雙曲率玻璃面優化擬合方法研究
2016-05-30 07:16:19劉晶彭丹楊平
企業科技與發展 2016年1期
關鍵詞:汽車
劉晶 彭丹 楊平
【摘 要】文章在雙曲率玻璃擬合方法的基礎上進行了優化,并首次提出了雙曲率玻璃面二次擬合算法,同時分析了擬合影響因子,給出了相對工程的標準方法。在該擬合方法的指導下,已經在UG NX平臺上實現了自動優化程序的開發,經過了工程實踐驗證。
【關鍵詞】汽車;玻璃面;雙曲率;擬合;UG NX
【中圖分類號】U463 【文獻標識碼】A 【文章編號】1674-0688(2016)01-0098-04
汽車車門雙曲率玻璃面多以圓環面或者鼓形面進行擬合。即用規則幾何體——圓環面或者鼓形面作為玻璃曲面的擬合目標,來使擬合的玻璃型面在長度和高度方向上都有弧度,使之符合車身外形走勢。
本文在現有玻璃面運動和幾何分析理論的基礎上,提出雙曲率玻璃面的二次擬合方法,進一步提高了擬合精度,并在UG NX平臺上進行了驗證。
1 技術背景
車門玻璃運動時上下轉動運動和軸線方向移動的組合運動,考慮到車門導軌的生產方式,可以認為車門玻璃是在做螺旋運動。這種螺旋運動也就要求玻璃面邊界近似擬合為螺旋線,同時要求運動過程中的邊界誤差小于一定的值,才能保證玻璃面運動光順。
對于雙曲率玻璃,近年國內研究也相對較多。大多以標準解析曲面為擬合目標,采用容差做法實現玻璃的雙曲率設計。其中:圓環面擬合方法詳細說明可以參照參考文獻1。圓環面雙曲率玻璃擬合設計思想如圖1所示。
關于鼓形面擬合的詳細說明可以參照參考文獻2。鼓形面雙曲率玻璃擬合設計思想如圖2所示。
以上方法在工程中都存在諸多的限制條件,并非普適性的工具。
2 設計思想
采用圓環面擬合實現雙曲率效果。設計思路中將面的形狀和位置分開考慮,通過兩次優化擬合操作分別確定。其中:一次優化目標獲取和玻璃面最佳貼合的圓環面,確定大徑、小徑;二次優化調整圓環面的位置,使之和門框控制點的距離誤差在許可范圍內。
利用確定位置的圓環面,計算螺旋中心及半徑,創建輔助圓柱。在輔助圓柱上計算螺旋線。最后投影回圓環面并偏置作為玻璃邊界。
3 設計方法
3.1 一次優化
默認玻璃面UV中心作為起始變量點,將UV參數作為點的參數。分別過該變量點做玻璃面的UV曲線,將UV線擬合為圓弧(如圖3所示)。
以大弧中心為原點,大弧方向為Z軸,小弧方向為X軸建立坐標系。由于曲面UV線不一定保持垂直關系,投影小弧到坐標系YZ平面上,再次將投影線擬合為圓弧(如圖4所示)。
沿大弧中心回轉二次擬合的小弧獲得圓環面。
在玻璃面上選擇4個點,測量它們到擬合面的距離,所得距離值的均方差作為優化目標。
優化程序通過修改變量點參數,反復比對優化目標,取最小值。此時看作擬合面和玻璃面是最佳貼合狀態。
3.2 二次優化
圓環面的變化包括位置平移及角度變換,共6個參數控制。通過其中心坐標系的變換,來定位圓環面的變化位置。即將平移和角度變換6個參數作為優化輸入參數。
