用每個霍爾傳感器對角度進行單獨估計,然后對這些估計角進行平均值計算,根據平均轉角控制電流的換相。這樣,安裝誤差或故障角度對換相點的影響就縮小為1/3(所有霍爾正常工作時)或者1/2(一個霍爾發生故障時)。對于較大的故障角,其1/3或1/2仍然會造成較大的異常電流和轉速波動,因此本文對這種故障情況進行了進一步的研究。通過分析故障檢測結果的變化,在故障發生瞬間,直接將包含故障角的位置信息舍棄,然后利用歷史數據進行角度估計,控制電機在故障檢測過程中正確換相,從而抑制較大的電流和轉速波動。最后,搭建了無刷直流電動機容錯控制平臺,對所提出的方法進行了驗證。實驗結果表明,利用所提出的方法,電機的不對稱電流、異常電流和轉速波動都得到了明顯的抑制,系統的容錯控制性能得到了明顯的提高。
1 無刷直流電動機的驅動和容錯控制
1.1 無刷直流電動機驅動系統
無刷直流電動機驅動系統如圖1(a)所示,包括無刷直流電動機、霍爾位置傳感器、逆變器、主控電路和隔離驅動電路。主控電路根據霍爾傳感器的位置反饋,輸出一定的PWM信號,通過隔離和驅動,控制逆變器為電機提供驅動電流。無刷直流電動機的結構如圖1(b)所示,其中H1,H2和H3分別為三
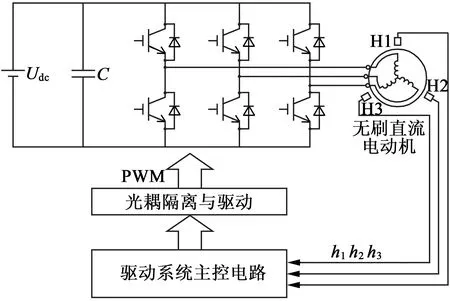
(a) 無刷直流電動機驅動系統
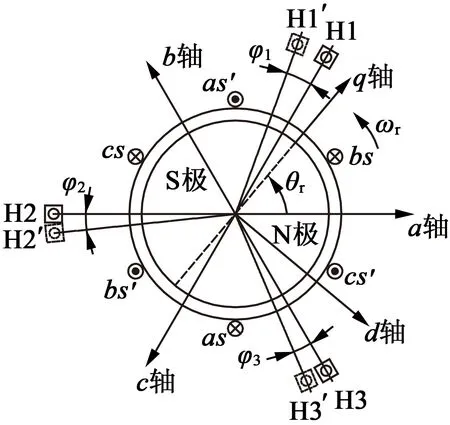
(b) 無刷直流電動機橫界面示意圖
圖1 無刷直流電動機及其驅動系統
個霍爾位置傳感器;θr為轉子位置。理想情況下,三個位置傳感器之間互差120°電角度。然而在實際中,這三個傳感器難以完全精確地安裝,往往存在角度誤差(分別記為φ1,φ2和φ3),如圖1(b)中H1′、H2′和H3′所示。這種情況下,每個霍爾傳感器所反映的角度就不再是電機轉子的實際角度θr,還包含了相應安裝誤差角,分別如下:
(1)
(2)
(3)
由于霍爾傳感器的安裝誤差,無刷直流電動機各相的導通角度不再是均勻的120°,導致三相電流的不對稱現象,并引起電機轉矩的低頻波動[7]。
1.2 故障檢測和容錯控制
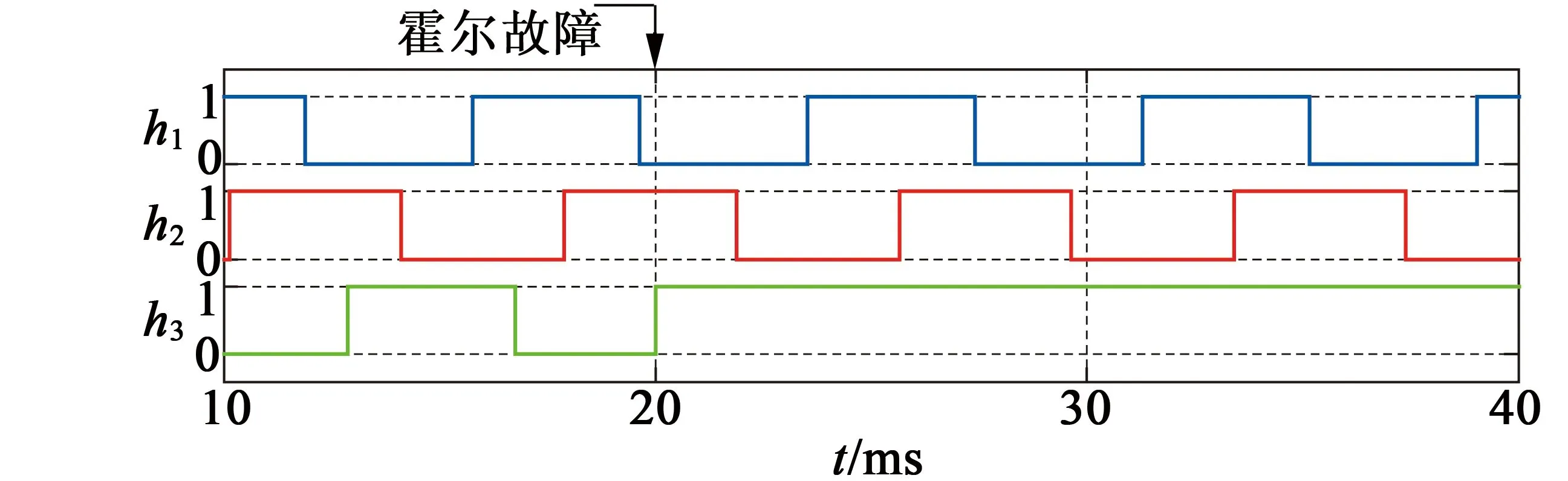
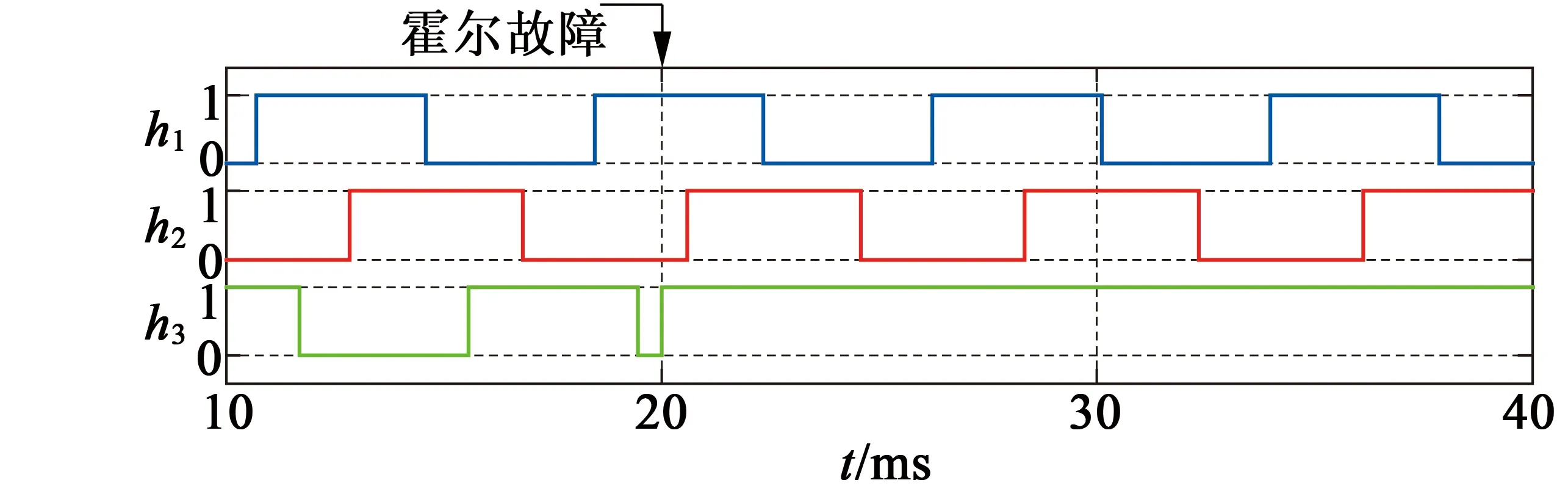
