多工況下互連式油氣懸架系統(tǒng)建模及特性研究
2016-06-07 17:34:48張軍偉楊波李洪彪陳思忠李辰
汽車工程學(xué)報(bào) 2016年3期
張軍偉+楊波+李洪彪+陳思忠+李辰

摘 要:采用模塊化的建模方法,建立系統(tǒng)中各個(gè)部件的模型,通過對(duì)各部件數(shù)學(xué)模型的原理分析,確定各部件模型的輸入和輸出。根據(jù)油氣懸架系統(tǒng)的連接關(guān)系將各個(gè)部件模型連接起來,得到多工況下的互連式油氣懸架系統(tǒng)數(shù)學(xué)模型。基于所建立的互連式油氣懸架模型,對(duì)多種典型工況下的系統(tǒng)特性進(jìn)行分析,得到互連式油氣懸架主要參數(shù)的變化特性,為互連式油氣懸架整車控制算法研究提供理論基礎(chǔ)。
關(guān)鍵詞:互連式;油氣懸架;多工況;模塊化建模;系統(tǒng)特性
中圖分類號(hào):U463.33 文獻(xiàn)標(biāo)文獻(xiàn)標(biāo)識(shí)碼:A文獻(xiàn)標(biāo)DOI:10.3969/j.issn.2095-1469.2016.03.09
Abstract:The system model was built up and the characteristics of the interconnected hydropneumatic suspension were studied under multiple modes. The paper provides a theoretical foundation for the research on the whole vehicle control algorithm.
Keywords:interconnected; hydropneumatic suspension; multiple mode; modularity modeling; system characteristics
由于互連式油氣懸架在平衡軸荷、剛度非線性、阻尼可調(diào)、抗側(cè)傾等方面有著顯著的優(yōu)勢(shì),所以被越來越多地應(yīng)用在多軸重型車輛上[1-5]。
多油缸互連式油氣懸架的各油缸上、下腔之間對(duì)應(yīng)或交叉連通,每個(gè)油缸與多條油路連通,每條油路中都裝有阻尼閥和蓄能器。阻尼閥的非線性、蓄能器內(nèi)氣體狀態(tài)變化的非線性、各油路之間交叉連通的非線性,致使互連式油氣懸架成為一個(gè)非常復(fù)雜的系統(tǒng)[6-9]。由于互連式油氣懸架結(jié)構(gòu)的復(fù)雜性,很難利用臺(tái)架試驗(yàn)對(duì)其系統(tǒng)動(dòng)態(tài)特性進(jìn)行研究,因此,很有必要對(duì)互連式油氣懸架進(jìn)行建模,對(duì)各種工況下的系統(tǒng)動(dòng)態(tài)特性進(jìn)行分析。
國(guó)內(nèi)外相關(guān)領(lǐng)域的學(xué)者從多方面應(yīng)用各種方法對(duì)油氣懸架進(jìn)行了深入的研究,但所研究對(duì)象多為結(jié)構(gòu)簡(jiǎn)單的單回路油氣懸架,且多為公式推導(dǎo)式的黑匣子建模方法,不便于中間結(jié)果的輸出,也不易對(duì)整個(gè)油氣懸架系統(tǒng)模型有一個(gè)透徹的認(rèn)識(shí)。
采用傳統(tǒng)的公式推導(dǎo)式建模方法已很難建立互連式油氣懸架模型。針對(duì)結(jié)構(gòu)復(fù)雜的互連式油氣懸架,本文采用模塊化建模方法,首先建立油氣懸架系統(tǒng)中各個(gè)部件的模型,然后通過對(duì)各部件模型的原理分析,確定各部件模型之間的輸入和輸出關(guān)系,最后根據(jù)油氣懸架系統(tǒng)的連接關(guān)系將各個(gè)部件模型連接起來,得到多工況下的互連式油氣懸架系統(tǒng)數(shù)學(xué)模型。模塊化的建模方法,便于中間結(jié)果的輸出,例如某個(gè)閥的流量、蓄能器任意時(shí)刻的壓力等,整體結(jié)構(gòu)非常清晰,能夠?qū)ο到y(tǒng)模型各部分之間的關(guān)系有一個(gè)透徹的認(rèn)識(shí),能夠?qū)?fù)雜的系統(tǒng)分割成一個(gè)個(gè)簡(jiǎn)單部件,適用于復(fù)雜系統(tǒng)的建模。
1 互連式油氣懸架結(jié)構(gòu)
某種用于四軸重型車輛的互連式油氣懸架,前兩橋連通結(jié)構(gòu)與后兩橋相同,一二橋的結(jié)構(gòu)如圖1所示。系統(tǒng)油缸為雙腔油缸,上腔為環(huán)形腔,下腔為無桿腔;前后橋同側(cè)油缸上、下腔對(duì)應(yīng)連通,同橋左、右側(cè)油缸上、下腔交叉連通。壓縮行程時(shí),油缸下腔的油液經(jīng)多條支路流向蓄能器,壓縮蓄能器內(nèi)的氣體產(chǎn)生彈性力,油液流過油路中的阻尼閥產(chǎn)生阻尼力。
為了實(shí)現(xiàn)多軸車輛的軸荷平衡及抗側(cè)傾功能,油氣懸架的各油缸之間是按照一定的規(guī)則連通的,這就不可避免地存在單個(gè)油缸連通多條支路的結(jié)構(gòu)。在不影響系統(tǒng)特性的前提下,省略系統(tǒng)中的部分電磁閥,對(duì)系統(tǒng)進(jìn)行簡(jiǎn)化處理,簡(jiǎn)化后的系統(tǒng)原理如圖2所示。
由圖2可知,互連式油氣懸架的油缸為雙腔油缸,同側(cè)前后橋油缸上、下腔對(duì)應(yīng)連通,實(shí)現(xiàn)平衡軸荷功能,同橋左、右側(cè)油缸上、下腔交叉連通,實(shí)現(xiàn)抗側(cè)傾功能。通過系統(tǒng)中的電磁閥控制,可以實(shí)現(xiàn)懸架剛度控制、側(cè)傾剛度控制、阻尼連續(xù)控制、車高控制、單輪隔離、單輪提升、剛性閉鎖等功能。
