基于根軌跡法的飛機(jī)控制系統(tǒng)反饋設(shè)計(jì)
2016-05-30 06:41:40劉伯健
企業(yè)科技與發(fā)展 2016年1期
劉伯健
【摘 要】根軌跡法是經(jīng)典控制理論中十分重要的一種直觀的分析方法,由于它在設(shè)計(jì)反饋系統(tǒng)方面十分便捷、清晰,所以根軌跡法在飛行控制系統(tǒng)的設(shè)計(jì)上有著重要的應(yīng)用地位。文章以根軌跡分析方法為基礎(chǔ),以F16飛機(jī)為模型,進(jìn)行飛行控制系統(tǒng)的設(shè)計(jì)和分析,并用MATLAB仿真驗(yàn)證。
【關(guān)鍵詞】根軌跡法;飛行控制;MATLAB
【中圖分類號(hào)】V249 【文獻(xiàn)標(biāo)識(shí)碼】A 【文章編號(hào)】1674-0688(2016)01-0040-03
隨著現(xiàn)代控制理論的不斷發(fā)展,經(jīng)典控制理論不斷受到?jīng)_擊。但是經(jīng)典控制理論中仍有很重要、很優(yōu)良的分析方法值得學(xué)習(xí)研究。文章就以根軌跡法在飛行控制系統(tǒng)中的設(shè)計(jì)應(yīng)用為例,說(shuō)明經(jīng)典控制理論在現(xiàn)代科學(xué)中仍有著十分重要的應(yīng)用地位。
現(xiàn)代控制理論與經(jīng)典控制理論是相輔相成的關(guān)系,并不是相互取代的關(guān)系,在控制系統(tǒng)的設(shè)計(jì)上,經(jīng)典控制理論仍占有著不可替代的位置。經(jīng)典控制理論是建立在頻率響應(yīng)法和根軌跡法的基礎(chǔ)上,根軌跡法作為其中重要的一部分,是經(jīng)典控制理論中對(duì)系統(tǒng)進(jìn)行分析和綜合的基本方法之一,并有著自己特殊的優(yōu)勢(shì)。根軌跡主要研究系統(tǒng)運(yùn)動(dòng)的穩(wěn)定性、時(shí)間域和頻率域中系統(tǒng)的運(yùn)動(dòng)特性、控制系統(tǒng)的設(shè)計(jì)原理和校正方法。
從1948年伊凡思(W.R.Evans)提出了根軌跡法后,通過(guò)運(yùn)用根軌跡法就避免了求解特征方程困難的難題。它借助于參數(shù)連續(xù)變化,特征根在復(fù)平繪制出的軌跡來(lái)分析系統(tǒng)的特性,十分簡(jiǎn)便快速,并且在根軌跡圖上可以輕松地找到參數(shù)的取值。但是繪制根軌跡曾經(jīng)是個(gè)枯燥的工作,工作人員需要通過(guò)描點(diǎn)、計(jì)算、經(jīng)驗(yàn)來(lái)繪制并不精確的根軌跡圖,不過(guò)計(jì)算機(jī)技術(shù)發(fā)展以后,通過(guò)MATLAB成為一個(gè)十分簡(jiǎn)便繪制根軌跡的方法。