除了安裝誤差外,霍爾傳感器還可能發生故障,如由于霍爾元件失效或者連線發生開路等原因導致某個霍爾信號丟失[5-6]。這種情況下,無刷直流電動機無法正確換相,會出現極大的異常電流,導致電機無法正常轉動,并會引起電機和驅動器的進一步損壞。圖2為一個霍爾傳感器發生故障的情況,其中h1,h2和h3分別是霍爾傳感器H1,H2和H3的輸出信號。當霍爾傳感器(例如H3)發生故障時,檢測到的霍爾信號(h3)將不再發生變化[5-6]。本文所討論的故障主要包括單個或兩個霍爾傳感器發生的故障,具體如表1所示。
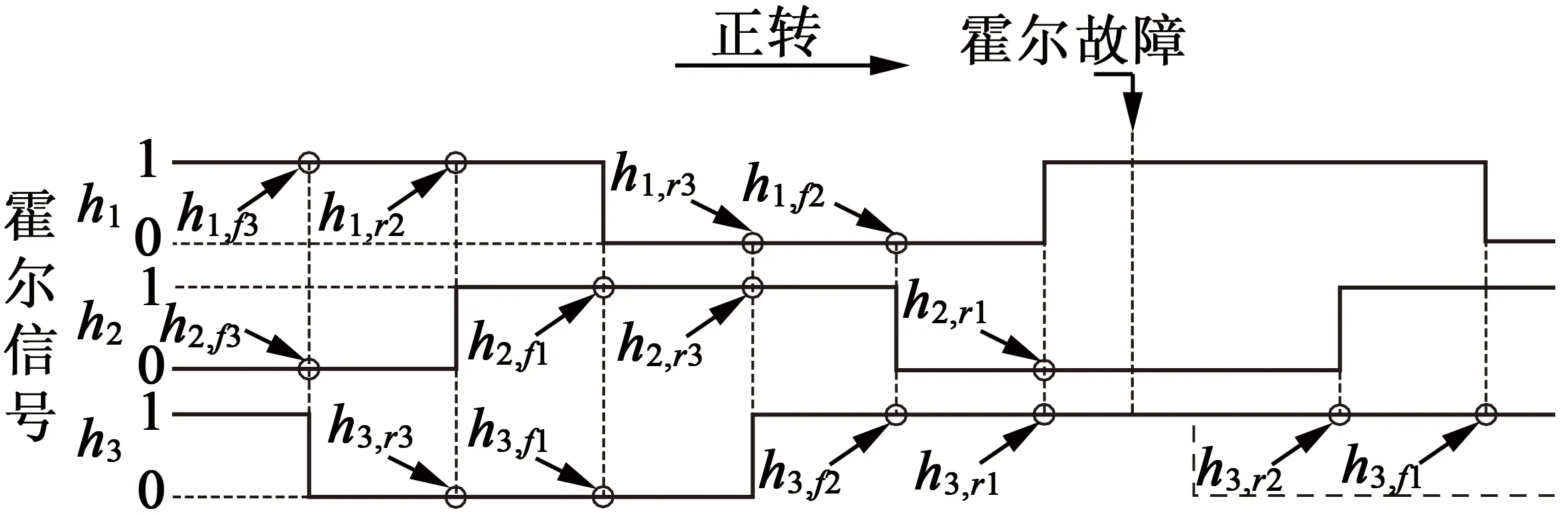
圖2 霍爾傳感器故障及其檢測

表1 霍爾傳感器的故障類型
基于轉向估計的故障檢測是當前檢測效率最高的一種方法[6]。首先定義12個變量來反映霍爾信號在各個跳變沿處的狀態,分別為h1,r2,h1,r3,h2,r1,h2,r3,h3,r1,h3,r2(在每個霍爾信號的上升沿檢測)和h1,f2,h1,f3,h2,f1,h2,f3,h3,f1,h3,f2(在每個霍爾信號的下降沿檢測),或者簡記為hx,ry和hx,fy(x,y∈{1,2,3}且x≠y)。hx,ry和hx,fy分別是霍爾信號hx在信號hy的上升沿和下降沿處的取值,具體如圖2所示。為了便于電機轉向的表述,將正轉記為“1”,反轉記為“0”,在無故障的情況下,電機的轉向可以利用任意一個變量hx,ry或hx,fy推出,如表2所示,其中dx,ry和dx,fy分別對應由變量hx,ry和hx,fy得出的方向估計[6]。
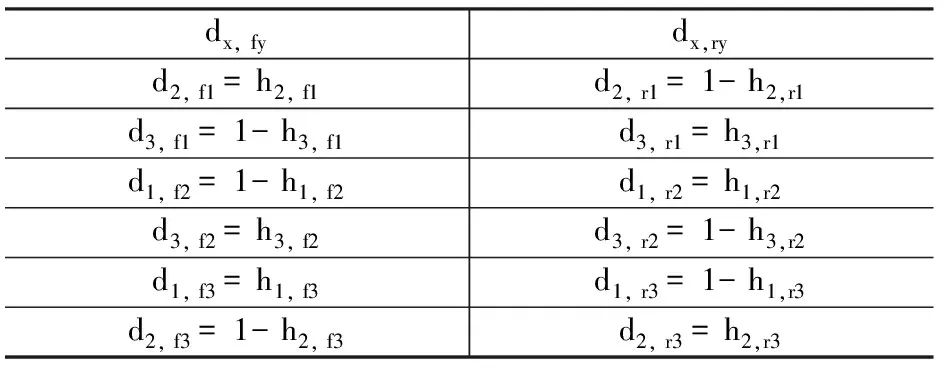
表2 轉動方向的估計
當霍爾傳感器正常工作時,由表2得到的所有轉向估計值都相等,即dx,ry=dx,fy。而當某個霍爾傳感器發生故障,相應的霍爾信號將不再變化(例如hx),檢測得到的方向信號將發生矛盾,即dx,ry≠dx,fy或|dx,ry-dx,fy|=1。如圖2所示,當故障發生后,霍爾信號h3保持在高電平,因此h3,r2=h3,f2且h3,r1=h3,f1。由表2可得|d3,r2-d3,f2|=1且|d3,r1-d3,f1|=1。