2 互連式油氣懸架模型
互連式油氣懸架系統(tǒng)中存在多條支路,每條支路中有多個(gè)閥,系統(tǒng)中有多個(gè)蓄能器,阻尼力的非線性和彈性力的非線性造成互連式油氣懸架系統(tǒng)是一個(gè)非常復(fù)雜的非線性耦合系統(tǒng),很難推導(dǎo)出顯式格式的彈性力、阻尼力、輸出力、系統(tǒng)壓力等的表達(dá)式。因此,通過模塊化的建模方法,得到整個(gè)油氣懸架系統(tǒng)的數(shù)學(xué)模型。
2.1 油缸無桿腔連通油路模型
復(fù)雜的連通關(guān)系導(dǎo)致了單個(gè)油缸與多條支路連通,以油缸1R為例,若油缸1R作為作動(dòng)缸,其它三個(gè)油缸為負(fù)載缸,定義無桿腔受壓縮時(shí)位移為正,無桿腔伸張時(shí)位移為負(fù),則油缸1R無桿腔的油路連通關(guān)系及油液流動(dòng)線路如圖3所示。分析可知,油缸1R無桿腔流出的油液有六個(gè)去處,分別為蓄能器A1R、蓄能器A2R、油缸2R無桿腔、蓄能器AfR、油缸1L有桿腔、油缸2L有桿腔。
建立油缸1R無桿腔壓力微分方程,如式(1)所示。
式中:p1R-p為油缸1R無桿腔的壓力,Pa;x1R、分別為油缸1R活塞位移和速度,m/s;Ap為油缸無桿腔橫截面積,m2;dp為油缸無桿腔直徑,m;dr是油缸有桿腔直徑,m;Q2R-p為油缸2R無桿腔流量,m3/s;QA1R為蓄能器A1R支路的流量,m3/s;QA2R為蓄能器A2R支路的流量,m3/s;QAfR為蓄能器AfR支路的流量,m3/s;QL為左側(cè)油缸1L、2L有桿腔油路中閥組的流量,m3/s;C1R-p為油缸1R無桿腔油路的容積模量,m3/Pa;Vb-p為靜平衡位置的油缸無桿腔容積,m3;Koil為油液體積模量,Pa。
其中,各個(gè)部分的流量可根據(jù)閥和蓄能器的傳統(tǒng)建模方法得到,這里不再詳述,只將各支路流量表示為壓差的函數(shù)形式[10-12],如式(2)所示。
式中:為油缸2R活塞速度,m/s;pA1R、pA2R、pAfR分別為蓄能器A1R、A2R、AfR內(nèi)氣體的壓力,Pa;p12L-r為油缸1L、2L有桿腔壓力,Pa。
2.2 油缸有桿腔連通油路模型
若油缸1R無桿腔受壓縮,則有桿腔為伸張,油液從別處流入油缸1R有桿腔,油缸1R有桿腔的油路連通關(guān)系及油液流動(dòng)線路如圖4所示。
分析可知,流入油缸1R有桿腔的油液有六個(gè)來源,分別為油缸2R有桿腔、蓄能器AfL、蓄能器A1L、蓄能器A2L、油缸1L無桿腔、油缸2L無桿腔。建立油缸1R有桿腔壓力微分方程[13],如式(3)所示。
式中:p1R-r為油缸1R有桿腔的壓力,Pa;Q2R-r為油缸2R有桿腔流量,m3/s;QA1L為蓄能器A1L支路的流量,m3/s;QA2L為蓄能器A2L支路的流量,m3/s;QAfL為蓄能器AfL支路的流量,m3/s;QR為油缸1R、2R有桿腔連通油路中閥組的流量,m3/s;C1R-r為油缸1R有桿腔油路的容積模量,m3/Pa;Vb-r為靜平衡位置的油缸有桿腔容積,m3。
其中,各個(gè)部分的流量同樣可根據(jù)閥和蓄能器的傳統(tǒng)建模得到,這里只將各支路流量表示為壓差的函數(shù)形式,如式(4)所示。
式中:pA1L、pA2L、pAfL分別為蓄能器A1L、A2L、AfL內(nèi)氣體的壓力,Pa;p12L-P為油缸1L、2L無桿腔壓力,Pa。
2.3 互連式油氣懸架模型
由式(1)~(4)可知,未知的參數(shù)包括油缸2R、1L、2L活塞的速度、、,利用牛頓定律,分別對(duì)三個(gè)油缸活塞列出受力平衡方程來求得三個(gè)活塞的速度。油缸活塞受力分析如圖5所示。油缸活塞共受五個(gè)作用力,分別為油缸無桿腔壓力 ppAp,油缸有桿腔壓力prAr,簧載質(zhì)量作用于活塞桿的重力msg,活塞桿自身的重力mpg,活塞與油缸之間的摩擦力Ff。油缸2R、1L、2L活塞動(dòng)力學(xué)方程如式(5)所示。
由式(5)可知,需求出油缸2R無桿腔壓力p2R-p和有桿腔壓力p2R-r,油缸1L無桿腔壓力p1L-p和有桿腔壓力p1L-r,油缸2L無桿腔壓力p2L-p和有桿腔壓力p2L-r。
由于油缸2R與1R直接連通,油路中不含任何閥,若忽略管路的壓力損失,則油缸2R的兩個(gè)腔與油缸1R的兩個(gè)腔具有相同的壓力,如式(6)所示。
油缸1L和2L也是直接連通,那么油缸1L的兩個(gè)腔與油缸2L的兩個(gè)腔具有相同的壓力。首先求油缸1L、2L有桿腔壓力(圖3),根據(jù)油缸1L、2L有桿腔連通油路中的閥組壓差/流量關(guān)系,又因油缸1L、2L負(fù)載和結(jié)構(gòu)參數(shù)相同,則油缸1L和2L的流量相同,即可得到油缸1L、2L有桿腔壓力與活塞速度關(guān)系式(7)。
如圖4所示,同理可求得油缸1L、2L無桿腔壓力與活塞速度關(guān)系式(8)。
其中,活塞和油缸之間的摩擦力采用基于Stribeck曲線擬合的公式來計(jì)算,如式(9)所示。
式中:fv表示粘性摩擦系數(shù);fc表示庫(kù)侖摩擦力,N; fs表示靜摩擦力,N;τs表示靜摩擦力因數(shù);表示活塞運(yùn)動(dòng)速度,m/s。
聯(lián)立式(1)~(9),結(jié)合傳統(tǒng)建模方法得到的各種閥和蓄能器的模型,將各式具體化,進(jìn)而在Matlab/Simulink中實(shí)現(xiàn)單輪激勵(lì)工況下的互連式油氣懸架數(shù)學(xué)模型[14],模型流程圖如圖6所示。
2.4 油氣懸架部件模型驗(yàn)證
為了驗(yàn)證所建立的油氣懸架主要閥、蓄能器、彈性力和阻尼力數(shù)學(xué)模型的正確性,進(jìn)行了臺(tái)架試驗(yàn)。試驗(yàn)設(shè)備采用車輛懸架測(cè)試系統(tǒng)(FCS佛力系統(tǒng)),將油缸豎直安裝在測(cè)試系統(tǒng)上,如圖7所示。
