火電廠自控系統的PID控制研究
2016-05-30 10:48:04李剛
中國高新技術企業 2016年12期


摘要:文章針對PID控制在火電廠自動控制中的應用進行了分析,并針對鍋爐汽包液位調節系統、蒸汽溫度自動調節系統進行了探析,旨在為火電廠自動控制系統設計和管理人員提供一定的參考。
關鍵詞:火電廠;自控系統:PID控制;鍋爐汽包液位調節系統;蒸汽溫度自動調節系統 文獻標識碼:A
中圖分類號:TP273 文章編號:1009-2374(2016)12-0013-02 DOI:10.13535/j.cnki.11-4406/n.2016.12.006
PID控制器是根據系統的誤差,采用微分計算、積分以及比例計算出控制量進行控制的,具有調整方便、可靠性高、穩定性好以及結構簡單等眾多優點,受到眾多工業企業的青睞,逐漸成為工業控制的主要控制技術之一。如果不能夠完全地掌握被控對象的參數和結構或者數學模型結構不精確時,難以采用其他控制理論和技術,必須根據控制人員的經驗來進行現場調解,應用PID控制技術能夠有效地解決上述問題。也就是說,即使一個完全不了解的被控制對象或者系統,在沒有獲得被控對象或者系統的任何參數時,通常采用PID控制技術進行處理,由此可見PID控制技術的重要性。因此,文章針對火電廠自控系統PID控制的研究具有非常重要的現實
意義。
1 PID控制在火電廠自動控制中的應用分析
火電廠的自動控制系統非常復雜,并且運行環境、被控對象的不確定性、變化性特點,想要創建精確的數學模型,其難度非常高,導致火電廠的自動控制難以實現。控制器參數整定的質量,會對閉環控制系統的運行質量產生很大的影響,計算機技術在火電廠自動控制系統中的應用,實現火電廠控制系統逐漸地向智能化、自動化方向發展。但是,現代火電廠最常采用的控制系統為分散控制系統,分散控制系統具有非常強的管理功能和過程控制功能,不僅能夠利用模型的先進控制算法,還能夠實現解耦、串級、超馳、前饋等先進控制算法,例如回路正當系統、TREMPERMME的預測算法、MAX-1000中的自適應算法功能、滾動預測控制軟件等,無論采用哪一種先進控制算法,在分散控制系統中,PID依然占據主導地位。因此,火電廠的自動控制系統以PID控制為基礎。參數整定是PID控制的關鍵環節,傳統獲取PID整定參數的方法為創建被控對象的數學模型,按照某種整定原則對PID參數進行整定,并確定PID參數,該種參數整定的方法對控制人員的理論知識和經驗的要求相對較高,并且在對PID參數值進行整定的過程中,在噪聲、負荷變化等因素的影響下,會對模型結構造成一定的影響,使模型參數發生一定的變化,即傳統的PID控制系統在運行的過程中,不僅很難創建對象的數學模型,在各種因素的影響下,還會出現控制系統偏離工作點的現象,影響PID參數整定結果和系統品質。
現階段,PID控制器的參數的整定逐漸采用自整定技術,基于模糊理論自整定PID控制器的結構,本文設置的模糊自整定PID控制器具有不依賴精確數學模型進行模糊控制的能力,并且具有控制精度高、PID控制器結構簡單等優點,模糊PID控制器輸入偏差變化率ec和被控參數的偏差e,模糊PID控制器輸出三個參數的修正量(比例系數、積分系數以及微分系數),通過對被控參數的偏差、偏差變化率進行檢測,然后再利用模糊理論進行推理,能夠對PID控制器的參數進行調節,以此滿足不同時刻被控參數偏差與偏差變化率對PID參數自整定的實際需求,同時,該系統還具有良好的靜態特性和動態特性。
2 鍋爐汽包液位調節系統的分析
汽包液位會對鍋爐運行的安全性和穩定性產生一定的影響,當汽包液位降低至一定高度后,很容易導致鍋爐出現爆裂的現象,影響水循環系統的正常運行,甚至會出現干鍋的現象;一旦汽包液位上升到一定的高度,很容易導致汽水分離裝置出現問題,當蒸汽出現過飽和問題時,將會導致液態的水進入到蒸汽系統中,不僅會對蒸汽的質量產生一定的影響,還會加快鍋爐結垢。由此可見,無論汽包液位過高或者過低都會造成不良的影響,甚至引發事故。同時,當鍋爐負荷增加后,還會發生更多的化學反應,在反應的過程中產生更多的熱能,會降低汽包壓力。由于鍋爐汽包液體的沸點受到壓力的影響,壓力越高則沸點越高,壓力越低則沸點越低,鍋爐內的液體會出現劇烈沸騰的現象,導致鍋爐內的水位提高,影響鍋爐水循環的正常運行。因此,為了使鍋爐的進水量、儲水量處于相對平衡的狀態,應該對汽包的液位進行合理的調整,始終保持汽包液位在中位線附近浮動。三沖量調節是汽包液位調節系統的關鍵環節,即蒸汽量調節、汽包液位調節以及給水量調節,采用該控制回路進行汽包液位調整,能夠有效地解決汽包液位虛假的問題。PID調節節點公式表示為:
當鍋爐負荷增加時,汽包液位會出現虛假上升的現象,但是當負荷增加時,F汽、L液會增大,以此保證PID調節節點不發生變化,以此避免主給水閥出現變動,采用該調節控制回路進行汽包液位控制,能夠有效地解決虛假液位的現象。此外,當水蒸發量增加時,汽包液位會隨著水蒸發量的增加而降低,根據公式可知,PID調節節點會增加,主給水閥會變大,增加給水量,實現進出水量的平衡,保證汽包液位始終處于平衡狀態。
3 蒸汽溫度自動調節系統的分析
蒸汽溫度會影響燃料的化學反應,進而影響燃料化學能轉化成電能的效率,如果蒸汽的溫度低于一定值,將會減弱驅動汽輪機的動力,降低發電系統的發電率;如果蒸汽溫度超過一定值,并且溫度超過了過熱器管道的承受范圍,將會損壞過熱器管道,影響火電廠發電進程,甚至還會造成嚴重的安全事故。因此,在火電廠自動控制系統中,必須采用PID控制技術進行蒸汽溫度的調節。影響蒸汽溫度的因素主要包括溫度、壓力和主蒸汽流量,其中對蒸汽溫度影響最大的是主蒸汽流量,隨著負荷的上升,過熱蒸汽的流速與流量增加,延遲時間、時間常數、靜態增益等都會降低,會對對象的特性產生很大的影響。由此可見,主蒸汽溫度系統屬于多模型
系統。
多模型系統的創建過程表現為:以主蒸汽溫度系統為對象,確定工作變量,例如輸出、輸入以及狀態變量等;對工作空間進行分解,通常劃分成n個操作子空間(n由對象的非線性決定,n不能過少,如果過少,則不能夠真實、準確地反映對象的動態特性;n不能過多,如果過多,則設計和計算過程復雜),為每一個操作子空間創建相應的過程局部數學模型,通過加權把所有的局部模型轉換成全局非線性模型。假設Y為全局工作空間,Yi表示局部工作空間,局部工作空間傳遞函數公式表
示為:
式中:U(s)表示多模型控制系統的控制器綜合輸出;Gi(s)在第i個局部空間辨識獲得;Yi(s)表示局部模型輸出。
采用模糊隸屬函數的加權求和法創建多模型調度機制,也就是用隸屬度數ai(v)表示局部模型,全局多模型公式表示為:
即通過局部模型的加權和,獲得全局多模型。
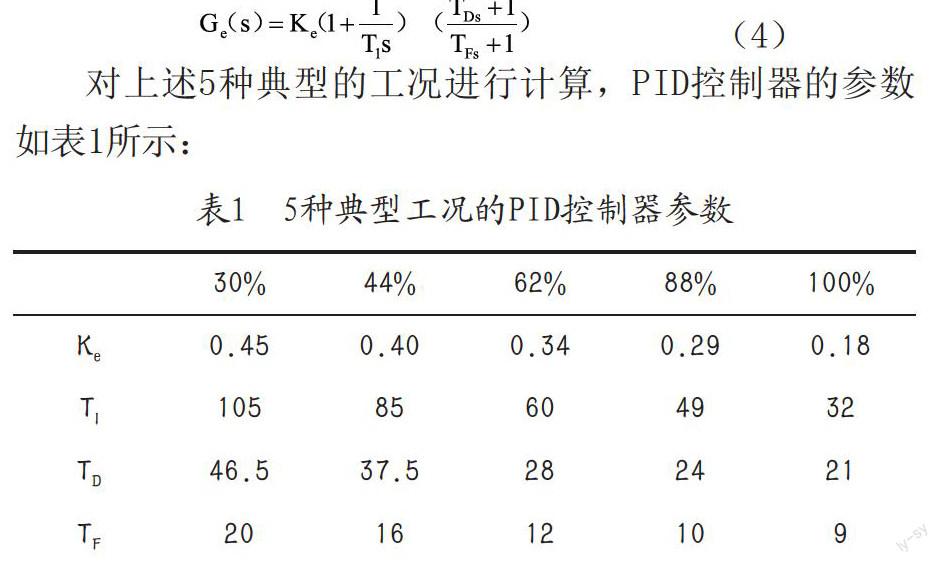
文章以某鍋爐為例,創建5個局部工作點(負荷介于30%~100%)的主蒸汽溫度對象模型,其動態特性數學模型參數表現為:負荷30%,導前區的動態特性參數為8.07/(1+24s)2,惰性區的動態特性參數為1.48/(1+46.6s)4;負荷44%,導前區的動態特性參數為6.65/(1+21s)2;惰性區的動態特性參數為1.66/(1+39.5s)4,負荷62%,導前區的動態特性參數為4.35/(1+19s)2,惰性區的動態特性參數為1.83/(1+28.2s)4;負荷88%,導前區的動態特性參數為2.01/(1+16s)2,惰性區的動態參數為2.09/(1+22.3s)4;負荷100%,導前區的動態參數為1.58/(1+14s)2,惰性區的動態參數為2.45/(1+15.8s)4。PID控制器控制回路的固定參數KI為0.04,KP為1.1,外回路PID控制器的公式表示為:
對上述5種典型的工況進行計算,PID控制器的參數如表1所示:
4 結語
火電廠自動控制系統中PID控制的應用能夠對火電廠的整個生產流程進行控制,避免各種干擾因素對PID參數整定產生影響,顯著地提高了火電廠自動控制系統運行的安全性和可靠性,在提高火電廠發電效率的同時降低了運行成本。
參考文獻
[1] 李國峰,張旭.火電廠控制系統中的PID控制[J].電站系統工程,2011,27(2).
[2] 孟戰勇.火電廠自控系統的PID控制[J].自動化應用,2013,(12).
[3] 姜東旭.火電廠鍋爐主汽溫智能PID控制研究[J].中國電力教育,2013,(8).
[4] 武彬,張欒英.模糊自整定PID控制在主汽溫控制中的應用[J].計算機仿真,2015,32(2).
[5] 王安,楊青青,閆文宇.模糊自整定PID控制器的設計與仿真[J].計算機仿真,2012,29(12).
作者簡介:李剛(1988-),男,重慶人,大唐陜西發電有限公司渭河熱電廠助理工程師,研究方向:熱控。
(責任編輯:黃銀芳)
