鐵路駝峰測重機常見故障淺析
2016-05-30 08:26:12曹志華
中小企業管理與科技·下旬刊 2016年2期
關鍵詞:信號
曹志華
摘 要:T·ZY型駝峰測重機是駝峰溜放自動化、半自動化控制系統中的重要基礎設備,是測定溜放車輛重量等級的計量裝置。在現代化駝峰編組站,車輛的溜放速度是依靠減速器來調整的,車輛的重量等級是調整速度的重要依據。
關鍵詞:測重機;駝峰自動化;信號
1概述
①T·ZY型駝峰測重機是駝峰溜放自動化、半自動化控制系統中的重要基礎設備,是測定溜放車輛重量等級的計量裝置。在現代化駝峰編組站,車輛的溜放速度是依靠減速器來調整的,車輛的重量等級是調整速度的重要依據。在自動化駝峰場,尤其是以減速器——減速頂為調速設備的點連式調速系統,在對間隔制動部位速度的調整和目的制動部位速度的調整中,平均重量是作為減速器出口速度的重要參數。
②在使用可控減速頂控制溜放速度的小型駝峰場,可控頂群的制動狀態是由車輛重量等級的大小來決定的。
③在使用非重力式減速器的站場,減速器的制動等級要根據車輛平均重量等級來選定。判斷車組重量等級是正確使用非重力式減速器的關鍵。如果制動等級選低了,減速器制動力太小,不能有效地將車速降下來,可能造成追鉤,使道岔不能及時轉動而溜錯。反之,如果制動等級選得過高,有可能將車輪擠出,造成脫軌事故。因此,判斷車組重量等級是正確使用非重力式減速器的關鍵。
2 駝峰測重機常見故障淺析
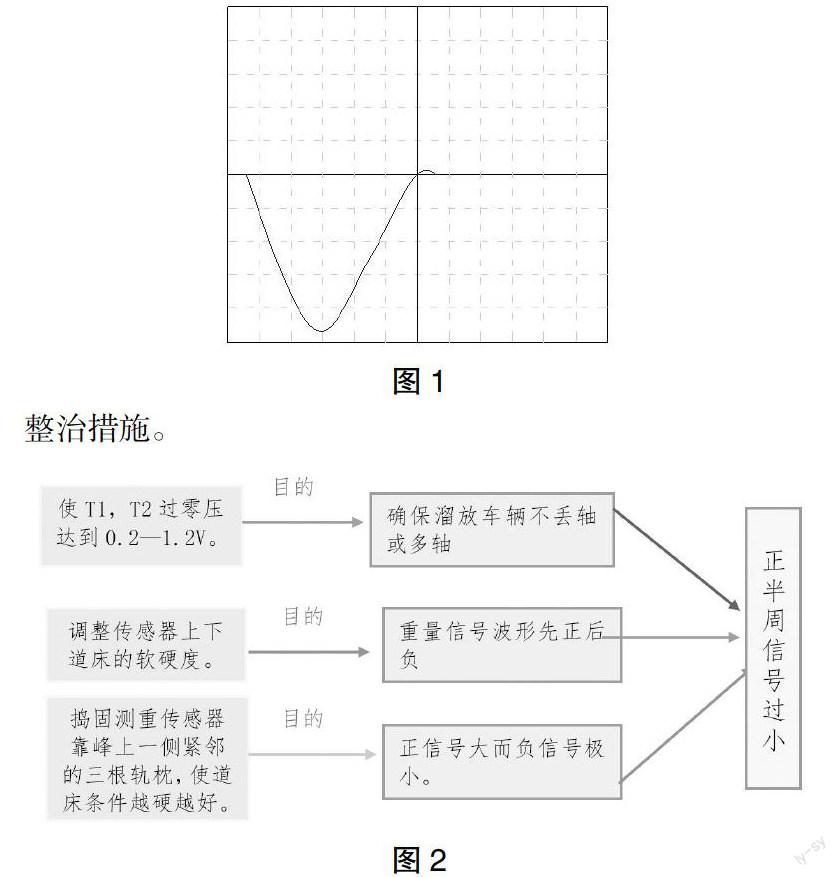
2.1 正半周信號過小
正半周信號過小導致重量信號的峰值向上達不到過零電壓值,不會產生中斷脈沖,因此無重量顯示。
當正半周信號過小時,如下圖所示。
2.2 過零電壓小于0.8V
過零電壓小于0.8V導致傳電壓不穩,造成測重無顯示。整改措施:測重多軸一般多為重車多軸,通常是由于道床條件不好造成。由電務值班人員通知并指導工務工區對測重軌道區段進行搗固。在工務搗固作業的前后,分別用示波器觀察重量信號的波形,檢查重量信號波形在搗固前后是否有大的變化,若不符合使用的要求,要再次通知工務工區對測重軌道區段進行搗固,直到符合使用標準為止。如果搗固作業不能解決問題,可適當調高過零電壓。當過零電壓調整至0.8-1V時還不能解決問題,則應調換室外傳感器信號線后重新進行調試。在此之前,可將過零電壓適當提高,但不建議此電壓值超過1V,過高的過零電壓可能會造成輕車丟軸。調整完畢后室內需重新調零及核對車重。丟軸一般多為輕車丟軸。可將過零電壓適當降低。用示波器觀察重量信號波形,檢查是否為正半周信號過小。若是,可通過將室外測重電纜盒中的信號線對調方式調整相位,使信號正半周變大。調整完畢后室內需重新調零及核對車重。