因此在每個霍爾信號的跳變沿,可以通過比較不同的轉向估計值來判斷霍爾傳感器的故障情況,具體如表3所示,其中f1,f2和f3分別表示霍爾傳感器H1,H2和H3的故障情況(fx=1表示霍爾傳感器Hx發生了故障)。根據故障檢測的結果,可以利用剩余正常的霍爾信號進行轉子位置的估計,繼續為系統提供合理的位置反饋,從而實現容錯控制[6]。
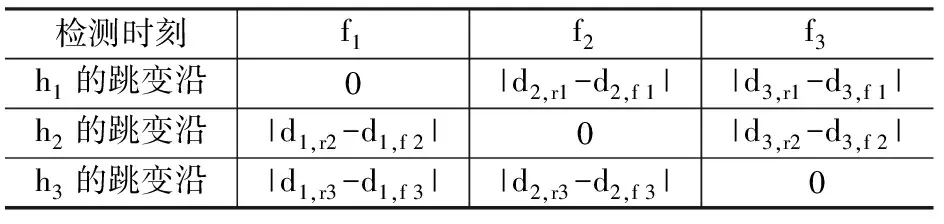
表3 霍爾傳感器的故障檢測
2 性能波動的抑制
2.1 霍爾信號的故障角

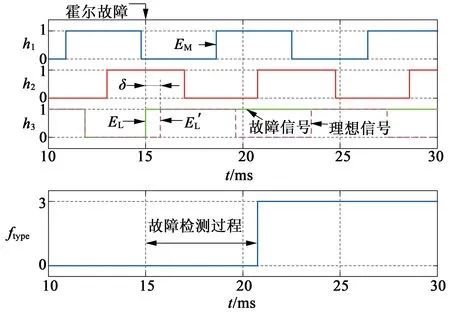
(a) 故障角δ較小
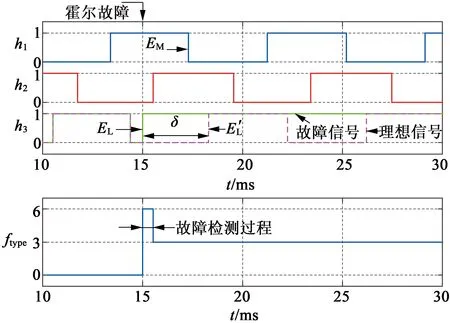
(b) 故障角δ較大
圖3 霍爾傳感器故障檢測的仿真結果
2.2 位置估計與平均
每個霍爾信號中都包含有轉子的位置信息,如式(1)~式(3)所示,因此可以利用每個霍爾信號進行獨立的轉子位置估計。如圖4所示,測試每個霍爾信號的跳變沿之間的時間Δt(也即電機轉過πrad所用的時間),然后利用式(4)~式(6)對電機的轉速和加速度進行估計。
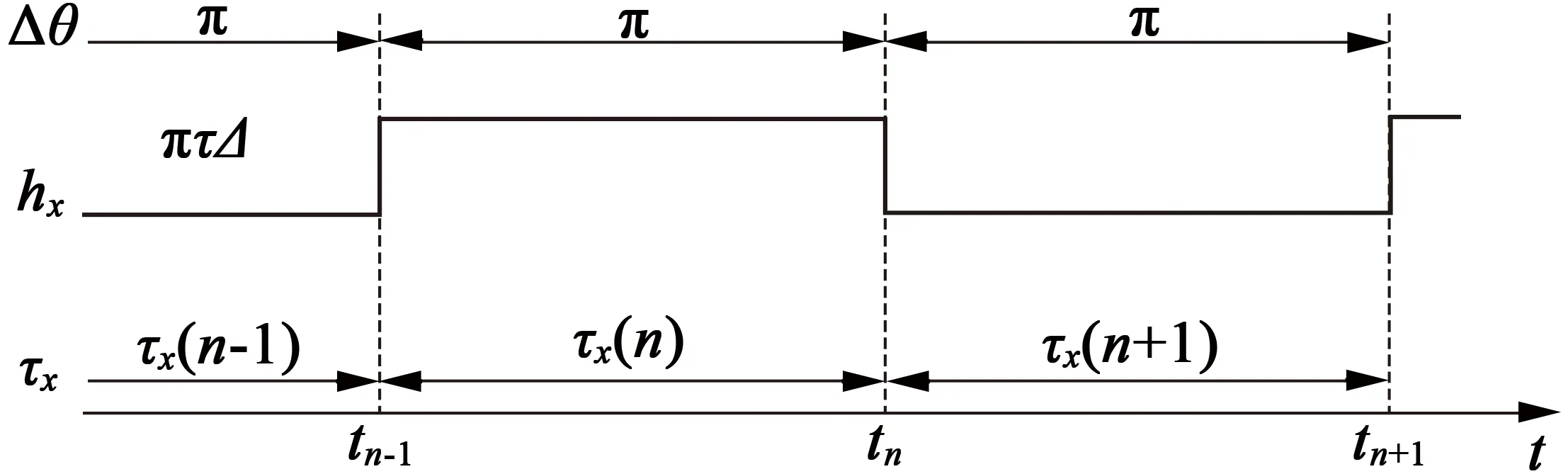
圖4 利用霍爾信號估計電機轉速和加速度
(4)
(5)
(6)
式中:x=1,2或3,用于指代任意一個霍爾信號。然后,對每個估計轉速進行積分運算,就可以估算出每個霍爾信號對應的轉角,如下:
(7)
考慮到霍爾傳感器的安裝誤差,估算角度與實際轉子位置的關系可以近似表示:
(8)
然后對三個估計角度求平均可得:
(9)
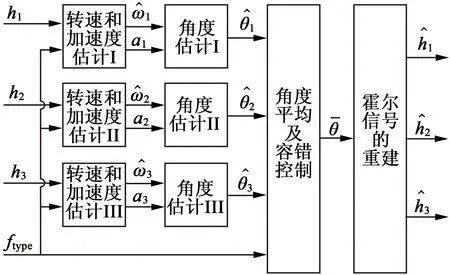
圖5 霍爾誤差角和故障角的抑制以及容錯控制
當一個霍爾傳感器Hx發生故障時,錯誤的跳變沿引入了故障角δ,則對應的估計角度:
(10)
在故障檢測完成之前,利用角度平均法,可以得到平均角度:
這時,故障角對換相的影響變為原來的1/3。
當故障完成檢測后,舍棄故障信號對應的角度估計,重新進行角度平均值計算,從而完成容錯控制。例如,霍爾傳感器H3發生故障,故障檢測完成后,平均角度的計算變:
(12)
當第二個霍爾信號故障發生(假設故障的傳感器為H2)時,帶來的角度誤差記為δ′,這時平均角度:
(13)
這樣,誤差角對平均角度的影響減小為1/2。當第二次霍爾故障檢測完成后,利用剩余的角度估計如式(14)所示,使電機繼續運行,完成容錯控制。
(14)
2.3 較大誤差角的消除
當故障角度較大時,如圖3(b)所示,即使使用角度的平均法,誤差角度仍然會對電機的正確換相產生十分不利的影響,這就需要采取特殊的策略。如圖3(b)所示,較大的誤差角使得故障檢測結果立即發生變化,但是直到檢測過程結束,才能得知真正的故障類型。因此這種情況下,故障的發生可以通過故障檢測結果ftype的改變來指示(ftype(n-1)≠ftype(n)),這個時刻的霍爾跳變提供了錯誤的位置信息,對應的轉速計算也是錯誤的,在角度估計中將其舍棄,繼續使用之前計算的速度和加速度進行角度估計。當檢測結果不再發生變化時(ftype(n-1)=ftype(n)),故障檢測已經完成,這時再根據故障檢測結果,選取正常霍爾信號,通過角度估計和平均提供轉子位置反饋,完成容錯控制。這樣就完全避免了故障角δ對角度估計的影響,可以極大地減小電機的性能波動。
3 實驗結果分析
本文所用無刷直流電動機參數如表4所示,負載轉矩為1 N·m,加載器轉動慣量為1.2×10-4N·m·s2,霍爾信號、電流及轉速信息通過基于LabVIEW的數據采集平臺進行測試和記錄。三個開關串聯在霍爾傳感器的連接線中,通過控制開關的開合來模擬霍爾傳感器的故障。故障檢測和容錯控制在一個基于dsPIC30F2020的硬件電路中實現,該硬件電路連接在霍爾傳感器和驅動器之間。實驗中,針對各種故障情況,對無波動抑制的容錯控制和基于波動抑制方法的容錯控制都進行了測試和比較。
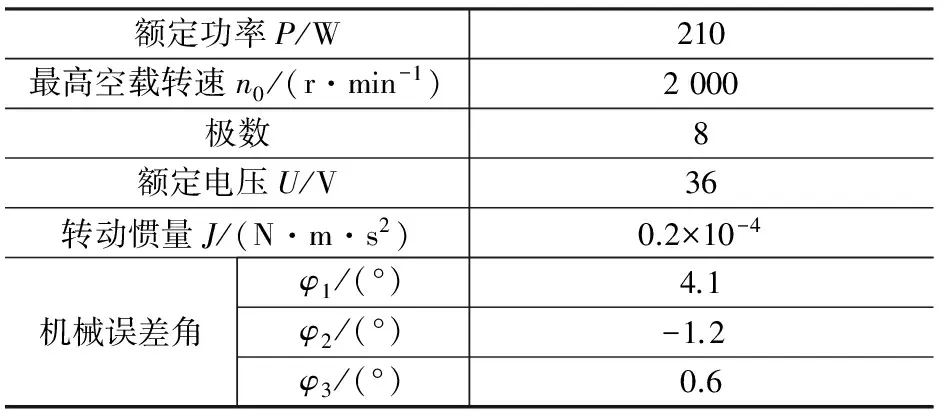
表4 無刷直流電動機參數
圖6為霍爾信號完全正常的情況下,角度估計與平均法的實驗結果,其中角度估計和平均法在t=70 ms處使能。可以看出,當直接利用霍爾信號控制電機換相時,霍爾傳感器的安裝誤差導致電機三相電路不對稱,且電流中有明顯的尖峰。當角度估計與平均法使能之后,電機三相繞的換相時刻分布更加均勻,三相電流的對稱度明顯提高。
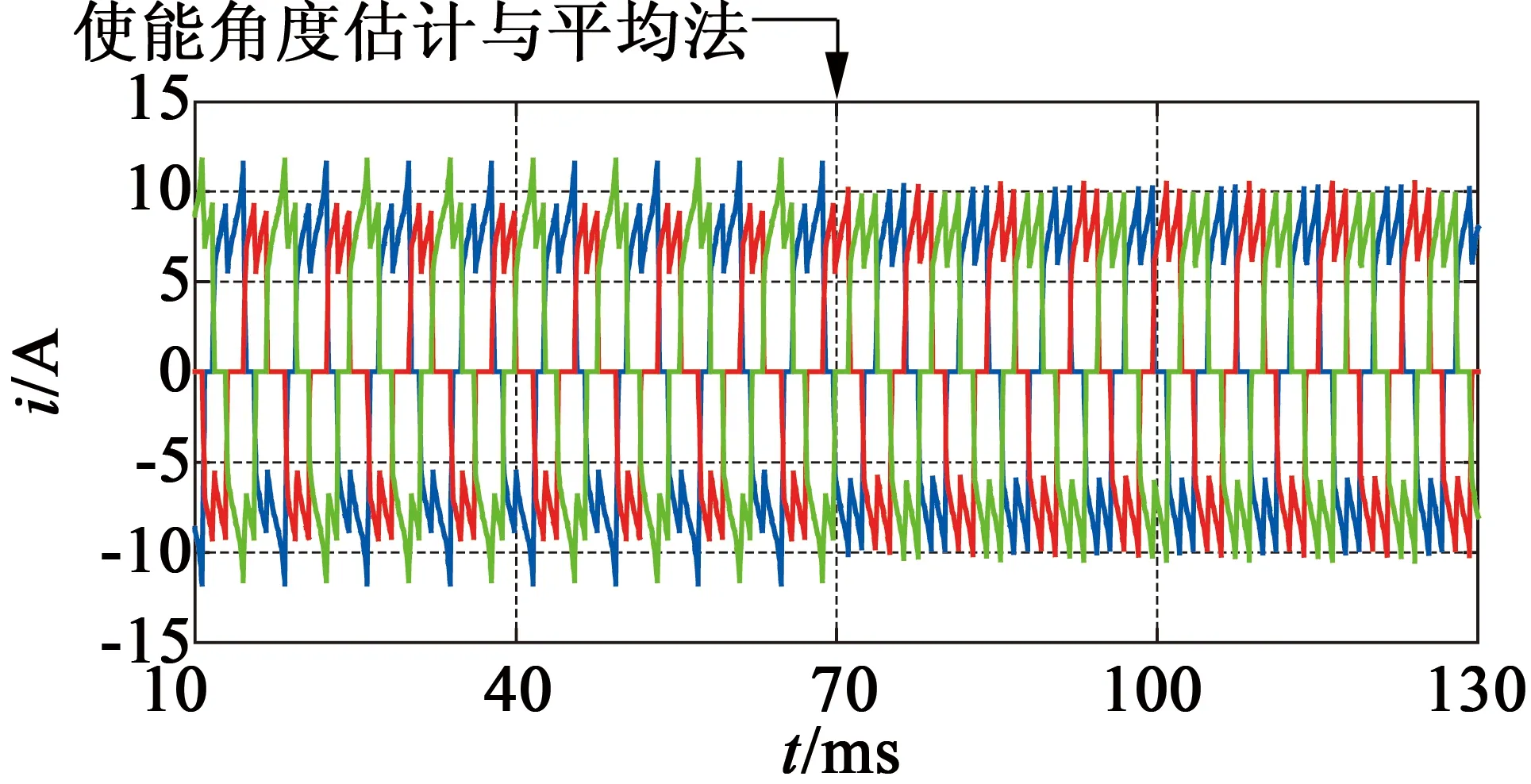