作為設計要求,前后門各4個點,共8個點是需要進行控制的對象。在設計上,這8個點到圓環面的距離有特定的要求。設計可能會要求8個點到面距離相等,也可能要求上下距離不等,比如,需要考慮到干涉避讓等。考慮到以上要求,將8個點到圓環面的距離測量值分別減去各自的要求距離,取平方和作為優化目標。這樣當優化目標值最小時,可以看作是圓環面的最佳位置。
由于二次優化輸入變量只有6個,因而無法保證需要優化的8個點全部同時到達完美要求。需要注意的是,優化是特定條件下的一種特定最優結果。
通過一次和二次優化,獲得最能體現設計意圖,并處于最佳設計位置的圓環面。
3.3 獲取輔助圓柱
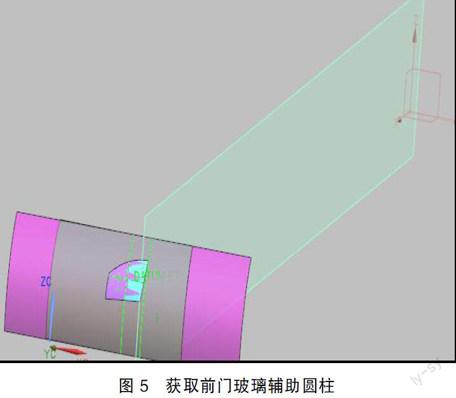
輔助圓柱是計算螺旋線的必要條件。考慮到靠近B柱區域玻璃邊界較長,取用長邊界擬合可以減少誤差,在設計中在靠近B柱位置取圓環面的截面來擬合圓柱,前后玻璃面分別擬合。具體方法如下。
過圓環面中心軸和前玻璃后邊界一點做輔助平面,輔助平面和圓環面的交線作為前玻璃輔助圓柱截面線。過圓環面中心軸和后玻璃前邊界一點做輔助面,輔助平面和圓環面的交線作為后玻璃輔助圓柱截面線(如圖5所示)。
3.4 計算螺旋線
原始玻璃面邊界投影到輔助圓柱面,利用首尾點計算螺旋線。分別做首尾點到輔助圓柱中心的垂線,并測量升程和螺旋角,用于計算螺旋線。
螺旋參數化方程如下:
X(t)=r_front*cos(ang_front*t)
Y(t)=r_front*sin(ang_front*t)
Z(t)=-dist_front*t
其中,dist_front表示為螺旋角ang_front的升程。
后門螺旋線計算方法和前門計算方法相同,不再重復描述。
3.5 計算玻璃邊界
玻璃面已經被擬合為圓環面,因而不可能生成標準的螺旋線,只能生成近似螺旋線(此處是容差做法,后續生產中對導軌要求較高,可能需要修改工藝,改為沖壓法生產并進行整形操作)。
投影“步驟3.4”生成的螺旋線到優化后的圓環面上,并在面上偏置生成玻璃邊界。
向前偏置獲取前邊界。投影上下邊界到圓環面上,并偏置獲取上下邊界。
后車門玻璃做法相同,需要注意輔助圓柱有所不同。前后兩輔助圓柱半徑相同,而且都是從靠近B柱位置得到的截面線,軸線夾角不大,可以確保水切膠條斷差在設計許可范圍內。
3.6 裁剪邊界
利用獲取的邊界修剪片體得到前車門玻璃。
4 運動檢驗
4.1 運動仿真
NX motion模塊是NX用于機構運動和受力分析的模塊,可以模擬各種剛體關節的運動。它對于汽車玻璃面的運動分析也適用。
本例中采用動力學分析環境,定義玻璃在導軌線上運動,分析其下落的不同位置情況。
經過在NX中進行驗證,玻璃面可以表示出下滑打開的過程,并生成一系列中間過程狀態,表達開窗過程中的各個位置。通過測量各個位置與初始面的面偏差和邊偏差可以得知是否符合導軌設計要求。
由于玻璃是在導軌線上運動,加速度導致其運動速度是變化的,因此跟蹤生成的各個位置體也不是等距的。