試驗(yàn)條件見表1。
所載入的載荷譜見表2。
在0.01 Hz/0.03 m載荷譜激勵(lì)情況下,由于油缸活塞運(yùn)動(dòng)速度非常小,油液流過阻尼閥產(chǎn)生的阻尼力幾乎為0,因此,可以近似認(rèn)為此時(shí)活塞桿的輸出力即為彈性力。
圖8a是原始數(shù)據(jù)及擬合曲線,黑色波動(dòng)的上下兩條曲線為原始試驗(yàn)曲線,可以近似認(rèn)為壓縮和伸張行程中的摩擦力大小相等,方向相反,兩條曲線的差值即為活塞與油缸之間摩擦力的兩倍,去除摩擦力之后再擬合的曲線如圖8a中的紅色曲線。圖8b中,黑色是仿真的彈性力曲線,紅色是彈性力試驗(yàn)擬合曲線,由圖可知,仿真曲線與試驗(yàn)曲線吻合較好,分析引起細(xì)微差別的可能原因,是由于試驗(yàn)部件中某些參數(shù)的不確定性以及橡膠油管的彈性變形。
在0.5 Hz/0.03 m和1.0 Hz/0.03 m載荷譜激勵(lì)情況下,活塞桿輸出力包括摩擦力、彈性力、阻尼力,活塞桿輸出力去除摩擦力和彈性力,得到阻尼力。仿真曲線與試驗(yàn)曲線對(duì)比如圖9所示。
圖9a和b分別是激勵(lì)0.5 Hz/0.03 m下的阻尼力-位移曲線對(duì)比和阻尼力-速度曲線對(duì)比,可以看出,仿真曲線與試驗(yàn)曲線吻合較好,表明仿真的結(jié)果比較接近實(shí)際情況。
上述仿真與試驗(yàn)對(duì)比表明,所建立的油氣懸架各部件模型是正確的,基于此模型所建立的互連式油氣懸架模型以及后續(xù)的系統(tǒng)特性分析是可信的。
3 各工況下的系統(tǒng)動(dòng)態(tài)特性
3.1 單輪激勵(lì)工況系統(tǒng)動(dòng)態(tài)特性
車輛在行駛過程中,各車輪受到的路面激勵(lì)是隨機(jī)的。針對(duì)互連式油氣懸架,以單個(gè)油缸作為作動(dòng)缸,其它油缸作為隨動(dòng)缸,以此來模擬車輛行駛過程中單輪激勵(lì)工況,進(jìn)行系統(tǒng)動(dòng)態(tài)特性研究。
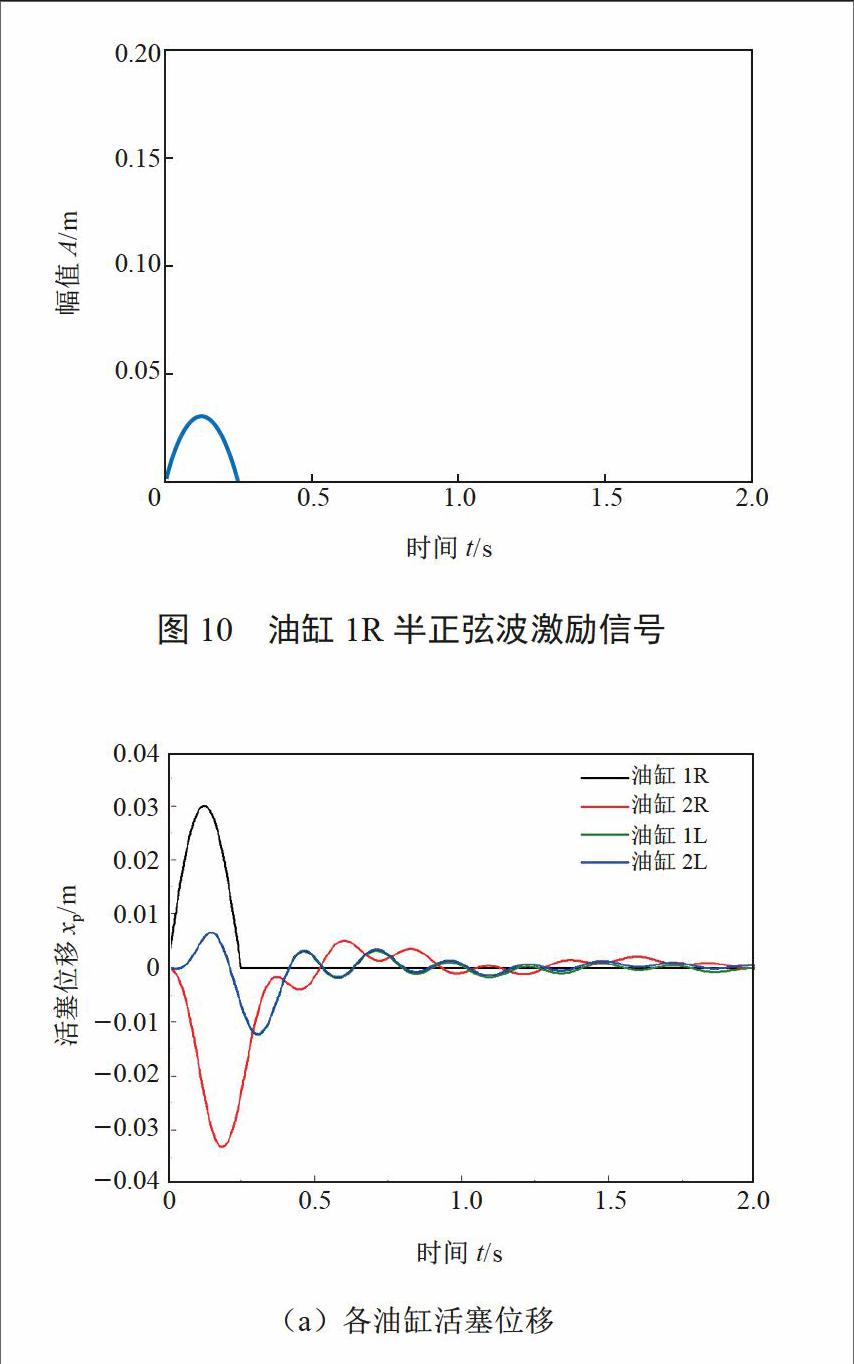
以油缸1R為作動(dòng)缸,給油缸1R加入2.0 Hz/
30 mm的半正弦激勵(lì)信號(hào),如圖10所示,模擬車輛以1 m/s的車速駛過一個(gè)高30 mm、跨度250 mm的減速帶。
由圖11a可知,油缸2R的位移與油缸1R相反,且油缸2R受到油路長(zhǎng)度等因素的影響,在相位上有一定的延遲。油缸1L與油缸2L的運(yùn)動(dòng)情況相同,位移曲線重合,且由于右側(cè)閥塊與左側(cè)閥塊之間的油路較長(zhǎng)且有很多阻尼閥,因此左側(cè)油缸受影響較小,產(chǎn)生的位移也較小。2 s左右,各油缸趨于穩(wěn)定,各油缸活塞位移變?yōu)?。
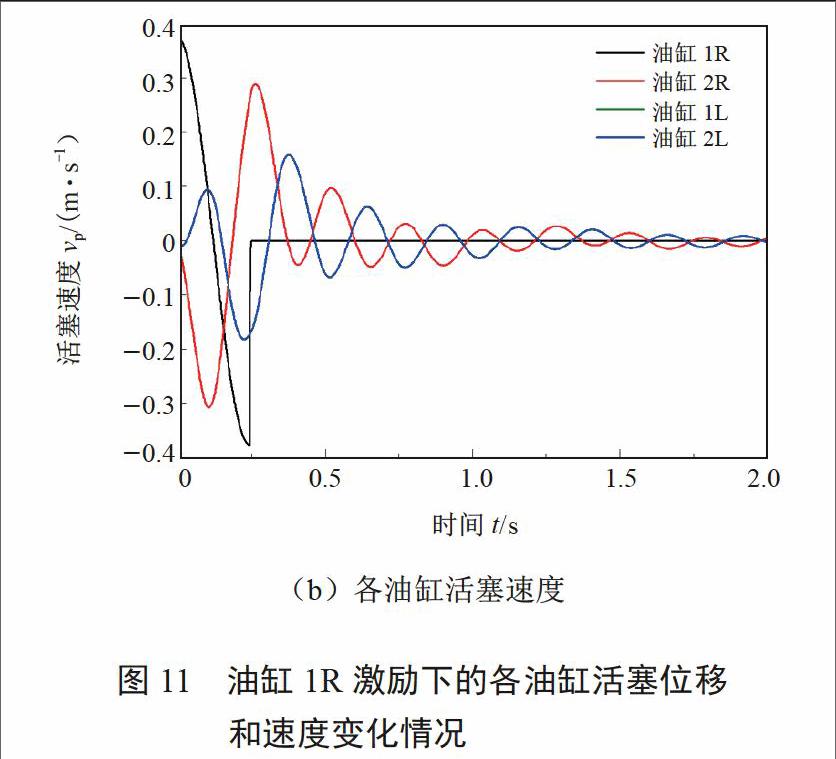
由圖11b可以得到相同的結(jié)論,油缸2R活塞產(chǎn)生相反方向的速度,且受影響較大;油缸1L、2L產(chǎn)生相同方向的速度,且受影響較小。由于油路和阻尼閥的影響,油缸2R、1L、2L活塞速度在相位上都有一定的延遲。
由圖12a可知,蓄能器A1R、A2R內(nèi)氣體壓力變化基本相同,蓄能器AfR內(nèi)的氣體壓力要比蓄能器A1R、A2R低一些;伸張行程則相反,油液從蓄能器A1R、A2R、AfR流入油缸1R無桿腔,蓄能器內(nèi)氣體壓力降低。
由圖12b可知,由于油缸1R、2R的有桿腔、無桿腔對(duì)應(yīng)連通的結(jié)構(gòu),油缸1R、2R活塞桿輸出力曲線基本重合。由于右側(cè)油缸與左側(cè)油缸有桿腔、無桿腔的交叉連通結(jié)構(gòu),油缸1L、2L活塞桿輸出力與油缸1R、2R活塞桿輸出力相位相反。油缸1R、2R都是隨動(dòng)缸,且連通結(jié)構(gòu)完全相同,因此,油缸1R、2R的活塞桿輸出力情況是相同的。
3.2 同側(cè)前后輪激勵(lì)工況系統(tǒng)動(dòng)態(tài)特性
針對(duì)互連式油氣懸架,采用同一側(cè)前后橋油缸同時(shí)受到激勵(lì)的方式來模擬車輛行駛過程中同側(cè)前后橋車輪同時(shí)受路面激勵(lì)工況,進(jìn)行系統(tǒng)動(dòng)態(tài)特性研究。
同理得到同側(cè)前后輪激勵(lì)工況下的數(shù)學(xué)模型,同側(cè)前后輪激勵(lì)工況下的互連式油氣懸架模型流程圖與圖6類似,只需將系統(tǒng)輸入替換為油缸1R、2R。
針對(duì)同側(cè)前后輪反相位激勵(lì)工況,以油缸1R、2R為作動(dòng)缸,油缸1L、2L為隨動(dòng)缸,給油缸1R、2R加入反相位2.0 Hz/30 mm的半正弦激勵(lì)信號(hào),如圖13所示。
由圖14a可知,油缸2R活塞位移相位與1R相反,油缸1L、2L活塞位移非常小,幾乎不受右側(cè)油缸的影響。圖14b為同側(cè)前后油缸1R、2R反相位激勵(lì)下的各油缸活塞速度變化情況,由速度圖同樣可以看出,油缸1L、2L活塞的速度非常小,受右側(cè)油缸的影響非常小。
由圖15a可知,由于油缸1R與2R有桿腔、無桿腔的對(duì)應(yīng)連通關(guān)系,以及反相位的激勵(lì),右側(cè)的三個(gè)蓄能器內(nèi)氣體壓力變化很小,只有0.1 MPa的上下波動(dòng)量。同樣,左側(cè)的三個(gè)蓄能器內(nèi)氣體壓力變化也很小。由圖15a還可知,右側(cè)蓄能器內(nèi)氣體的穩(wěn)定壓力要稍高于左側(cè)蓄能器的穩(wěn)定壓力。