飛行控制系統(tǒng)是用來(lái)保證飛行器的穩(wěn)定性和操縱性、提高完飛行品質(zhì)、增強(qiáng)飛行的安全及減輕駕駛員負(fù)擔(dān)的控制系統(tǒng)。它分為橫向和縱向兩個(gè)控制面。這兩個(gè)控制面之間存在耦合和相互作用。本文設(shè)計(jì)僅針對(duì)于小擾動(dòng)的忽略耦合作用的縱向面控制系統(tǒng)的反饋設(shè)計(jì)。設(shè)計(jì)要求減小荷蘭滾模態(tài)對(duì)飛機(jī)的影響,并使系統(tǒng)能達(dá)到超調(diào)量小于5%,調(diào)解時(shí)間小于3 s的優(yōu)良動(dòng)態(tài)特性。由于飛機(jī)在不同的初始條件下配平參數(shù)不同、狀態(tài)方程不同,所以文章僅就F16飛機(jī)在3 500 m,150 m/s的小擾動(dòng)狀態(tài)配平下進(jìn)行設(shè)計(jì)(配平已給出)。下面我們就以根軌跡法為基礎(chǔ)設(shè)計(jì)F16飛機(jī)的縱向控制反饋系統(tǒng),并運(yùn)用MATLAB進(jìn)行仿真驗(yàn)證。
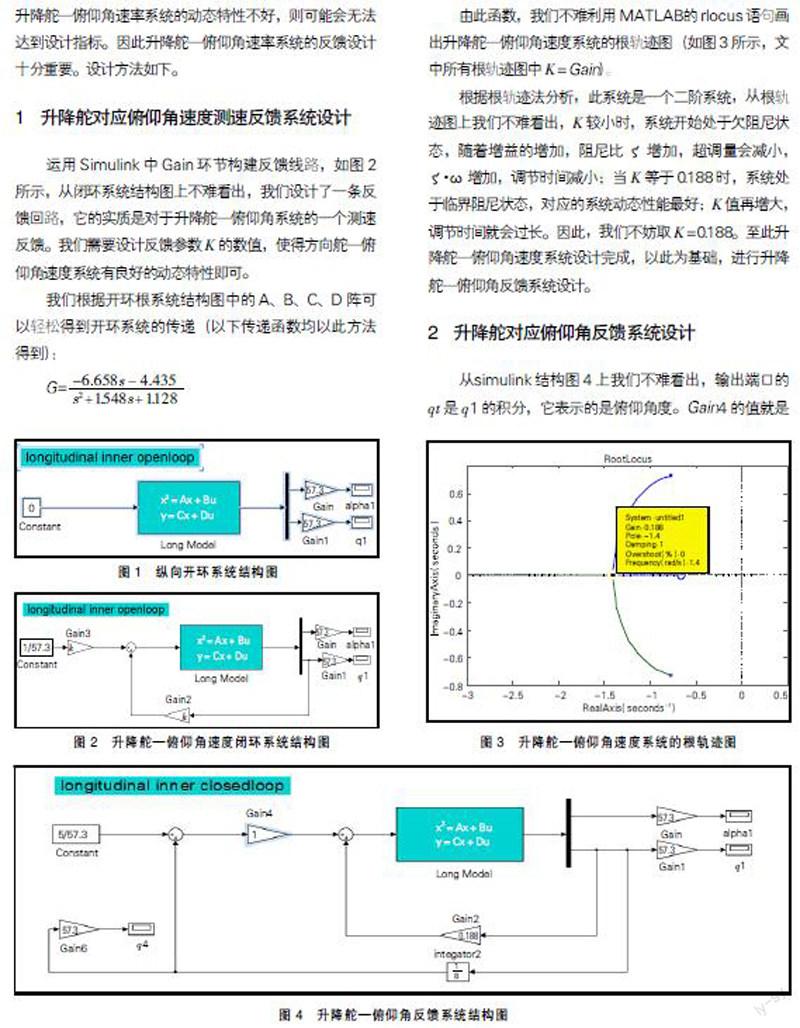
通過(guò)MATLAB中的Simulink功能構(gòu)建飛機(jī)縱向系統(tǒng)的仿真模型,對(duì)于飛機(jī)縱向系統(tǒng)(即升降舵—俯仰角系統(tǒng))來(lái)說(shuō),線性化過(guò)后的系統(tǒng)是一個(gè)單輸入二輸出的系統(tǒng)(q為機(jī)體軸俯仰角速率,alpha為迎角)。因此,我們構(gòu)建如圖1所示模型。
我們要想使升降舵—俯仰角系統(tǒng)有很好的動(dòng)態(tài)特性,我們需要先提高升降舵—俯仰角速率系統(tǒng)的動(dòng)態(tài)特性,使其達(dá)到一個(gè)優(yōu)良的性能。因?yàn)樯刀妗┭鼋撬俾氏到y(tǒng)的動(dòng)態(tài)特性直接影響到升降舵—俯仰角系統(tǒng)的動(dòng)態(tài)特性,若升降舵—俯仰角速率系統(tǒng)的動(dòng)態(tài)特性不好,則可能會(huì)無(wú)法達(dá)到設(shè)計(jì)指標(biāo)。因此升降舵—俯仰角速率系統(tǒng)的反饋設(shè)計(jì)十分重要。設(shè)計(jì)方法如下。
1 升降舵對(duì)應(yīng)俯仰角速度測(cè)速反饋系統(tǒng)設(shè)計(jì)
