基于PCNN與形態學的坑洞圖像邊緣提取
2016-05-25 00:37:00粟周瑜蘭全祥曹建秋
重慶交通大學學報(自然科學版) 2016年1期
粟周瑜,蘭全祥,袁 泉,曹建秋
(1.貴州省公路局,貴州 貴陽 550003;2.重慶交通大學 信息科學與工程學院,重慶 400074)
基于PCNN與形態學的坑洞圖像邊緣提取
粟周瑜1,蘭全祥2,袁 泉1,曹建秋2
(1.貴州省公路局,貴州 貴陽 550003;2.重慶交通大學 信息科學與工程學院,重慶 400074)
對坑洞圖像邊緣提取進行了研究,改進了脈沖耦合神經網絡模型,提出了一種PCNN和形態學相結合的邊緣提取方法。對基本PCNN模型進行優化,簡化了原模型參數,并改進了原模型的線性輸入項和脈沖輸出計算方法。在圖像邊緣提取過程中,先對圖像進行增強,在一定程度上消除坑洞周圍環境對坑洞邊緣的影響,再利用改進的PCNN模型和形態學的膨脹腐蝕特性對其進行邊緣提取。實驗結果表明:該方法對路面坑洞圖像的邊緣提取比傳統邊緣提取算法更為有效,抗干擾能力強,能有效地抑制路面環境對坑洞邊緣的影響,所提取到的邊緣更加清晰、可用。
道路工程;PCNN;形態學;坑洞;邊緣
0 引 言
PCNN是根據對動物的大腦視覺皮層神經元脈沖串同步振蕩現象的研究結果[1-2]進一步分析所得到的神經網絡數學模型。E.M.IZHIKEVICH[3]在數學上證明了生物細胞模型與PCNN模型的一致,從生物學角度提供了PCNN應用于圖像處理、圖像識別的理論依據。PCNN在圖像處理過程中可看作為一個單層二維的局部連接網絡,圖像的每一個像素點相當于一個神經元,神經元在與相應的像素點連接的同時還與相鄰的其他神經元相連,現已將PCNN用于圖像去噪、圖像分割、圖像增強、圖像邊緣檢測、圖像融合、圖像識別、圖象編碼等方面。在邊緣提取方面,現已有的邊緣檢測技術主要分為經典邊緣檢測算法(如Sobel、Robert、Prewitt、Laplace、Canny等),二是基于一些新興技術的邊緣檢測算法(如小波變換、形態學、神經網絡、遺傳算法、分形理論、SVM等),其中涉及到仿生視覺的PCNN由于具有良好的脈沖傳播特性在圖像處理領域被廣泛應用,如醫學圖像處理[4]、運動目標處理[5]、缺陷識別[6]以及不同領域的圖像邊緣檢測[7-9]等。在道路建設與維護領域,目前還沒有成熟的專門針對路面坑洞的邊緣提取技術,由于路面坑洞圖像受周邊環境影響因素較大,當道路路面不平整或坑洞邊緣區域與正常路面區域相近、相似時,現有的邊緣檢測算法就很難取得較好的檢測效果。筆者通過分析PCNN的仿生物視覺特性與路面坑洞圖像特征,將PCNN與形態學相結合,提出了一種基于PCNN與形態學的坑洞邊緣提取方法。該方法一方面結合坑洞圖像特征對原PCNN模型進行改進,使其更好地與實際工程應用相結合;另一方面采用數學形態學對PCNN提取結果進行后續處理,優化邊緣提取效果。實驗結果表明,在對路面坑洞圖像的邊緣提取中,該方法與經典邊緣檢測算法和基本PCNN相比,抗干擾能力強,提取到的坑洞邊緣更加清晰、可用。
1 概 述
1.1 PCNN模型