由圖15b可知,由于油缸1R與2R有桿腔、無桿腔的對(duì)應(yīng)連通關(guān)系,以及反相位的激勵(lì),絕大部分的油液只在油缸1R、2R的有桿腔、無桿腔之間自由流動(dòng),因此,各油缸活塞桿的輸出力波動(dòng)很小。
3.3 同橋左右輪激勵(lì)工況模型及系統(tǒng)動(dòng)態(tài)特性
車輛在行駛過程中,會(huì)遇到左右車輪同時(shí)軋到凸臺(tái)或凹坑的情況,針對(duì)互連式油氣懸架,采用同一橋的左右兩個(gè)油缸同時(shí)受到激勵(lì)的方式來模擬車輛行駛過程中同一橋左右輪同時(shí)受到路面激勵(lì)的工況,進(jìn)行系統(tǒng)動(dòng)態(tài)特性研究。
同理得到同橋左右輪激勵(lì)工況下的數(shù)學(xué)模型,同橋左右輪激勵(lì)工況下的互連式油氣懸架模型流程圖與圖6類似,只需將系統(tǒng)輸入替換為1R、1L。
針對(duì)同橋左右輪同相位激勵(lì)工況,以油缸1R、1L為作動(dòng)缸,油缸2R、2L為隨動(dòng)缸,給油缸1R、1L加入同相位2.0 Hz/30 mm的半正弦激勵(lì)信號(hào),如圖16所示。
由圖17a可知,油缸2R、2L活塞位移變化情況相同,都呈反相位。由于油路及阻尼閥的影響,油缸2R、2L的位移在相位上有一定的延遲,經(jīng)過4 s,位移變?yōu)?,系統(tǒng)趨于穩(wěn)定。由圖17b可知,油缸2R、2L活塞速度變化情況相同,呈反相位,經(jīng)過4 s之后系統(tǒng)趨于穩(wěn)定。
圖18a可知,油缸1R、1L對(duì)各自一側(cè)的蓄能器的影響是相同的,因此,蓄能器A1R、A2R、A1L、A2L內(nèi)氣體壓力的變化規(guī)律是相同的,蓄能器AfR與AfL內(nèi)氣體壓力的變化規(guī)律是相同的,但在幅值上小于另外四個(gè)邊側(cè)蓄能器。由圖18b可知,四個(gè)油缸的活塞桿輸出力變化情況是相同的,這是由于同側(cè)油缸有桿腔、無桿腔對(duì)應(yīng)連通,右側(cè)與左側(cè)油缸有桿腔、無桿腔交叉連通,且系統(tǒng)是在油缸1R、1L同相位激勵(lì)下,造成了各油缸活塞桿的輸出力變化規(guī)律是相同的。
4 結(jié)論
(1)針對(duì)互連式油氣懸架系統(tǒng)結(jié)構(gòu)復(fù)雜的特點(diǎn),在建立各閥、蓄能器和油缸等部件模型的基礎(chǔ)上,采用模塊化建模的方法,根據(jù)系統(tǒng)中各部件的連通關(guān)系,分析互連式油氣懸架系統(tǒng)中各部件模型之間的輸入輸出關(guān)系,建立了互連式油氣懸架模型。
(2)基于建立的互連式油氣懸架模型,對(duì)互連式油氣懸架油缸活塞位移、油缸活塞速度、油缸輸出力、蓄能器內(nèi)的氣體壓力變化進(jìn)行分析,得到各工況下的互連式油氣懸架系統(tǒng)動(dòng)態(tài)特性。
(3)分析結(jié)果表明:在單輪激勵(lì)工況下,與作動(dòng)油缸同側(cè)的隨動(dòng)油缸及蓄能器產(chǎn)生同向的動(dòng)態(tài)變化,與作動(dòng)油缸異側(cè)的隨動(dòng)油缸及蓄能器產(chǎn)生反向的動(dòng)態(tài)變化,且同側(cè)的隨動(dòng)油缸受影響較大,異側(cè)的隨動(dòng)油缸受影響較小。
(4)在同側(cè)前后輪反相位激勵(lì)工況下,與作動(dòng)油缸異側(cè)的隨動(dòng)油缸受影響很小,系統(tǒng)中各蓄能器內(nèi)氣體壓力及各油缸輸出力變化也很小,系統(tǒng)動(dòng)態(tài)特性比較平和。
(5)在同橋左右輪同相位激勵(lì)工況下,系統(tǒng)中各蓄能器內(nèi)氣體壓力及各油缸輸出力變化規(guī)律都相同,即系統(tǒng)對(duì)稱部件的動(dòng)態(tài)特性完全相同。
由于互連式油氣懸架在平衡軸荷、剛度非線性、阻尼可調(diào)、抗側(cè)傾等方面有著顯著的優(yōu)勢(shì),所以被越來越多地應(yīng)用在多軸重型車輛上[1-5]。
多油缸互連式油氣懸架的各油缸上、下腔之間對(duì)應(yīng)或交叉連通,每個(gè)油缸與多條油路連通,每條油路中都裝有阻尼閥和蓄能器。阻尼閥的非線性、蓄能器內(nèi)氣體狀態(tài)變化的非線性、各油路之間交叉連通的非線性,致使互連式油氣懸架成為一個(gè)非常復(fù)雜的系統(tǒng)[6-9]。由于互連式油氣懸架結(jié)構(gòu)的復(fù)雜性,很難利用臺(tái)架試驗(yàn)對(duì)其系統(tǒng)動(dòng)態(tài)特性進(jìn)行研究,因此,很有必要對(duì)互連式油氣懸架進(jìn)行建模,對(duì)各種工況下的系統(tǒng)動(dòng)態(tài)特性進(jìn)行分析。
國(guó)內(nèi)外相關(guān)領(lǐng)域的學(xué)者從多方面應(yīng)用各種方法對(duì)油氣懸架進(jìn)行了深入的研究,但所研究對(duì)象多為結(jié)構(gòu)簡(jiǎn)單的單回路油氣懸架,且多為公式推導(dǎo)式的黑匣子建模方法,不便于中間結(jié)果的輸出,也不易對(duì)整個(gè)油氣懸架系統(tǒng)模型有一個(gè)透徹的認(rèn)識(shí)。
采用傳統(tǒng)的公式推導(dǎo)式建模方法已很難建立互連式油氣懸架模型。針對(duì)結(jié)構(gòu)復(fù)雜的互連式油氣懸架,本文采用模塊化建模方法,首先建立油氣懸架系統(tǒng)中各個(gè)部件的模型,然后通過對(duì)各部件模型的原理分析,確定各部件模型之間的輸入和輸出關(guān)系,最后根據(jù)油氣懸架系統(tǒng)的連接關(guān)系將各個(gè)部件模型連接起來,得到多工況下的互連式油氣懸架系統(tǒng)數(shù)學(xué)模型。模塊化的建模方法,便于中間結(jié)果的輸出,例如某個(gè)閥的流量、蓄能器任意時(shí)刻的壓力等,整體結(jié)構(gòu)非常清晰,能夠?qū)ο到y(tǒng)模型各部分之間的關(guān)系有一個(gè)透徹的認(rèn)識(shí),能夠?qū)?fù)雜的系統(tǒng)分割成一個(gè)個(gè)簡(jiǎn)單部件,適用于復(fù)雜系統(tǒng)的建模。
