感應電動機無速度傳感器矢量控制優化算法
2016-05-25 00:37:35江金魚楊春杰
微特電機 2016年5期
江金魚,黃 磊,楊春杰
(湖北理工學院,黃石 435003)
感應電動機無速度傳感器矢量控制優化算法
江金魚,黃 磊,楊春杰
(湖北理工學院,黃石 435003)
電動汽車無速度傳感器矢量控制需要估計電機轉速,利用電壓模型估計轉速用到的電機參數少,算法簡單,但由于純積分環節的存在,會導致積分輸出漂移和飽和。常規的抑制辦法是采用濾波器,但會帶來較大的幅值與相位誤差,影響速度觀測精度甚至導致系統失穩。為了解決因純積分導致的問題,提出了一種改進的電壓模型轉速估計算法,該算法不含濾波器,而是利用定子側反電勢獲得同步轉速進而估算電機轉速,避開了電機電流的微分運算以免放大檢測噪聲,不需要預測下一拍電流,算法簡單有效,易于實現。最后實驗驗證了所提方法的正確性和有效性。
感應電動機;電壓模型;轉速估計;矢量控制
0 引 言
基于能源與環境問題的考慮,電動汽車逐漸成為當前的研究熱點。感應電動機因其結構簡單、可靠性高、價格低廉及易維護等優點在電動汽車領域獲得了廣泛應用[1-2]。
感應電動機矢量控制通常需要在電機上安裝速度傳感器檢測轉速,這會提高成本,增加系統的尺寸和復雜度,并使系統的可靠性降低,而采用無速度傳感器技術,即利用檢測電機的其它變量來觀測(估計)電機的轉速以替代轉速傳感器將是一種不錯的解決方案。速度估計方法主要有狀態觀測器法、模型參考自適應法、電機電壓或電流模型法等。前兩類方法比較復雜,難以實際應用,而電壓模型法算法簡單,涉及到的電機參數少,但由于算法中含有純積分運算,積分初值和積分零漂會導致積分輸出漂移和飽和現象,影響速度觀測精度甚至導致系統失穩。解決的方法有低通濾波器法、低通加高通濾波器法、閉環反饋法等,但會帶來相位及幅值誤差[3-5]。文獻[6]給出了一種基于轉子反電動勢的同步轉速估計方法,能夠有效抑制積分漂移和飽和,但是需要用到電機總漏感和電機電流的微分項,前者的誤差會影響估算同步轉速的準確性,后者受電流的采樣誤差影響甚至會放大電流采樣噪聲;同時,在數字化實現微分時需要估計下一拍的電流值帶來進一步的誤差。