運(yùn)用Simulink中Gain環(huán)節(jié)構(gòu)建反饋線路,如圖2所示,從閉環(huán)系統(tǒng)結(jié)構(gòu)圖上不難看出,我們?cè)O(shè)計(jì)了一條反饋回路,它的實(shí)質(zhì)是對(duì)于升降舵—俯仰角系統(tǒng)的一個(gè)測(cè)速反饋。我們需要設(shè)計(jì)反饋參數(shù)K的數(shù)值,使得方向舵—俯仰角速度系統(tǒng)有良好的動(dòng)態(tài)特性即可。
我們根據(jù)開(kāi)環(huán)根系統(tǒng)結(jié)構(gòu)圖中的A、B、C、D陣可以輕松得到開(kāi)環(huán)系統(tǒng)的傳遞(以下傳遞函數(shù)均以此方法得到):
G=■
由此函數(shù),我們不難利用MATLAB的rlocus語(yǔ)句畫(huà)出升降舵—俯仰角速度系統(tǒng)的根軌跡圖(如圖3所示,文中所有根軌跡圖中K=Gain)。
根據(jù)根軌跡法分析,此系統(tǒng)是一個(gè)二階系統(tǒng),從根軌跡圖上我們不難看出,K較小時(shí),系統(tǒng)開(kāi)始處于欠阻尼狀態(tài),隨著增益的增加,阻尼比ζ增加,超調(diào)量會(huì)減小,ζ·ω增加,調(diào)節(jié)時(shí)間減小;當(dāng)K等于0.188時(shí),系統(tǒng)處于臨界阻尼狀態(tài),對(duì)應(yīng)的系統(tǒng)動(dòng)態(tài)性能最好;K值再增大,調(diào)節(jié)時(shí)間就會(huì)過(guò)長(zhǎng)。因此,我們不妨取K=0.188。至此升降舵—俯仰角速度系統(tǒng)設(shè)計(jì)完成,以此為基礎(chǔ),進(jìn)行升降舵—俯仰角反饋系統(tǒng)設(shè)計(jì)。
2 升降舵對(duì)應(yīng)俯仰角反饋系統(tǒng)設(shè)計(jì)
從simulink結(jié)構(gòu)圖4上我們不難看出,輸出端口的qt是q1的積分,它表示的是俯仰角度。Gain4的值就是我們需要設(shè)計(jì)的升降舵—俯仰角系統(tǒng)的反饋參數(shù)值。
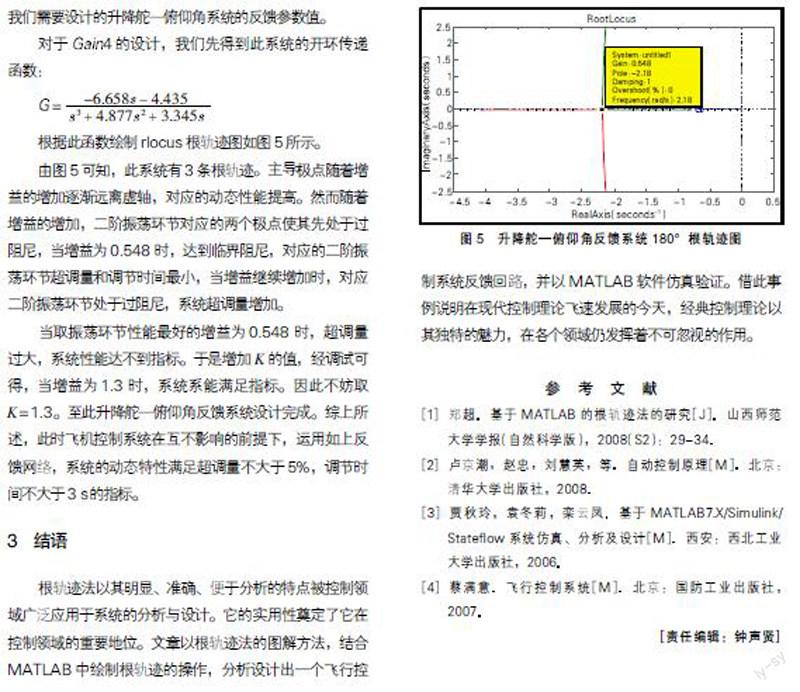
對(duì)于Gain4的設(shè)計(jì),我們先得到此系統(tǒng)的開(kāi)環(huán)傳遞函數(shù):
G=■
根據(jù)此函數(shù)繪制rlocus根軌跡圖如圖5所示。