Eckhorn建立了PCNN的基本神經元模型,其內部活動項是收到的輸入信號和周圍神經元信號的一種非線性調制,其輸出是二值脈沖時間序列。但模型中參數較多,具體應用中參數設定非常麻煩。針對這一情況,筆者將以文獻[10]的改進脈沖耦合神經元模型(如圖1)為基本模型對坑洞圖像的邊緣提取,該模型的數學方程描述為:
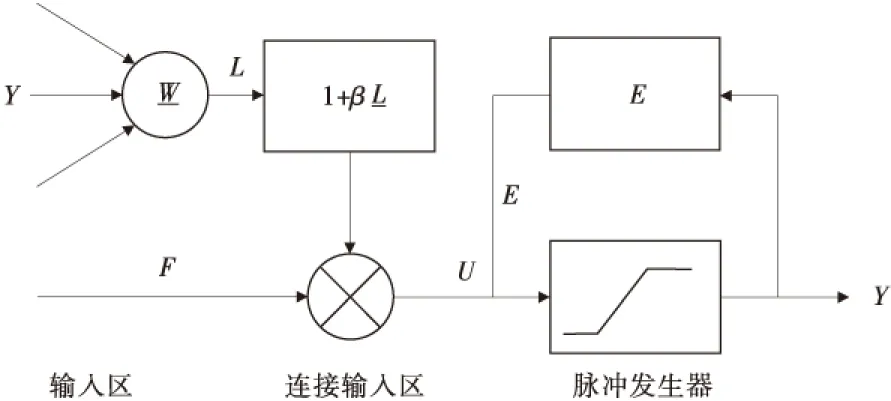
圖1 脈沖耦合神經網絡元模型Fig.1 Pulse coupled neural network metamodel
(1)
(2)
Uij(n)=Fij(n)[1+βLij(n)]
(3)
(4)
Eij(n)=e-αEEij(n-1)+VEYij(n)
(5)
式中:Fij(n)為樹突的反饋輸入;Lij(n)為線性連接輸入;Uij(n)為非線性連接調制構成的內部活動項;Yij(n)為PCNN脈沖輸出;Eij(n)為神經元內部活動項Uij(n)能否激發脈沖產生所需的動態門限;VF,VL,VE分別為反饋輸入域、耦合連接域、動態門限E的放大系數;αF,αL,αE為對應的衰減時間常數;β為內部活動項的連接系數;Iij(n)為神經元外部輸入信號(在圖像處理中是該圖像(i,j)處的像素灰度值);矩陣Mijkl和Wijkl分別為反饋輸入域和耦合連接域的連接矩陣。
1.2 形態學
數學形態學處理圖像的基本思想是利用一定形態的結構元素去度量和提取圖像中的對應形狀,以達到對圖像分析和識別的目的。在圖像處理過程中,一般有膨脹、腐蝕、開啟和閉合4種基本運算[11],其在數學上的定義為:設X(x,y) 是輸入的圖像灰度函數,a(x,y)是給定的結構元素,且都定義在R2或Z2上,DX和Da分別是函數X(x,y)和a(x,y)的定義域,則a(x,y)對X(x,y)進行運算。
膨脹運算表示為:
(X⊕a)(s,t)=max{X(s-x,t-y)+
a(x,y) |(s-x),(t-y)?DX,(x,y) ?Da}
(6)
腐蝕運算表示為:
(X?a)(s,t)=max{X(s-x,t-y)-a(x,y)|(s-x),(t-y)?DX,(x,y) ?Da}
(7)
根據上述膨脹腐蝕的基本變換定義,可以推導出邊緣提取的形態學數學表示。設E(x,y)表示圖像的邊緣函數,則按照形態膨脹構造的圖像邊緣檢測算子為:
Ed(x,y)=X⊕a(x,y)-X(x,y)
(8)
按照形態腐蝕構造的圖像邊緣檢測算子為:
Ee(x,y)=X(x,y)-X?a(x,y)
(9)
按照形態膨脹腐蝕構造的邊緣檢測算子為:
Ede(x,y)=(X⊕a)-(X?b)
(10)
數學形態學邊緣檢測方法簡單,且易于硬件實現,但是由于結構元素單一,與結構元素同方向的邊緣敏感,而與其不同方向的邊緣或噪聲會被平滑掉。雖然數學形態學存在以上不足,但由于路面坑洞邊緣的提取并不要求十分精確、精準,即使所提取到的坑洞邊緣比原邊緣粗糙(不能很細致地展現坑洞邊緣),只要能大致描述路面坑洞形狀,保證坑洞邊緣連續、清晰、可用即可,因此將形態學邊緣檢測應用在道路養護中的路面坑洞檢測上,在實際的工程應用中是可以完全可行的。
2 PCNN模型改進
2.1 模型簡化