本文在此基礎上,提出了一種改進的方案,利用定子側反電動勢估計同步轉速,基于間接矢量控制獲得轉差速度進而估計出電機實際轉速。同步轉速估計不需要用到電感和總漏感,也不需要計算電流的微分。所提方法簡單有效,易于實際應用,可用于電動汽車的感應電動機驅動系統,以滿足高功率密度、高可靠性和高性能的要求。
1 新型無速度傳感器矢量控制系統
1.1 新型速度估計算法
同步旋轉參考坐標系下電機電壓方程:
(1)
式中:usd,usq,isd,isq,ψsd,ψsq分別為旋轉坐標系下定子電壓、定子電流和定子磁鏈。
當參考坐標系指向定子磁鏈時,則ψsq=0,pψsq=0,式(1)可化為:
(2)
式中:esd,esq為定子側反電動勢。
由式(2)可得同步轉速:
(3)
則電機轉速的估計值可由如下公式獲得:
(4)
由式(3)和式(4),新型速度估計算法如圖1所示。注意:式(1)~式(3)中的電壓、電流和磁鏈的d,q分量是在定子磁鏈定向旋轉坐標系下計算的,僅用于電機轉速的估計;下文中的間接矢量控制系統中的電壓、電流d,q分量在轉子磁鏈定向坐標系下計算。
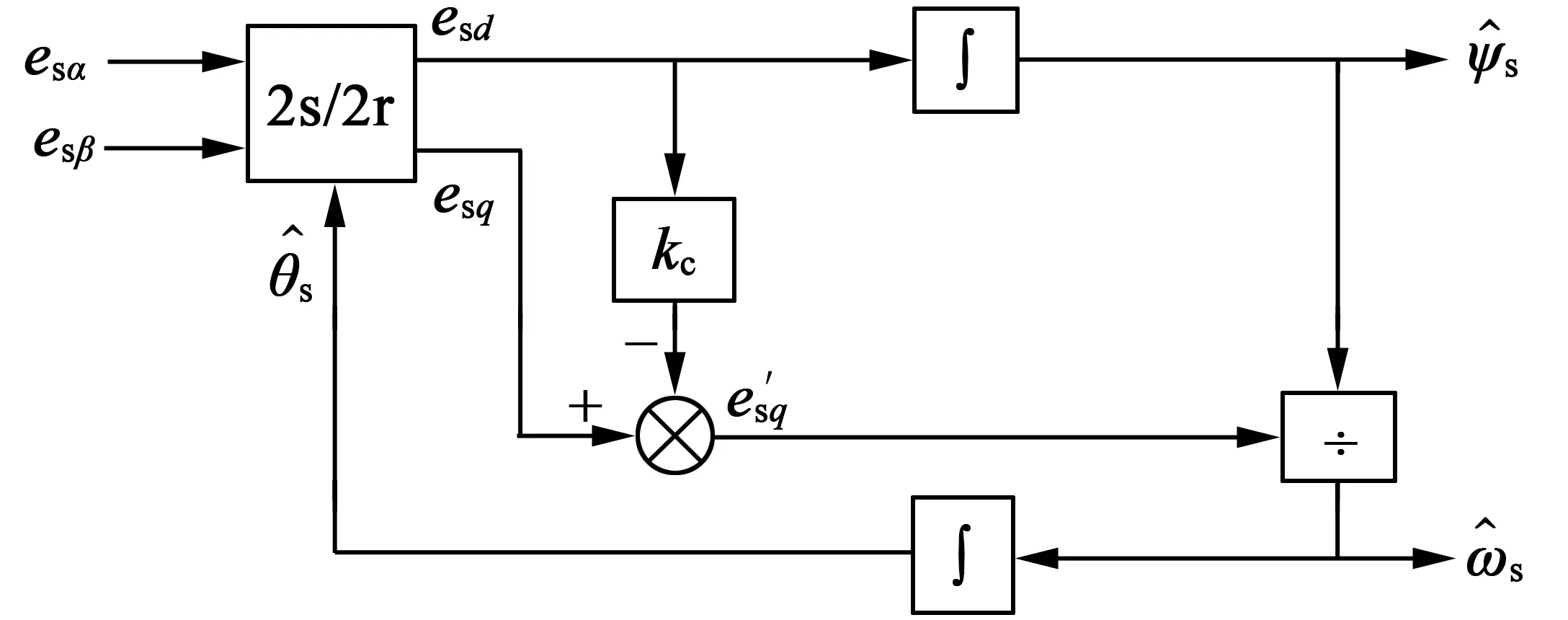
圖1 新型速度估計算法原理圖

由式(2)~式(4)及圖1可知,新型速度估計算法與傳統轉速估計方法[3,6]不同,所提算法典型特征是不需要濾波器,分別在定子磁場定向坐標系和轉子磁場定向坐標系估算同步轉速及電機轉速。這樣做的好處:一是同步轉速的估計僅受定子電阻影響;二是不需要電流微分及預測下一拍。即在定子磁鏈定向旋轉坐標系計算定子反電動勢以獲得準確的同步轉速,再利用轉子磁場定向坐標系估算出電機轉速,降低電機參數對轉速觀測的影響。
1.2 無速度傳感器矢量控制系統
根據定、轉子磁鏈關系:
(5)
可得轉子磁鏈定向角度:
(6)
式中:θe為轉子磁鏈與定子磁鏈的夾角。
根據式(3)、式(4)和式(6),即可構建電流內環加轉速外環的間接矢量控制系統,其中電機轉速是估計值而非檢測值。該無速度傳感器矢量控制系統框圖如圖2所示。
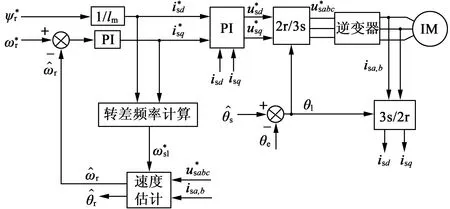
圖2 無速度傳感器矢量控制系統框圖
