電致動介電高彈聚合物材料研究進展
2016-06-01 12:20:01郭飛泉翟志剛倪楷淇鄭金杰
山東紡織科技 2016年2期
郭飛泉,劉 茜,翟志剛,倪楷淇,鄭金杰
(上海工程技術大學,上海 201620)
電致動介電高彈聚合物材料研究進展
郭飛泉,劉 茜,翟志剛,倪楷淇,鄭金杰
(上海工程技術大學,上海 201620)
介電高彈聚合物是一類活性軟材料,被廣泛應用于轉換器。文章介紹了介電高彈聚合物材料的工作原理、工作模式,以及介電高彈聚合物材料的幾種失效行為,總結了介電高彈聚合物的國內外應用現狀。
介電高彈聚合物;驅動器;失效行為
電致動聚合物作為一種智能材料,具有很好的電性能和機械性能。其形狀和體積在電刺激下會發生改變,電刺激消失后,能夠恢復初始形態。常見的電致動聚合物主要有離子型和電場型,介電高彈聚合物是一種電子型的電致動聚合物材料,其特點有變形大、響應速度快、彈性能密度高、機電轉化效率高、負載匹配性好、環境適應性好、抗疲勞壽命長并具有優異的仿生性能。
1 介電高彈聚合物的工作原理
1.1 介電高彈聚合物變形原理
介電高彈聚合物[1]是一種不可壓縮的智能材料,能夠在靜電力作用下產生瞬發性物理變形,且響應速度非常快。其變形原理[2]是在材料的相對兩面均勻地涂上柔性電極(如碳膏等),施加厚度方向上的電壓后,電子從一端電極流向另一端,異性電荷能夠相互吸引,產生靜電力,介電高彈聚合物在靜電力作用下會減小厚度,擴大面積(如圖1-b)。而當切斷電源后,則靜電力消失,介電高彈聚合物會恢復初始狀態(如圖1-a)。
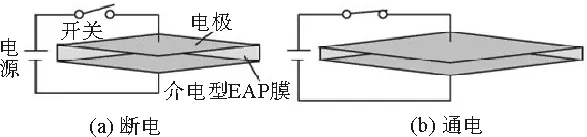
圖1 變形原理
1.2 工作原理
介電高彈聚合物驅動器包括預載荷和EAP膜,其工作原理[3]是利用通電前后,EAP膜表現出不同的力-位移特性,與預載電荷力平衡。圖2中,fp是預載電荷力線,fon是EAP膜通電工作狀態下的位移曲線,fp、fon之間的力差是驅動器推程驅動力,2位置處為兩者平衡處;foff是EAP膜斷電工作狀態下的位移曲線,fp、foff之間的力差是回程力,兩者在1位置處平衡。
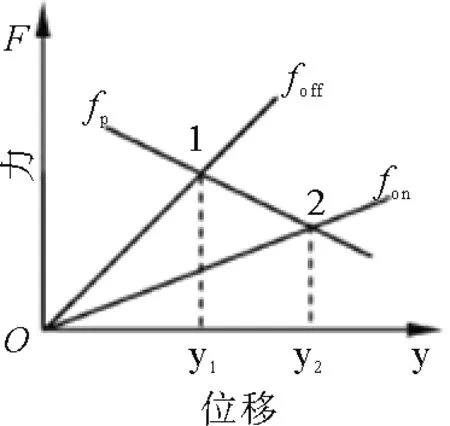
圖2 驅動器力-位移圖
2 工作模式
介電高彈聚合物工作模式分為驅動模式和能量收集模式[4]。不同研究需求下,可選擇兩種不同的工作模式實現電能與機械能之間的轉換。
2.1 驅動模式
驅動模式是指將電能轉換成機械能。通過在EAP膜的相對兩側施加電壓,使介電高彈聚合物在靜電力作用下減小厚度,擴大面積,此過程中電能轉換成機械能輸出。
2.2 能量收集模式
能量收集模式是指將機械能轉換成電能。通過拉伸EAP膜充電后,將拉伸力撤除,EAP膜在彈性回復力作用下恢復未拉伸狀態,此過程中,兩側電極上的異性電荷由于彈性回復力克服靜電力做功,電荷間距離增大,同側電極上的同性電荷間距離減小,因此電勢能增加,機械能轉換成電能輸出。
3 介電高彈聚合物材料的失效
介電體有三類失效形式,包括斷裂失效、擊穿失效和起皺失效[5]。有多種因素能夠引起介電體失效,如拉伸破裂、電擊穿、力電失穩和張力損失。研究介電體失效行為對研發設計長壽命的驅動器有著重大的意義。
3.1 失效形式
3.1.1 斷裂失效:斷裂失效又稱為機械失效,即材料失效,如圖3-a,EAP薄膜在被過度拉伸時,變形范圍超出薄膜所能承受的極限,則斷裂失效發生,薄膜驅動器失去工作能力。
3.1.2 擊穿失效:擊穿失效又稱為介電強度失效[6]。如圖3-b,在施加電壓使薄膜發生變形的過程中,由于所施加電壓超過薄膜所能承受電壓的極限值,薄膜被擊穿,同時產生電火花現象,介電強度失效發生,薄膜驅動器失去工作能力。