1 互連式油氣懸架結(jié)構(gòu)
某種用于四軸重型車輛的互連式油氣懸架,前兩橋連通結(jié)構(gòu)與后兩橋相同,一二橋的結(jié)構(gòu)如圖1所示。系統(tǒng)油缸為雙腔油缸,上腔為環(huán)形腔,下腔為無桿腔;前后橋同側(cè)油缸上、下腔對(duì)應(yīng)連通,同橋左、右側(cè)油缸上、下腔交叉連通。壓縮行程時(shí),油缸下腔的油液經(jīng)多條支路流向蓄能器,壓縮蓄能器內(nèi)的氣體產(chǎn)生彈性力,油液流過油路中的阻尼閥產(chǎn)生阻尼力。
為了實(shí)現(xiàn)多軸車輛的軸荷平衡及抗側(cè)傾功能,油氣懸架的各油缸之間是按照一定的規(guī)則連通的,這就不可避免地存在單個(gè)油缸連通多條支路的結(jié)構(gòu)。在不影響系統(tǒng)特性的前提下,省略系統(tǒng)中的部分電磁閥,對(duì)系統(tǒng)進(jìn)行簡(jiǎn)化處理,簡(jiǎn)化后的系統(tǒng)原理如圖2所示。
由圖2可知,互連式油氣懸架的油缸為雙腔油缸,同側(cè)前后橋油缸上、下腔對(duì)應(yīng)連通,實(shí)現(xiàn)平衡軸荷功能,同橋左、右側(cè)油缸上、下腔交叉連通,實(shí)現(xiàn)抗側(cè)傾功能。通過系統(tǒng)中的電磁閥控制,可以實(shí)現(xiàn)懸架剛度控制、側(cè)傾剛度控制、阻尼連續(xù)控制、車高控制、單輪隔離、單輪提升、剛性閉鎖等功能。
2 互連式油氣懸架模型
互連式油氣懸架系統(tǒng)中存在多條支路,每條支路中有多個(gè)閥,系統(tǒng)中有多個(gè)蓄能器,阻尼力的非線性和彈性力的非線性造成互連式油氣懸架系統(tǒng)是一個(gè)非常復(fù)雜的非線性耦合系統(tǒng),很難推導(dǎo)出顯式格式的彈性力、阻尼力、輸出力、系統(tǒng)壓力等的表達(dá)式。因此,通過模塊化的建模方法,得到整個(gè)油氣懸架系統(tǒng)的數(shù)學(xué)模型。
2.1 油缸無桿腔連通油路模型
復(fù)雜的連通關(guān)系導(dǎo)致了單個(gè)油缸與多條支路連通,以油缸1R為例,若油缸1R作為作動(dòng)缸,其它三個(gè)油缸為負(fù)載缸,定義無桿腔受壓縮時(shí)位移為正,無桿腔伸張時(shí)位移為負(fù),則油缸1R無桿腔的油路連通關(guān)系及油液流動(dòng)線路如圖3所示。分析可知,油缸1R無桿腔流出的油液有六個(gè)去處,分別為蓄能器A1R、蓄能器A2R、油缸2R無桿腔、蓄能器AfR、油缸1L有桿腔、油缸2L有桿腔。
建立油缸1R無桿腔壓力微分方程,如式(1)所示。
式中:p1R-p為油缸1R無桿腔的壓力,Pa;x1R、分別為油缸1R活塞位移和速度,m/s;Ap為油缸無桿腔橫截面積,m2;dp為油缸無桿腔直徑,m;dr是油缸有桿腔直徑,m;Q2R-p為油缸2R無桿腔流量,m3/s;QA1R為蓄能器A1R支路的流量,m3/s;QA2R為蓄能器A2R支路的流量,m3/s;QAfR為蓄能器AfR支路的流量,m3/s;QL為左側(cè)油缸1L、2L有桿腔油路中閥組的流量,m3/s;C1R-p為油缸1R無桿腔油路的容積模量,m3/Pa;Vb-p為靜平衡位置的油缸無桿腔容積,m3;Koil為油液體積模量,Pa。
其中,各個(gè)部分的流量可根據(jù)閥和蓄能器的傳統(tǒng)建模方法得到,這里不再詳述,只將各支路流量表示為壓差的函數(shù)形式[10-12],如式(2)所示。
式中:為油缸2R活塞速度,m/s;pA1R、pA2R、pAfR分別為蓄能器A1R、A2R、AfR內(nèi)氣體的壓力,Pa;p12L-r為油缸1L、2L有桿腔壓力,Pa。
2.2 油缸有桿腔連通油路模型
若油缸1R無桿腔受壓縮,則有桿腔為伸張,油液從別處流入油缸1R有桿腔,油缸1R有桿腔的油路連通關(guān)系及油液流動(dòng)線路如圖4所示。
分析可知,流入油缸1R有桿腔的油液有六個(gè)來源,分別為油缸2R有桿腔、蓄能器AfL、蓄能器A1L、蓄能器A2L、油缸1L無桿腔、油缸2L無桿腔。建立油缸1R有桿腔壓力微分方程[13],如式(3)所示。
式中:p1R-r為油缸1R有桿腔的壓力,Pa;Q2R-r為油缸2R有桿腔流量,m3/s;QA1L為蓄能器A1L支路的流量,m3/s;QA2L為蓄能器A2L支路的流量,m3/s;QAfL為蓄能器AfL支路的流量,m3/s;QR為油缸1R、2R有桿腔連通油路中閥組的流量,m3/s;C1R-r為油缸1R有桿腔油路的容積模量,m3/Pa;Vb-r為靜平衡位置的油缸有桿腔容積,m3。
其中,各個(gè)部分的流量同樣可根據(jù)閥和蓄能器的傳統(tǒng)建模得到,這里只將各支路流量表示為壓差的函數(shù)形式,如式(4)所示。
式中:pA1L、pA2L、pAfL分別為蓄能器A1L、A2L、AfL內(nèi)氣體的壓力,Pa;p12L-P為油缸1L、2L無桿腔壓力,Pa。
2.3 互連式油氣懸架模型
由式(1)~(4)可知,未知的參數(shù)包括油缸2R、1L、2L活塞的速度、、,利用牛頓定律,分別對(duì)三個(gè)油缸活塞列出受力平衡方程來求得三個(gè)活塞的速度。油缸活塞受力分析如圖5所示。油缸活塞共受五個(gè)作用力,分別為油缸無桿腔壓力 ppAp,油缸有桿腔壓力prAr,簧載質(zhì)量作用于活塞桿的重力msg,活塞桿自身的重力mpg,活塞與油缸之間的摩擦力Ff。油缸2R、1L、2L活塞動(dòng)力學(xué)方程如式(5)所示。