4.2 幾何分析
通過對運動模型中連桿的自由度進行分析,可以總結出玻璃面的坐標規律,進而將運動學模型簡化為數學模型進行分析和檢測工作。運動學模型中通過三點定位,確定玻璃面的位置。如前門玻璃面,在數學模型中可以簡化計算為后邊界兩端點A點、B點,前邊界一點C點的位置確定方法。具體作圖法如下。
(1)首先確定一點(如后邊界上端點)在后邊界導軌上,即A點。
(2)測量后邊界點之間的長度,以上端點為球心做以測量長度為半徑的球,交后邊界于一點,即為B點。
(3)由于玻璃也是剛體,C點相對AB點的位置不變,因此可以預先求得C點到AB連線的投影點D。繞AB連線做半徑為CD距離的環面,環面和另一導軌交點即為C點。
以上3個步驟確定了初始位置。
計算導軌在起始位置和窗臺位置之間的行程,將行程曲線段按照等距原則等分為5份。這時可以得到5個點,分別針對這5個點執行上面3個步驟,就可以得到另外5個點的玻璃的等距運動位置。
相比之下,運動仿真開發一般會受到引力限制,不能實現等距。因此,推薦使用數學計算法處理。
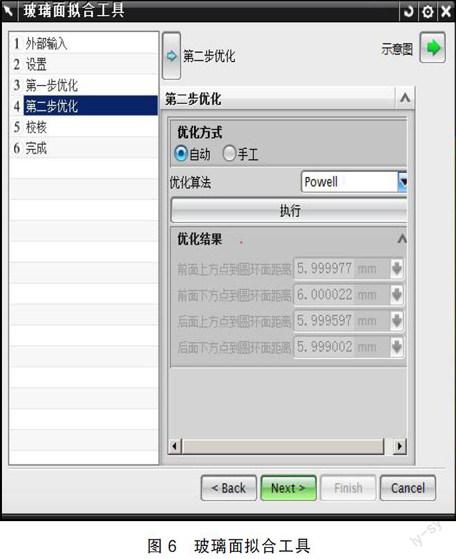
4.3 軟件實現
利用C++語言,進行NX二次開發實現了向導化處理。二次開發的程序采用向導化界面,將上述過程和邏輯固化下來。它簡化了操作流程,并實現了標準化操作。
軟件邏輯的實現,再次證明上述技術方案的邏輯可行性。玻璃面擬合工具如圖6所示。
5 結語
本論文在上汽通用五菱汽車股份有限公司技術中心和天津達展科技有限公司技術部的大力支持下完成,并在UG NX平臺上開發出了對應的自動化程序。經過實踐檢驗,其設計效率和質量都有明顯的提高。
本擬合方法跳出了制圖法進行擬合的套路,提出了利用優化算法自動求取最佳擬合曲面的方法。同時進一步簡化了運動學模型,提出了幾何模型替代運動學模型的運動校核方法。最終通過UG NX軟件實現了自動化流程操作,大大提高了汽車雙曲率玻璃面擬合的精度和自動化程度。
作為應用型研究,玻璃面擬合方法研究也為汽車模塊化設計提供了一些新的可借鑒思路。
參 考 文 獻
[1]雷雨成,張平,陳壽昌,等.雙曲率車門玻璃的圓環面擬合法[J].汽車工程,2005(5).
[2]高大威,高云凱,周曉燕,等.基于鼓形面的車門玻璃及導軌設計[J].同濟大學學報(自然科學版),2012(1).
[3]姜連勃,王紹春.汽車車門設計[J].汽車技術,1999(4).
[4]Ronald Goldman.計算機圖形學與幾何造型導論[M].北京:清華大學出版社,2011.
[5]陳文來.汽車造型設計中的玻璃面擬合研究[J].輕型汽車技術,2015(4).
[6]郭長新.轎車側窗玻璃導軌導引線工程優化設計[J].河南科技月刊,2012(8).
[責任編輯:陳澤琦]
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