由圖5可知,此系統(tǒng)有3條根軌跡。主導(dǎo)極點(diǎn)隨著增益的增加逐漸遠(yuǎn)離虛軸,對(duì)應(yīng)的動(dòng)態(tài)性能提高。然而隨著增益的增加,二階振蕩環(huán)節(jié)對(duì)應(yīng)的兩個(gè)極點(diǎn)使其先處于過(guò)阻尼,當(dāng)增益為0.548時(shí),達(dá)到臨界阻尼,對(duì)應(yīng)的二階振蕩環(huán)節(jié)超調(diào)量和調(diào)節(jié)時(shí)間最小,當(dāng)增益繼續(xù)增加時(shí),對(duì)應(yīng)二階振蕩環(huán)節(jié)處于過(guò)阻尼,系統(tǒng)超調(diào)量增加。
當(dāng)取振蕩環(huán)節(jié)性能最好的增益為0.548時(shí),超調(diào)量過(guò)大,系統(tǒng)性能達(dá)不到指標(biāo)。于是增加K的值,經(jīng)調(diào)試可得,當(dāng)增益為1.3時(shí),系統(tǒng)系能滿足指標(biāo)。因此不妨取K=1.3。至此升降舵—俯仰角反饋系統(tǒng)設(shè)計(jì)完成。綜上所述,此時(shí)飛機(jī)控制系統(tǒng)在互不影響的前提下,運(yùn)用如上反饋網(wǎng)絡(luò),系統(tǒng)的動(dòng)態(tài)特性滿足超調(diào)量不大于5%,調(diào)節(jié)時(shí)間不大于3 s的指標(biāo)。
3 結(jié)語(yǔ)
根軌跡法以其明顯、準(zhǔn)確、便于分析的特點(diǎn)被控制領(lǐng)域廣泛應(yīng)用于系統(tǒng)的分析與設(shè)計(jì)。它的實(shí)用性奠定了它在控制領(lǐng)域的重要地位。文章以根軌跡法的圖解方法,結(jié)合MATLAB中繪制根軌跡的操作,分析設(shè)計(jì)出一個(gè)飛行控制系統(tǒng)反饋回路,并以MATLAB軟件仿真驗(yàn)證。借此事例說(shuō)明在現(xiàn)代控制理論飛速發(fā)展的今天,經(jīng)典控制理論以其獨(dú)特的魅力,在各個(gè)領(lǐng)域仍發(fā)揮著不可忽視的作用。
參 考 文 獻(xiàn)
[1]鄭超.基于MATLAB的根軌跡法的研究[J].山西師范大學(xué)學(xué)報(bào)(自然科學(xué)版),2008(S2):29-34.
[2]盧京潮,趙忠,劉慧英,等.自動(dòng)控制原理[M].北京:清華大學(xué)出版社,2008.
[3]賈秋玲,袁冬莉,欒云鳳.基于MATLAB7.X/Simulink/Stateflow系統(tǒng)仿真、分析及設(shè)計(jì)[M].西安:西北工業(yè)大學(xué)出版社,2006.
[4]蔡滿意.飛行控制系統(tǒng)[M].北京:國(guó)防工業(yè)出版社,2007.
[責(zé)任編輯:鐘聲賢]