因道路和環境的不同,所采集到的坑洞圖像的差異是很大的,這也就意味著不同圖像所設定的PCNN模型參數會有差異,即存在大量PCNN模型的參數處理。然而,在原PCNN模型中涉及到的參數有VF,VL,VE,αF,αL,αE,β,Iij,Mijkl,Wijkl,大量的參數雖然能夠更精確地描述脈沖耦合神經網絡的特性,但同時也極大地增加了模型中參數設定難度和后續邊緣提取的計算量。
根據圖1采用簡化的PCNN模型,將圖像的像素灰度值Iij直接作為返回輸入信號,將線性連接輸入項的衰減部分e-αLLij(n-1)置為0、固有電勢VL置為1,即式(1)、式(2)簡化為:
Fij(n)=Iij
(11)
(12)
這樣既保留了PCNN的生物視覺基本特征、外部輸入刺激和連接域神經元刺激,又減少了參數、降低了運算復雜度。
2.2 線性連接輸入項
線性連接輸入項是由權值矩陣Wijkl與上一次的PCNN輸出Ykl(n-1)進行卷積運算得到,其中權值矩陣Wijkl一般與像素之間的歐氏距離有關。但是這種線性連接輸入項的計算僅考慮到像素間空間距離的影響,而沒有考慮圖像中像素灰度值差異較大所帶來的影響。
在路面坑洞圖像的提取過程中,由于坑洞邊緣的像素值和周圍路面的像素值差異不是很大,因此邊緣和非邊緣區域同時點火的可能性本身就很大,如果再按照原PCNN模型的線性連接輸入項計算方法,僅考慮像素間空間距離的影響,則可能造成圖2(a)和圖2(b)的情況,使得邊緣和非邊緣同時點火。圖2中黑色表示邊緣神經元,白色表示非邊緣神經元,圖2(a)的中心的非邊緣神經元與多個邊緣神經元相連且具有較強的連接關系,當周圍邊緣神經元點火產生的刺激不斷地傳遞到中心神經元處,則可能造成非邊緣神經元點火。同理,圖2(b)的中心邊緣神經元會因為周圍的多個非邊緣神經元點火而點火。因此,本就較難提取邊緣的坑洞圖像經原PCNN模型邊緣檢測,可能使得提取邊緣更加困難,所得邊緣更不可用。
利用已有的經典邊緣檢測算子Dijkl和基本PCNN權值矩陣Wijkl同時對上一次的PCNN輸出Ykl(n-1)進行卷積運算,取兩者卷積結果的最大值作為線性連接輸入項,即式(12)改進為:
(13)
這樣既加強了邊緣區域神經元之間的聯系,使坑洞圖像的邊緣區域進行二次處理[12],同時也很好地利用了PCNN的生物特性,使邊緣提取效果更好。
2.3 邊緣值
利用PCNN模型進行圖像邊緣檢測,如何準確判斷邊緣點是關鍵。原PCNN模型一般將圖3(該圖為二值圖像,黑色表示1,白色表示0,灰色表示不考慮)所示的中心神經元視為邊緣點,并用Yij[n]表示其激發脈沖輸出,其輸出只有兩種狀態,即當神經元內部活動項U大于動態門限E時輸出1(激發或點火),反之輸出0(抑制或不點火)。
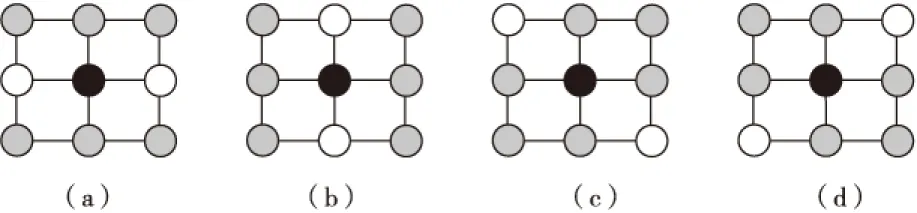
圖3 邊緣點類型示意Fig.3 Schematic diagram of the edge pixel types
就路面坑洞圖像而言,這種圖像受周圍環境影響因素較大,易形成椒鹽噪聲,要求邊緣檢測算法具有很好的自適應性和抗噪性。筆者采用董繼陽[13]提出的局域窗口內邊緣值計算方法來計算邊緣值,并用其計算結果對脈沖耦合神經網絡的脈沖輸出進行調制,使脈沖輸出Yij[n]在[0,1]之間,即將式(4)改為:
(14)
式中:Eij[n]是第(i,j)個像素的邊緣值;maxE(n)是第n次迭代所有象素中的最大邊緣值。
Eij[n]=2×(|I1-I5|+|I2-I6|+|I3-I7|+|I4-I8|)-(|I1-I2|+|I2-I3|+|I3-I4|+|I4-I5|+|I5-I6|+|I6-I7|+|I7-I8|+|I8-I1|)
(15)
I1~I8是像素點(i,j)鄰域的8個象素點的像素值,如圖4。

圖4 對鄰域像素進行編號Fig.4 Numbering neighborhood pixels
3 IM-PCNN方法
3.1 IM-PCNN
基于改進的形態學脈沖耦合神經網絡的邊緣提取方法(The edge extraction method based on improved morphological & pulse coupled neural network, IM-PCNN)是以脈沖耦合神經網絡和形態學特性為基礎的一種邊緣檢測方法。利用IM-PCNN進行邊緣檢測,首先對待檢測圖像進行預處理,然后利用改進的PCNN模型對圖像進行分割,最后利用數學形態學的腐蝕膨脹算法對分割后的二值圖像進行優化及邊緣提取。
3.2 圖像增強
通常情況下,路面坑洞圖像的質量受周邊環境因素的影響很大,坑洞邊緣與路面相似度高,即坑洞圖像邊緣區域與非邊緣區域的對比度較小。從理論上講,邊緣檢測算法對圖像各區域對比度大的圖像進行邊緣提取,其效果往往要好于對比度小的圖像。因此,為了提高路面坑洞圖像的邊緣提取效果,可以在進行邊緣檢測之前對坑洞圖像各灰度區域進行圖像增強。
另外,如果坑洞圖像所在路面平整度低、粒度大(如瀝青碎石路面、水泥混凝土路面)等,可以在保證坑洞邊緣不失真的情況下,采取一定程度的圖像平滑、濾波等預處理操作,盡量降低周圍環境對路面坑洞邊緣的影響。
3.3 實施步驟
坑洞圖像經過預處理之后,用改進的PCNN模型進行圖像分割,然后再用數學形態學對分割后的二值圖像進行邊緣提取。具體步驟如下:
1)初始化;
2)圖像增強等預處理操作;
3)將預處理之后的圖像像素值作為外界刺激信號Iij輸入改進的PCNN網絡;
4)設置PCNN模型參數;
5)由式(11)、式(13)、式(3)、式(14)、式(5)計算每個神經元的內部活動項Uij,并得到脈沖輸出結果Y;
6)判斷迭代是否已達上限,是否已經得到結果。若是,則輸出結果,否則繼續步驟5);
7)用形態學結構元素對PCNN輸出結果進行腐蝕膨脹運算以及邊緣提取,最終得到坑洞邊緣。
4 實驗結果與分析
為了驗證邊緣提取方法的有效性,筆者將分別用經典邊緣檢測算法 Sobel、Prewitt、Robert、Laplace、Canny、基本PCNN和辦法對坑洞圖像進行邊緣提取,并比較不同提取辦法所提取到的坑洞邊緣是否清晰、可用。另外,筆者還對原始坑洞圖像(模擬非平整路面)和預處理之后的圖像(模擬平整路面)進行邊緣提取,以此來檢驗IM-PCNN提取辦法對周圍環境的抗噪特性。選用的PCNN模型參數為:動態門限Eij的固有電勢VE=0.5,耦合連接域Lij的固有電勢VL=1,動態門限衰減時間常數αE=0.75,突觸之間的連接強度β=0.4,內部連接權值矩陣為:
4.1 邊緣檢測評價方法
邊緣檢測的評價方法是對所提出的邊緣檢測算法以及經過該算法所得到的結果進行評價,一般按照評價過程是否有評價指標分為直觀評價和數值評價。
采用直觀評價和數值評價兩種方法進行邊緣檢測效果評價。直觀評價以相關領域專家的直觀判斷為依據,將將提取到的邊緣效果分為優、良好、一般、差、極差5個等級;數值評價采用磨少清[14]所提出的一種不基于邊緣基準圖的邊緣檢測方法評價。該評價方法以重構相似度MSSIM、邊緣置信度BIdx和連續性指標CIdx三者的加權和作為評價指標,即:
EIdx=ws×MSSIM+wb×BIdx+wc×CIdx
(16)
式中:ws,wb,wc分別為重構相似度、邊緣置信度和連續性指標的權重,且要求ws+wb+wc=1。
EIdx越大,說明邊緣檢測的質量越好。文中使用的權重為:ws=0.2,wb=0.3,wc=0.5。
4.2 實驗結果與分析
實驗1 用預處理之后的坑洞圖像模擬平整路面的坑洞圖像,并用經典邊緣檢測算子、基本PCNN以及IM-PCNN對其進行邊緣提取,邊緣提取結果如圖5、圖6。


圖5 經典邊緣檢測算法下平整路面坑洞的邊緣提取結果Fig.5 Edge extraction results of the pothole on the even surface of road by the classical edge detection algorithm
圖5(a)為預處理之后的坑洞圖像,該圖像降低了周圍環境對坑洞的影響,并用其模擬平整路面坑洞圖像。圖5(b)~圖5(f)分別是經典邊緣檢測算子Sobel、Prewitt、Robert、Laplace、Canny下的邊緣提取結果。
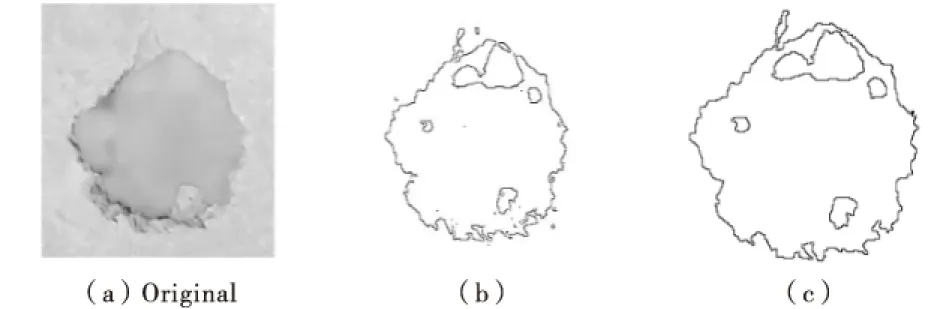
圖6 PCNN和IM-PCNN下平整路面坑洞的邊緣提取結果Fig.6 Edge detection results of the pothole on an even road surface by PCNN and IM-PCNN
圖6(b)是用PCNN進行提取,圖6(c)所示邊緣提取結果是用本文IM-PCNN方法進行提取的,其直觀評價結果如表1、數值評價結果如表2。
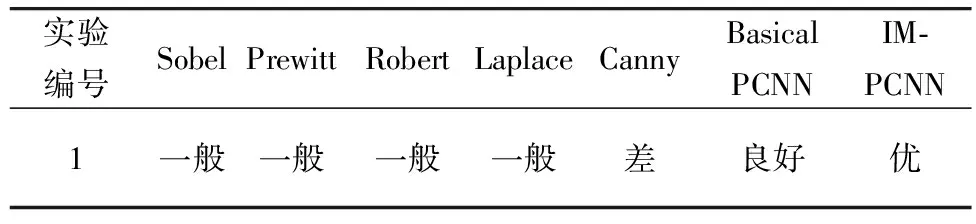
表1 不同方法的邊緣提取直觀評價結果
從直觀評價的角度來看,經典邊緣檢測算法對路面坑洞圖像進行提取效果并不理想,特別是Canny算子,所提取到的坑洞邊緣幾乎不可用。基本PCNN提取效果比經典邊緣檢測算法好,與經典邊緣檢測算法相比較,PCNN能更好地提取出坑洞的邊緣,但是由于坑洞邊緣的不規則性,部分邊緣可能出現斷點、不連續、多重邊、碎邊緣等現象。與基本PCNN相比,加入了數學形態學的IM-PCNN能更好地針對坑洞邊緣不規則性,進一步消除了“碎邊緣”現象,使提取到的坑洞邊緣更加連續、清晰、可用。