圖6 霍爾安裝誤差的抑制
圖7和圖8為單個霍爾發生故障的實驗結果,圖7中故障角較小,而圖8中故障角度較大。圖7中故障發生在t=20 ms處,在原有容錯控制方法中,電流出現了30 A的尖峰,轉速出現了60 r/min的波動。而當使用波動抑制方法時,電流和轉速都只出現了很小的波動。圖8為故障角較大的情況,故障發生在t=20 ms處,在常規容錯控制中,電流的尖峰達到了20 A,轉速波動為48 r/min。而當使用波動抑制的容錯控制時,電流和轉速幾乎沒有波動。
(a) 霍爾信號
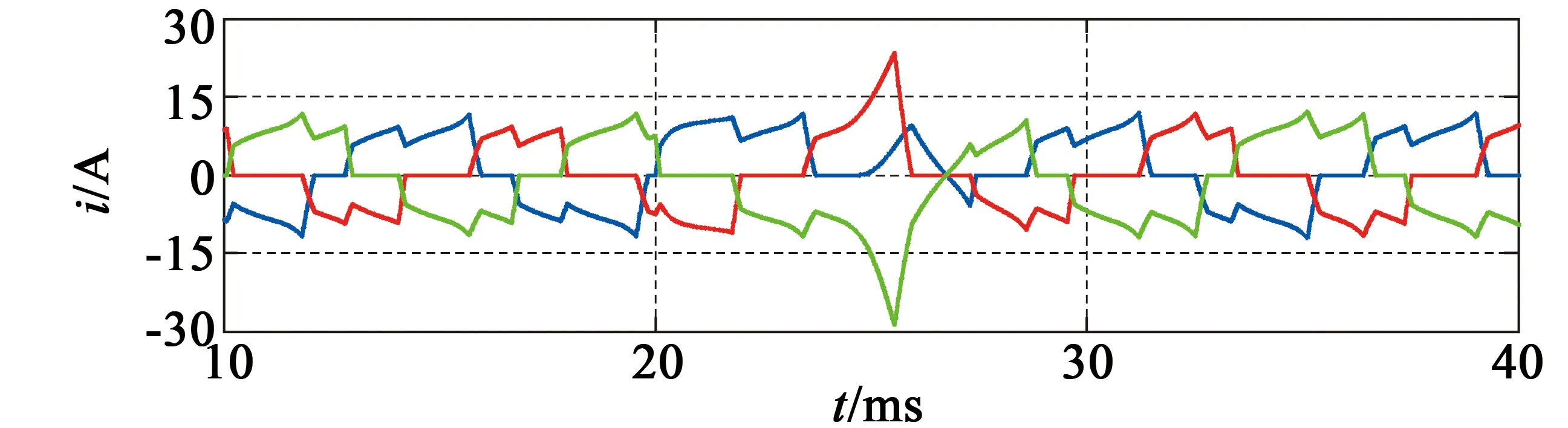
(b) 無波動抑制

(c) 波動抑制
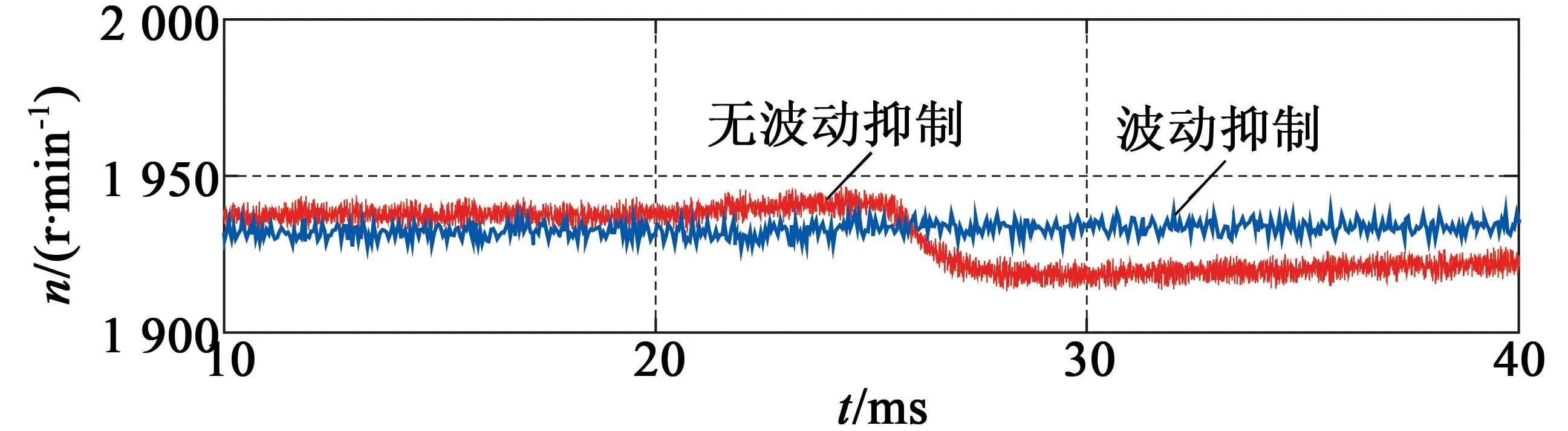
(d) 轉速
(a) 霍爾信號
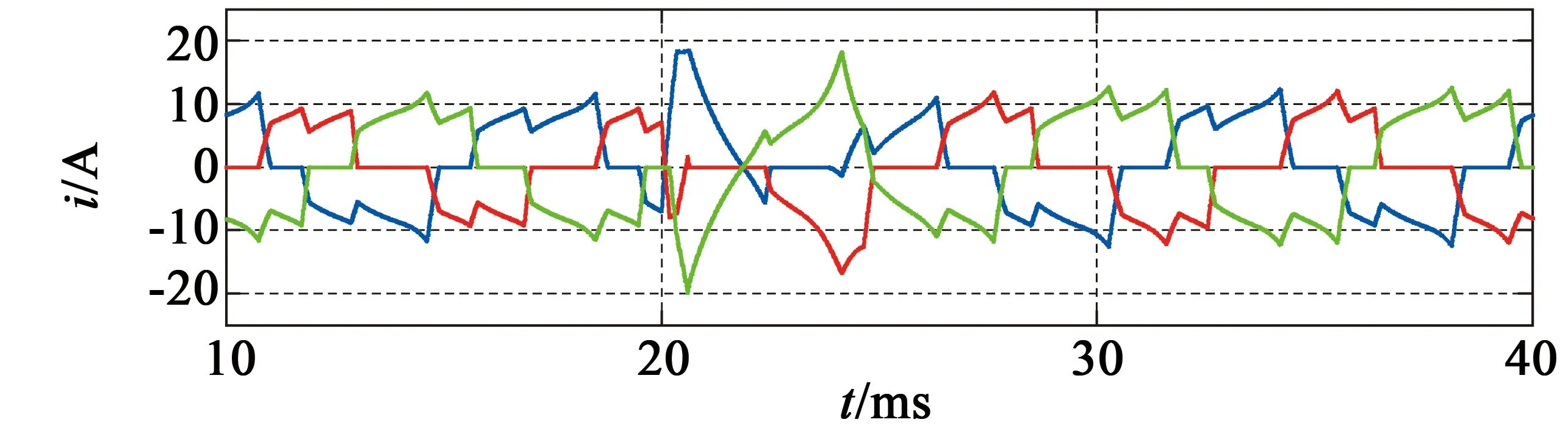
(b) 無波動抑制
(c) 波動抑制
(d) 轉速
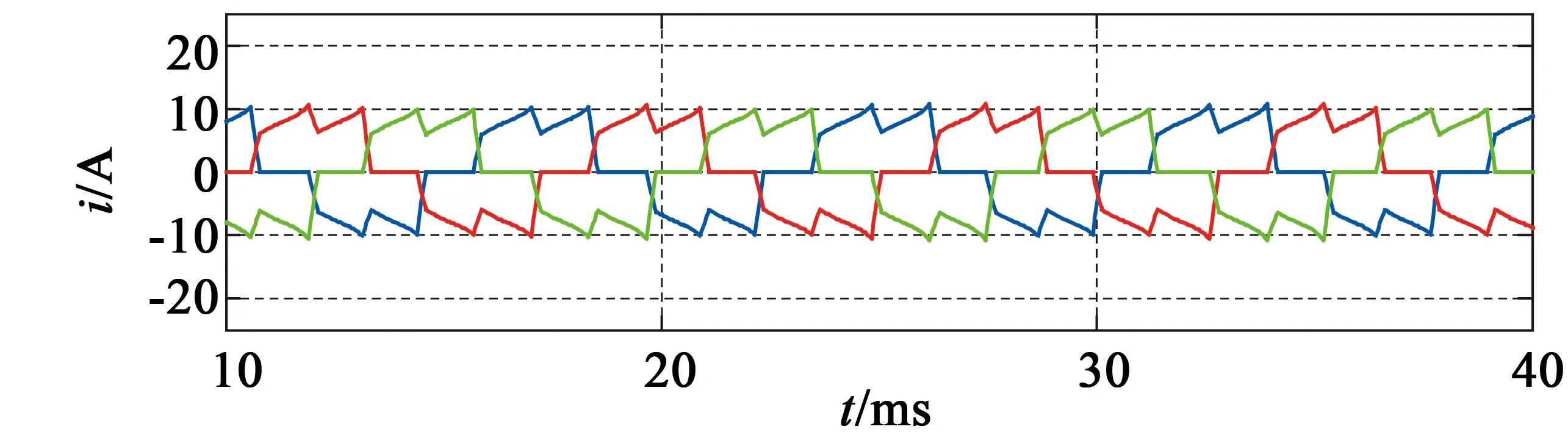
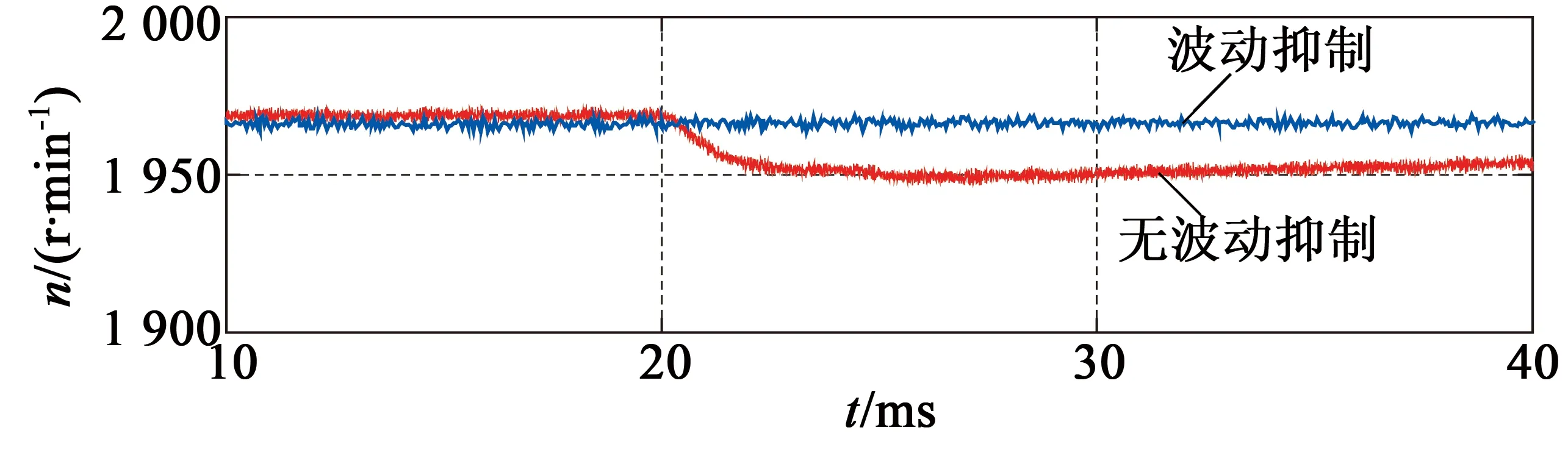
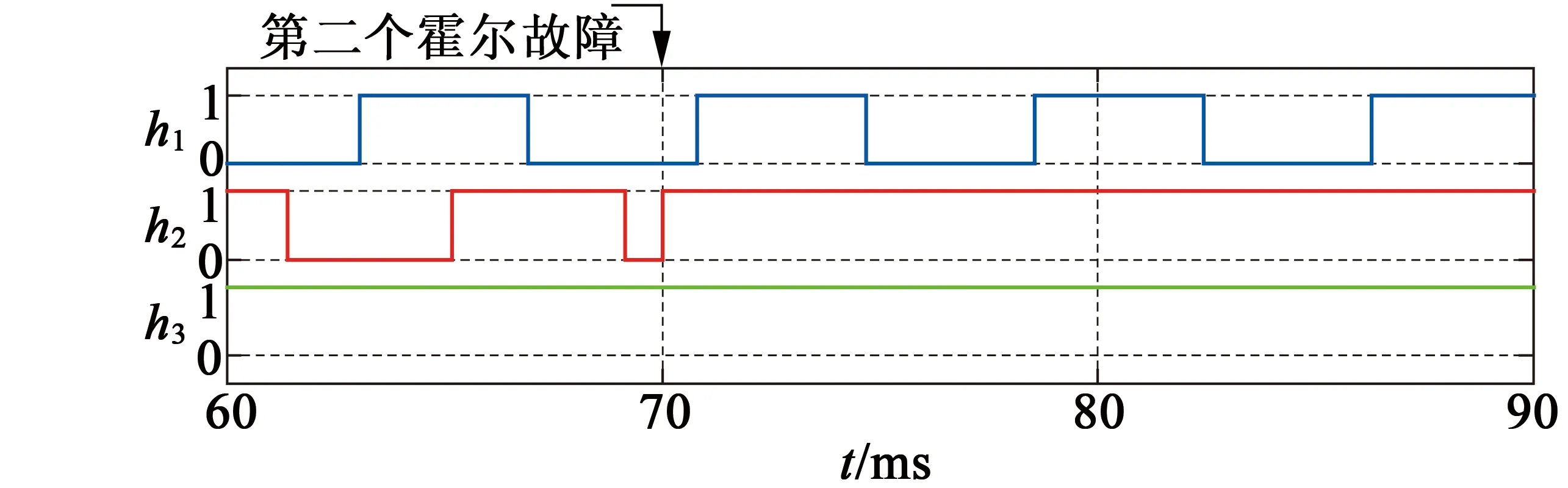
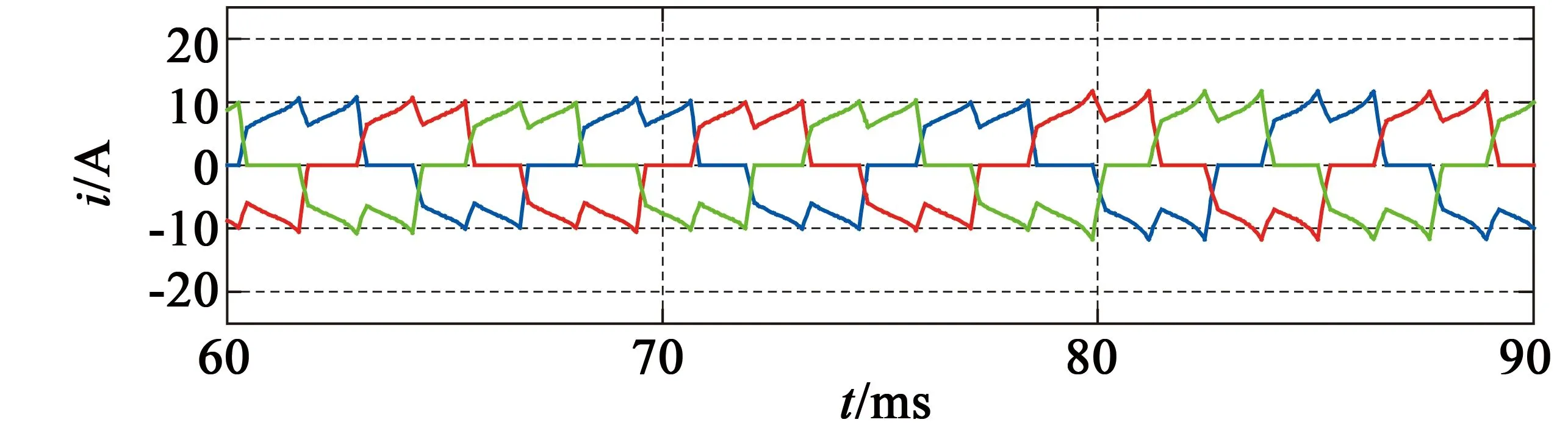
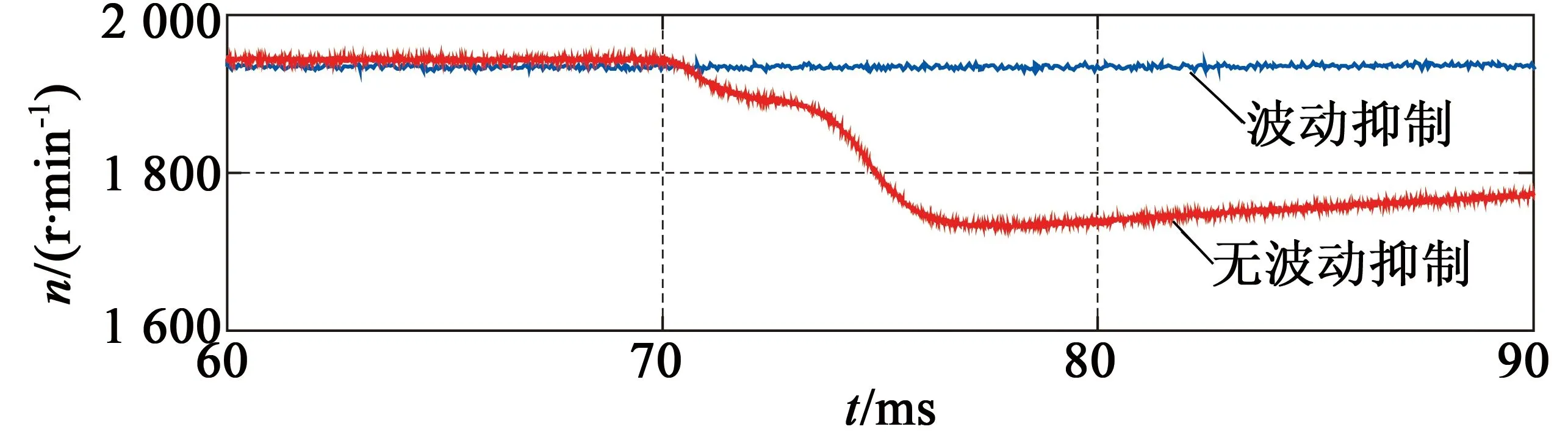
圖9和圖10為兩個霍爾發生故障的實驗結果,其中圖9為故障角較小的情況,圖10為故障角較大的故障情況。圖9中,故障發生在t=70 ms,對于無波動抑制的容錯控制,故障引起了極大的異常電流,峰值達到了75 A,而轉速波動高達100 r/min。當采用波動抑制方法時,電流只增加了3 A,轉速波動只有14 r/min,波動得到了明顯的抑制。較大的故障角如圖10所示,在無波動抑制的情況下,電機電流出現了高達75 A的尖峰,轉速出現了110 r/min的波動。而當采用提出的波動抑制方法時,轉速和電流都幾乎沒有發生波動,平穩地實現了容錯控制。
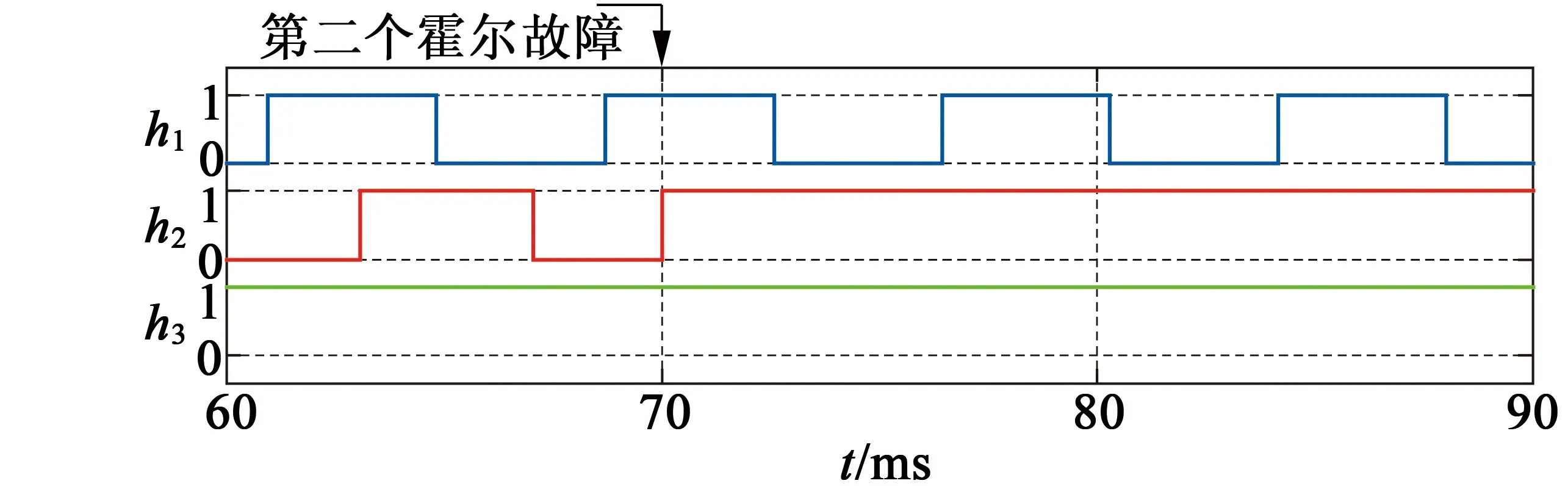
(a) 霍爾信號