3.1.3 起皺失效:起皺失效又稱為力電失穩失效[7]。在施加電壓過程中,薄膜材料厚度減小,面積擴大,此時電壓大小保持不變,靜電力則會增加,材料所能提供的彈性回復力不足以平衡靜電力,因此發生起皺。

圖3 失效形式
3.2 失效行為分析
3.2.1 電擊穿
在對介電彈性體施加電壓時,所施加電壓超過其所能承受電壓的極限值,薄膜被擊穿,產生電火花現象,致使驅動器失去工作能力[8],如圖4所示。假設EEB為介電彈性體擊穿電壓臨界值。電壓超出臨界值,則電擊穿發生;電壓小于臨界值,則不發生電擊穿。擊穿電場和薄膜變形程度滿足:UEB=EEBdλ3λ-2,其中,d為薄膜厚度,λ為平面方向的等雙軸拉伸下的拉伸率。
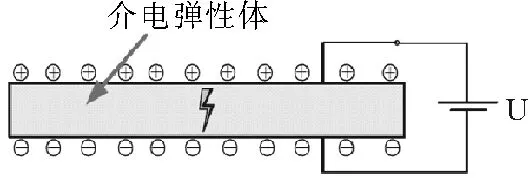
圖4 電擊穿
3.2.2 預拉伸破裂
在驅動器制作時,會對介電彈性體進行預拉伸,以此提高驅動器壽命。預拉伸過程中,拉伸變形若超出其所能承受范圍則會導致其失去工作能力。如圖5所示,在施加拉伸力F后,介電體中高分子聚合物鏈受到強烈拉伸,隨著拉伸力的增大,薄膜發生硬化效應,在超出其所能承受的范圍時,拉伸力F繼續增加,則介電體發生拉伸破裂,導致材料失效。臨界條件可由下列公式表示:λ=λR。
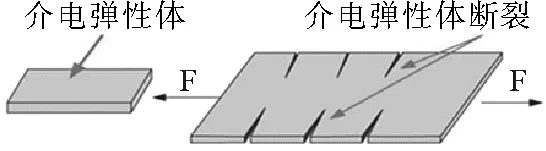
圖5 預拉伸破裂
3.2.3 張力損失
當施加電壓很高時,薄膜受到非常小的壓力就會使薄膜產生褶皺,一些區域變薄使褶皺凸起,致使驅動器失去內應力作用而失效。如圖6所示,拉力為零,張力損失,驅動器失效。
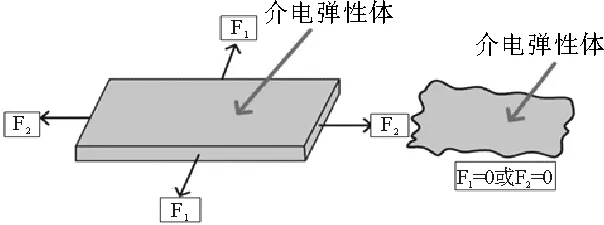
圖6 張力損失
3.2.4 力電失穩
力電失穩是指在介電高彈聚合物的相對兩側施加電壓,薄膜受靜電力作用厚度減小,面積增大。如圖7所示,當電壓不變時,介電彈性體薄膜厚度不斷變小,導致薄膜上的電場強度變大,從而使薄膜厚度進一步減小,循環往復,最終使電場強度超出介電高彈聚合物的臨界電壓,介電高彈聚合物薄膜被擊穿,致使驅動器失效。
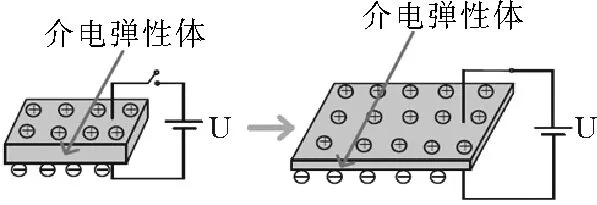
圖7 力電失穩
3.3 起皺行為分析
如圖8所示為張緊狀態和起皺狀態下的介電體薄膜,目前的起皺判別方法主要有三種:主應變判據、主應力判據、主應力應變聯合判據[9]。
(1)主應力判據:主應力判據認為薄膜變形形態只與應力有關。當最小主應力大于零時,薄膜呈張緊狀態;當最大主應力小于等于零時,薄膜呈起皺狀態;當最大主應力和最小主應力都小于等于零時,薄膜呈松弛狀態。
(2)主應變判據:當最大主應變為正,最小主應變小于單軸應力狀態下的泊松比效應預測的應變時,薄膜成起皺狀態;當最大應變為正,最小主應變大于單軸應力狀態下的泊松比效應預測的應變時,薄膜呈張緊狀態;當最大主應變和最小主應變都小于零時,薄膜呈松弛狀態。
(3)主應力應變聯合判據:當最大主應力和最大主應變都小于等于零時,薄膜呈松弛狀態;當最小主應力大于0時,薄膜呈張緊狀態;當最小主應力小于等于零,最大主應變大于零時,薄膜呈起皺狀態。
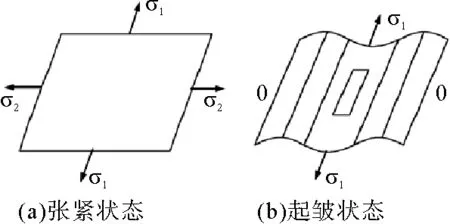
圖8 起皺行為
4 介電高彈聚合物材料的應用現狀
4.1 國外研究現狀