表2 不同方法的邊緣提取數值評價結果
從表2中可以看出經典邊緣檢測算法由于提取到的邊緣像素點比PCNN和IM-PCNN多,保留了更多的邊緣細節,因此重構相似度相對較高,但邊緣置信度和邊緣連續性卻很低,導致最終的提取效果并不理想。IM-PCNN利用形態學特性去除了大量邊緣細節,同時最大可能地保證了邊緣的連續性,在數值評價結果中效果最好。
實驗2 對原始坑洞圖像(即非平整路面的坑洞圖像)進行邊緣提取,對比經典邊緣檢測算子、基本PCNN以及IM-PCNN對環境的抗噪能力。
圖7(a)為非平整路面的坑洞圖像,路面環境對坑洞存在一定程度的影響。圖7(b)~圖7(f)分別是經典邊緣檢測算子Sobel、Prewitt、Robert、Laplace、Canny下的邊緣提取結果。
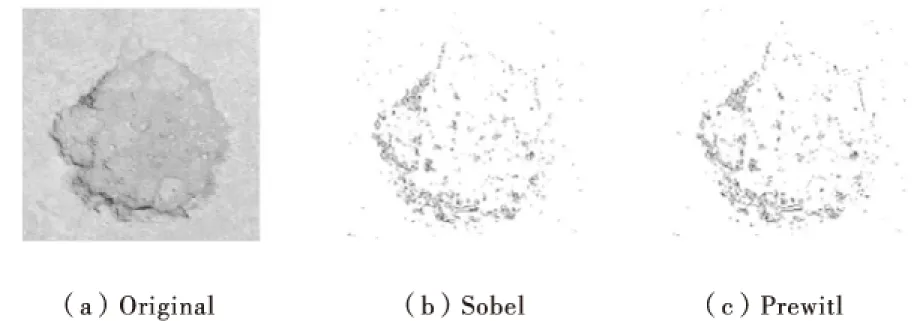

圖7 經典邊緣檢測算法下非平整路面坑洞的邊緣提取結果Fig.7 Edge extraction results of the pothole on the uneven surface of road by the classical edge detection algorithm
圖8是用PCNN和IM-PCNN對非平整路面坑洞進行邊緣提取所得結果。實驗2的直觀評價結果如表3,數值評價如表4。
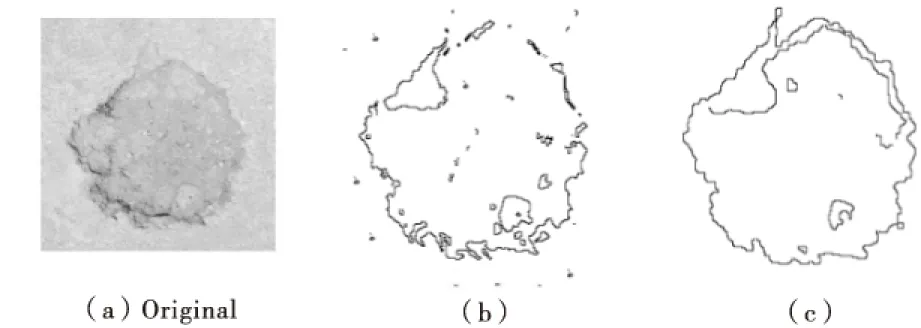
圖8 PCNN和IM-PCNN下非平整路面坑洞的邊緣提取結果Fig.8 Edge extraction results of the pothole on the uneven surface of road by PCNN and IM-PCNN

表3 不同方法的邊緣提取直觀評價結果
從直觀評價角度來看,對于非平整路面的坑洞邊緣提取,經典邊緣檢測算法所提取到的坑洞邊緣不連續、難以識別,并存在大量的噪聲,在實際的工程應用中幾乎不可用。利用了生物視覺特性的PCNN對于噪聲抑制能力明顯比經典邊緣檢測算法強,但是所提取到的邊緣仍然存在很多噪聲、部分邊緣不連續。而IM-PCNN所提取到的邊緣效果卻很好,不僅能有效地抑制周圍環境對坑洞邊緣的影響,還能清晰、連續、有效的將坑洞邊緣提取出來。

表4 不同方法的邊緣提取數值評價結果
從表4中可以看出對于非平整路面來說,經典的邊緣檢測算法不僅將坑洞邊緣像素點盡量多地保留下來,同時也將大量的噪聲保留了下來。大量的不規則噪聲使其提取到的邊緣散亂、不連續,并且可信度差,因此邊緣置信度和連續性指標都很低。IM-PCNN與基本PCNN相比,由于加入了數學形態學,經過圖像預處理和形態學特性,消除了大量的環境噪聲,保留了坑洞圖像的關鍵邊緣,因此IM-PCNN的連續性和邊緣置信度指標數值更大,邊緣提取效果更好。
5 結 語