由式(5)可知,需求出油缸2R無桿腔壓力p2R-p和有桿腔壓力p2R-r,油缸1L無桿腔壓力p1L-p和有桿腔壓力p1L-r,油缸2L無桿腔壓力p2L-p和有桿腔壓力p2L-r。
由于油缸2R與1R直接連通,油路中不含任何閥,若忽略管路的壓力損失,則油缸2R的兩個(gè)腔與油缸1R的兩個(gè)腔具有相同的壓力,如式(6)所示。
油缸1L和2L也是直接連通,那么油缸1L的兩個(gè)腔與油缸2L的兩個(gè)腔具有相同的壓力。首先求油缸1L、2L有桿腔壓力(圖3),根據(jù)油缸1L、2L有桿腔連通油路中的閥組壓差/流量關(guān)系,又因油缸1L、2L負(fù)載和結(jié)構(gòu)參數(shù)相同,則油缸1L和2L的流量相同,即可得到油缸1L、2L有桿腔壓力與活塞速度關(guān)系式(7)。
如圖4所示,同理可求得油缸1L、2L無桿腔壓力與活塞速度關(guān)系式(8)。
其中,活塞和油缸之間的摩擦力采用基于Stribeck曲線擬合的公式來計(jì)算,如式(9)所示。
式中:fv表示粘性摩擦系數(shù);fc表示庫(kù)侖摩擦力,N; fs表示靜摩擦力,N;τs表示靜摩擦力因數(shù);表示活塞運(yùn)動(dòng)速度,m/s。
聯(lián)立式(1)~(9),結(jié)合傳統(tǒng)建模方法得到的各種閥和蓄能器的模型,將各式具體化,進(jìn)而在Matlab/Simulink中實(shí)現(xiàn)單輪激勵(lì)工況下的互連式油氣懸架數(shù)學(xué)模型[14],模型流程圖如圖6所示。
2.4 油氣懸架部件模型驗(yàn)證
為了驗(yàn)證所建立的油氣懸架主要閥、蓄能器、彈性力和阻尼力數(shù)學(xué)模型的正確性,進(jìn)行了臺(tái)架試驗(yàn)。試驗(yàn)設(shè)備采用車輛懸架測(cè)試系統(tǒng)(FCS佛力系統(tǒng)),將油缸豎直安裝在測(cè)試系統(tǒng)上,如圖7所示。
試驗(yàn)條件見表1。
所載入的載荷譜見表2。
在0.01 Hz/0.03 m載荷譜激勵(lì)情況下,由于油缸活塞運(yùn)動(dòng)速度非常小,油液流過阻尼閥產(chǎn)生的阻尼力幾乎為0,因此,可以近似認(rèn)為此時(shí)活塞桿的輸出力即為彈性力。
圖8a是原始數(shù)據(jù)及擬合曲線,黑色波動(dòng)的上下兩條曲線為原始試驗(yàn)曲線,可以近似認(rèn)為壓縮和伸張行程中的摩擦力大小相等,方向相反,兩條曲線的差值即為活塞與油缸之間摩擦力的兩倍,去除摩擦力之后再擬合的曲線如圖8a中的紅色曲線。圖8b中,黑色是仿真的彈性力曲線,紅色是彈性力試驗(yàn)擬合曲線,由圖可知,仿真曲線與試驗(yàn)曲線吻合較好,分析引起細(xì)微差別的可能原因,是由于試驗(yàn)部件中某些參數(shù)的不確定性以及橡膠油管的彈性變形。
在0.5 Hz/0.03 m和1.0 Hz/0.03 m載荷譜激勵(lì)情況下,活塞桿輸出力包括摩擦力、彈性力、阻尼力,活塞桿輸出力去除摩擦力和彈性力,得到阻尼力。仿真曲線與試驗(yàn)曲線對(duì)比如圖9所示。
圖9a和b分別是激勵(lì)0.5 Hz/0.03 m下的阻尼力-位移曲線對(duì)比和阻尼力-速度曲線對(duì)比,可以看出,仿真曲線與試驗(yàn)曲線吻合較好,表明仿真的結(jié)果比較接近實(shí)際情況。
上述仿真與試驗(yàn)對(duì)比表明,所建立的油氣懸架各部件模型是正確的,基于此模型所建立的互連式油氣懸架模型以及后續(xù)的系統(tǒng)特性分析是可信的。
3 各工況下的系統(tǒng)動(dòng)態(tài)特性
3.1 單輪激勵(lì)工況系統(tǒng)動(dòng)態(tài)特性
車輛在行駛過程中,各車輪受到的路面激勵(lì)是隨機(jī)的。針對(duì)互連式油氣懸架,以單個(gè)油缸作為作動(dòng)缸,其它油缸作為隨動(dòng)缸,以此來模擬車輛行駛過程中單輪激勵(lì)工況,進(jìn)行系統(tǒng)動(dòng)態(tài)特性研究。
以油缸1R為作動(dòng)缸,給油缸1R加入2.0 Hz/
30 mm的半正弦激勵(lì)信號(hào),如圖10所示,模擬車輛以1 m/s的車速駛過一個(gè)高30 mm、跨度250 mm的減速帶。
由圖11a可知,油缸2R的位移與油缸1R相反,且油缸2R受到油路長(zhǎng)度等因素的影響,在相位上有一定的延遲。油缸1L與油缸2L的運(yùn)動(dòng)情況相同,位移曲線重合,且由于右側(cè)閥塊與左側(cè)閥塊之間的油路較長(zhǎng)且有很多阻尼閥,因此左側(cè)油缸受影響較小,產(chǎn)生的位移也較小。2 s左右,各油缸趨于穩(wěn)定,各油缸活塞位移變?yōu)?。
由圖11b可以得到相同的結(jié)論,油缸2R活塞產(chǎn)生相反方向的速度,且受影響較大;油缸1L、2L產(chǎn)生相同方向的速度,且受影響較小。由于油路和阻尼閥的影響,油缸2R、1L、2L活塞速度在相位上都有一定的延遲。
由圖12a可知,蓄能器A1R、A2R內(nèi)氣體壓力變化基本相同,蓄能器AfR內(nèi)的氣體壓力要比蓄能器A1R、A2R低一些;伸張行程則相反,油液從蓄能器A1R、A2R、AfR流入油缸1R無桿腔,蓄能器內(nèi)氣體壓力降低。
由圖12b可知,由于油缸1R、2R的有桿腔、無桿腔對(duì)應(yīng)連通的結(jié)構(gòu),油缸1R、2R活塞桿輸出力曲線基本重合。由于右側(cè)油缸與左側(cè)油缸有桿腔、無桿腔的交叉連通結(jié)構(gòu),油缸1L、2L活塞桿輸出力與油缸1R、2R活塞桿輸出力相位相反。油缸1R、2R都是隨動(dòng)缸,且連通結(jié)構(gòu)完全相同,因此,油缸1R、2R的活塞桿輸出力情況是相同的。
3.2 同側(cè)前后輪激勵(lì)工況系統(tǒng)動(dòng)態(tài)特性