有的時候重車也會發生極個別的丟軸現象,此時若用示波器觀察車輛的重量信號會發現當車輛通過傳感器上方時正半周信號極大而負半周信號極小,有時甚至沒有負半周信號。
當同一轉向架上前輪通過測重傳感器后由于此時車速較快,正半周信號來不及降到過零值以下后輪的重量信號又進來了,會造成同一轉向架前輪的重量信號丟失,每輛重車只有兩個輪重顯示。此時必須通知工務工區對較大的正半周信號一側進行搗固作業,使重量信號正負半周基本對稱,工務作業完畢后室內需重新調零及核對車重。
2.3 傳感器靈敏度小于4mV
傳感器靈敏度小于4mV導致傳感器故障,造成測重無顯示。整治措施:首先檢查測重機前面板上的電流表指示是否在規定的范圍內,用機車和空車作為標準,調整重量電位器,使車重達到標準。檢查室外測重傳感器的三項參數是否符合要求,當傳感器的靈敏度只有4mV或更小時有可能出現此故障現象。此時可通過調整室內測重機內部相應的信號處理板上A2這組跳線來增加重量信號的直流放大倍數。放大倍數調整后室內需重新調零及核對車重。用示波器觀察過車時的重量信號波形,檢查重量信號波形正半周幅度是否過小,可通過對調室外電纜盒中信號線來調整相位,使正半周幅度變大。相位調整后室內需重新調零及核對車重。拔掉測重機背面的CZ3插頭,使測重機前面板上的兩位數碼管點亮,模擬測重軌道區段占用,使測重機處于開機狀態。把調零開關放在調試位置,將數字萬用表用直流電壓檔接在峰值測試孔上,調整調零電位器,此時測量出來的峰值電壓應只隨電位器的調整而上升卻不會隨之下降。將電壓向上調整至1.2V左右,然后反方向調整調零電位器,當調零電壓降至過零值附近時,峰值電壓跳低,前面板兩位數碼管顯示20噸左右的重量,同時測重機蜂鳴器發出短促聲響。若在調整過程中峰值電壓隨調零電位器的向下調整而逐漸降低,說明測重機內部相應的信號處理板損壞,需及時更換。
3 結束語
駝峰測重機常見故障時比較復雜的,并不是僅僅以上這幾種,不有很多其他故障都有可能影響到生產的正常運行,甚至影響到工作人員的人身安全。因此,要想在駝峰測重機的使用過程中發生事故,就要多研究起重機的故障,分析原因,撰寫預防措施,共同把一切不安全隱患消滅于萌芽狀態,定期保養、定期檢查,確保駝峰測重機的正常運行、企業正常運轉。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06