提出了一種基于改進的PCNN與形態學的坑洞邊緣提取方法,對基本PCNN模型進行改進,并利用數學形態學特性對坑洞邊緣進行優化。文中IM-PCNN邊緣提取方法主要應用于道路養護領域,由于在實際工程應用中,路面坑洞的邊緣不需要很精確,但一定要連續、完整、可用,因此PCNN仿生物視覺和數學形態學膨脹腐蝕特性相結合,既能保證所提取邊緣的完整、可用,又不會影響到實際的工程應用。實驗結果表明,IM-PCNN邊緣提取能夠有效地抑制周圍路面環境對坑洞邊緣的影響,無論是平整路面、還是非平整路面,在邊緣提取的能力和抗噪能力都優于經典邊緣檢測算法和基本PCNN算法,所提取到的邊緣更加完整、清晰、可用。
[1] ECKJOM R,REITBOECK H J,ARNDT M,et al.Feature linking via synchronization among distributed assemblies:simulation of results from cat cortex [J].NeuralComputer,1990,2(3):293-307.
[2] ECKHOM R,FRIEN A,BAUER R,et al.High frequency oscillations in primary visual cortex of awake monkey [J].NeuroRep,1993,4(3):243-246.
[3] IZHIKEVICH E M.Class I Neural Excitability,Conventional Synapses,Weakly Connected Networks [J].IEEETransactionsNeuralNetwork,1999,10(3):499-507.
[4] 張寶華,劉鶴,侯賀.基于多聚類中心和PCNN的醫學圖像融合算法[J].激光與紅外,2014(4):452-456. ZHANG Baohua,LIU He,HOU He.Medical image fusion based on multi-cluster centers and PCNN [J].Laser&Infrared,2014(4):452-456.
[5] 王慧斌,沈俊雷,王鑫,等.基于脈沖耦合神經網絡融合的壓縮域運動目標分割方法[J].光子學報,2014,41(8):914-921. WANG Huibin,SHEN Junlei,WANG Xin,et al.Moving object segmentation based on fusion-PCNN in compressed domain[J].ActaPhotonicaSinica,2014,41(8):914-921.
[6] 周新星,王典洪,孫林,等.基于非下采樣Contourlet變換和PCNN的表面缺陷自動識別方法[J].應用基礎與工程科學學報,2013,21(1):174-184. ZHOU Xinxing,WANG Dianhong,SUN Lin,et al.Automatic recognition method of surface defects based on Non-subsampled Contourlet transform and PCNN [J].JournalofBasicScienceandEngineering,2013,21(1):174-184.