1.3 速度估計誤差分析
由式(3)和式(4)可以看出,速度估計算法受轉子時間常數、定子電阻影響,還受電機端電壓影響,通常用電壓指令值代替實際檢測值,因此要考慮逆變器死區效應和數字PWM延時的影響。對于死區和延時的影響,在后面的實驗中進行了補償。轉子時間常數的變化雖然也影響轉速估算的精確度,但由于其只影響轉差頻率,其值比較小,引起的轉速誤差也較小。由式(3)知,定子電阻影響同步轉速的估算,速度越低時影響越大,甚至失去穩定。一種辦法是在極低速區段,采用轉速開環工作模式[6],簡單實用,實現成本與效益的平衡。
2 實驗結果
為驗證所提無速度傳感器矢量控制方案的有效性,搭建了3kW樣機進行了實驗驗證,實驗樣機如圖3所示。基于數字信號處理器控制三相電壓源型逆變器驅動三相感應電動機,感應電動機與
圖3 實驗裝置圖 一臺直流發電機同軸,直流發電機接電阻作為感應電動機的負載,實際轉速信號由光電編碼器獲得。相應的主電路參數、感應電動機和控制器參數如表1所示。
實驗過程如下:先由電機空載起動加速到額定轉速,然后在5 s時突加負載,穩定運行4 s后再去掉負載,考察轉速估計算法和無速度傳感器矢量控制的性能。
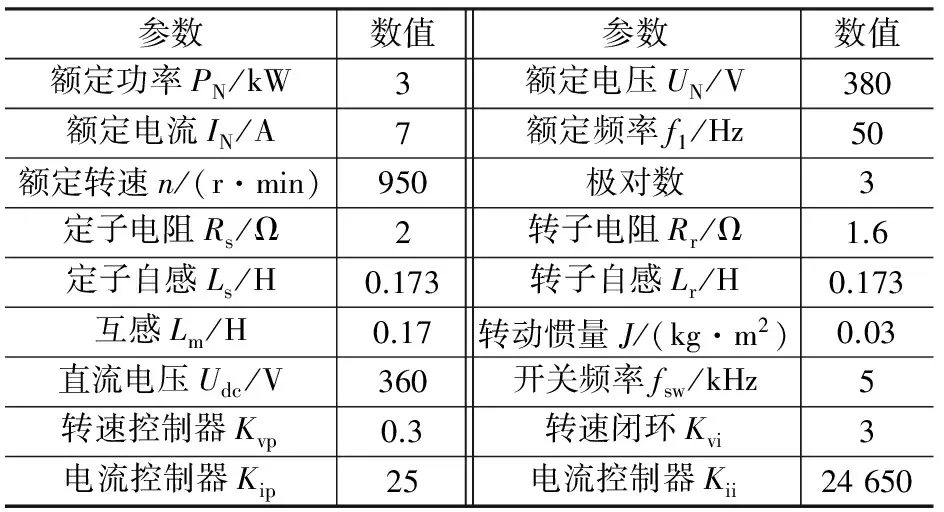
表1 實驗參數
圖4(a)給出了空載起動的轉速估計,電機空載起動然后加速到額定轉速950 r/min。由圖4(a)可見,估計轉速能很好地跟蹤實際轉速。
圖4(b)、圖4(c)給出了負載突變時的轉速估計和電機d,q軸電流的波形。在5 s時由空載突加80%額定負載,在9 s時去掉負載。由圖4可見,估計轉速能較好地跟蹤實際轉速,有一定的動態誤差,但是由電機電流波形可以看出,d,q軸無耦合,動態性能良好。
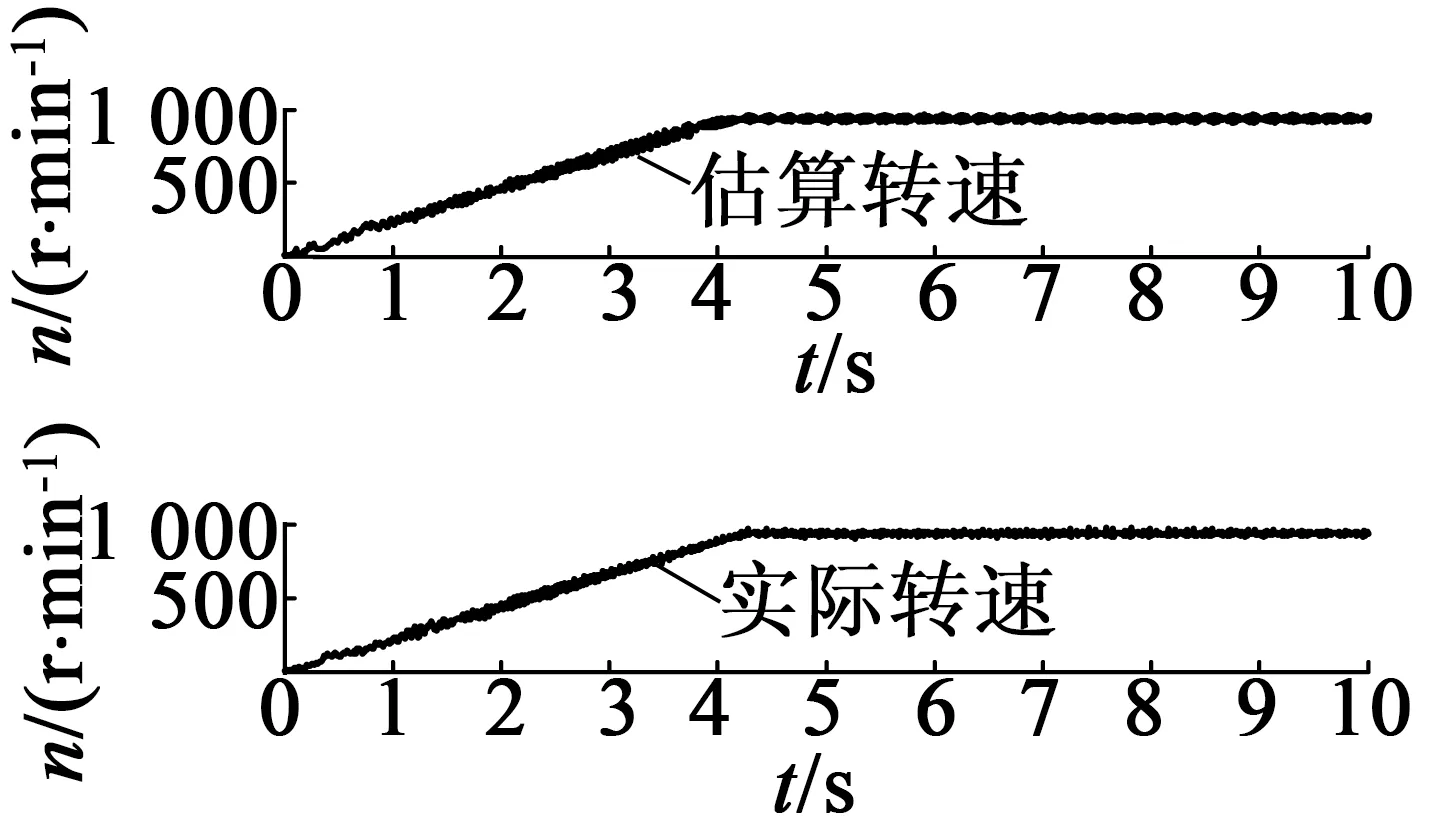
(a) 空載起動轉速波形
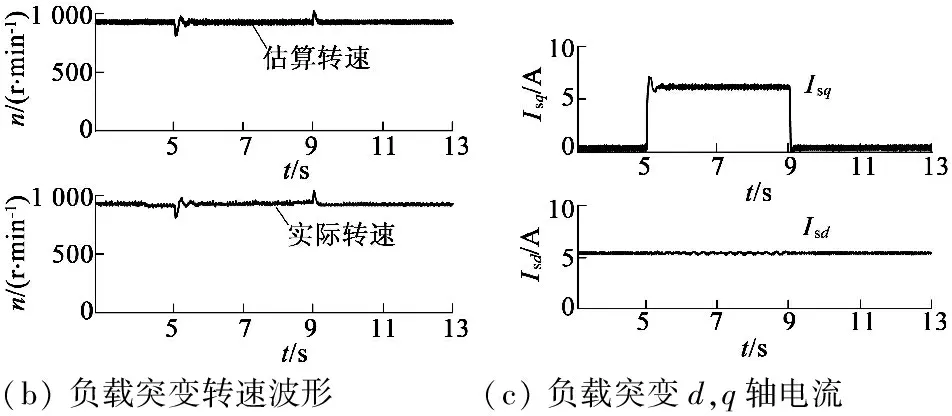
(b)負載突變轉速波形(c)負載突變d,q軸電流
圖4 實驗結果
實驗結果說明,在穩態和動態過程中,估計轉速都能很好地跟蹤實際轉速,實現無速度傳感器矢量控制。
3 結 語