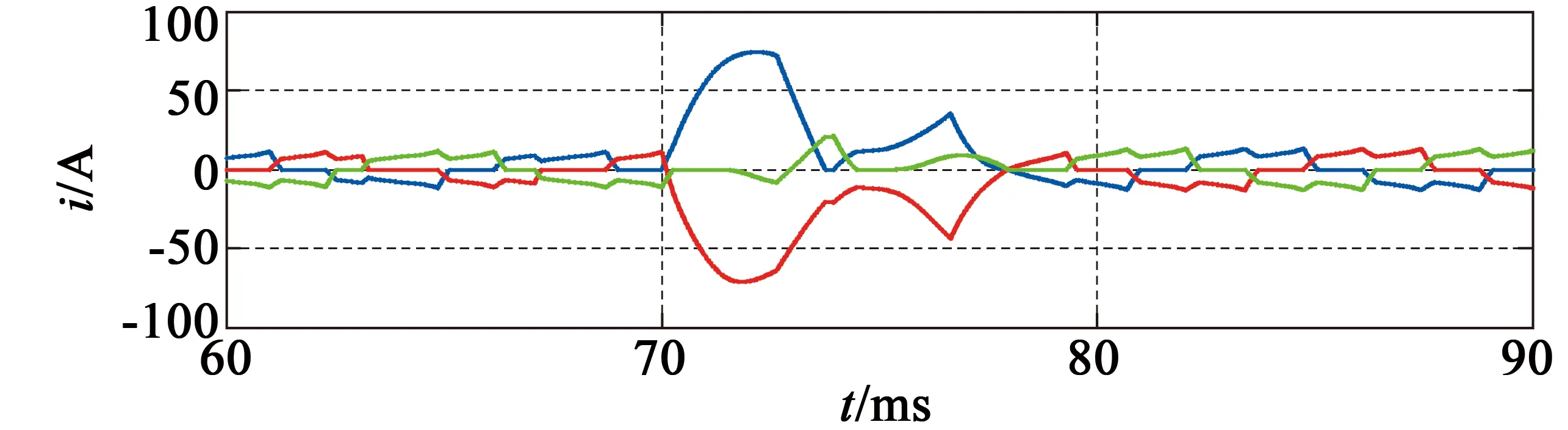
(b) 無波動抑制
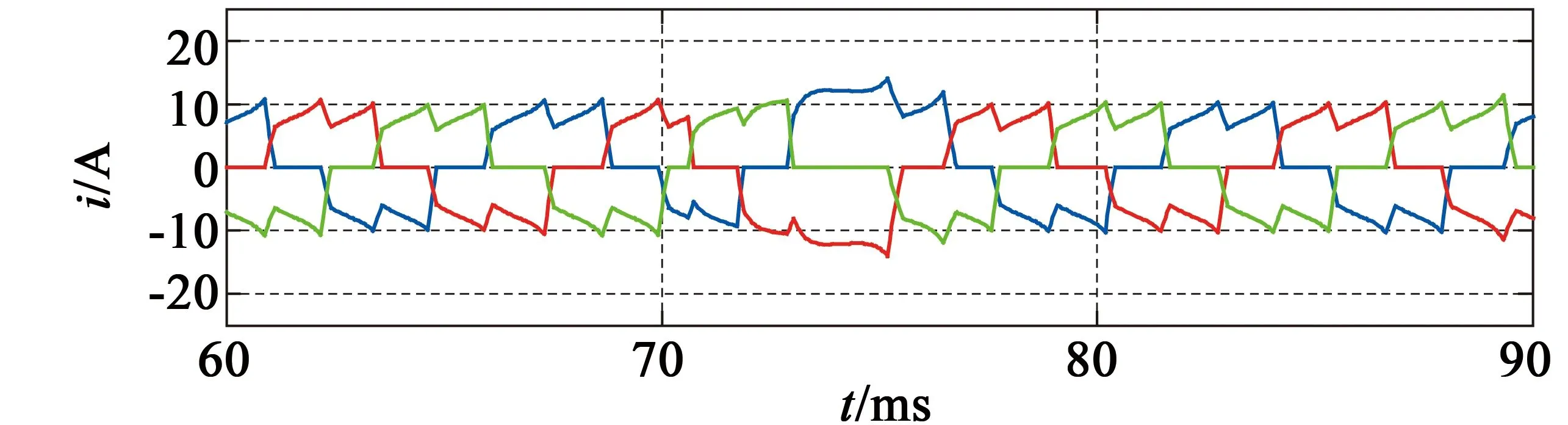
(c) 波動抑制
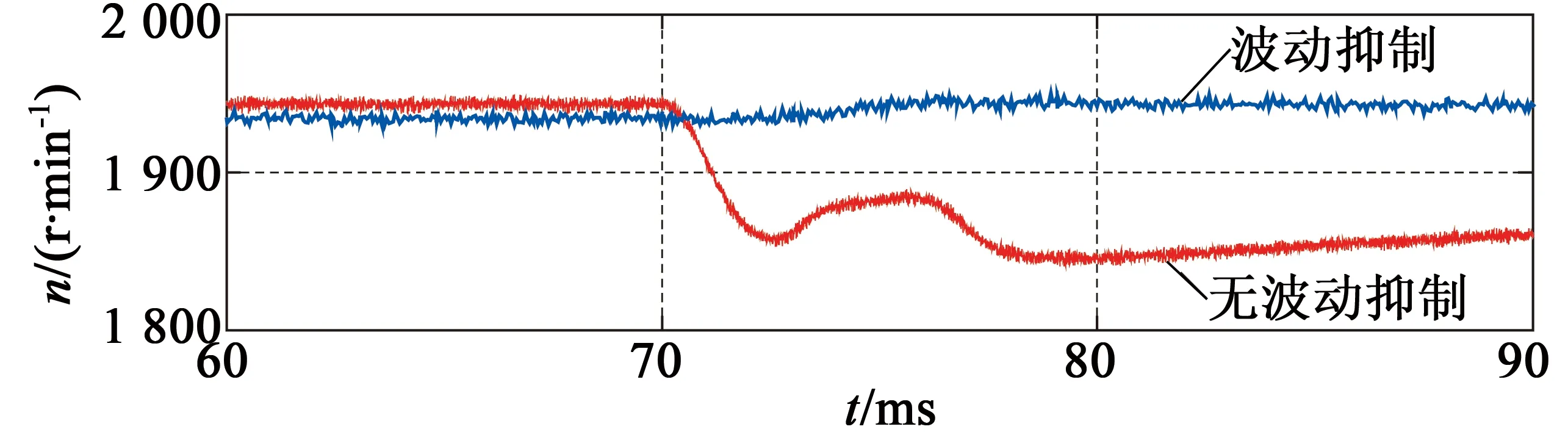
(d) 轉速
(a) 霍爾信號

(b) 無波動抑制
(c) 波動抑制
(d) 轉速
由以上實驗結果可知,所提出的波動抑制方法,能夠抑制由霍爾傳感器安裝誤差引起的電流不對稱,也能夠明顯地抑制容錯控制中的電流和轉速波動,從而提高了系統的容錯控制效果。
4 結 語
本文在無刷直流電動機容錯控制的基礎上,對霍爾傳感器安裝誤差和故障引起的電流和轉速波動展開研究,提出了轉角估計與平均的方法,實現了容錯控制中性能波動的抑制。實驗結果表明,轉角估計與平均法能夠有效地消除霍爾傳感器安裝誤差帶來的電流不對稱,而且能夠明顯地抑制霍爾傳感器故障所帶來的異常電流和轉速波動,從而使無刷直流電動機的容錯控制性能得到了極大的提高。
[1] 林海,嚴衛生,李宏.無刷直流電動機驅動控制容錯方案研究[J].西安交通大學學報,2009 ,43(2):53-57.
[2] 王強,王友仁,張子富,等.無刷直流電動機驅動系統逆變器的開路故障診斷[J].中國電機工程學報,2013,33(24):114-120.
[3] YU-SEOK J,SEUNG-KI S,STEVEN E S,et al.Fault detection and fault-tolerant control of interior permanent-magnet motor drive system for electric vehicle[J]. IEEE Transactions on Industry Applications, 2005, 41(1): 46-51.
[4] TASHAKORI A,EKTESABI M.A simple fault tolerant control system for Hall effect sensors failure of BLDC motor[C]//8th IEEE Conference on Industrial Electronics and Applications.IEEE,2013:1011-1016.