針對(duì)互連式油氣懸架,采用同一側(cè)前后橋油缸同時(shí)受到激勵(lì)的方式來模擬車輛行駛過程中同側(cè)前后橋車輪同時(shí)受路面激勵(lì)工況,進(jìn)行系統(tǒng)動(dòng)態(tài)特性研究。
同理得到同側(cè)前后輪激勵(lì)工況下的數(shù)學(xué)模型,同側(cè)前后輪激勵(lì)工況下的互連式油氣懸架模型流程圖與圖6類似,只需將系統(tǒng)輸入替換為油缸1R、2R。
針對(duì)同側(cè)前后輪反相位激勵(lì)工況,以油缸1R、2R為作動(dòng)缸,油缸1L、2L為隨動(dòng)缸,給油缸1R、2R加入反相位2.0 Hz/30 mm的半正弦激勵(lì)信號(hào),如圖13所示。
由圖14a可知,油缸2R活塞位移相位與1R相反,油缸1L、2L活塞位移非常小,幾乎不受右側(cè)油缸的影響。圖14b為同側(cè)前后油缸1R、2R反相位激勵(lì)下的各油缸活塞速度變化情況,由速度圖同樣可以看出,油缸1L、2L活塞的速度非常小,受右側(cè)油缸的影響非常小。
由圖15a可知,由于油缸1R與2R有桿腔、無桿腔的對(duì)應(yīng)連通關(guān)系,以及反相位的激勵(lì),右側(cè)的三個(gè)蓄能器內(nèi)氣體壓力變化很小,只有0.1 MPa的上下波動(dòng)量。同樣,左側(cè)的三個(gè)蓄能器內(nèi)氣體壓力變化也很小。由圖15a還可知,右側(cè)蓄能器內(nèi)氣體的穩(wěn)定壓力要稍高于左側(cè)蓄能器的穩(wěn)定壓力。
由圖15b可知,由于油缸1R與2R有桿腔、無桿腔的對(duì)應(yīng)連通關(guān)系,以及反相位的激勵(lì),絕大部分的油液只在油缸1R、2R的有桿腔、無桿腔之間自由流動(dòng),因此,各油缸活塞桿的輸出力波動(dòng)很小。
3.3 同橋左右輪激勵(lì)工況模型及系統(tǒng)動(dòng)態(tài)特性
車輛在行駛過程中,會(huì)遇到左右車輪同時(shí)軋到凸臺(tái)或凹坑的情況,針對(duì)互連式油氣懸架,采用同一橋的左右兩個(gè)油缸同時(shí)受到激勵(lì)的方式來模擬車輛行駛過程中同一橋左右輪同時(shí)受到路面激勵(lì)的工況,進(jìn)行系統(tǒng)動(dòng)態(tài)特性研究。
同理得到同橋左右輪激勵(lì)工況下的數(shù)學(xué)模型,同橋左右輪激勵(lì)工況下的互連式油氣懸架模型流程圖與圖6類似,只需將系統(tǒng)輸入替換為1R、1L。
針對(duì)同橋左右輪同相位激勵(lì)工況,以油缸1R、1L為作動(dòng)缸,油缸2R、2L為隨動(dòng)缸,給油缸1R、1L加入同相位2.0 Hz/30 mm的半正弦激勵(lì)信號(hào),如圖16所示。
由圖17a可知,油缸2R、2L活塞位移變化情況相同,都呈反相位。由于油路及阻尼閥的影響,油缸2R、2L的位移在相位上有一定的延遲,經(jīng)過4 s,位移變?yōu)?,系統(tǒng)趨于穩(wěn)定。由圖17b可知,油缸2R、2L活塞速度變化情況相同,呈反相位,經(jīng)過4 s之后系統(tǒng)趨于穩(wěn)定。
圖18a可知,油缸1R、1L對(duì)各自一側(cè)的蓄能器的影響是相同的,因此,蓄能器A1R、A2R、A1L、A2L內(nèi)氣體壓力的變化規(guī)律是相同的,蓄能器AfR與AfL內(nèi)氣體壓力的變化規(guī)律是相同的,但在幅值上小于另外四個(gè)邊側(cè)蓄能器。由圖18b可知,四個(gè)油缸的活塞桿輸出力變化情況是相同的,這是由于同側(cè)油缸有桿腔、無桿腔對(duì)應(yīng)連通,右側(cè)與左側(cè)油缸有桿腔、無桿腔交叉連通,且系統(tǒng)是在油缸1R、1L同相位激勵(lì)下,造成了各油缸活塞桿的輸出力變化規(guī)律是相同的。
4 結(jié)論
(1)針對(duì)互連式油氣懸架系統(tǒng)結(jié)構(gòu)復(fù)雜的特點(diǎn),在建立各閥、蓄能器和油缸等部件模型的基礎(chǔ)上,采用模塊化建模的方法,根據(jù)系統(tǒng)中各部件的連通關(guān)系,分析互連式油氣懸架系統(tǒng)中各部件模型之間的輸入輸出關(guān)系,建立了互連式油氣懸架模型。
(2)基于建立的互連式油氣懸架模型,對(duì)互連式油氣懸架油缸活塞位移、油缸活塞速度、油缸輸出力、蓄能器內(nèi)的氣體壓力變化進(jìn)行分析,得到各工況下的互連式油氣懸架系統(tǒng)動(dòng)態(tài)特性。
(3)分析結(jié)果表明:在單輪激勵(lì)工況下,與作動(dòng)油缸同側(cè)的隨動(dòng)油缸及蓄能器產(chǎn)生同向的動(dòng)態(tài)變化,與作動(dòng)油缸異側(cè)的隨動(dòng)油缸及蓄能器產(chǎn)生反向的動(dòng)態(tài)變化,且同側(cè)的隨動(dòng)油缸受影響較大,異側(cè)的隨動(dòng)油缸受影響較小。
(4)在同側(cè)前后輪反相位激勵(lì)工況下,與作動(dòng)油缸異側(cè)的隨動(dòng)油缸受影響很小,系統(tǒng)中各蓄能器內(nèi)氣體壓力及各油缸輸出力變化也很小,系統(tǒng)動(dòng)態(tài)特性比較平和。
(5)在同橋左右輪同相位激勵(lì)工況下,系統(tǒng)中各蓄能器內(nèi)氣體壓力及各油缸輸出力變化規(guī)律都相同,即系統(tǒng)對(duì)稱部件的動(dòng)態(tài)特性完全相同。
參考文獻(xiàn)(References):
CAO D,RAKHEJA S,SU C Y. Roll Plane Analysis of Interconnected Hydro-Pneumatic Suspension Struts [C]// ASME 2005 International Mechanical Engineering Congress and Exposition,2005:133-142.