本文提出了一種用于電動汽車的感應電機無速度傳感器矢量控制的簡化算法,算法根據電機電壓模型,利用定子側反電勢獲得同步轉速進而估算電機轉速,避開了電機電流的微分運算以免放大檢測噪聲,不需要預測下一拍電流。分析與實驗結果表明,不含濾波器但純積分環節的漂移和飽和仍被有效抑制,在穩態和動態過程中,都能實現很好地轉速估計,無速度傳感器矢量控制工作良好。同時,該算法簡單易于實現,應用于電動汽車會大大降低系統成本。
[1] 劉和平,譚天誠,郭強.一種電動汽車用異步電機控制策略[J].電力電子技術,2013,47(9):72-74.
[2] 王曉遠,高 鵬,趙玉雙.電動汽車用高功率密度電機關鍵技術[J].電工技術學報,2015,30(6):53-59.
[3] 朱緋,盧子廣,胡立坤,等.采用自適應滑模速度觀測器電動汽車驅動控制[J].電力電子技術,2015,49(1):57-59.
[4] 朱曉榮.電動車交流異步電機無速度傳感器矢量控制系統[D].天津:天津大學,2009.
[5] SHIN M H,HYUN D S,CHO S B,et al.An Improved Stator Flux Estimation for Speed Sensorless Stator Flux Orientation Control of Induxtion Motors[J].IEEE Transactions on Power Electronics,2000,15(2):312-318.
[6] 馬小亮.高性能變頻調速及其典型控制系統[M].北京:機械工業出版社,2010.
A Simplified Speed Sensorless Vector Control Method of Induction Motor for Electric Vehicles
JIANGJin-yu,HUANGLei,YANGChun-jie
(Hubei Polytechnic Universiy,Huangshi 435003,China)
In the speed sensorless vector control of induction motor for electric vehicles, a speed estimator is very important. Conventional voltage model-based method is simple, but there are errors in this method caused by the DC drift and initial value problems of the pure integration. When the low-pass filter is adopted to overcome this problem, amplitude and phase errors are introduced and this will degrade the accuracy of the speed estimation. To overcome this pure integration problem, a modified voltage model-based method without low-pass filter was proposed in this paper. The speed estimation was based on the back EMF of stator winding with no need of differential operation of the stator currents, which may cause noise amplification. The proposed method is simple, effective and easy to implementation. Experimental results verify its feasibility.
induction motor; voltage model; speed estimator; vector control
2015-09-30
湖北省自然科學基金項目(2014CFB177)
TM346
A
1004-7018(2016)05-0075-02