[7] 薛錦樹,聶仁燦,周冬明,等Unit-Linking PCNN中的彩色圖像邊緣檢測[J].計算機工程與應用,2011,47(17):188-191. XUE Jinshu,NIE Rencan,ZHOU Dongming,et al.Color image edge detection using Unit-Linking PCNN [J].ComputerEngineeringandApplications,2011,47(17):188-191.
[8] 亢伉.基于改進PCNN與矢量法的輸送帶邊緣檢測[J].計算機系統應用,2014,23(7):165-169. KANG Kang.Conveyor belt edge detection algorithm based on the improved PCNN model and vector method [J].ComputerSystems&Applications,2014,23(7):165-169.
[9] 李志強,程飛燕,安黎哲,等.基于多維PCNN的彩色枸杞細胞顯微圖像的邊緣檢測[J].蘭州大學學報(自然科學版),2009,45(5):130-134. LI Zhiqiang,CHENG Feiyan,AN Lizhe,et al.Edge detection of color images based on the improved multi-dimensional PCNN [J].JournalofLanzhouUniversity(NaturalScience),2009,45(5):130-134.
[10] JCAULFIELD H,KINSER J M.Finding the shortest path in the shortest time using PCNN’s [J].IEEETransactionsNeuralNetwork,1999,10(3):604-606.
[11] 孫燮華.數字圖象處理——原理與算法[M].北京:北京大學出版社,2012. SUN Xiehua.DigitalImageProcessing-PrinciplesandAlgorithms[M].Beijing:Peking University Press,2012.
[12] 李建鋒,辛國江.一種基于PCNN的醫學圖像邊緣提取方法[J].計算機應用研究,2010,27(11):4389-4393. LI Jian feng,XIN Guojiang.PCNN-based medical image edge extraction [J].ApplicationResearchofComputers,2010,27(11):4389-4393.
[13] 董繼揚.基于脈沖耦合神經網絡的灰度圖像邊緣提取[J].計算機應用,2003,23(9):50-52. DONG Jiyang.Grayscale image edge detection based on pulse-coupled neural network [J].ComputerApplications,2003,23(9):50-52.
[14] 磨少清.邊緣檢測及其評價方法的研究[D].天津:天津大學,2011. MO Shaoqing.ResearchonEdgeDetectionanditsEvaluation[D].Tianjin:Tianjin University,2011.
Potholes Image Edge Extraction Based on PCNN and Morphology
SU Zhouyu1, LAN Quanxiang2, YUAN Quan1, CAO Jianqiu2
(1. Guizhou Highway Bureau, Guiyang 550003, Guizhou, P.R.China; 2. School of Information Science & Engineering, Chongqing Jiaotong University, Chongqing 400074, P.R.China)
The potholes image edge extraction was studied, the pulse coupled neural network model was improved, and an image edge extraction method based on PCNN and morphology was proposed. The basic PCNN model was optimized and the original model parameters were simplified. Furthermore, the linear input and the calculation method of the output pulse of the original model were improved. First of all, the image was enhanced to eliminate the influence of potholes surrounding environment on the potholes edges to some extent in the process of image edge extraction. And then, the improved PCNN model as well as the dilation and erosion characteristics of morphology was used to carry out the edge extraction. The experimental results show that: the proposed method is more effective than the traditional edge extraction method in the road potholes image edge extraction and has stronger anti-interference ability, which can effectively restrain the influence of the road surrounding environment on the potholes edge. And the extracted edges are clearer and more available.
highway engineering; PCNN; morphology; potholes; edge
2014-11-15;
2015-04-08
重慶市科委攻關項目(CSTC 2011AC6102);重慶高校創新團隊建議計劃項目(KJTD201306)
粟周瑜(1959—),男(侗族),貴州三穗人,高級工程師,主要從事公路建設管理工作。E-mail:23978258@qq.com。
蘭全祥(1990—),男,四川攀枝花人,碩士,主要從事圖像處理方面的研究。E-mail:15123213773@qq.com。
10.3969/j.issn.1674-0696.2016.01.12
TP391.41;U416.2
A
1674-0696(2016)01-060-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
石油瀝青(2021年4期)2021-10-14 08:50:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