[5] GIACOMO S,GIULIO D D,GIUSEPPE S,et al.Fault-tolerant rotor position and velocity estimation using binary Hall-effect sensors for low-cost vector control drives[J].IEEE Transactions on Industry Applications,2014,50(5):3403-3413.
[6] DONG L,JATSKEVICH J,HUANG Y,et al.Fault diagnosis and signal reconstruction of hall sensors in brushless permanent magnet motor drives[J].IEEE Transactions on Energy Conversion,2015,31(1):118-131.
[7] POOYA A,SINA C,JURI J.Evaluating misalignment of hall sensors in brushless DC motors[C]//2008 IEEE Electric Power & Energy Conference.IEEE,2008:1-6.
Suppression of Performance Fluctuation in Fault Tolerant Control of Brushless DC Motor
DONGLiang-hui,LIUJing-Lin
(Northwestern Polytechnical University, Xi'an 710072, China)
The brushless DC motor drives can recover from Hall sensor faults under the fault tolerant control. However, abnormal transient currents and speed fluctuation emerge during the fault diagnosis process due to the fault angle brought by the faulty signal. In adddition, the installation errors of Hall sensors also result in unbalanced currents and low-frequnecy torque fluctuation. In this paper, position estimations and averaging methods were proposed to reduce the influence of error and fault angles on the commutation timings. For significant fault angles, the fault diagnosis process was notified by the variation of fault diagnosis results, during which the fault angle was eliminated and the rotor position was estimated based on the history data. The experimental results demonstrate that the currents can be balanced and the fluctuation in currents and speed can be suppressed by the proposed methods.
brushless DC motor (BLDCM); fault tolerant control; fluctuation suppression; transient currents; speed fluctuation; position error
2015-11-07
TM33
A
1004-7018(2016)05-0001-05
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