目前,介電高彈聚合物的研究主要集中于介電型EAP驅動器的研究。主要有美國斯坦福Pel班Ne小組、美國麻省理工大學的Dubowsky教授、瑞士聯邦工學院的EMPA研究所Wissler等人、意大利的Pisa大學的Carpi小組以及韓國成均館大學的Choi等學者進行研究。現有介電型EAP驅動器形式主要有圓桶形、錐形、平面形、堆疊形、圓柱形以及菱形。Federico Carpi等人[10]研究制作出一種集成流體介電型EAP驅動器。這種驅動器由上下兩個剛性圓盤固定,EAP薄膜環繞圓盤組成一個封閉的腔體,并在腔體中填充適量的液體從而保證驅動器腔體呈現圓桶狀,同時對驅動器添加類似于壓縮彈簧的對抗性元件以實現軸向預載荷的施加。試驗測試證明,當施加適當工作電壓時,這種驅動器最大可輸出應變量為35%,其最顯著的特點是可以通過調節腔內流體的密度實現調控驅動器質量。PatrickChouinard等人[11]利用介電型EAP驅動器驅動原理,研制出介電型EAP驅動的線性驅動器和擺動驅動器,在對兩種驅動器作出一系列的測試與分析后,得出線性驅動器實際最大位移可以達到16 mm,擺動驅動器的正常工作范圍為±40°。Federico Carpi 等人[12]在2007年研制出一種折疊形介電彈性體驅動器,并利用這種驅動器研制出機器人人手復位校正與人臉眼球控制系統。人手復位校正系統利用折疊式驅動器作為被動彈性體手與人手建立聯系,從而通過一些測量裝置,實現校正功能。機器人人臉眼球控制利用兩個折疊式驅動器連接到一個眼球上,并通過折疊形驅動器的通電順序來實現眼球的轉動。
4.2 國內研究現狀
國內關于介電高彈聚合物的研究起步較國外而言相對較晚。目前,國內幾所大學、研究院對于介電高彈聚合物驅動器的設計、應用以及對驅動器的特性的研究尚處于初始階段。中國科學技術大學的魏源遠等人[13]在2006年對介電型EAP驅動器及其應變響應進行了研究,他們采用基于圓形介電彈性體驅動器模型的研究,觀察其變形特性以及應變響應特性。試驗結果表明:電極的柔軟度必須與材料的性質匹配。太硬的電極會使介電彈性體應變變小,而太柔的電極會使介電彈性體易于擊穿。預應變雖然減弱了單位電壓下的變形量,但卻能提高致動器的最大應變量。圓形介電彈性體驅動器只能用于介電彈性體材料特性的研究,而不能用來做實質性驅動。合肥工業大學的陳娟等人[14]對電場活化聚合物的變形進行了建模與仿真研究。他們采用電場活化聚合物的圓形與方形兩種驅動器結構來進行研究,采用二次正交回歸試驗方法建立了電場活化聚合物變形的模擬仿真數學模型。通過試驗結果與仿真結果進行比較,有效地驗證了電場活性化聚合物材料的變形特性。2007年,合肥工業大學的李剛等人[15]采用 HN-1110T 型的介電彈性體,并根據材料的 Ogden本構模型設計了一種卷軸形一維伸縮致動器。卷軸形致動器能夠實現將電能直接轉化為直線運動。在電壓為6500v作用下,驅動器輸出位移只有3.6 mm。
5 結束語
介電彈性體能量密度高,應變大,效應高,具有材料非線性和幾何大變形特性,而且其承受的載荷還具有多場耦合特點,比如機械力場和電場耦合,機械力場、電場和熱場耦合等等。另外,雖然介電彈性體在致動器,機器人等工程領域應用潛力巨大,但商業應用仍然面臨著巨大挑戰。今后的研究過程中期望得到介電常數更高、柔性更好、驅動力更強、使用壽命更長的介電高彈聚合物材料。此外在新型驅動方面應用也具有重要的研究意義和研究發展空間。目前學者研究介電高彈聚合物復合材料的制作尚處于嘗試階段,沒有取得較大突破,所以今后對于獲得使用壽命更長,驅動力更強,柔性更好的介電彈性材料驅動器可以通過制作介電高彈聚合物復合材料來實現,同時通過復合材料制作各向異性的驅動器。
[1] 欒云廣.介電型EAP驅動的伸縮移動機器人研究[M].南京:南京航空航天大學,2011.