CAO D,RAKHEJA S,SU C. Property Analysis of an X-coupled Suspension for Sport Utility Vehicles [J]. SAE International Journal of Passenger Cars Mechanical System,2009,1(1):853-862.
CAO D,RAKHEJA S,SU C Y. A Generalized Model of a Class of interconnected Hydro-Pneumatic Suspensions and Analysis of Pitch Properties [C]//ASME 2006 Inter-
national Mechanical Engineering Congress and Expo-sition,2006(1):137-146.
楊杰. 基于油氣懸架的阻尼可調(diào)技術(shù)研究 [D]. 北京:北京理工大學(xué),2009.
YANG Jie. Research on Adjustable Damping Technology Based on Hydropneumatic Suspension [D]. Beijing: Beijing Institute of Technology,2009. (in Chinese)
CAO D. Theoretical Analyses of Roll and Pitch-Coupled Hydro-Pneumatic Strut Suspensions [D]. Montreal: Concordia University,2008.
JOO F R. Dynamic Analysis of a Hydropneumatic Suspen-sion System [D]. Montreal:Concordia University,1991.
FELEZ J,VERA C. Bond Graph Assisted Models for Hydro-Pneumatic Suspensions in Crane Vehicles [J]. Vehicle System Dynamics,1987,16(5-6):313-332.
YOUSEFI A,LOHMANN B. Order Reduction of Nonlinear Hydropneumatic Vehicle Suspension [C]//Proceedings of the 2006 IEEE International Conference on Control Applications,Munich,2006:1404-1408.
ZHANG Junwei,CHEN Sizhong,YANG Lin. Research on Nonlinear Stiffness Characteristics of Hydro-Pneumatic Spring [J]. Applied Mechanics and Material,2012, 128-129:421-425.
REYBROUCK K. A Non Linear Parametric Model of an Automotive Shock Absorber [C]// SAE Techincal Paper 940869,1994.
楊杰,陳思忠,吳志成. 油氣懸架可控剛度阻尼設(shè)計(jì)與試驗(yàn) [J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(10):11-24.
YANG Jie,CHEN Sizhong,WU Zhicheng. Design and Testing on the Hydropneumatic Suspensions with Controllable Stiffness and Damping [J]. Transactions of the Chinese Society for Agricultural Machinery,2008, 39(10):11-24. (in Chinese)
張軍偉,陳思忠,吳志成. 剛度和阻尼均可調(diào)的油氣懸架設(shè)計(jì)與試驗(yàn) [J]. 汽車工程學(xué)報(bào),2013,3(2):106-112.
ZHANG Junwei,CHEN Sizhong,WU Zhicheng. Design and Test of a Hydropneumatic Suspension with Adjustable Stiffness and Damping [J]. Chinese Journal of Automotive Engineering,2013,3(2):106-112. (in Chinese)
ZHANG Junwei,CHEN Sizhong. Modeling and Study on Active Vibration Control of an Off-Road Vehicle [J]. Vehicle System Dynamics,2014,52(5):581-607.
張軍偉. 多軸重型車輛互連式油氣懸架系統(tǒng)特性研究 [D]. 北京:北京理工大學(xué),2015.
ZHANG Junwei. Research on System Characteristics of Interconnected Hydropneumatic Suspension for Multi-axle Heavy Vehicle [D]. Beijing:Beijing Institute of Technology,2009.(in Chinese)