[2] 王化明,朱劍英,葉克貝.介電彈性體線性驅動器研究[J].機械工程學報,2009,45(7):291—296.
[3] 周麗萍,王化明,魏禮建等.介電型EAP線性和彎曲驅動器研究[J].機械設計與制造,2014,(11):115—118.
[4] 朱銀龍,王化明. 介電型電活性聚合物驅動器機電耦合合特性[C].南京:南京航空航天大學,2012.
[5] Vogan J. Development of dielectric elastomer actuators for MRI devices[C].Massachusetts: Massachusetts Institute of Technology, 2004.
[6] 葉克貝.介電彈性體線性驅動器研究[C].南京:南京航空航天大學,2009.
[7] 朱黎輝.電活性介電彈性體薄膜電應變特征的研究[C].吉林:吉林大學,2011.
[8] 朱銀龍.介電EAP換能器機電耦合特性研究[C].南京:南京航空航天大學,2012.
[9] 羅曉健.介電彈性體力電耦合變形與能量轉換行為分析[C].哈爾濱:哈爾濱工業大學,2013.
[10] Ron Peirine,RoyKornbluh,JoeEekerle,PhilJeuek,SeajinOh,QibingPei,ScottStanford.DielectricElastomers:GeneratorModeFundamentalsandAPPlieations[J].SmartStrueturesandMaterials2001:EleetroaetivePolymerAetuatorsand Deviees,2001,(4329):148-156.
[11] Carpi F, Gabriele F, and De Rossi D. Contractile Hydrostatically Coupled Dielectric Elastomer Actuators[J].IEEE,2011.GoulbourneN, FreckerM,MockensturmE,etal.Modeling of a Dielectric EAP Diaphragm for a Prosthetic Blood Pump[C]. Smart Structure and Materials: Electroactive Polymer Actuators and Devices(EAPAD), San Diego, 2003.
[12] F.Carpi.D. De Rossi,Contractile folded dielectric elastomer actuators, Proceedings of Spie[J]. Smart structures and materials 2007,(6524),300—305.
[13] 魏源遠,馮志華,劉永斌,張平,介電彈性體致動器及其應變響應研究[J],功能材料與器件學報,2006,12(6):501—504.
[14] 陳娟,呂新生,電場活化聚合物材料特性的數學建模研究與分析[J],安徽工業大學學報,2007,24(1):50—54.
[15] 李剛,電場活化聚合物(DE)一維伸縮致動器設計[C].合肥:合肥工業大學,2007.
Progress in the Study of Electrically Actuated Dielectric High Elastic Polymer Materials
GuoFeiquan,LiuQian,ZhaiZhigang,NiKaiqi,ZhengJinjie
(Shanghai University of Engineering Science,Shanghai 201620,China)
Dieletric elastomer is a kind of active soft material,which is widelyused in converter. The working principle, working mode and the failure behavior of the Dieletric elastomer were introduced.The application status of the high elastic polymer at home and abroad were summarized.
dieletric elastomer; actuator; failure behavior
2016-03-01
上海工程技術大學市級大學生創新項目(cs1509003)
郭飛泉(1994—),男,福建莆田人,學士。
TS101.3
A
1009-3028(2016)02-0053-04
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中華詩詞(2020年1期)2020-09-21 09:24:52
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
汽車工程學報(2017年2期)2017-07-05 08:13:02
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
